| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
REGULATOARE AUTOMATE NELINIARE
Regulatoare bipozitionale
Caracteristici tipizate ale regulatoarelor neliniare.
Cele mai utilizate regulatoare neliniare sunt regulatoarele bipozitionale (RBP) si regulatoarele tripozitionale (RTP). Dupa cum s-a mai mentionat, functionarea regulatorului neliniare este caracterizata in regim stationar de o dependenta neliniara intre marimea de comanda c si abaterea aceasta dependenta este denumita si caracteristica statica, pentru a se sublinia ca este valabila numai in regim stationar .
In cazul regulatoarelor bipozitionale caracteristica statica ideala (care nu se realizeaza exact in practica) are aspectul din figura 4 si este denumita si caracteristica ideala de releu, intrucat functionarea RBP este similara cu a releelor, de multe ori constructia RBP incluzand un releu.
Din aspectul caracteristicii se constata ca daca valorile abaterii a satisface conditia a>0, la iesirea RBP se obtine marimea de comanda c=cmax=const≠0 iar pentru: a>0 rezulta c=0.
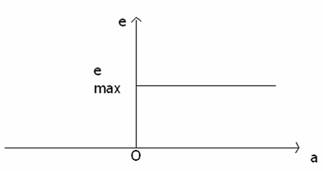
Fig. 4 Caracteristica ideala de releu
Denumirea de regulator bipozitional se datoreaza faptului ca marimea de comanda poate avea in regim stationar numai cele 2 valori.
In realitate, regulatoarele bipozitionale ca si releele nu au o caracteristica ideala, ci o caracteristica cu histerezis (figura 5), valorile marimii de comanda c depinzind si de sensul de variatie crestere sau descrestere a abaterii a.
Astfel, cand abaterea a creste, trecerea de la valoarea e=0 la valoarea e=emax nu are loc pentru conditia anterioara a>0, ci pentru conditia:a>h, unde h este jumatatea latimii ciclului de histerezis.
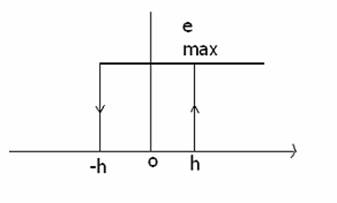
Fig. 5 Caracteristica reala de releu cu histerezis a regulatorului bipozitional
Regulatoarele bipozitionale sunt frecvent utilizate in sistemele de reglare unde nu se cer performante ridicate. In cea ce priveste marimea de iesire din sistem y, acceptanduse variatii ale acesteia intre doua limite a-priori fixate.
Regulatoarele
bipozitionale se utilizeaza la reglarea proceselor care au o constanta de timp
dominanta TPF si timpul mort t mic,
de obicei![]() .
.
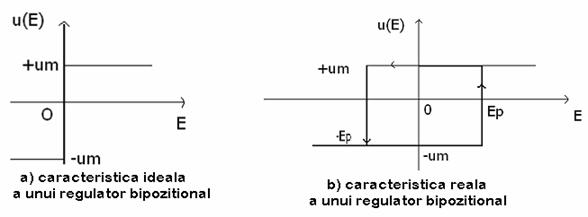
Fig.6 Depedenta intrare - iesire a unui regulator bipozitional
Regulatoarele bipozitionale se pot realiza si in varianta in care saltul marimii de iesire u sa se incadreze intre doua valori nesimetrice in raport cu nivelul zero. Se presupune de asemenea ca regulatorul are o constanta de timp proprie neglijabila. In mod obisnuit regulatoarele bipozitionale au o caracteristica reala de tip releu cu histerezis:



![]()

![]()
![]()
![]()

![]()
Imposibilitatea obtinerii unor valori intermediare pentru u intre -um si um reprezinta un dezavantaj al acestor regulatoare.
Obtinerea caracteristicii bipozitionale
In sistemul E caracteristicile bipozitionale ilustrate prin figura 1 si 2 se obtin prin intermediul unui tranzistor functionand in regim de comutatie si al unui releu electromagnetic conform schemei simplificate din figura 7
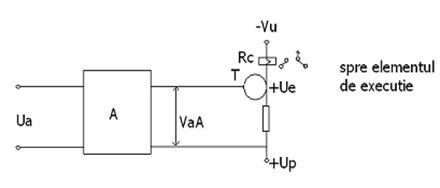
Fig. 7 Schema simplificata a unui regulator bipozitional
Tensiunea
Ua este proportionala cu
abaterea a care se poate avea valori pozitive sau negative si polaritatea tensiunii Ua se modifica in functie de sensul abaterii a. Amplificatorul A amplifica tensiunea
Ua, obtinandu-se la iesire
tensiunea amplifica UaA
(aplicata circuitului emitor - baza al tranzistorului T, care de asemenea isi modifica polaritatea in functie de semnul
abaterii a. Presupunand: ![]() deci
deci ![]() .
.
Tensiunea UaA are polaritatea cu plus la emitor si minus la baza jonctiunea emitor - baza este polarizata direct si tranzistorul T conduce ca urmare bobina releului electromagnetic RL conectata in circuitul de colector al trazistorului este parcursa de un curent important si releul RL isi inchide contactul, stabilind curentul prin elementelul de executie, de exemplu o rezistenta de incalzire (presupunand ca marimea reglata, de la iesirea sistemului, este o temperatura).
Datorita conectarii rezistentei de incalzire, temperatura e creste si la un moment dat relatia nu mai are loc intrucat marimea de intrare e (reprezentand valoarea prescrisa pentru marimea de iesire e) este constanta rezultand o relatie de forma: e>I.
Se
obtine astfel ![]() si o data cu schimbarea semnului abaterii isi
modifica polaritatea si tensiunile ua si uaA
va avea polaritate cu plus la baza si cu minus la colector, deci jonctiunea
emitor - baza este polarizata invers si tranzistorul este blocat, cea ce
determina deschiderea contactului releului
RL, intreruperea alimentarii rezistentei de incalzire si micsorarea temperaturii e pana cand este din nou indeplinita conditia.
si o data cu schimbarea semnului abaterii isi
modifica polaritatea si tensiunile ua si uaA
va avea polaritate cu plus la baza si cu minus la colector, deci jonctiunea
emitor - baza este polarizata invers si tranzistorul este blocat, cea ce
determina deschiderea contactului releului
RL, intreruperea alimentarii rezistentei de incalzire si micsorarea temperaturii e pana cand este din nou indeplinita conditia.
Se constata ca procesul reglarii bipozitionale are un caracter ciclic, marimea de iesire e avand valori care oscileaza in jurul valorii prescrise prin intermediul marimei de iesire e.
La sistemul SEROM un regulator bipozitional se realizeaza cu un amplificator operational cu circuite integrale (ADCI) la care sunt folosite ambele borne de intrare, iar semnalul de iesire este transmis in circuitul bazei unui tranzistor UpuT in circuitul de colector al tranzistorului este conectata bobina releului electromagnetic RL.
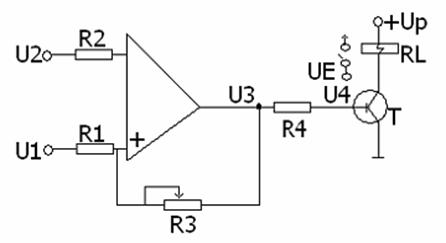
Fig. 8 Schema simplificata a unui regulator bipozitional, realizat cu un
amplificator operational cu circuite integrate (AOCL)
Circuitul de intrare al bornei neinversoare contine rezistenta R1 si primeste potentialul pozitiv u1, proportional cu marimea de intrare i a sistemului de reglare automata, iar circuitul de intrare al bornei inversoare care contine rezistenta R2 primeste potentialul cu marimea de iesire e a sistemului de reglare automata .
Facand deocamdata abstractie de rezistenta R3 (care realizeaza o reactie pozitiva intre iesire a AOCI unde rezulta tensiunea u3 si intrarea neinversoare) si tinand seama de valorile rezistentelor R1 si R2, se constata ca daca predomina efectul tensiunii u1 atunci va rezulta la iesirea AOCI tensiunea: u3>0 si deci pe baza tranzistorului Upu tensiunea u4>0 intrucat tensiunea pozitiva u1 este aplicata in circuitul bornei neinversoare.
Dimpotriva, daca predomina efectul tensiunii pozitive u2 atunci va rezulta: u3<0 si u4<0 deoarece tensiunea u2 este aplicata in circuitul bornei inversoare. Ca urmare in primul caz, tranzistorul Upu va fi in stare de conductie avand in vedere ca primeste un potential pozitiv pe baza, si releul RL actioneaza, comandand intrarea in functiune a elementului de executie (de exemplu conectarea unei rezistente de incalzire).
In al doilea caz, tranzistorul va fi blocat si releul RL ramane in repaus, deci se obtine o functionare analoaga cu cea din figura 7. Rezistenta reglabila R3 permite modificarea latimii ciclului de histerezis, rezistenta R4 limiteaza curentul bazei tranzistorului, iar tensiunile Up si Ue sunt obtinute de la sursele de alimentare.
II 2. Regulatoare tripozitionale
Regulatorul tripozitional ofera posibilitatea stabilirii unei valori suplimentare, intre -um si +um pentru marimea de comanda.
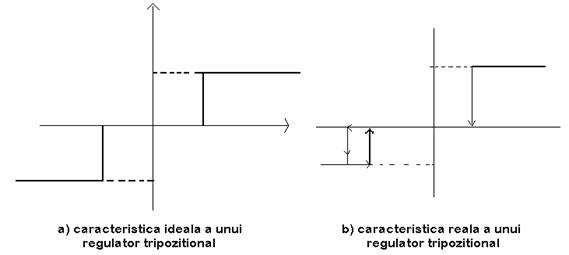
Fig.9 Regulator tripozitional
Dependenta intrare - iesire poate fi scrisa:

Intervalul de variatii a erorii (-Ep, +Ep) se numeste zona moarta a regulatorului. Pentru unele realizari industriale de regulatoare se realizeaza combinatia intre un bloc cu caracteristica continua, ce functioneaza in regim de semnal mic si un bloc de tip releu ce functioneaza la semnale mari, asigurand regimul de putere.
Obtinerea caracteristicii tripozitionale
Caracteristica tripozitionala, de tipul celei din figura 9 poate fi obtinuta cu ajutorul a doua blocuri bipozitionale; o asemenea solutie, utilizata in sistemele SEROM, este ilustrata in figura 10 fiecare din cele doua AOCI fiind conectat in cadrul unei scheme asemanatoare cu cea din figura 8.
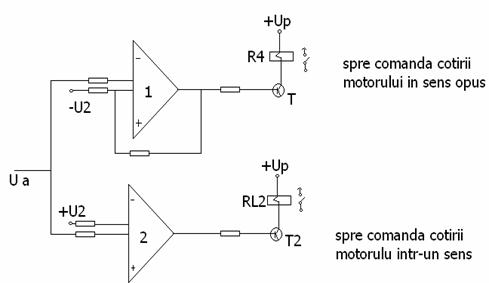
Fig.10 RTP realizat cu doi RBP
Tensiunea ua proportionala cu abaterea a este aplicata in circuitul bornei inversoare a AOCI 1 si in circuitul bornei neinversoare a AOCI 2; totodata, in circuitul bornei neinversoare a AOCI 1 este aplicata tensiunea constanta negativa -u2 corespunzatoare limitei zonei de insensibilitate, iar in circuitul bornei inversoare a AOCI 2 este aplicata tensiunea pozitiva +Uz, corespunzatoare limitei zonei de insensibilitate. Tranzistoarele UpuT1T2 si releele RL,RL2 sunt conectate ca in figura 8; schema comanda un element de executie realizat prin intermediul unui motor electric, care poate fi rotit in sens opus.
Inchiderea contactului releulu RL2 comanda rotirea motorului intr-un sens, inchiderea contactului releului RL1 comanda rotirea motorului in sens opus, iar cand ambele contacte sunt deschise motorul se gaseste in repaus.
Presupunand ca tensiunea Ua este pozitiva si ca predomina actiunea sa asupra tensiunii +u2, rezulta ca la iesirea AOCI 2 se obtine un potential pozitiv si tranzistorul T2 se va gasi in conductie, deci releul RL2 isi inchide contactul si comanda rotirea motorului intr-un sens.
In acelasi regim, la iesire AOCI 1 va rezulta un potential negativ la care contribuie semnalele aplicate la ambele borne deci tranzistorul T1 este blocat si releul RL 1 are contactul deschis.
Daca are loc relatia 3 si predomina actiunile tensiunilor -u2 si +u2 asupra actiunii tensiunii Ua atunci la iesirile ambelor AOCI se obtine potentiale negative, ambele tranzistoare sunt blocate, si ambele tranzistoare sunt blocate, si ambele relee isi pastreaza contactele deschise, motorul gasindu-se in repaus.
Cand tensiunea ua este negativa si actiunea sa predomina asupra tensiunii -u2, atunci, la iesirea AOCI 1 se obtine un potential pozitiv (tensiunea negativa ua fiind aplicata in circuitul bornei inversoare) conduce tranzistorul T1 si releul R2, comanda rotirea motorului in sens opus celui anterior.
In acest regim care corespunde portiunii din stanga a caracteristicii, la iesirea AOCI 2 se obtine un potential negativ (la care contribuie semnalele aplicate la ambele borne) si tranzistorul T2 este blocat, contactul releului RL2 ramanand deschis.
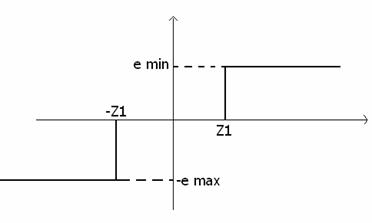
Fig. 11 Caracteristica ideala a regulatorului tripozitional
Domenii de utilizare a regulatoarelor bipozitionale si tripozitionale
Reglarea bipozitionala nu poate asigura o precizie ridicata, deoarece marimea reglata e oscileaza in jurul valorii prescrisei si deci nu poate ramane egala cu aceasta.
Pe de o parte, un bloc de reglare bipozitionala nu poate ramane egala cu aceasta.
Pe de alta parte,un bloc de reglare bipozitionala nu poate sa alimenteze un element de executie e realizat cu un motor electic, deoarece fie nu s-ar putea asigura inversarea sensului de rotatie al motorului, fie aceasta inversare s-ar asigura conectand borna la un potential negative UE, care s-ar transmite spre elementul de executie cand bobina releului RL nu este parcursa de curent. In acest caz ar rezulta o uzura foarte intensa a motorului, deoarece pentru acesta nu ar exista o pozitie de repaus; tot timpul motorul s-ar roti intr-un sens sau altul, cu inversari suprasolicitari si efecte grave.
Ca urmare, regulatoarele bipozitionale se folosesc ca elemente de executie de tipul contactoarelor si intrerupatoarelor.
Ca si regulatoarele bipozitionale, regulatoarele tripozitionale nu pot realiza o precizie ridicata a functionarii, datorita prezentei zonei de insensibilitate. Spre deosebire de regulatoarele bipozitionale, regulatoarele tripozitionale pot comanda elemente de executie realizate cu motoare electice (care actioneaza, de exemplu, ventile in sensul inchiderii sau deschiderii pentru modificarea unor debite), datorita si posibilitatii de comanda a rotirii in ambele sensuri.
Ca urmare regulatoarele tripozitionale functioneaza, de regula, in cadrul unor sisteme in care elementele de executie sunt realizate prin intermediul unor motoare electrice.
BIBLIOGRAFIE
F. Mares, T. Balasoiu, Gr. Fetecau, S. Enache, D. Federenciuc - "Elemente de comanda si control pentru actionari si sisteme de reglare automata", Editura Economica-Preuniversitara, Bucuresti, 2002;
S. Calin, S. Popescu - "Aparate, echipamente si instalatii de electronica industriala -AUTOMATIZARI", Editura Didactica si Pedagogica, R.A., Bucuresti, 1993;
S. Hilohi, M. Popescu, M. Huhulescu - "Instalatii si echipamente", Editura Didactica si Pedagogica, R.A., Bucuresti, 1993;
N.V. Botan, C. Botan, D. Mihoc, I. Papadache, St. Popescu - "Actionari si automatizari", Editura Didactica si Pedagocica, Bucuresti, 1979.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 4292
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved