| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Prin calculul dinamic al mecanismului biela-manivela se urmareste determinarea marimii si caracterului variatiei sarcinilor care actioneaza asupra pieselor motorului. Cercetarile in detaliu sunt foarte complexe din cauza regimului variabil de functionare. De aceea se folosesc relatii simplificate, obtinute in ipoteza unei viteze unghiulare constante a arborelui cotit si la regim stabilizat.
Asupra mecanismului biela-manivela, actioneaza fortele date de presiunea gazelor din cilindru si fortele de inertie ale maselor mecanismului aflate in miscare. Fortele de frecare vor fi considerate neglijabile. Fortele de inertie sunt constituite din fortele de inertie ale maselor aflate in miscare alternativa de translatie (indice j) si forte de inertie ale maselor aflate in miscare de rotatie (indice r).
Pentru calculul organelor mecanismului biela-manivela, al sarcinilor in lagare, pentru cercetarea oscilatiilor de torsiune, etc., trebuie determinate valorile maxime, minime si medii ale acestor forte. De aceea marimile fortelor se vor determina pentru o serie de pozitii succesive ale mecanismului, functie de unghiul de rotatie al arborelui cotit.
Pentru determinarea fortelor din elementele mecanismului biela-manivela este recomandabil sa se inceapa cu determinarea fortelor care actioneaza dupa axa cilindrului , cercetand separat fortele de presiune a gazelor si fortele de inertie.
Forta data de presiunea gazelor pe piston se determina cu relatia:
![]() (4.1.)
(4.1.)
in care:
pg - presiunea de lucru sau suprapresiunea, in [N/m2];
pind - presiunea indicata in cilindru dupa diagrama indicata in [N/m2];
po - presiunea mediului ambiant(po=105[N/m2];
![]() - aria capului pistonului, in
[m2];
- aria capului pistonului, in
[m2];
D - diametrul pistonului, in [m].
Variatia presiunii indicate a gazelor din cilindru in functie de unghiul de rotatie a arborelui cotit s-a determinat la calculul termic, prin trasarea diagramei indicate desfasurate (cronomanogramei).
Forta de presiune a gazelor este indreptata dupa axa cilindrului si poate fi considerata in axa boltului de piston. Aceasta forta este considerata pozitiva cand este orientata spre axa arborelui cotit (pind > po) si negativa cand este orientata invers (pind < po).
Calculul valorilor fortei de presiune a gazelor se face tabelar (vezi tabelul 4.2.). Se construieste curba Fg = f(a) (vezi fig.4.3).
Fortele de inertie sunt produse de masele aflate in miscare accelerata si anume: piston asamblat (piston, bolt, segmenti, sigurantele boltului), biela si arbore cotit.
Fortele de inertie sunt indreptate in sens opus acceleratiei si sunt date de formula generala:
![]() (4.2.)
(4.2.)
unde: m - masa elementelor in miscare, in [kg];
a - acceleratia maselor, in [m/s2].
In functie de felul miscarii elementelor mecanismului motor distingem urmatoarele tipuri de forte de inertie:
a) Fortele de inertie produse de masele elementelor aflate in miscare de translatie (Fj);
b) Fortele de inertie produse de masele neechilibrate ale elementelor aflate in miscare de rotatie (Fr).
Aceste forte sunt produse de masele pistonului asamblat (piston, segmenti, bolt de biela si sigurantele acestuia) si o parte din masa bielei si sunt considerate concentrate in axa boltului.
Determinarea fortelor de inertie ale maselor aflate in miscare de translatie se face cu relatia:
![]() (4.3)
(4.3)
unde: mj - masele pieselor in miscare de translatie, in [kg];
ap- acceleratia pistonului, in [m/s2].
Masele aflate in miscare de translatie se determina cu relatia urmatoare:
![]() (4.4)
(4.4)
unde: mp - masa pistonului asamblat, in [kg];
m1b - masa bielei concentrata in axa boltului si care se considera ca executa miscare de translatie, in [kg].
Recomandari pentru alegerea maselor mp si m1b se fac in paragraful 4.1.2.3.
Fortele de inertie Fj se pot exprima, tinand seama de expresia acceleratiei pistonului pentru mecanismul biela-manivela axat (4.5.), respectiv dezaxat (4.6), adica:
![]() (4.5)
(4.5)
![]() (4.6)
(4.6)
Calculul valorilor fortelor Fj se face tabelar (vezi tab.4.2.) si se construieste curba Fj = f(a) (vezi fig.4.3).
Aceste forte sunt produse de o parte din masa bilei si masa neechilibrata a unui cot al arborelui cotit (masa manetonului si masele reduse ale celor doua brate).
Fortele de inertie ale maselor in miscare de rotatie se determina cu relatiile:
![]() forta centrifuga (4.7)
forta centrifuga (4.7)
![]() forta
tangentiala (4.8)
forta
tangentiala (4.8)
unde: mr - masa in miscare de rotatie, in [kg];
R - raza manivelei, in [m];
w - viteza unghiulara a arborelui.
In cazul vitezei unghiulare constante, dw / dt = 0, deci fortele tangentiale sunt nule.
In consecinta, fortele de inertie ale maselor in miscare de rotatie sunt fortele centrifuge ce actioneaza pe directia razei manivelei si raman constante ca marime.
Recomandari privind determinarea maselor in miscare de rotatie se prezinta in paragraful 4.1.2.3.
Pentru simplificarea calculelor, masele pieselor in miscare pot fi inlocuite cu mase reduse concentrate in articulaliile mecanismului biela-manivela.
Masa bielei este considerata ca fiind concentrata in cele doua axe in care este articulata, respectiv in axa ochiului bielei (m1b) si in axa capului bielei (m2b).
Componenta m1b a masei bilei se considera ca executa miscare de translatie si este luata in calculul fortei de inertie Fj. A doua componenta m2b se adauga maselor rotitoare ale mecanismului.
Pentru majoritatea motoarelor de autovehicule, repartizarea masei bielei pe cele doua componente este:
![]() (4.9)
(4.9)
![]()
sau, cu suficienta aproximatie:
![]() (4.10)
(4.10)
![]()
In aceste conditii, masa elementelor aflate in miscare de translatie alternativa se poate determina cu relatia:
![]() (4.11)
(4.11)
unde: mp - masa pistonului asamblat, in [kg];
mb - masa bielei , in [kg].
Masele rotitoare mr, sunt constituite din masa fusului maneton mm, masa bratului de manivela redusa la raza R a manivelei si componenta m2b a bielei, adica:
![]()
Masa bratelor manivelei avand centrul de masa la raza r fata de axa arborelui cotit, se poate reduce la raza R a manivelei pornind de la egalitatea:
![]() ,
,
de unde se obtine:
![]() (4.12)
(4.12)
unde r reprezinta distanta de la axa arborelui cotit la centrul de greutate al bratului.
In cazul existentei unor contragreutati pe bratele manivelei, trebuie sa se tina seama de masa acestora reducand-o la raza R si scazand-o din masa bratelor manivelei.
Din tabelul 4.1. se pot determina orientativ masele pistonului si bielei si masele neechilibrate ale arborelui cotit fara contragreutati. Raportarea acestor mase s-a facut la unitatea de suprafata a capului pistonului.
Tabelul 4.1.
|
Masa [kg/m2] |
||
|
Denumirea piesei |
mas D=60.100[mm] |
mac D=80.120[mm] |
|
Piston cu segmenti si bolt -din aliaj de aluminiu -din fonta |
80.150 150.250 |
150.300 250.400 |
|
Biela |
100.150 |
250.400 |
|
Arbore cotit (mase neechilibrate) -turnat din fonta cu gauri de usurare -matritat din otel |
80.200 110.200 |
130.320 180.400 |
Observatie! Valorile mai mari se refera la alezaje mai mari.
Prin insumarea algebrica a fortelor de presiune a gazelor Fg si fortelor de inertie Fj, determinate pentru diferite pozitii ale manivelei, se obtin valorile fortei sumare care actioneaza in lungul axei cilindrului.
![]() (4.13)
(4.13)
|
Fig.4.1. Fig.4.2. Fortele care actioneaza Sensurile fortelor care in motorul monocilindric actioneaza in motor |
Calculul valorilor fortei F se face tabelar (vezi tabelul 4.2) si se construieste curba F=f(a) (fig.4.3).
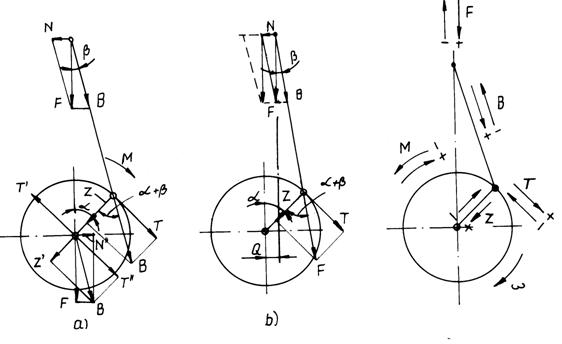
In figura 4.1. se prezinta schema de descompunere a fortelor sumare F, iar in fig.4.2. sensurile pozitive, respectiv negative ale fortelor.
|
Fig.4.3 Variatia fortelor Fg, Fj si F |
|
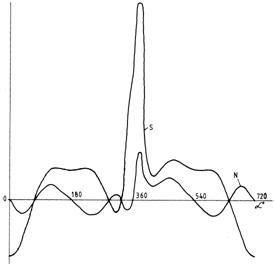
Fig. 4.4 Variatia fortelor N si B |
Forta F aplicata in axa boltului se descompune in doua componente, una de sprijin, normala pe axa cilindrului (N) si una dupa axa bielei (B):
![]() (4.14)
(4.14)
![]() (4.15)
(4.15)
Calculul fortelor N si B se face tabelar (vezi tabelul 4.2) si se reprezinta grafic curbele N=f(a) si B=f(a)(fig.4.4).
In axa fusului maneton, forta B se descompune in doua componente, una radiala (Z) si una tangentiala (T), expresiile lor fiind urmatoarele:
![]() (4.16)
(4.16)
![]() (4.17)
(4.17)
|
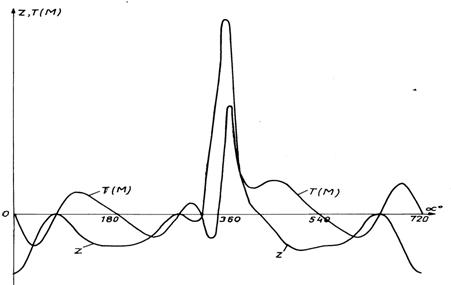
Fig. 4.5 Variatia fortelor T si Z |
Pe baza calculului tabelar al valorilor fortelor T si Z (vezi tab.4.2) se traseaza curbele T=f(a) si Z=f(a) (fig.4.5).
Forta tangentiala T este singura forta care produce momentul motor. Expresia momentului motor este:
![]() (4.18)
(4.18)
Raza manivelei R, in [m], fiind constanta, curba de variatie a momentului motor functie de unghiul de rotatie al manivelei este identica cu cea a fortei tangentiale T, evident la o scara adecvata (fig.4.5).
Momentul motor total se obtine prin insumarea momentelor obtinute pentru fiecare cilindru al motorului tinand cont de ordinea de functionare a acestora si de configuratia arborelui cotit. De asemenea, se poate obtine suma momentelor ce actioneaza asupra fiecarui fus palier al arborelui cotit.
Se stabileste variatia momentului motor total functie de unghiul a de rotatie a arborelui cotit, precum si valoarea momentului mediu. Cu valoarea momentului mediu se calculeaza puterea dezvoltata de motor care se compara cu puterea obtinuta la calculul termic.
Ca pozitie de pornire (a=0) se considera pozitia corespunzatoare p.m.s. a primului cilindru, aflat la admisie.
Pentru realizarea unei succesiuni optime de functionare a cilindrilor motorului si o echilibrare naturala cat mai completa a fortelor de inertie si momentelor acestora, trebuie stabilita o anumita pozitie relativa a manivelelor arborelui cotit.
Succesiunea optima de functionare a cilindrilor se stabileste din conditia distributiei uniforme a exploziilor succesive dintre doi cilindri vecini, pentru a nu rezulta sarcini medii prea mari pe fusurile paliere dintre acestia. Trebuie sa se aiba in vedere si circulatia incarcaturii proaspete in conducta de admisie, adica asigurarea unui numar minim de schimbari de directie a curentului in conducta de admisie si evitarea interceptarii incarcaturii destinate unui cilindru de catre un cilindru vecin cu canal de admisie mai scurt. Aceasta interceptare provoaca o crestere a neuniformitatii umplerii cilindrilor.
Tabelul 4.2
|
a |
p |
pg=p-1 |
Fg=A.pg |
ap |
Fj=-mj.ap |
SF |
b |
N |
S |
T |
Z |
M |
|
0RAC |
MPa |
MPa |
N |
m/s2 |
N |
N |
0 |
N |
N |
N |
N |
N |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
|
0 | ||||||||||||
|
10 | ||||||||||||
|
20 | ||||||||||||
|
30 | ||||||||||||
|
. | ||||||||||||
|
720 |
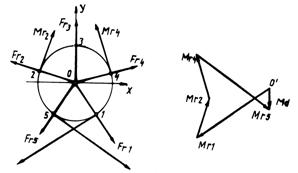
Pentru o echilibrare naturala cat mai completa a fortelor de inertie si a momentelor acestor forte trebuie cautate acele pozitii relative ale manivelelor arborelui cotit pentru care fortele cetrifuge si fortele de inertie de ordinul unu si doi se anuleaza reciproc. De asemenea, pentru echilibrarea momentelor date de fortele de inertie, trebuie ca manivelele sa fie dispuse 'in oglinda', adica manivelele egal departate de mijlocul arborelui cotit sa se afle in acelasi plan si orientate in acelasi sens.
|
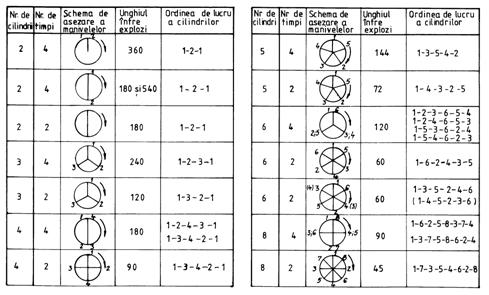
Tabelul 4.3 Schema de asezare a manivelelor si ordinea de lucru pentru motoarele cu cilindrii in linie
|
Tinand seama de cele prezentate mai sus, pentru un motor cu numar cunoscut de cilindri si timpi, se stabileste o anumita forma a arborelui cotit si o ordine de lucru optima a cilindrilor motorului.
In tabelele 4.3 si 4.4 sunt indicate pozitiile manivelelor si ordinea de lucru pentru diferite motoare cu ciclindri in linie, respectiv cu cilindri in V.
|
Tabelul 4.4 Schema de asezare a manivelelor si ordinea de lucru pentru motoarele cu cilindrii in V
|
In timpul unui ciclu, cilindrii motorului parcurg in mod diferit fazele ciclului motor, in functie de ordinea de lucru aleasa si de geometria arborelui cotit.
Pentru calculele ulterioare este necesara atat determinarea momentului motor total cat si a momentelor de torsiune care solicita fiecare fus palier in parte.
Tinand cont de cele expuse mai sus, momentul motor policilindric este alcatuit din doua componente:
- o componenta creata de forta tangentiala care actioneaza asupra cotului corespunzator cilindrului dat si care depinde numai de unghiul de rotatie al arborelui cotit;
|
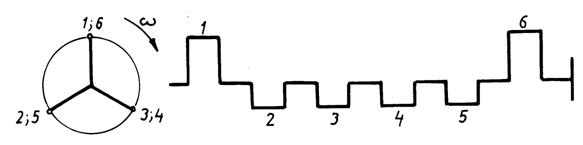
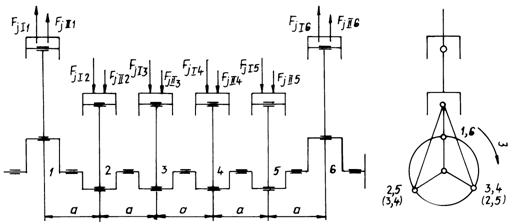
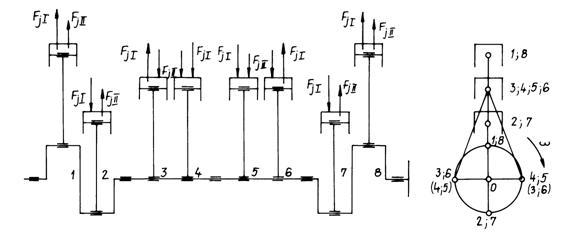
Fig.4.6. Schema arborelui cotit pentru motorul cu 6 cilindri in linie, in 4 timpi |
- o componenta data de momentul sumar al fortelor care actioneaza in cilindrii anteriori cotului respectiv si depinde de numarul de cilindri si de ordinea lor de lucru.
Calculul momentului total se exemplifica pe un motor cu 6 cilindri in linie, in 4 timpi.
In figura 4.6. se prezinta schema arborelui cotit.
Se alege ordinea de lucru a motorului 1-5-3-6-2-4-1 (vezi tab.4.3).
Unghiul de decalaj intre doua aprinderi succesive este dat de relatia:
![]() (4.19)
(4.19)
unde i este numarul de cilindri ai motorului.
|
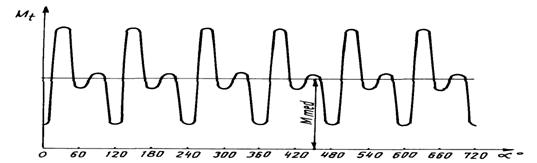
Fig.4.8. Variatia momentului cuplului motor Mt al unui motor cu 6 cilindri in linie |
Se construieste schema de lucru a motorului (fig. 4.7). Pe abscisa se noteaza unghiul de rotatie al arborelui cotit corespunzator primului cilindru. Pe ordonata se construiesc 6 intervale corespunzatoare numarului de cilindri. In intervalul corespunzator primului cilindru se construieste schema de lucru a acestuia. In continuare se completeaza schemele de lucru ale celorlalti cilindri, decalate cu cate 1200(unghiul dintre doua aprinderi succesive), decalarea efectuandu-se in ordinea de lucru a cilindrilor. Deci, dupa 1200 incepe schema de lucru a cilindrului 5, dupa alte 1200 a cilindrului 3. Procedand in continuare se completeaza intreaga diagrama.
Se observa ca atunci, cand primul cilindru incepe procesul de admisie, cilindrul 2 mai are de efectuat 2/3 din compresie, cilindrul 3 a efectuat 2/3 din destindere etc.
Pe baza acestei observatii se completeaza tabelul 4.5. Astfel in coloana 4, prima valoare corespunde celei din coloana 2 din momentul cand s-a terminat 1/3 din procesul de compresie (M240),apoi prin permutari circulare se completeaza intreaga coloana. Similar se completeaza valorile pentru coloanele 6,8,10 si 12.
In tabel este dat un exemplu de completare pentru cateva pozitii.
|
Unghiul de inceput al ciclului |
Schema de lucru a cilindrilor motorului |
Cilindrul |
|||||||||||
|
a0 |
A |
C |
D |
E |
1 |
||||||||
|
a240 |
C |
D |
E |
A |
C |
2 |
|||||||
|
a480 |
D |
E |
A |
C |
D |
3 |
|||||||
|
a120 |
A |
C |
D |
E |
A |
4 |
|||||||
|
a600 |
E |
A |
C |
D |
E |
5 |
|||||||
|
a360 |
D |
E |
A |
C |
6 |
||||||||
|
00 |
1800 |
3600 |
5100 |
7200 | |||||||||
Fig.4.7.Schema de lucru a cilindrilor motorului cu 6 cilindri in linie, in 4 timpi
Momentul pe fusul palier este dat de suma momentelor cilindrilor precedenti. Astfel coloana 3, corespunzatoare momentului de torsiune ce solicita palierul 1-2 (dintre cilindrii 1 si 2) este identica cu coloana 2, pentru ca avem un singur cilindru anterior palierului considerat. Coloana 5, corespunzatoare palierului 2-3 se completeaza insumand algebric pe orizontala valorile corespunzatoare din coloanele 3 si 4. Similar coloana 7 se completeaza insumand valorile corespunzatoare coloanelor 5 si 6 s.a.m.d.
Se va tine cont la insumare de semnul momentelor. In coloana 13 se va obtine momentul total al motorului.
Se constata ca momentul total apare ca o functie periodica cu perioada:
![]() (4.20)
(4.20)
unde i - numarul de cilindri;
t - numarul timpilor motorului.
In exemplul de fata momentul total are perioada de 120o.
Pe baza calculului tabelar se traseaza curba Mt=M1-6=f(a) (vezi fig.4.8).
Se determina valoarea medie a momentului motor, ca medie aritmetica a valorilor instantanee ale momentului motor (tab.4.5, coloana 13):
 (4.21)
(4.21)
Cu ajutorul momentului mediu se calculeaza puterea indicata a motorului:
![]() (4.22)
(4.22)
Puterea indicata calculata cu ajutorul relatiei 4.22 trebuie sa fie egala cu puterea indicata obtinuta la calculul termic dupa formula:
![]() (4.23)
(4.23)
unde: pi - presiunea medie indicata, in [N/m2];
Vt - cilindreea motorului, in [m3];
n - turatia motorului, in [rot/min].
Se admite o abatere de + 5%.
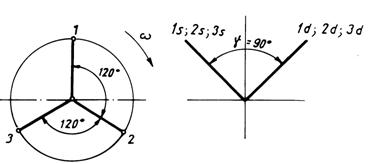
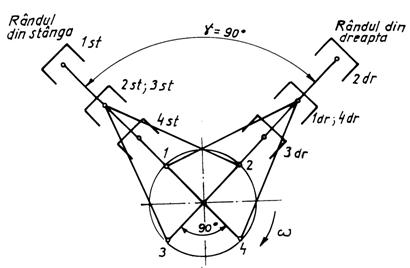
Pentru exemplificare se va examina un motor cu biele alaturate cu 6 cilindrii in V la 900
Schema amplasarii cilindrilor si a manivelelor arborelui cotit se prezinta in fig.4.9.
Din tabelul 4.4 se alege ordinea de lucru a motorului, adica 1s-1d-2s-2d-3s-3d.
Unghiurile dintre doua aprinderi succesive vor fi 90-150-90 etc.
|
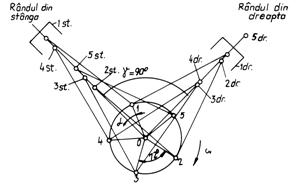
Fig.4.9. Schema de asezare a cilindrilor si manivelelor arboreului cotit pentru un motor cu 6 cilindri in V |
Se construieste schema de lucru a motorului (fig.4.10) in mod similar cu cea a motoarelor in linie (vezi 4.2.2.1.)
Tabel 4.5
|
a |
M |
SM Pal 1-2 |
M |
SM Pal 2-3 |
M |
SM Pal 3-4 |
M |
SM Pal 3-4 |
M |
SM Pal 4-5 |
M |
SM Pal 5-6 |
|
M |
M |
M |
SM +M240 |
M |
SM +M480 |
M |
SM +M120 |
M |
SM +M600 |
M |
SM +M360 |
|
|
M |
M |
M |
SM +M250 |
M |
SM +M490 |
M |
SM +M130 |
M |
SM +M610 |
M |
SM +M370 |
|
|
M |
M |
M |
SM +M350 |
M |
SM +M590 |
M |
SM +M230 |
M |
SM +M710 |
M |
SM +M470 |
|
|
M |
M |
M |
SM +M360 |
M |
SM +M600 |
M |
SM +M240 |
M |
SM +M720 |
M |
SM +M480 |
|
|
M |
M |
M |
SM +M470 |
M |
SM +M710 |
M |
SM +M350 |
M |
SM +M110 |
M |
SM +M590 |
|
|
M |
M |
M |
SM +M480 |
M |
SM +M720 |
M |
SM +M360 |
M |
SM +M120 |
M |
SM +M600 |
|
|
M |
M |
M |
SM +M240 |
M |
SM +M480 |
M |
SM +M120 |
M |
SM +M600 |
M |
SM +M360 |
Se observa ca atunci cand cilindrul 1s incepe procesul de admisie, cilindrul 1d mai are de efectuat 1/2 din evacuare, cilindrul 2s a efectuat 2/3 din destindere, cilindrul 2d a efectuat 1/5 din destindere s.a.m.d.
Pe baza acestei observatii se completeaza tabelul 4.6. Astfel, in coloana 3, prima valoare corespunde celei din coloana 2 din momentul cand s-a terminat 1/2 din evacuare (M630), apoi prin permutari circulare se completeaza intreaga coloana. Similar se completeaza coloanele 5,6,8 si 9.
In tabelul 4.6 este dat un model de completare pentru cateva pozitii. Momentul pe fusul palier este dat de suma momentelor cilindrilor precedenti. Astfel, coloana 4 corespunde momentului MI care solicita la torsiune palierul 1-2 (dintre cilindrii 1 si 2). Ea se completeaza insumand algebric, pe orizontala, valorile corespunzatoare coloanelor 2 si 3.
Coloanele 7 si 10 se completeaza insumand valorile corespunzatoare coloanelor 4,5 si 6, respectiv 7, 8 si 9. Se va tine cont la insumare de semnul momentelor. In coloana 10, corespunzatoare ultimului fus palier, se va obtine momentul total al motorului.
|
Unghiul de inceput al ciclului |
Schema de lucru a cilindrilor motorului |
Cilindrul |
|||||||||||||||||||||||
|
a0 |
A |
C |
D |
E |
1s |
||||||||||||||||||||
|
a480 |
D |
E |
A |
C |
D |
2s |
|||||||||||||||||||
|
a240 |
C |
D |
E |
A |
C |
3s |
|||||||||||||||||||
|
a630 |
E |
A |
C |
D |
E |
1d |
|||||||||||||||||||
|
a390 |
D |
E |
A |
C |
D |
2d |
|||||||||||||||||||
|
a150 |
A |
C |
D |
E |
A |
3d |
|||||||||||||||||||
|
00 |
1800 |
3600 |
5100 |
7200 | |||||||||||||||||||||
Fig.4.10 Schema de lucru a cilindrilor motorului cu 6 cilindri in V la 90 in 4 timpi
Se constata ca momentul total apare ca o functie periodica cu perioada:
![]() (4.25)
(4.25)
unde: t - numarul timpilor motorului;
i - numarul grupelor de cilindri (fusuri manetoane).
In exemplul de fata momentul total trebuie sa se repete dupa fiecare
![]()
Pe baza calculului tabelar se traseaza curba Mt=f(a)
Se calculeaza valoarea momentului mediu si se verifica puterea indicata ca si la motoarele cu cilindrii in linie (vezi 4.2.2.1.).
Tabelul 4.6
|
a0 |
M1s |
M1d |
MI Pal 1-2 |
M2s |
M2d |
MII Pal 2-3 |
M3s |
M3d |
MIII Pal 3-4 |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
0 |
M0 |
M630 |
M0+M630 |
M480 |
M390 |
MI+M480+M390 |
M240 |
M150 |
MII+M240+M150 |
|
10 |
M10 |
M640 |
M10+M640 |
M490 |
M400 |
MI+M490+M400 |
M250 |
M160 |
MII+M250+M160 |
|
. | |||||||||
|
120 |
M120 |
M30 |
M120+M30 |
M600 |
M510 |
MI+M600+M510 |
M360 |
M270 |
MII+M360+M270 |
|
130 |
M130 |
M40 |
M130+M40 |
M610 |
M520 |
MI+M610+M520 |
M370 |
M280 |
MII+M370+M280 |
|
. | |||||||||
|
300 |
M300 |
M210 |
M300+M210 |
M60 |
M690 |
MI+M60+M690 |
M540 |
M450 |
MII+M540+M450 |
|
310 |
M310 |
M220 |
M310+M220 |
M70 |
M700 |
MI+M70+M700 |
M550 |
M460 |
MII+M550+M460 |
|
. | |||||||||
|
720 |
M720 |
M630 |
M720+M630 |
M480 |
M390 |
MI+M480+M390 |
M240 |
M150 |
MII+M240+M150 |
Determinarea fortelor care actioneaza asupra fusurilor arborelui cotit este necesara pentru dimensionarea corecta a fusurilor si lagarelor, in scopul de a evita incalzirea lagarelor si a se asigura pelicula de ulei necesara ungerii acestora.
Se determina sarcina totala care actioneaza asupra fusurilor si lagarelor arborelui cotit, luandu-se in considerare toate fortele care le solicita, respectiv forta de presiune a gazelor si fortele de inertie.
Forta rezultanta ce actioneaza asupra fusului, respectiv lagarului arborelui cotit se determina prin metoda diagramei polare.
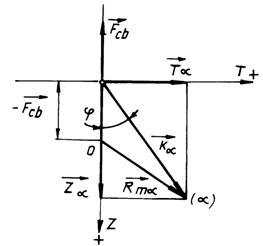
Asupra fusului maneton actioneaza forta tangentiala T, forta radiala Z si forta centrifuga de inertie Fcb a masei m2b a bielei aflata in miscare de rotatie.
Prin urmare, forta rezultanta care actioneaza asupra fusului maneton va fi:
![]() (4.26)
(4.26)
unde: ![]()
Forta
rezultanta ![]() se determina grafic
insumand vectorial toate fortele amintite (fig.4.11)
se determina grafic
insumand vectorial toate fortele amintite (fig.4.11)
Se considera un sistem de axe Z-T care se roteste impreuna cu arborele cotit. Se admite ca sens pozitiv pentru fortele T- sensul de rotatie al arborelui cotit, iar pentru fortele Z- sensul de la fusul maneton spre axa de rotatie a arborelui.
Se
aseaza la scara, fortele ![]() si
si ![]() corespunzatoare unui
unghi de rotatie oarecare a, cu originea in punctul O tinand
cont de semnele lor. Din compunerea acestor forte se obtine vectorul
rezultant
corespunzatoare unui
unghi de rotatie oarecare a, cu originea in punctul O tinand
cont de semnele lor. Din compunerea acestor forte se obtine vectorul
rezultant ![]() (fig.4.11.). Rezultanta
(fig.4.11.). Rezultanta ![]() se obtine insumand
vectorial fortele
se obtine insumand
vectorial fortele ![]() si
si ![]() adica:
adica:
![]() (4.27)
(4.27)
sau
![]() (4.28)
(4.28)
|
Fig.4.11.Constructia diagramei polare a fusului maneton |
|
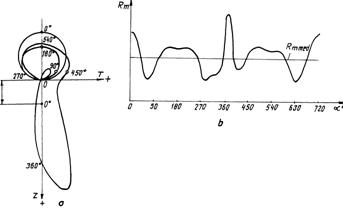
Fig.4.12. Diagrama polara (a) si desfasurata (b) a fortei rezultante Rm pe fusul maneton |
Determinand
pentru toate valorile unghiului a vectorii si unind printr-o curba
continua varfurile lor, se obtine diagrama polara a fusului
maneton cu polul in punctul O', corespunzator varfului vectorului ![]() .
.
De
remarcat ca vectorul ![]() este constant in marime
si sens in raport cu sistemul Z-T,
deci punctul O' este fix in raport cu acelati sistem.
este constant in marime
si sens in raport cu sistemul Z-T,
deci punctul O' este fix in raport cu acelati sistem.
Marimea si sensul fortei rezultante ce actioneaza asupra fusului maneton pot fi determinate cu relatiile de mai jos (vezi fig.4.11).
![]() (4.29)
(4.29)
![]() (4.30)
(4.30)
sau
![]() (4.31)
(4.31)
Unghiul a se masoara in sens trigonometric de la semiaxa pozitiva a fortelor Z.
Prin desfasurarea diagramei vectoriale in functie de unghiul a (fig.4.12), se obtine curba Rm=f(a), cu ajutorul careia se determina valorile maxima si medie a fortelor rezultante pe fusul maneton:
 (4.32)
(4.32)
|
Fig.4.13 Constructia diagramei de uzura a fusului maneton |
|
Fig.4.14. Diagrama de uzura a fusului maneton |
unde Rmx este valoarea rezultantei corespunzatoare fiecarei diviziuni unghiulare, iar k-numarul de diviziuni ale curbei Rm=f(a).
Cu ajutorul valorilor Rmmax si Rmmed se determina incarcarea specifica maxima si medie a fusului maneton.
![]() (4.33)
(4.33)
![]()
unde: dm - diametrul fusului maneton, in [mm];
lcb - lungimea cuzinetului de biela, in [mm].
Marimea pmed caracterizeaza incarcarea cuzinetului, uzura si lucrul mecanic de frecare; pmed nu trebuie sa depaseasca valoarea de 6 [N/mm2]. Raportul pmax/pmed caracterizeaza gradul de soc al incarcarii lagarului si este cuprins intre limitele 2.3.
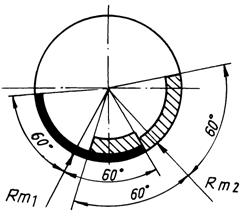
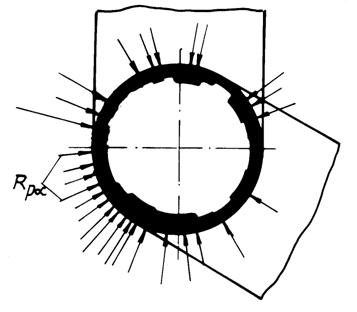
Pe baza diagramei polare se construieste diagrama de uzura. La baza constructiei acestei diagrame stau urmatoarele ipoteze:
- uzura este proportionala cu rezultanta care actioneaza asupra fusului maneton;
.- fortele care solicita la un moment dat fusul se distribuie pe suprafata lui la 60o, de ambele parti ale punctului de aplicatie.
Modul de construire a diagramei de uzura este prezentat in fig.4.13. Se traseaza un cerc care reprezinta sectiunea fusului. Se construiesc radial vectori proportionali cu marimea fortelor rezultante din diagrama polara. Extremitatile vectorilor se sprijina pe conturul cercului. Pe rand, de la directia fiecarei forte la 600 in ambele parti, se duc in interiorul cercului fasii circulare, a caror inaltime este proportionala cu marimea fortei.
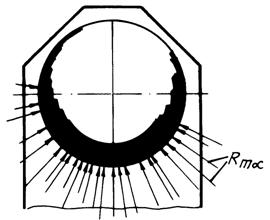
Suprafata acumulata dupa construirea tuturor fasiilor pentru un ciclu motor reprezinta diagrama de uzura. In fig.4.14 este prezentata o astfel de diagrama.
Diagrama de uzura indica zona presiunilor cele mai reduse de pe fus si, deci locul unde trebuie prevazuta gaura de ungere.
Diagramele polare se construiesc pentru toate fusurile paliere care sunt cuprinse intre coturi asezate sub unghiuri diferite. In cele mai multe cazuri, la motoarele rapide, fusul palier cuprins intre coturi decalate la 3600 este cel mai incarcat.
Forta care actioneaza asupra fusului palier al arborelui cotit care are un numar de lagare mai mare cu unu decat numarul de manetoane este determinata de fortele care actioneaza in bratele manetoanelor vecine fusului considerat.
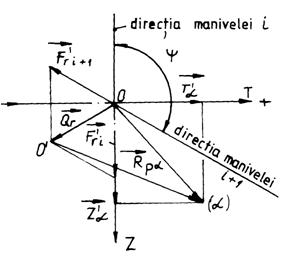
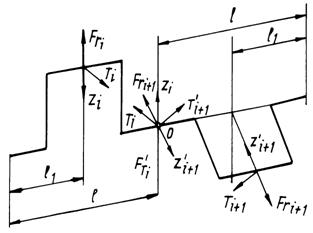
In fig. 4.15 este prezentat cazul general al unui fus palier care se afla cuprins intre coturile i si i+1, decalate sub un unghi y. In fiecare cot apar fortele Zi, Ti, Fri si respectiv, Zi+1, Ti+1, Fri+1. Fortele Fr sunt forte centrifuge provocate de masa neechilibrata a cotului respectiv si masa bielei aflata in miscare de rotatie (mr=mc+m2b).
Marimile reactiunilor datorate fortelor din cilindru i, respectiv i+1 corespunzatoare palierului dintre cei doi cilindri mentionati, se determina cu relatiile:
 (4.34)
(4.34)
Compunerea reactiunilor se realizeaza geometric tinandu-se seama de unghiul y dintre manivelele invecinate. Se considera un sistem de coordonate Z-T astfel incat axa Z sa coincida cu axa Z a cilindrului i, iar axa T sa fie perpendiculara pe aceasta. Ca si in cazul fusului maneton, sistemul de coordonate se roteste simultan cu arborele, in functie de unghiul a.
Fortele care actioneaza in manetoanele invecinate palierului considerat, respectiv Zi, Ti, Zi+1, si Ti+1 se pot determina din diagrama fortelor sumare, socotind defazarea unghiulara a ordinii de functionare a cilindrilor invecinati cu lagarul palier respectiv.
|
Fig.4.16. Constructia diagramei polare a fusului palier |
|
Fig.4.15 Determinarea reactiunilor dintr-un fus palier |
In concordanta cu cele prezentate mai sus, proiectiile pe directiile Z si T (fara efectul fortelor F'ri si F'ri+1) vor fi:
![]() (4.35)
(4.35)
In cazul palierelor simetrice (l1=l/2), relatiile 4.35 devin:
 (4.36)
(4.36)
Pentru construirea diagramei polare este necesar sa se determine proiectiile Z' si T' pentru toate valorile unghiului a . Acest lucru se obtine mai usor prin calcul tabelar. In sistemul de coordonate Z-T se aseaza pentru fiecare pozitie a arborelui cotit (definita de unghiul a),reactiunile Z' si T', respectand regula semnelor (fig.4.16.).
Unind
toate extremitatile vectorilor ![]() printr-o linie continua,
se obtine curba care reprezinta diagrama vectoriala a
fortelor care actioneaza pe fusul palier, fara a
tine seama de fortele centrifuge ale maselor in miscare de rotatie
(Fri si Fri+1). Influenta
acestor forte va fi luata in considerare, ca si in cazul fusului
maneton prin fixarea polului diagramei in punctul O', care reprezinta
extremitatea vectorului
printr-o linie continua,
se obtine curba care reprezinta diagrama vectoriala a
fortelor care actioneaza pe fusul palier, fara a
tine seama de fortele centrifuge ale maselor in miscare de rotatie
(Fri si Fri+1). Influenta
acestor forte va fi luata in considerare, ca si in cazul fusului
maneton prin fixarea polului diagramei in punctul O', care reprezinta
extremitatea vectorului ![]() .
.
Distanta
de la polul diagramei O' pana la varful vectorului ![]() reprezinta valoarea
rezultantei fortelor care actioneaza pe fusul palier
reprezinta valoarea
rezultantei fortelor care actioneaza pe fusul palier ![]() .
.
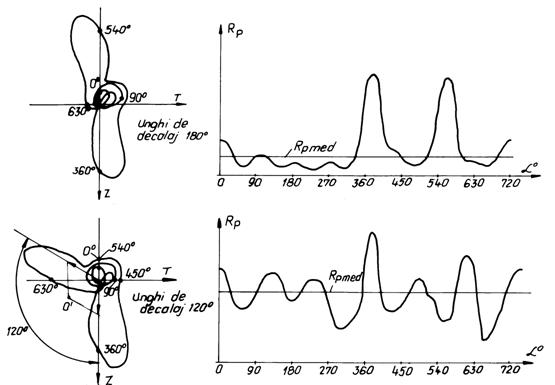
Prin
desfasurarea diagramei vectoriale in functie de a
(fig.4.17) se obtine curba ![]() cu ajutorul careia se
determina valorile maxima si medie a fortelor rezultante Rp:
cu ajutorul careia se
determina valorile maxima si medie a fortelor rezultante Rp:
![]() (4.37)
(4.37)
unde Rpx este valoarea rezultantelor corespunzatoare fiecarei diviziuni unghiulare;
k
- numarul de diviziuni ale curbei ![]() .
.
|
Fig.4.17 Diagrame polare si desfasurate ale fortei rezultante Rp pe fusul palier |
Cu ajutorul valorilor Rmmax si Rmmed se determina incarcarea specifica maxima si medie a fusului palier:
![]() (4.38)
(4.38)
![]()
unde: dp - diametrul fusului palier, in [mm];
lcp - lungimea cuzinetului fusului palier, in [mm].
Valoarea lui pmed nu trebuie sa depaseasca 6 [N/mm2].
Raportul pmax/pmed caracterizeaza gradul de soc al incarcarii lagarului si nu trebuie sa fie mai mare de 2.
In fig.4.17 sunt prezentate diagramele polare si desfasurate pentru diferite cazuri de decalaj al coturilor.
De multe ori, in cazul unui unghi de decalaj de 3600, pmed ia valori excesiv de mari, aceasta datorita fortelor de inertie mari provocate de masele in miscare de rotatie.
Utilizand contragreutati, fusul poate fi descarcat total sau partial de fortele de inertie ale maselor in miscare de rotatie. Aceasta corespunde unei deplasari a polului diagramei din O' spre O si, deci, conduce la micsorarea rezultantelor Rp. Daca marimea necesara deplasarii polului pentru a obtine o incarcare medie satisfacatoare este h, atunci masa contragreutatilor se poate determina din relatia de mai jos:
![]() (4.39)
(4.39)
unde: F - forta de inertie a doua contragreutati, in [N];
m - masa a doua contragreutati, in kg;
r - distanta de la centrul de greutate al contragreutatilor pana la axa de rotatie a arborelui, in mm;
w - viteza unghiulara a arborelui cotit;
h - marimea deplasarii dorite, in [mm];
m - scara diagramei, in [N/mm].
Pe baza diagramelor polare si desfasurate se construiesc diagramele de uzura ale fusurilor paliere. Metodica este asemanatoare cu cea prezentat_ la fusul maneton (vezi 4.3.1.). In fig.4.18. se prezinta diagrama de uzura pentru un fus palier.
Pentru fusul maneton se intocmeste diagrama polara pentru o singura biela, corespunzatoare fortelor provenite de la un singur cilindru, in mod asemanator motoarelor cu cilindrii in linie.
Metodica si relatiile de calcul sunt identice cu cele de la motoarele cu cilindrii in linie cu diferenta ca cilindrii i si i+1 se refera la un grup de 2 cilindrii care functioneaza cu un decalaj.
Un motor care functioneaza in regim stabilizat este considerat echilibrat daca fortele si momentele ce se transmit la punctele de sprijin ale motorului sunt invariabile ca marime, directie si sens.
In cazul motoarelor neechilibrate, fortele si momentele ce se transmit reazemelor se modifica permanent ca marime si sens si produc, in anumite conditii, vibratii ale ramei, caroseriei sau altor parti ale autovehiculului. Aceste vibratii, pot deveni deosebit de periculoase in cazul suprapunerii frecventei de oscilatie a acestora cu frecventele fortelor si momentelor neechilibrate transmise de la motor la punctele sale de sprijin.
Cauzele neechilibrarii motorului sunt variatiile periodice ale fortelor de inertie si ale momentelor lor, precum si neuniformitatea momentului motor.
Practic, echilibrarea motorului se realizeaza pe calea alegerii corespunzatoare a numarului si dispunerii cilindrilor, dispunerea manivelelor si alegerea contragreutatilor corespunzatoare.
|
Fig.4.18. Diagrama de uzura a unui fus palier |
Pentru simplificare, echilibrarea motorului se studiaza in urmatoarele ipoteze: cadrul motorului este perfect rigid; turatia motorului este constanta; se neglijeaza fortele de inertie din mecanismul de distributie, ele fiind sensibil mai mici decat cele din mecanismul motor, se neglijeaz_ fortele de frecare.
In cele ce urmeaza se va analiza echilibrarea principalelor motoare in linie si in V
miscare de translatie de ordin unu FjI si doi FjII (armonicele de ordin superior sunt neglijabile), fortele centrifuge Fr si momentele transmise la reazeme Mr.
![]() (4.40)
(4.40)
![]()
![]()
unde mj, mr - masa mecanismului biela-manivela aflata in miscare de translatie, respectiv rotatie;
R - raza manivelei;
w - viteza unghiulara a arborelui cotit;
a - unghiul de rotatie a arborelui cotit;
l - raportul dintre raza manivelei si lungimea bielei.
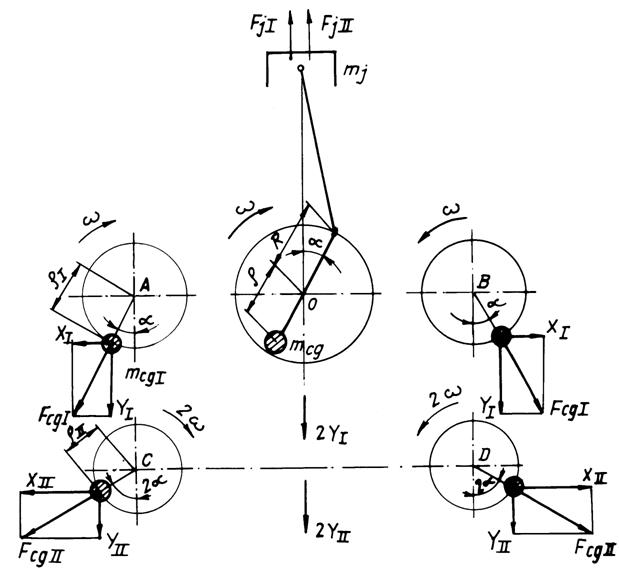
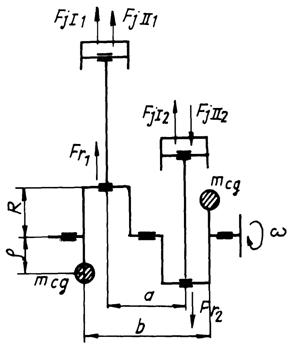
Fortele de inertie FjI si FjII pot fi echilibrate cu ajutorul unui sistem de contragreutati ca in fig.4.19.
Echilibrarea fortelor de inertie FjI se realizeaza cu ajutorul unor contragreutati de masa mcgI montate pe arborii A si B paraleli cu axa arborelui cotit si simetric dispusi fata de axa cilindrului. Arborii A si B se rotesc in sensuri diferite, cu aceeasi turatie cu a arborelui cotit. Contragreutatile se dispun in asa fel incat prin rotire, ele sa faca un unghi egal cu unghiul de rotatie a arborelui cotit si situate in partea opusa manevelei (vezi fig. 4.19).
Fiecare contragreutate de masa mcgI provoaca o forta data de relatia:
![]() (4.41)
(4.41)
Prin descompunerea celor doua forte centrifuge, pe directie verticala si orizontala, se observa ca cele doua componente orizontale se echilibreaza (XIA=XIB), iar componentele verticale se insumeaza dand rezultanta:
![]() (4.42)
(4.42)
Rezultanta RI actioneaza dupa axa cilindrului, are sens contrar fortei FjI, forta pe care trebuie sa o echilibreze. Astfel, masa contragreutatilor rezulta:
![]() (4.43)
(4.43)
|
Fig. 4.19 Schema echilibrarii fortelor Fr,FjI si FjII la motorul monocilindric |
In mod similar se poate face echilibrarea fortelor FjII. Pe arborii C si D, contragreutatile mcgII se rotesc cu viteza unghiulara 2w, iar dispunerea contragreutatilor trebuie facuta in asa fel ca la un unghi a al manivelei arborelui cotit, contragreutatile sa faca un unghi egal cu 2a fata de verticala si sa fie situate in partea opusa manivelei (vezi fig.4.19).
Componentele verticale ale fortelor centrifuge vor da in acest caz componenta RII, egala si de sens contrar cu FjII data de expresia urmatoare:
![]() (4.42')
(4.42')
Masa contragreutatilor necesare pentru echilibrarea fortelor de inertie FjII rezulta din egalitatea expresiilor celor doua forte:
![]()
adica:
![]() (4.43')
(4.43')
Datorita complexitatii constructiei, echilibrarea cu arbori suplimentari nu se aplica la motoarele monocilindrice pentru autovehicule, ci doar la motoarele stationare destinate cercetarii experimentale.
Forta centrifuga Fr este constanta ca marime (pentru w = ct) si fixa ca directie in raport cu manivela arborelui cotit. In aceste conditii Fr poate fi complet echilibrata cu ajutorul a doua contragreutati de masa mcg situate pe ambele brate ale arborelui cotit (vezi fig.4.19). Masa necesara fiecarei contragreutati este data de relatia:
![]() (4.44)
(4.44)
Momentul reactiv Mr nu se echilibreaza si el se transmite ramei autovehiculului. Volantul motorului monocilindric va avea un moment de inertie mai mare pentru a asigura uniformitatea dorita pentru viteza unghiulara.
|
Fig. 4.20 Schema motorului cu 2 cilindri in linie cu manivelele dispuse la 180 |
|
Fig.4.21. Schema motorului cu 2 cilindri in linie cu manivelele dispuse la 3600 |
Se va analiza atat motorul cu cilindrii in linie, cat si in V.
O prima varianta analizata este cea la care manetoanele arborelui cotit sunt dispuse la 1800, ca in fig.4.20.
Forta de inertie FjI pentru primul cilindru este:
![]() (4.45)
(4.45)
Manetonul celui de-al doilea cilindru este dispus la 1800 fata de manetonul primului cilindru deci forta pentru al doilea cilindru este:
![]() (4.46)
(4.46)
Fortele de inertie de ordinul I sunt egale si de sens contrar, deci ele se echilibreaza.
Momentele fortelor de inertie de ordinul I nu se echilibreaza si el tinde sa rastoarne motorul in directie longitudinala. Momentul rezultant al fortelor FjI este dat de expresia:
![]() (4.47)
(4.47)
Momentul SMjI poate fi echilibrat cu doua contragreutati dispuse pe doi arbori suplimentari care sa se roteasca cu aceeasi viteza unghiulara ca si arborele cotit si care trebuie sa creeze un moment egal si de sens contrar cu SMjI.
Fortele de inertie de ordinul II pentru cei doi cilindri sunt:
![]() (4.48)
(4.48)
![]()
Se observa ca cele doua forte sunt egale si de acelasi sens, ceea ce inseamna ca ele nu se echilibreaza. Rezultanta lor este:
![]() (4.49)
(4.49)
Rezultanta fortelor de ordin I se poate echilibra cu contragreutati dispuse simetric pe arbori suplimentari care se rotesc in sensuri opuse si cu viteze unghiulare duble arborelui cotit.
Momentul fortelor de inertie de ordinul II este nul adica SMjII = 0.
Fortele de inertie ale maselor aflate in miscare de rotatie sunt egale si de sensuri contrare la cei doi cilindri, deci:
|
Fig.4.22 Schema motorului cu 2 cilindri in V la 90 |
![]() (4.50)
(4.50)
Momentul fortelor centrifuge nu se echilibreaza natural. Acest moment actioneaza in planul manetoanelor si are expresia:
![]() (4.51)
(4.51)
Acest moment poate fi echilibrat cu doua contragreutati dispuse pe bratele manetoanelor (fig.4.20). Momentul produs de fortele centrifuge ale contragreutatilor este:
![]() (4.52)
(4.52)
Momentul Mcg trebuie sa echilibreze momentul Mr (Mcg=Mr), de unde rezulta masa unei contragreutati :
![]() (4.53)
(4.53)
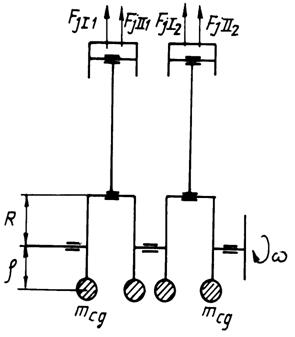
O alta varianta analizata este cea la care manivelele arborelui cotit sunt dispuse la 3600, ca in fig.4.21.
Rezultanta fortelor de inertie de ordin I este:
![]() (4.54)
(4.54)
Rezultanta fortelor de inertie de ordin II este:
![]() (4.55)
(4.55)
Aceste rezultante ale fortelor de inertie pot fi echilibrate cu contragreutati dispuse pe arbori suplimentari, prin metoda prezentata la motorul monocilindric.
Rezultanta fortelor centrifuge este data de relatia:
![]() (4.56)
(4.56)
Aceasta forta poate fi echilibrata cu ajutorul unor contragreutati de masa mcg (vezi fig.4.21):
![]() (4.57)
(4.57)
Se observa ca, datorita dispunerii simetrice a fortelor fata de mijlocul arborelui cotit, toate momentele se anuleaza, adica:
![]() (4.58)
(4.58)
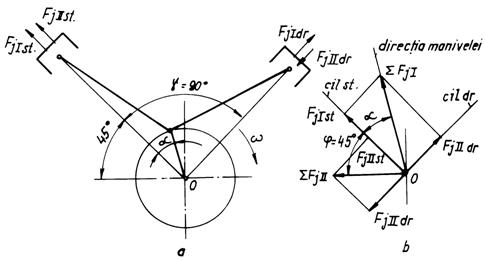
Schema motorului cu doi cilindri in V dispusi la 900, cu un singur maneton este prezentata in fig.4.22.
Pentru cilindrul din stanga, forta de inertie de ordinul I este:
![]() (4.59)
(4.59)
Pentru cilindrul din dreapta, relatia de calcul a fortei de inertie de ordinul I se scrie tinand cont de unghiul dintre manivelele celor doi cilindri:
![]() (4.60)
(4.60)
sau, tinand cont ca g = 90 in cazul de fata:
![]() (4.61)
(4.61)
Prin insumare geometrica se obtine rezultanta fortelor de inertie de ordin I, adica:
![]() (4.62)
(4.62)
Unghiul dintre directia rezultantei SFjI si axa cilindrului din stanga (forta FjIst) este egal cu unghiul a deoarece
 (4.63)
(4.63)
Prin urmare, forta rezultanta SFjI este constanta si orientata pe directia manivelei. Ea va fi echilibrata impreuna cu fortele de inertie ale maselor rotitoare.
Fortele de inertie de ordinul II vor fi:
![]() (4.64)
(4.64)
![]() (4.65)
(4.65)
Rezultanta acestor forte este data de relatia:
![]() (4.66)
(4.66)
Unghiul dintre aceasta forta si axa primului cilindru (forta FjIIst) este j = 450 deoarece:
 (4.67)
(4.67)
Prin urmare forta de inertie de ordinul II rezultanta este variabila ca marime si are directia orizontala. Ea poate fi echilibrata cu un sistem de contragreutati simetrice montate pe doi arbori ce se rotesc cu viteza unghiulara 2w, ca in cazul monocilindrului.
Fortele de inertie ale maselor aflate in miscare de rotatie pot fi echilibrate impreuna cu rezultanta fortelor de inertie de ordinul I, prin contragreutati dispuse pe bratele arborelui cotit:
![]() (4.68)
(4.68)
adica
![]() (4.69)
(4.69)
de unde
![]() (4.70)
(4.70)
|
Fig.4.23. Schema motorului cu 2 cilindri opusi |
Momentele fortelor de inertie sunt nule deoarece fortele de inertie sunt situate in acelasi plan, perpendicular pe axa arborelui cotit, deci:
![]() (4.71)
(4.71)
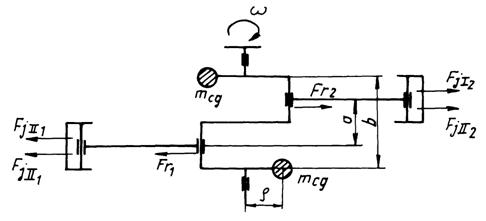
Schema motorului cu doi cilindri opusi este prezentata in fig.4.23. Manetoanele arborelui cotit sunt dispuse la 1800.
Atat fortele de inertie de ordinul unu si doi, cat si fortele centrifuge Fr din cilindru 2, sunt egale si de sensuri contrare celor din cilindrul 1, deci rezultantele lor vor fi nule:
![]() (4.72)
(4.72)
Momentele rezultante ale fortelor de inertie de ordinul unu si doi sunt date de relatiile
![]() (4.73)
(4.73)
![]() (4.74)
(4.74)
Momentele SMjI si SMjII pot fi echilibrate complet cu doua sisteme de contragreutati suplimentare dispuse simetric pe arbori care se rotesc in sensuri diferite cu viteza unghiulara a arborelui cotit, respectiv dubla acesteia (vezi si echilibrarea monocilindrului).
Momentul fortelor centrifuge este neechilibrat:
![]() (4.75)
(4.75)
Acest moment poate fi echilibrat cu doua contragreutati de masa mcg dispuse pe bratele arborelui cotit astfel incat mometul lor SMcg sa anuleze efectul momentului SMr, deci:
![]() (4.76)
(4.76)
si rezulta masa mcg:
![]() (4.77)
(4.77)
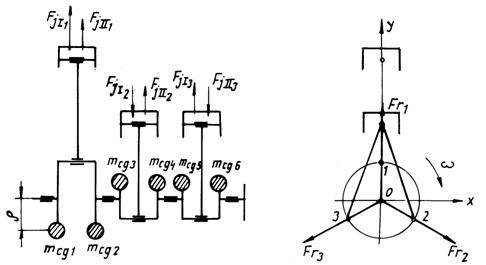
Schema motorului cu trei cilindri in linie este prezentata in figura 4.24. Arborele cotit are manivelele dispuse la 1200.
Fortele de inertie de ordin unu pentru cei trei cilindri sunt:
![]() (4.78)
(4.78)
![]()
![]()
Se verifica usor ca rezultanta lor este nula, adica:
![]() (4.79)
(4.79)
Fortele de inertie de ordin doi sunt:
![]() (4.80)
(4.80)
![]()
![]()
|
Fig.4.24. Schema motorului cu 3 cilindri in linie |
Rezultanta acestor forte este si ea nula:
![]() (4.81)
(4.81)
Fortele centrifuge sunt egale pentru toti cei trei cilindri si orientate dupa razele manivelelor:
![]() (4.82)
(4.82)
Aceste forte se echilibreaza natural deoarece componentele lor pe directia primei manivele, respectiv perpendiculara pe aceasta se anuleaza reciproc, adica:
![]() (4.83)
(4.83)
![]() (4.84)
(4.84)
Deci,
![]() (4.85)
(4.85)
Momentele fortelor centrifuge si de inertie de ordin unu si doi nu se anuleaza. Aceste momente tind sa rastoarne motorul in plan longitudinal, in jurul centrului sau de greutate.
Conform schemei 4.24, momentul fortelor centrifuge se poate determina cu relatia:
![]() (4.86)
(4.86)
Acest moment actioneaza intr-un plan situat la 300 fata de planul primei manivele.
|
Fig.4.25 Schema dispunerii contragreutatilor la motorul cu 3 cilindri |
Fortele de inertie de ordinul I si II actioneaza in planul axelor cilindrilor. Momentele lor vor fi date de urmatoarele relatii:
![]() (4.87)
(4.87)
respectiv,
![]() (4.88)
(4.88)
|
Fig.4.26 Schema motorului cu 4 cilindri in linie in 4 timpi |
Momentul fortelor centrifuge poate fi echilibrat prin 6 contragreutati dispuse pe bratele arborelui cotit, masa unei contragreutati fiind:
![]() (4.89)
(4.89)
Numarul contragreutatilor poate fi redus de la 6 la 4 (vezi fig.4.25). Contragreutatile mcg2 si mcg3, respectiv mcg4 si mcg5 (vezi si fig.4.24) pot fi inlocuite cu contragreutatile m2, respectiv m5 dispuse pe bisectoarea unghiului dintre cele doua brate vecine.
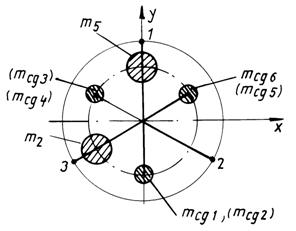
Motorul in 4 timpi cu 4 cilindri in linie are manivelele dispuse la 1800. Schema arborelui cotit este prezentata in fig.4.26.
Datorita dispunerii 'in oglinda' a manivelelor arborelui cotit, fortele de inertie de ordin unu pentru cilindrii 1 si 4 , respectiv 2 si 3 vor fi egale, adica:
![]() (4.90)
(4.90)
![]() (4.91)
(4.91)
Deci, rezultanta fortelor de inertie de ordin unu este nula:
![]() (4.92)
(4.92)
Datorita dispunerii simetrice a fortelor de inertie de ordin unu fata de mijlocul arborelui cotit, rezultanta momentului acestor forte este nula, adica:
![]() (4.93)
(4.93)
|
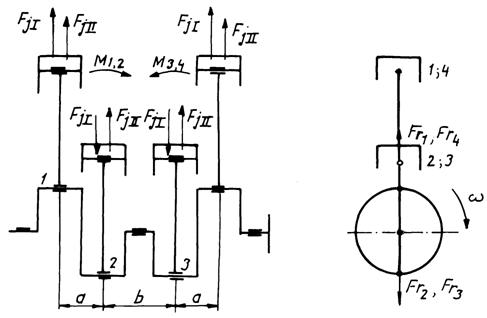
Fig.4.27 Schema motorului cu 4 cilindri in linie in 2 timpi |
Conform schemei din fig.4.26, fortele de inertie de ordin doi pentru cilindri egal departati de mijlocul arborelui cotit vor fi egale, adica:
![]() (4.94)
(4.94)
 (4.95)
(4.95)
Deci, fortele de inertie de ordin doi pentru toti cei patru cilindri sunt egale si, deci rezultanta lor este:
![]() (4.96)
(4.96)
Aceasta rezultanta poate fi echilibrata prin doua contragreutati dispuse pe arbori suplimentari care sa se roteasca in sensuri diferite, cu turatie dubla arborelui cotit, ca in cazul monocilindrului.
Datorita dispunerii simetrice a fortelor fata de mijlocul arborelui, momentul rezultant al fortelor de ordin doi se anuleaza:
![]() (4.97)
(4.97)
Fortele centrifuge Fr sunt egale la toate manivelele, avand la cilindrii 1 si 4 sensuri contrare fata de cilindrii 2 si 3. Prin urmare, rezultanta fortelor centrifuge este nula, respectiv:
![]() (4.98)
(4.98)
Datorita dispunerii 'in oglinda' a manivelelor arborelui cotit, momentul rezultant al fortelor centrifuge este nul, adica:
![]() (4.99)
(4.99)
Se pot utiliza contragreutati cu rol doar de a descarca lagarele paliere de fortele centrifuge ale fiecarui maneton sau de momentele acestora, mai ales in cazul motorului cu trei lagare de sprijin.
|
Fig. 4.28 |
|
Fig. 4.29 |
Acest motor are manivelele arborelui cotit dispuse la 900. Schema arborelui si sensurile fortelor sunt prezentate in fig.4.27.
Fortele de inertie de ordin unu pentru cei 4 cilindri vor fi:
 (4.100)
(4.100)
Se constata ca rezultanta fortelor de ordin unu se anuleaza, adica:
![]() (4.101)
(4.101)
Momentul rezultant al fortelor de inertie de ordin unu, calculat fata de mijlocul arborelui este:
![]() (4.102)
(4.102)
sau, dupa transformari:
![]() (4.103)
(4.103)
Momentul sumar al fortelor de inertie de ordin unu are valoarea maxima pentru amax. Valoarea amax se obtine prin anularea derivatei in raport cu a a momentului.
Se
obtine:![]() si
si ![]()
Prin urmare:
![]() (4.104)
(4.104)
Momentul rezultant al fortelor de inertie de ordin unu poate fi partial echilibrat printr-un sistem de contragreutati dispuse pe arbori suplimentari la unghiurile amax determinate mai inainte. In cazul motoarelor in doi timpi cu evacuarea prin supape, unul din arborii suplimentari il constituie arborele de distributie.
Fortele de inertie de ordin doi pentru cei patru cilindri vor fi:
 (4.105)
(4.105)
sau
![]() (4.106)
(4.106)
Prin urmare, rezultanta fortelor de inertie de ordin doi este nula, respectiv:
![]() (4.107)
(4.107)
Momentul rezultant al fortelor de inertie de ordin doi calculat fata de punctul A (vezi fig.4.27) este:
![]() (4.108)
(4.108)
Dupa
transformari rezulta:![]()
Rezultanta
fortelor centrifuge pentru toti cilindrii este nula (vezi
fig.4.27), adica: ![]()
Fortele centrifuge Fr1 si Fr4 actioneaza in acelasi plan si dau un moment:
![]() (4.109)
(4.109)
Fortele centrifuge Fr2 si Fr3 actioneaza in planul perpendicular pe primul si dau momentul:
![]() (4.110)
(4.110)
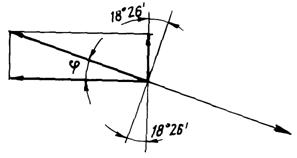
Momentul sumar al fortelor centrifuge se poate calcula dupa schema din fig.4.28.
![]() (4.111)
(4.111)
sau, dupa transformari succesive:
![]() (4.112)
(4.112)
Momentul rezultant al fortelor centrifuge actioneaza intr-un plan dispus la un unghi j = 18026' fata de prima manivela (fig.4.28):
![]() (4.113)
(4.113)
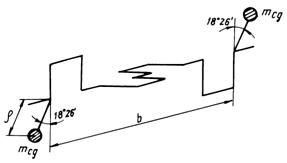
Acest moment poate fi echilibrat prin doua contragreutati dispuse pe capetele arborelui cotit, ca in fig.4.29.
Masa contragreutatilor se obtine din expresia urmatoare:
![]() (4.114)
(4.114)
sau, dupa transformari:
![]() (4.115)
(4.115)
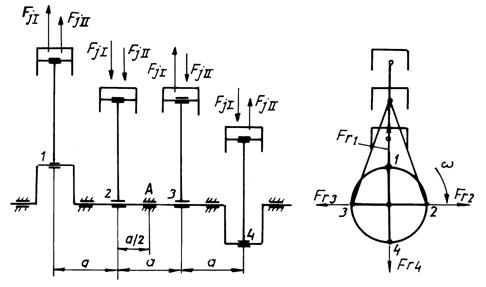
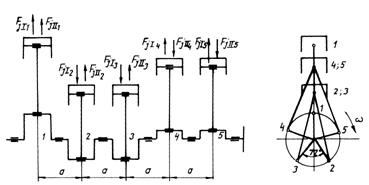
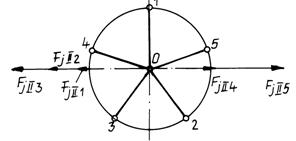
Schema motorului cu cinci cilindri in linie este prezentata in fig.4.30. Manivelele arborelui cotit sunt dispuse la 720.
Fortele de inertie de ordinul unu sunt date de relatiile:
 (4.116)
(4.116)
Rezultanta acestor forte este data de expresia:
![]() (4.117)
(4.117)
Dar,

Prin urmare, rezultanta fortelor de ordin unu este nula.
![]()
Fortele de inertie de ordin doi au expresiile:
|
Fig.4.30 Schema motorului cu 5 cilindri in linie |
 (4.118)
(4.118)
Rezultanta fortelor de inertie de ordin doi este:
![]() (4.119)
(4.119)
Dar,
![]()
Deci, rezultanta fortelor de ordin doi este nula:
![]()
Fortele centrifuge sunt constante ca marime, egale pentru toti cilindrii si sunt in faza cu manivelele indiferent de pozitia arborelui cotit.
![]() (4.120)
(4.120)
Aceste forte se echilibreaza natural deoarece componentele lor pe directia primei manivele, respectiv perpendiculara pe aceasta se anuleaza reciproc.
In planul primei manivele componenta rezultantei fortelor centrifuge este:
![]() (4.121)
(4.121)
sau:
![]() (4.122)
(4.122)
In planul perpendicular pe prima manivela se obtine:
![]() (4.123)
(4.123)
sau
![]() (4.124)
(4.124)
Prin urmare
![]()
Momentul rezultant al fortelor de inertie de ordin unu nu se echilibreaza. Intr-adevar, facand suma de momente fata de axa ultimului cilindru se obtine:
![]()
sau
![]() (4.125)
(4.125)
Pentru a = 0 se obtine:
![]() (4.126)
(4.126)
Momentul rezultant al fortelor de inertie de ordin doi nu se echilibreaza. Scriind momentul fortelor fata de axa cilindrului 5 rezulta:
![]()
sau
![]() (4.127)
(4.127)
Pentru a = 0 se obtine:
![]() (4.128)
(4.128)
Deci, momentele fortelor de inertie ale maselor aflate in miscare de translatie nu se echilibreaza.
Aceste momente pot fi echilibrate partial cu dispozitive mecanice cu mase de rotatie dispuse pe arbori suplimentari (vezi echilibrarea motorului monocilindric).
Atenuarea eforturilor produse de momentele externe se poate realiza si prin adoptarea unei ordini de aprindere convenabile, dictata de stelajul manivelelor.
Ordinea de aprindere 1-3-5-4-2-1 este cea mai convenabila.
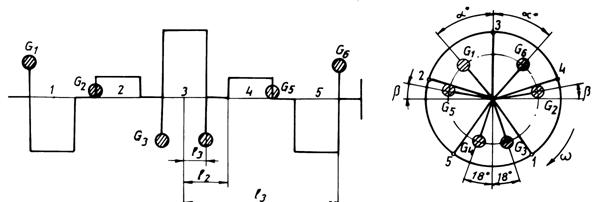
In continuare se analizeaza echilibrarea momentelor fortelor centrifuge. Momentele acestor forte nu se echilibreaza natural. Ele pot fi echilibrate cu contragreutati dispuse pe bratele arborelui cotit. Numarul contragreutatilor trebuie sa fie par pentru a se obtine o anumita simetrie fata de mijlocul arborelui cotit. Cea mai convenabila solutie foloseste 6 contragreutati, aceasta fiind cea mai tehnologica.
Pentru cilindrul din mijloc se vor folosi doua contragreutati dispuse la 180 fata de axa manivelei 3. Acest unghi determina aparitia unei rezultante mai mici intre fortele centrifuge ale contragreutatilor manivelei 3 si fortele centrifuge ale manivelelor din planele cele mai apropiate Fr1 si Fr5, respectiv fortele centrifuge ale manivelelor invecinate Fr2 si Fr4 (vezi fig.4.31)
Amplasarea celorlalte 4 contragreutati se face in asa fel incat sa fie satisfacuta conditia echilibrarii fortelor centrifuge dupa proiectiile in plan vertical si orizontal.
In plan orizontal, echilibrarea se realizeaza natural prin dispunerea simetrica a contragreutatilor.
In plan vertical, conform relatiei scrise pentru jumatate din contragreutati rezulta conditia (vezi fig.4.31):
![]() (4.129)
(4.129)
unde a - unghiul dintre G1, respectiv G6 si axa OY
b - unghiul dintre G2, repectiv G5 si axa OX.
Se
utilizeaza contragreutati cu mase egale, deci: ![]()
Prin urmare se obtine conditia de dispunere a contragreutatilor:
![]() (4.130)
(4.130)
Au fost analizate mai multe variante de perechi de unghiuri (a, b).

|
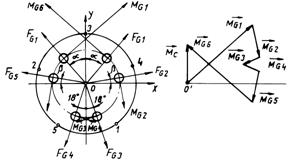
Fig.4.31 Dispunerea contragreutatilor la motorul cu 5 cilindri in linie |
In toate cazurile se urmareste obtinerea unor rezultante mici intre Fr si fortele centrifuge ale contragreutatilor Fcg vecine. De asemenea, se urmateste obtinerea unui moment compensator corespunzator (dat de contragreutati), avand in vedere si necesitatea realizarii unei rezerve de echilibrare dinamica pe masini de echilibrat.
Se adopta solutia A, cu a = 420 si b = 120, cea mai indicata din punctul de vedere al echilibrarii momentelor.
|
Fig.4.32. Determinarea momentului de dezechilibru Md al fortelor centrifuge |
Se calculeaza marimile momentelor fortelor centrifuge fata de mijlocul arborelui cotit (manivelei 3).
 (4.131)
(4.131)
unde a reprezinta distanta dintre doi cilindri alaturati.
Se adopta un sistem de referinta xOy cu axa Oy pe directia manivelei 3 si axa Ox perpendiculara pe aceasta. Se construieste poligonul momentelor fortelor centrifuge (fig.4.32), folosind expresiile vectoriale ale momentelor:
 (4.132)
(4.132)
unde ![]() si
si ![]() sunt versorii
directiilor Ox, respectiv Oy.
sunt versorii
directiilor Ox, respectiv Oy.
Se obtine momentul de dezechilibru prin insumarea vectoriala a momentelor fortelor centrifuge pentru toti cilindrii, adica
![]() (4.133)
(4.133)
sau
![]() (4.134)
(4.134)
Ca marime scalara momentul de dezechilibru are expresia:
![]() (4.135)
(4.135)
In continuare se determina momentul compensator dat de contragreutati.
Cele 6 contragreutati vor fi asezate la aceeasi raza si cu aceeasi masa.
Se determina marimile momentelor fortelor centrifuge date de contragreutati fata de mijlocul arborelui.
 (4.136)
(4.136)
unde s-au notat:
l1 - distanta de la contragreutatea G1, respectiv G6 la mijlocul arborelui cotit (vezi fig.4.31);
l2 - distanta de la contragreutatea G2, respectiv G5 la mijlocul arborelui cotit;
l3 - distanta de la contragreutatea G3, respectiv G4 la mijlocul arborelui cotit.
Se construieste poligonul momentelor fortelor centrifuge ale contragreutatilor (fig.4.32) folosind expresiile vectoriale ale momentelor:
 (4.137)
(4.137)
Prin
insumarea vectoriala a momentelor centrifuge date de cele 6
contragreutati se obtine momentul compensator ![]() , adica
, adica
![]() (4.138)
(4.138)
Ca marime scalara se obtine:
![]() (4.139)
(4.139)
Pentru echilibrarea momentelor fortelor centrifuge este necesara indeplinirea conditiei:
![]()
Cele doua momente rezultante au aceeasi directie (directia manivelei 3), sensuri opuse si deci rezulta relatia:
![]() (4.140)
(4.140)
Din relatia anterioara rezulta conditia de determinare a masei contragreutatilor si a rezei lor de dispunere:
![]() (4.141)
(4.141)
|
Fig.4.33. Determinarea momentului compensator Mc al fortelor de inertie ale contragreutatilor |
Practic, momentul compensator Mc trebuie sa fie mai mare decat momentul de dezechilibrare Md, fiind necesara o rezerva pentru echilibrarea dinamica a arborelui cotit.
|
Fig.4.34. Schema motorului cu 6 cilindri in linie,in 4 timpi |
Motorul cu sase cilindri in linie, in patru timpi are manetoanele dispuse la 1200, cum se arata in schema din figura 4.34.
Expresiile fortelor de inertie de ordinul I sunt urmatoarele:
 (4.142)
(4.142)
Rezultanta acestor forte este data de expresia:
![]() (4.143)
(4.143)
sau, dupa prelucrari succesive,
![]() (4.144)
(4.144)
Deci, rezultanta fortelor de inertie de ordin unu se anuleaza.
Pentru fortele de inertie de ordin doi se obtin expresiile:
 (4.145)
(4.145)
sau:
 (4.146)
(4.146)
Tinand cont ca:
![]()
se obtine ca rezultanta fortei de inertie de ordin II se anuleaza, adica:
![]() (4.147)
(4.147)
Datorita dispunerii 'in oglinda' a manetoanelor arborelui cotit si a simetriei fortelor de inertie (vezi fig.4.34) rezulta ca momentele sumare ale fortelor de inertie de ordinul I, respectiv II sunt nule, adica:

Considerand arborele cotit format din doi arbori cu trei manivele 'in oglinda' si repetand rationamentul de la paragraful 4.4.3., se demonstreaza ca fortele centrifuge se echilibreaza reciproc. Deci, rezultanta fortelor centrifuge este nula.
![]()
Momentul rezultant al acestor forte este de asemenea nul, manivelele arborelui fiind in oglinda, adica:
![]()
In concluzie, motorul cu sase cilindri in linie, cu manivelele dispuse la 1200 este complet echilibrat.
Utilizarea contragreutatilor pe bratele arborelui cotit se practica pentru descarcarea lagarelor paliere.
Arborele cotit al motorului are trei manivele, ca si al motorului cu trei cilindri in linie (fig.4.24).
Fortele de inertie ale maselor aflate in miscare de translatie actioneaza dupa axele cilindrilor. Deci, pentru cei trei cilindri din stanga, respectiv pentru cei din dreapta, analiza echilibrarii acestor forte va fi identica cu cea de la motorul cu trei cilindri.
Fortele de ordinul unui raportate la pozitia primului cilindru din stanga sunt:
 (4.148)
(4.148)
si, deci:
![]() (4.149)
(4.149)
Pe linia din dreapta:
 (4.150)
(4.150)
si deci:
![]() (4.151)
(4.151)
In mod analog se procedeaza cu fortele de ordinul doi. Pe linia din stanga se obtine:
 (4.152)
(4.152)
si deci:
![]() (4.153)
(4.153)
Pentru linia din dreapta:
si deci:
![]() (4.154)
(4.154)
Fortele centrifuge de la cele trei manivele se echilibreaza reciproc (vezi si echilibrarea motorului cu 3 cilindri in linie), adica:
![]()
Momentele fortelor de inertie nu se echilibreaza, iar rezultantele sunt date de expresiile:
![]() (4.155)
(4.155)
![]() (4.156)
(4.156)
![]() (4.157)
(4.157)
Cu a s-a notat distanta dintre axele cilindrilor vecini de pe acelasi rand.
Motorul cu sase cilindri in V de 900 are arborele cotit cu manivelele dispuse la 1200 ca la motorul cu trei cilindri.
Fortele de inertie ale maselor aflate in miscare de translatie se echilibreaza pe linii de cilindri (vezi echilibrarea motorului 6V 1200), pe linia din stanga, respectiv dreapta, rezultand:
 (4.158)
(4.158)
Pentru studiul echilibrarii fortelor centrifuge este convenabil sa se analizeze motorul ca fiind format din trei motoare cu doi cilindri in V la 900. Pentru fiecare manivela rezulta o forta sumara provenita de la rezultanta fortelor de inertie de ordin unu pentru cilindrul din stanga si cel din dreapta si din forta centrifuga a manivelei considerate (vezi si echilibrarea motorului cu doi cilindrii in V la 900):
![]() (4.159)
(4.159)
Aceasta rezultanta are marime constanta si este orientata pe directia manivelei. Ea poate fi echilibrata cu contragreutati dispuse pe fiecare manivela. Masa contragreutatilor necesare, dispuse la raza r , va fi:
![]() (4.160)
(4.160)
Trebuie mentionat faptul ca atat fortele de inertie de ordin unu cat si fortele centrifuge se echilibreaza reciproc pe ansamblul motorului. Echilibrarea lor pentru fiecare manivela in parte este necesara pentru a evita aparitia momentului fortelor de ordin unu si cel al fortelor centrifuge, adica:

Momentul rezultant al fortelor de ordin doi ramane neechilibrat si are urmatoarea expresie:
![]() (4.161)
(4.161)
|
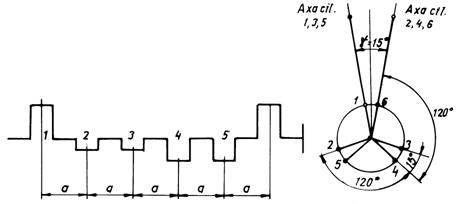
Fig. 4.35 Schema arborelui cotit la motorul cu 6 cilindri in V la 150 |
Motorul cu 6 cilindri in V la 150 in patru timpi are schema prezentata in fig.4.35. Arborele cotit are 6 manivele. Unghiul dintre manivelele corespunzatoare cilindrilor de pe aceeasi linie este de 1200, iar dintre manivelele vecine 150.
Expresiile fortelor de inertie de ordinul I sunt urmatoarele :
 (4.162)
(4.162)
Tinand cont ca:
 (4.163)
(4.163)
Se obtine:
![]() (4.164)
(4.164)
Pentru fortele de inertie de ordin doi se obtin expresiile:
 4.165)
4.165)
Avand in vedere ca
 (4.166)
(4.166)
se obtine
![]() (4.167)
(4.167)
Se analizeaza in continuare echilibrarea fortelor centrifuge Fr. Analiza se face prin descompunerea fortelor centrifuge pe directia primei manivele (a fortei Fr1), respectiv pe directia perpendiculara pe prima manivela, adica:

Dar
![]()
Se verifica usor ca

Deci, rezultanta fortelor centrifuge este nula, adica:
![]()
Analiza echilibrarii momentelor fortelor de inertie de ordin unu si doi se face efectuand suma de momente fata de axa primului cilindru, pe linii de cilindri si facand apoi insumarea geometric. Pentru a = 0 se obtin relatiile:
![]() (4.168)
(4.168)
![]() (4.169)
(4.169)
Momentele fortelor de inertie de ordin unu, respectiv doi pot fi echilibrate partial cu sisteme de echilibrare, cu arbori suplimentari.
Analiza momentului rezultant al fortelor centrifuge se face descompunand fortele centrifuge corespunzatoare tuturor cilindrilor pe directia manivelei 1, respectiv pe directia perpendiculara pe aceasta. Se obtine:

adica
 (4.170)
(4.170)
Momentul rezultant al fortelor centrifuge este:
![]() (4.171)
(4.171)
Momentul rezultant al fortelor centrifuge poate fi echilibrat prin contragreutati dispuse pe bratele arborelui cotit care sa anuleze fortele centrifuge corespunzatoare fiecarei manivele.
Schema motorului cu opt cilindri in linie, in patru timpi este prezentata in fig.4.36. Manivelele arborelui cotit sunt dispuse la 900.
Expresiile fortelor de ordinul unu sunt:
 (4.172)
(4.172)
Se constata ca rezultanta fortelor de ordin unu este nula, adica:
![]()
|
Fig.4.36 Schema motorului cu 8 cilindri in linie |
Fortele de inertie de ordin doi au expresiile de mai jos:
 (4.173)
(4.173)
Rezultanta fortelor de ordin doi va fi, deci, nula:
![]()
Fortele centrifuge sunt egale si constante ca marime si in faza cu manivelele arborelui cotit:
![]()
Datorita dispunerii favorabile a manivelelor arborelui cotit, fortele centrifuge se echilibreaza doua cate doua, deci rezultanta lor este nula:
![]()
Datorita dispunerii manivelelor simetric fata de mijlocul arborelui cotit momentele sumare ale fortelor de ordin unu, ordin doi si centrifuge vor fi nule, adica:
![]()
Prin urmare, la motorul cu 8 cilindri in linie, atat fortele, cat si momentele lor sunt complet echilibrate.
Schema motorului cu opt cilindri in V, in patru timpi este prezentata in fig.4.37. Stelajul manivelelor este identic cu cel de la motorul cu patru cilindri in linie, in doi timpi. Unghiul dintre liniile cilindrilor este de 900.
Analiza
echilibrarii se face privind motorul ca fiind constituit din patru motoare
cu cate doi cilindri in V. Dupa cum s-a aratat la motorul cu doi
cilindri in V, rezultanta fortelor de inertie de ordin unu este ![]() si este orientata radial dupa axa manivelei.
Datorita dispunerii in opozitie a manivelelor, rezultanta
fortelor de inertie de ordin unu este nula:
si este orientata radial dupa axa manivelei.
Datorita dispunerii in opozitie a manivelelor, rezultanta
fortelor de inertie de ordin unu este nula:
![]()
Pentru fiecare pereche de cilindri in V, tinand cont de dispunerea manivelelor, rezultanta fortelor de inertie de ordin doi se determina dupa cum urmeaza.
Pentru prima manivela:
 (4.174)
(4.174)
Pentru manivela a doua:
 (4.175)
(4.175)
Pentru manivela a treia:
|
Fig.4.37 Schema motorului cu 8 cilindri in V la 90o, in 4 timpi |
 (4.176)
(4.176)
Pentru manivela a patra:
 (4.177)
(4.177)
Fortele sumare de inertie de ordin doi pentru toate perechile de cilindrii sunt in planul orizontal al axei arborelui cotit. Ele, fiind egale ca marime si de sensuri opuse doua cate doua, se echilibreaza reciproc. Prin urmare, rezultanta fortelor de ordin doi este nula:
![]()
Momentele sumare ale fortelor de inertie de ordin doi pentru perechile de cilindri egal departati fata de mijlocul arborelui cotit sunt egale si de sensuri contrare. Prin urmare, momentul rezultant al fortelor de inertie de ordin doi pentru toti cilindrii va fi nul, adica:
![]()
Fortele sumare centrifuge pentru fiecare manivela in parte sunt egale ca marime si orientate radial dupa directia manivelelor respective. Deoarece manivelele sunt dispuse in acelasi plan doua cate doua si orientate in sensuri opuse, forta centrifuga sumara pentru toti cilindri este nula, adica:
![]()
Momentele fortelor centrifuge si momentele fortelor de inertie de ordin unu se analizeaza impreuna. Momentul sumar al fortelor centrifuge si fortelor de inertie de ordin unu se determina ca suma a momentelor fortelor centrifuge si fortelor FjI fata de mijlocul arborelui cotit (punctul A din fig.4.27)
Pentru manetoanele 1 si 4 momentul sumar va fi:
![]() (4.178)
(4.178)
Pentru manetoanele 2 si 3 momentul sumar va fi:
![]() (4.179)
(4.179)
Momentele SM1,4 si SM2,3 actioneaza in plane perpendiculare si deci, momentul sumar pentru toti cilindrii se obtine prin insumarea lor geometrica:
![]() (4.180)
(4.180)
sau
![]() (4.181)
(4.181)
Acest moment sumar actioneaza intr-un plan care contine axa arborelui cotit si face cu planul primei manivele un unghi j = 18o26' (fig.4.28)
 (4.182)
(4.182)
Acest moment, constant ca marime poate fi echilibrat prin doua contragreutati dispuse pe capetele arborelui cotit, ca in fig.4.29.
Masa contragreutatilor se determina din conditia egalitatii momentelor:
![]() (4.183)
(4.183)
sau, dupa transformari:
![]() (4.184)
(4.184)
In cadrul acestei grupe de motoare se analizeaza echilibrarea motorului cu cilindri in V la 900. Schema motorului este prezentata in fig.4.38. Schema arborelui cotit este identica cu a motorului cu cinci cilindri in linie (fig.4.30).
Studiul echilibrarii motorului cu zece cilindri in V de 900 se bazeaza pe cunoasterea problemelor echilibrarii motorului cu cinci cilindri in linie si motorului cu doi cilindri in V de 900.
Din studiul echilibrarii motorului cu cinci cilindri se cunoaste ca fortele de inertie de ordin unu si doi si fortele centrifuge se anuleaza. Prin urmare, la motorul cu zece cilindri in V de 900, utilizand un arbore cu manivelele dispuse la 720, facand analiza pentru fiecare rand de cilindri, rezultanta fortelor de inertie de ordin unu si doi si fortele centrifuge se anuleaza:
 (4.185)
(4.185)
Pentru analiza momentelor fortelor de inertie de ordin unu se porneste de la rezultanta pe fiecare manivela pentru cei doi cilindri, adica:
![]() (4.186)
(4.186)
Aceasta rezultanta actioneaza dupa directia manivelei si este constanta ca marime, deci ea poate fi tratata ca o forta centrifuga. Rezultanta fortelor de inertie de ordin unu de pe fiecare manivela se insumeaza cu forta centrifuga corespunzatoare manivelei si se obtine:
![]() (4.187)
(4.187)
Momentele acestor forte sumare pentru toate cele cinci manivele se insumeaza ca si momentele fortelor centrifuge de la motorul cu cinci cilindri in linie, dand un moment de dezechilibru Md.
Se utilizeaza pentru echilibrarea momentului Md 6 contragreutati dispuse pe bratele arborelui cotit ca la motorul cu cinci cilindri in linie (fig.4.31). Este necesar ca momentul compensator Mc al fortelor centrifuge al celor 6 contragreutati sa fie mai mare decat momentul Md (Mc>Md), fiind necesara o rezerva pentru echilibrarea dinamica a arborelui cotit.
Momentele fortelor de ordinul doi se studiaza considerand fortele rezultante pe cele cinci manivele (vezi echilibrarea motorului cu doi cilindri in V la 900), adica:
 (4.188)
(4.188)
Toate aceste forte rezultante actioneaza in plan orizontal. Schematic, ele sunt reprezentate in fig.4.39.
|
Fig. 4.38 Schema motorului cu 10 cilindri in V la 90 |
|
Fig.4.39 Schema fortelor FjII la motorul cu 10 cilindri in V la 90 |
Calculand momentul rezultantelor fortelor de ordin doi fata de mijlocul motorului (manivela 3) se obtine relatia:
![]()
sau
![]() (4.189)
(4.189)
unde a reprezinta distanta dintre doua manivele consecutive .
Pentru a = 0 se obtine expresia:
![]() (4.190)
(4.190)
Momentul rezultant al fortelor de inertie de ordin doi ramane neechilibrat.
Se va analiza echilibrarea motorului cu doisprezece cilindri in V de 900 (12 V 900), in patru timpi. Unghiul dintre manivele este de 1200. Schema arborelui cotit este identica cu cea a arborelui motorului cu sase cilindri in linie.
Motorul 12V900 se realizeaza in cazul cand face parte dintr-o familie care cuprinde motoare 8V900 si 10V900, (toate aceste motoare putand fi fabricate pe aceleasi linii tehnologice.
Studiul echilibrarii motorului cu 12 cilindri in V de 900 se bazeaza pe analiza echilibrarii motorului cu sase cilindri in linie si motorului cu doi cilindri in V de 900 (2V900).
Din studiul echilibrarii motorului cu sase cilindri in linie, se stie ca fortele de inertie de ordin unu si doi si fortele centrifuge se anuleaza. Prin urmare, la motorul cu 12 cilindri in V de 900 se poate scrie pentru fiecare rand de cilindri suma fortelor de inertie si a celor centrifuge:
 (4.191)
(4.191)
unde:
Pentru analiza momentelor fortelor de inertie de ordin unu se porneste de la rezultanta pe fiecare manivela pentru cei doi cilindri, adica:
![]() (4.192)
(4.192)
Aceasta rezultanta actioneaza dupa directia manivelei si este constanta ca marime, deci ea poate fi tratata ca o forta centrifuga. Rezultanta fortelor de ordin unu de pe fiecare manivela se insumeaza cu forta centrifuga corespunzatoare manivelei si se obtine:
![]() (4.193)
(4.193)
Momentele acestor forte pentru toate manivelele dispuse simetric fata de mijlocul arborelui cotit se echilibreaza reciproc, dar incarca fusurile paliere si, in special, fusul palier din mijloc, adica:
 (4.194)
(4.194)
Momentul rezultant pentru toate manivelele este nul, adica:
![]()
Pentru descarcarea lagarelor se pot pune contragreutati pe fiecare brat de manivela cu masa:
![]() (4.195)
(4.195)
Analiza momentelor fortelor de inertie de ordin doi se face pornind de la rezultanta pe fiecare manivela a arborelui (vezi echilibrarea motorului cu doi cilindri in V la 900), adica:
 (4.196)
(4.196)
Momentele rezultantelor fortelor de ordin doi de pe manivelele simetrice fata de mijlocul arborelui cotit se echilibreaza reciproc, adica:
 (4.197)
(4.197)
Prin urmare, momentul rezultant al fortelor de ordin doi pentru toti cilindri este nul:
![]()
Asadar, motorul cu 12 cilindri in V la 900 este complet echilibrat.
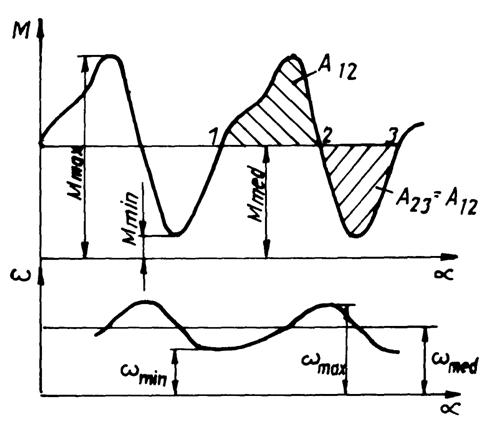
Variatia momentului motor conduce la accelerari si decelerari ale arborelui cotit. Aceasta conduce la acumulari sau restituiri de energie cinetica in mecanismul motor in perioada de accelerare respectiv decelerare.
|
Fig.4.40. Influenta neuniformitatii momentului motor asupra vitezei unghiulare a arborelui cotit |
In fig.4.40 se evidentiaza influenta neuniformitatii momentului motor asupra vitezei unghiulare a arborelui cotit.
In regim stationar de functionare a motorului, variatiile vitezei unghiulare se apreciaza prin gradul de neuniformitate d, care reprezinta raportul dintre amplitudinea maxima a vitezei unghiulare si valoarea sa medie, adica:
![]() (4.198)
(4.198)
Gradul de neuniformitate a vitezei unghiulare se alege din conditii functionale impuse motorului sau autovehiculului, corelandu-se cu valoarea momentului de inertie a volantului. In general pentru d se recomanda urmatoarele valori:
d = 1/180.1/300 pentru motoare de automobile;
d = 1/80.1/150 pentru motoare de tractoare si masini agricole.
Pentru alegerea volantului se determina prin planimetrare marimea lucrului mecanic suplimentar A12 (fig.4.40).
Momentul de inertie necesar al volantului se poate determina cu relatia urmatoare:
![]() (4.199)
(4.199)
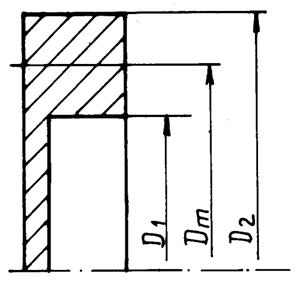
unde mv - masa volantului;
Dm =(D1+D2)/2 - diametrul mediu al volantului (vezi fig.4.41)
Deci, dimensiunile principale ale volantului pot fi determinate cu relatia urmatoare:
![]() (4.200)
(4.200)
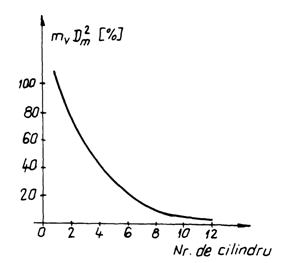
Pentru un grad de neuniformitate a vitezei unghiulare impus, dimensiunile volantului vor depinde de neuniformitatea momentului motor prin marimea ariei A12, care la randul sau depinde de numarul cilindrilor. Dependenta dimensiunilor relative ale volantului de numarul de cilindri se reprezinta in fig.4.42.
Se constata ca la cresterea numarului de cilindri se poate obtine acelasi grad de neuniformitate a vitezei unghiulare cu un volant de dimensiuni mult mai mici.
|
Fig. 4.41 Elementele dimensionale ale volantului |
|
Fig. 4.42 Dependenta dimensiunilor relative ale volantului de numarul de cilindri |
Diametrul volantului se limiteaza astfel incat viteza periferica sa nu depaseasca 65 [m/s] pentru volanti din fonta, respectiv 100 [m/s] pentru volanti din otel.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 7566
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved