| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Modelul matematic al comportarii dinamice al unei structuri articulate utilizate in constructia manipulatoarelor si robotilor industriali, face legatura intre torsorul fortelor si momentelor care actioneaza asupra corpurilor componente si miscarea imprimata acestor corpuri. Modelele matematice pun in evidenta legatura intre coordonatele robot de ordinul unu, doi si trei, si torsorul forta-moment. In final se va putea determina dependenta analitica a acceleratiilor relative, a vitezelor relative, functie de fortele si momentele active aplicate in cuple.
Modelul dinamic al unei structuri de manipulare este constituit din ecuatiile de miscare ale sistemului mecanic format de corpurile structurii, sub actiunea fortelor exterioare.
Intrarile sistemului dinamic sunt fortele si momentele motoare, iar iesirile sunt coordonatele si vitezele generalizate. Modelul dinamic complet este format din modelul dinamic al structurii de manipulare si modelul dinamic al sistemului de actionare.
Modelul dinamic complet permite:
-studiul si simularea comportarii manipulatorului;
-studiul comparativ al diversilor termeni constitutivi in vederea obtinerii unui model simplificat;
-efectuarea sintezei comenzii miscarii structurii mecanice de manipulare;
-stabilirea torsorului forta-moment in scopul alegerii corespunzatoare a elementelor de actionare;
Modelarea matematica a comportarii dinamice se efectueaza tinand cont de unele ipoteze simplificatoare dintre care mentionam:
-rigiditatea corpurilor structurii de manipulare-este introdusa numai prin intermediul unor indicatori globali cum ar fi frecventa proprie structurala si frecventa proprie a sistemului de actionare;
-fortele de frecare uscata si vascoasa-sunt introduse in mod global prin cuprinderea lor in valorile fortelor rezistente, la nivelul fiecarui mecanism;
-jocurile de marime neglijabila, sunt incluse in precizia de deplasare pe fiecare grad de mobilitate;
Pentru structuri mecanice reale, cu sase sau mai multe grade de mobilitate, modelarea trebuie asistata de calculator, deoarece este laborioasa si cu posibilitate mare de eroare.
Din punct de vedere teoretic, mecanismele spatiale active folosite in constructia robotilor si manipulatoarelor sunt structuri cinematice spatiale complexe (cu lanturi cinematice deschise sau inchise), variabile (lanturile cinematice se pot inchide sau deschide pe parcursul miscarii), cu un numar mare de corpuri (unele cu lungimi variabile) si cu grade de mobilitate controlate de sisteme de comanda (analogice sau numerice).
Aceste structuri sunt descrise matematic de sisteme de ecuatii neliniare algebrice si diferentiale, multivariabile si cuplate.
Functie de structura topologica, mecanismele active se pot clasifica in mecanisme simple (formate dintr-un singur lant cinematic) si mecanisme complexe (formate dintr-o multime de lanturi cinematice).
Lanturile cinematice simple pot fi inchise sau deschise, iar cele complexe pot fi arborescente (formate numai din lanturi cinematice simple si deschise) sau combinate (formate din lanturi cinematice deschise si inchise).
Un robot, spre exemplu, care este utilizat la montaj in momentul montarii obiectului de manipulat se transforma intr-un robot cu lant cinematic inchis, iar toate translatiile de pozitionare a obiectului de manipulat au determinat variatia elementelor geometrice ale structurii.
Variabilitatea structurii mecanice, numarul mare de grade de mobilitate si actionarea independenta a fiecarui grad de mobilitate sunt caracteristicile principale care deosebesc robotii de manipulare de mecanismele spatiale clasice.
Una din problemele complexe ale roboticii este modelarea matematica a structurilor mecanice de manipulare automata. Metodele de modelare utilizate pe scara larga se bazeaza pe formalismele Newton-Euler, Lagrange, Hamilton, Gibbs-Appell.
Metodele de modelare care utilizeaza formalismul Newton-Euler folosesc ecuatiile de miscare ale fiecarui corp component al structurii si ecuatiile de legatura intre corpurile succesive. Aceste metode sunt foarte complexe necesitand si eliminarea fortelor si momentelor de legatura intre corpurile componente ale structurii de manipulare. Ele nu pun in evidenta direct valorile algebrice ale fortelor si momentelor datorate sistemului de actionare. Modelul dinamic este obtinut prin aplicarea iterativa, pe structura de lant cinematic deschis, pentru fiecare corp, a teoremei momentului cinetic, a teoremei impulsului, tinand cont de legaturi.
Din punct de vedere istoric se pot enumera urmatoarele metode care au la baza formalismul Newton-Euler:
- H.J.Fletcher, L.Rongved si E.Y.Yu (1963) au studiat miscarea unui satelit format din doua corpuri rigide, sub actiunea fortelor gravitationale;
- W.W.Hooker si G.Marquiles (1965) au extins modelarea la structuri cu n+1 corpuri articulate prin cuple de rotatie sau translatie;
- R.E.Roberson si J.Wittenburg au asociat grafuri la structurile cinematice arborescente analizate. Folosirea teoriei grafurilor a usurat procesul de analiza a structurilor complexe;
- P.W.Likins a numerotat corpurile componente ale structurii in ordine crescatoare de la baza spre corpul condus, a atasat corpurilor repere de coordonate si a descompus o cupla cinematica cu mai multe grade de mobilitate in cuple simple cu un grad de mobilitate. Perfectionarile aduse metodelor precedente au permis simplificarea ecuatiilor de miscare si exprimarea lor sub forma matriciala;
J.Wittenburg a generalizat metoda precedenta pentru structuri arborescente in care cuplele de rotatie si cele de translatie pot avea pana la trei grade de mobilitate;
F.W.Ossemberg (1973) a aplicat metoda lui P.W. Likins si pentru structuri mecanice cu lanturi cinematice inchise;
M.Vukobratovic (1982) a prezentat o metoda de generare automata a ecuatiilor de miscare, implementabila pe calculator;
Metodele de modelare bazate pe formalismul Lagrange permit generarea ecuatiilor de miscare functie de marimile de comanda aplicate sistemelor de actionare.
Ecuatiile Lagrange de speta a II-a utilizate au forma:
![]()
unde:
L-diferenta intre energia cinetica totala a mecanismului si energia sa
potentiala, in ipoteza miscarii simultane;
W-lucrul mecanic virtual al structurii de manipulare in ipoteza miscarii
simultane;
![]() -coordonata generalizata de pozitie;
-coordonata generalizata de pozitie;
![]() -coordonata generalizata de viteza;
-coordonata generalizata de viteza;
![]() -torsorul forta-moment;
-torsorul forta-moment;
Metoda torsorului P-Q utilizeaza ecuatiile Newton-Euler. Eliminarea dezavantajului izolarii corpurilor cu introducerea suplimentara a fortelor de legatura a fost eliminata prin introducerea matricilor de incidenta si transfer.
Metoda prezinta avantajul utilizarii ecuatiilor matricial-vectoriale cu posibilitatea implementarii usoare a modelului matematic pe calculator.
Graful asociat unei structuri articulate reprezinta schema bloc de legaturi cu sens bine precizat, care caracterizeaza o anumita structura de manipulare. In cadrul unui graf corpurile sunt reprezentate prin cercuri si cuplele prin laturi. Sensul de generare al grafului se stabileste prin conventie - de la element catre culisa si de la element catre cupla de rotatie.
Aplicatie. Determinarea grafului asociat structurii de manipulare de tip pistol.
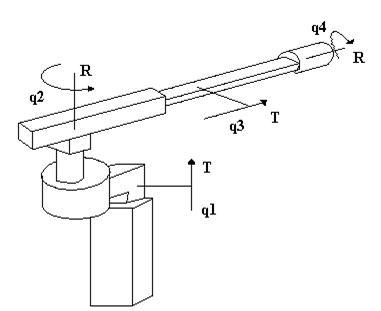
Fig 1. Desen robot
Schema cinematica
Schema cinematica structurala a robotului de tip pistol este prezentata in fig.2.
Pe baza conventiei facute, graful asociat structurii de mai sus va fi:
![]()
Fig 2.
Matricile de incidenta si transfer elimina inconvenientul metodelor care utilizeaza modelul Newton-Euler si anume asigura introducerea semnului cu care fortele si momentele din legaturi ar fi fost inscrise pe corpurile incidente. Matricile de incidenta de tip corpuri-cuple se vor nota cu (G) si matricile de tip cuple-corpuri cu (Z).
Determinarea matricii de incidenta de tip corpuri-cuple presupune ca mai intai sa se determine pe baza tabelara legaturile dintre diversele corpuri cu respectarea conventiei facute, pentru generarea grafului asociat structurii de manipulare.
Tabelul se determina pe baza grafului asociat structurii. Pentru exemplificare vom lua structura de tip pistol TRTR (fig.1, fig.2) si graful asociat acestei structuri fig.3.
Tabelul asociat structurii va fi de forma:
cuple ----------- 1 2 3 4
corpul ik- 0 1 2 3
corpul ik+ 1 2 3 4
Corpul 0 reprezinta batiul structurii de manipulare sau corpul considerat fix.
Elementele Gi, k ale matricii de incidenta corpuri-cuple cuprind elementele:
-1 daca latura k iese din nodul i;
+1 daca latura k intra in nodul i;
0 daca latura k nu este legata de nodul i;
(laturile reprezinta in cadrul grafului, cuplele, iar nodurile corpurile)
Pe baza definitiei elementelor matricii si tinand cont de tabelul ce exprima modul de legatura al corpurilor din cadrul structurii de manipulare, se obtine matricea corpuri-cuple a structurii de manipulare a robotului de tip pistol:
dupa izolarea batiului si a cuplelor care determina contururile inchise se obtine:
In caz
general matricea de tip ![]() cuprinde:
cuprinde:

unde: -G1-este partitia de matrice corespunzatoare batiului si cuprinde o linie si n coloane,
unde n reprezinta numarul corpurilor mobile ale structurii de manipulare;
-G1*-este partitia de matrice corespunzatoare batiului si cuprinde cuplele care
formeaza contururile inchise ale structurii - partitia de matrice cuprinde o linie si
n-k=c coloane, unde k este numarul total de cuple, iar c este numarul de cuple
sectionate in vederea obtinerii arborelui grafului;
-G-este partitia de matrice care cuprinde n linii si n coloane corespunzatoare corpurilor
mobile ale structurii de manipulare;
-G*-este partitia de matrice care cuprinde n linii si n coloane corespunzatoare celor n
corpuri mobile si c cuple sectionate;
Determinarea elementelor matricii de incidenta de tip cuple-corpuri se realizeaza prin parcurgerea grafului asociat structurii analizate, de la corpul i catre batiu
Pentru structura de tip pistol matricea de incidenta cuple-corpuri va avea expresia:
Conditia de verificare a corectei determinari a acestor matrici este:
![]()
unde : matricea U este matricea unitate;
Presupunem existenta unui sistem articulat cu n corpuri mobile si k cuple, unde k>n, deci cu c cicluri.
In vederea obtinerii arborelui grafului asociat structurii de manipulare vom proceda la sectionarea a c cuple. Notam cuplele sectionate cu k*.
Corpul i este cuplat de restul structurii articulate prin intermediul cuplelor k1, k2, k1*, conform portiunii de graf din fig.4.
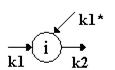
fig. 4.
unde:
k1 -este latura ce intra in nod;
k2 -este latura ce iese din nod;
k1*-este latura sectionata in scopul obtinerii arborelui grafului;
Presupunem ca pe corpul i actioneaza urmatoarele forte si reactiuni fig.5.
Fig.5.
unde:
rgi-vectorul de pozitie al centrului de greutate al corpului i;
mi-masa corpului i;
gi-pozitia centrului de greutate pe corpul i;
Nk1-reactiunea din cupla k1;
Mk1-momentul din cupla k1;
Nk2-reactiunea negativa din cupla k2 (conform sensului din graf);
Mk2-momentul negativ din cupla k2;
Nk1*-reactiunea din cupla sectionata k1*;
Mk1*-momentul din cupla sectionata k1
bk1-vectorul bratului reactiunii din cupla k1;
bk2-vectorul bratului reactiunii din cupla k2;
bk1*-vectorul bratului reactiunii din cupla k1*;
![]() -vectorul fortelor rezistente aplicate in centrul de
greutate al corpului i;
-vectorul fortelor rezistente aplicate in centrul de
greutate al corpului i;
![]() -vectorul momentelor
rezistente aplicate in centrul de greutate al
-vectorul momentelor
rezistente aplicate in centrul de greutate al
corpului i;
Scriind suma reactiunilor la nivelul corpului i obtinem:
![]()
sau daca se introduc elementele matricii de incidenta corpuri-cuple:
![]()
Se observa ca semnele reactiunilor au fost eliminate prin introducerea elementelor matricii de incidenta corpuri-cuple, relatia anterioara putand fi rescrisa, daca grupam cuplele nesectionate, sub forma:
![]()
Daca aplicam teorema impulsului la nivelul corpului i obtinem:
![]()
Daca generalizam relatia precedenta la nivelul intregii structuri de manipulare cu n corpuri mobile, obtinem relatia matricial-vectoriala de forma:
Dupa inmultirea matricii de incidenta corpuri-cuple cu matricea coloana a reactiunilor obtinem:
![]()
Daca inmultim la stanga si intr-un membru si in celalalt cu matricea de incidenta cuple-corpuri se obtine:
![]()
Tinand
cont de produsul dintre matricile de incidenta corpuri-cuple si
cuple-corpuri, operand notatia ![]() si grupand altfel termenii se obtine:
si grupand altfel termenii se obtine:
![]()
relatie matricial-vectoriala care exprima echilibrul fortelor la nivelul structurii de manipulare.
Notand
cu ![]() relatia precedenta devine:
relatia precedenta devine:
![]()
Relatia:
![]() reprezinta
expresia matricial-vectoriala a fortelor active aplicate in cuple.
reprezinta
expresia matricial-vectoriala a fortelor active aplicate in cuple.
Relatiile matricial-vectoriale a reactiunilor si fortelor active din cuple scrise pentru n corpuri mobile, devin:
Matricea maselor are expresia:
Matricea fortelor rezistente aplicate in centrul de greutate al fiecarui corp se defineste astfel:
 , unde
, unde ![]() sunt fortele
rezistente reduse fata de sistemul cartesian fix, zero.
sunt fortele
rezistente reduse fata de sistemul cartesian fix, zero.
Matricea acceleratiilor absolute ale centrelor de greutate va fi definita de relatia:
Expresiile scalare ale relatiilor matricial-vectoriale ale reactiunilor si fortelor active, pentru miscarea in plan si in spatiu se exprima astfel:
unde ![]() si
si![]() sunt matricile transformate ale matricii de
incidenta cuple-corpuri si respectiv, matricii maselor.
Elementele acestor matrici se determina prin inmultirea fiecarui
element al matricii initiale cu matricea unitate pentru spatiu
sunt matricile transformate ale matricii de
incidenta cuple-corpuri si respectiv, matricii maselor.
Elementele acestor matrici se determina prin inmultirea fiecarui
element al matricii initiale cu matricea unitate pentru spatiu  si respectiv,
pentru plan
si respectiv,
pentru plan ![]() .
.
Pe baza fig.5. scriem teorema conservarii momentului cinetic la nivelul corpului i si se obtine:
![]()
Daca introducem elementele matricii de incidenta corpuri-cuple pentru a elimina sensul fortelor si momentelor, se obtine relatia scalara:
![]()
Daca grupam termenii care contin cuple sectionate separat de cele nesectionate si scriem sub forma de sume, se obtine:
![]()
Relatia se rescrie vectorial sub forma:
![]()
Daca
notam elementele de tip ![]() , ecuatia matriciala pentru intreaga structura
a robotului, va fi:
, ecuatia matriciala pentru intreaga structura
a robotului, va fi:

unde: matricea B este matricea brat.
Dupa inmultirea la stanga cu matricea de incidenta cuple-corpuri si tinand cont de proprietatea produsului dintre matricile de incidenta, se obtine:
![]()
Daca
inlocuim expresia matricii ![]() cu expresia
determinata anterior si dupa unele grupari de termeni, se
obtine:
cu expresia
determinata anterior si dupa unele grupari de termeni, se
obtine:
![]()
Daca
notam cu Q expresia matricial vectoriala a momentelor active aplicate
in cuple si cu![]() matricea brat modificata, se obtine
urmatoarea forma a expresiei matricial-vectoriale a vectorului
momentelor rezistente din cuple:
matricea brat modificata, se obtine
urmatoarea forma a expresiei matricial-vectoriale a vectorului
momentelor rezistente din cuple:
![]()
Relatia matricial-vectoriala a momentelor rezistente si active din cuple pentru o structura cu n corpuri mobile si c contururi inchise va fi de forma:
Scalar aceste relatii se scriu pentru plan si pentru spatiu, astfel:
unde produsele dintre doi vectori s-au transformat in produse scalare dintre matricea antisimetrica a primului vector si matricea celui de al doilea.
Elementele matricii brat Bi,k sunt determinate de:
![]()
iar ![]() este determinat cu
relatia:
este determinat cu
relatia:
![]()
unde:
rk,0-este vectorul de pozitie absoluta a cuplei k;
rgi,0-este vectorul de pozitie absoluta a centrului de greutate al corpului i;
Matricea
![]() se determina cu
relatia:
se determina cu
relatia:
unde ![]() este partitia de
matrice a momentului rezistent redus in centrul de greutate al corpului i, iar
matricea
este partitia de
matrice a momentului rezistent redus in centrul de greutate al corpului i, iar
matricea ![]() este matricea
momentelor rezistente aplicate in centrele de greutate si reduse
fata de sistemul de referinta considerat fix.
este matricea
momentelor rezistente aplicate in centrele de greutate si reduse
fata de sistemul de referinta considerat fix.
Matricea
![]() este matricea
absoluta a variatiei momentului cinetic si are expresia:
este matricea
absoluta a variatiei momentului cinetic si are expresia:
Expresia variatiei momentului cinetic o determinam plecand de la definitia momentului cinetic:
![]()
Prin derivarea expresiei precedente si tinand cont de derivarea unui vector fata de un sistem mobil, se obtine expresia variatiei momentului cinetic:
![]()
Scriind relatia matricial-scalara pentru spatiu si pentru plan, se obtine:
unde ![]() este tensorul de inertie al
corpului i definit de expresia :
este tensorul de inertie al
corpului i definit de expresia :
 , iar celelalte componente au fost deja definite.
, iar celelalte componente au fost deja definite.
Momentele de inertie axiale Jxx, Jyy, Jzz se determina cu relatiile:
iar cele centrifugale cu relatiile:

Modul de determinare al tensorilor de inertie pentru diverse corpuri poate fi urmarit in capitolul de aplicatii al lucrarii.
Metoda de analiza a comportarii dinamice a structurilor articulate deschise utilizate in constructia manipulatoarelor si robotilor industriali, pe baza ecuatiilor Lagrange de speta a II-a are avantajul ca, corpurile nu trebuie izolate, modelul dinamic al comportarii dinamice scriindu-se fara a apela la fortele de legatura din cuple, pentru eliminarea carora ar fi fost necesare un numar suplimentar de ecuatii.
Metoda este aproximativa, neluand in calcul pozitia centrelor de greutate, torsorul forte-momente, reducandu-se in originea sistemelor de coordonate, proprii corpurilor componente ale structurii. De asemenea fortele de frecare uscata si vascoasa nu sunt evidentiate, acestea fiind prevazute global in valoarea fortelor active Fi. Energia potentiala de deformatie este neglijata considerandu-se ca variatia coordonatelor de miscare este influentata preponderent de ceilalti parametri. In acest caz, L=Ec.
Formalismul bazat pe ecuatiile Lagrange de speta a II-a utilizeaza ipotezele simplificatoare evidentiate anterior.
Modelul matematic se bazeaza pe generarea ecuatiilor Lagrange de tipul:
![]()
unde:
E-este energia cinetica de la nivelul intregii structuri;
q-este coordonata de pozitie relativa sau coordonata robot;
![]() -este coordonata de viteza relativa
generalizata;
-este coordonata de viteza relativa
generalizata;
W-este lucrul mecanic virtual;
Q-este torsorul forta-moment;
Modelul matematic nu tine seama de energia potentiala, determinata de fortele de greutate aplicate in originile sistemelor de coordonate, intrucat impreciziile determinate de cedarile elastice sau plastice, sunt de circa 20 de ori mai mici decat impreciziile determinate de sistemul cinematic si de conducere a structurii robotizate.
Metoda de generare a ecuatiilor comportarii dinamice a structurii articulate deschise prin metoda ecuatiilor Lagrange de speta a doua cuprinde urmatoarele etape:
-determinarea schemei cinematice-structurale pe baza robotului studiat;
-definirea in fiecare cupla a sistemului cartesian propriu corpului respectiv;
-inscrierea
pe schema cinematica-structurala a elementelor geometrice li,![]() ;
;
-inscrierea pe schema cinematica-structurala a coordonatelor robot qi;
-inscrierea pe schema cinematica-structurala a fortelor active Fi, a momentelor active Mi si
a fortelor rezistente Pi;
-inscrierea
directiilor de miscare ![]() ;
;
-determinarea energiei cinetice a intregii structuri in ipoteza miscarii simultane pe toate
axele;
-reducerea tuturor momentelor de inertie exprimate fata de alte directii decat cele care
traverseaza corpul;
-calculul derivatelor totale si partiale in functie de coordonatele de pozitie, viteza si de timp;
-determinarea lucrului mecanic virtual elementar;
-calculul derivatelor partiale ale lucrului mecanic virtual elementar functie de coordonatele
robot;
Modelul matematic va cuprinde un numar de ecuatii egal cu numarul gradelor de mobilitate;
Din punct de vedere istoric se pot enumera urmatoarele lucrari care folosesc in procedurile de modelare, formalismul Lagrange:
-J.J.Uicker (1968) a generat ecuatiile de miscare a structurilor mecanice arbitrare sub forma matriciala;
-M.E.Kahn, A.K.Bejczy si R.A.Lewis au dezvoltat metoda propusa de J.J.Uicker si au aplicat-o pentru diferite structuri particulare;
-M.Renaud (1977, 1980) a dezvoltat metoda matriciala de calcul a ecuatiilor Lagrange pentru structuri mecanice arborescente;
-J.Zabala (1978) a propus un algoritm de automatizare a modelarii structurilor mecanice arborescente, folosind metodele dezvoltate de M.Renaud;
-A.Davidoviciu, Gh.Draganoiu si A.Moanga (1972) au dezvoltat o metoda originala de automatizare a modelarii structurilor mecanice complexe, bazata pe grupe minimale;
Metodele amintite au reprezentat contributii la procedeul de automatizare a modelarii structurilor mecanice de manipulare.
Aplicatie. Studiul comportarii dinamice cu ajutorul ecuatiilor Lagrange de speta a doua a robotului de tip pistol, MHU Senior, fig.2.
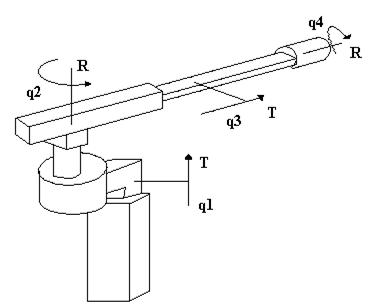
Fig. 6
Schema cinematica-structurala a robotului este prezentata in fig.2
SCHEMA ROBOT
In urma parcurgerii etapelor deja prezentate, a rezultat pe baza structurii robotului din fig.6., schema cinematica-structurala de mai sus.
Expresiile energiei cinetice pentru fiecare corp vor fi:
Conform teoremei lui Steiner obtinem:
Energia cinetica totala va avea expresia:
Urmare a calculului derivatelor partiale ale energiei cinetice functie de coordonatele robot de ordinul unu si doi, obtinem:
In scopul determinarii lucrului mecanic virtual elementar vom scrie vectorii deplasarilor incrementale pentru fiecare grad de mobilitate, urmand apoi a efectua produsul scalar al vectorilor torsorului forta-moment cu vectorii deplasarilor incrementale liniare si unghiulare.
Vectorii deplasarilor liniare si unghiulare incrementale vor avea expresiile:
Vectorii torsorului forta-moment vor avea expresiile:
Lucrul mecanic virtual elementar se va calcula dupa formula:
![]()
Urmare a calculelor efectuate se va obtine:
![]()
In scopul determinarii fortelor generalizate vom calcula derivatele partiale ale lucrului mecanic virtual elementar fata de coordonatele generalizate q.
Fortele generalizate vor avea expresiile:
Modelul comportarii dinamice a structurii de tip pistol TRTR va fi:
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1852
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved