| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Scopul lucrarii
Continutul acestei lucrari urmareste sa familiarizeze studentii cu echipamentele utilizate in procesul de fabricatie, la manipularea materiei prime, a semifabricatelor si a produsului finit.
Linie tehnologica = a) organizare a procesului de fabricatie, in care operatiile sunt efectuate la locuri de munca dispuse in ordinea succesiunii operatiilor de fabricare; b) ansamblu de masini de lucru, instalatii si mijloace de transport dintr-o fabrica sau uzina, dispuse in ordinea succesiunii operatiilor prevazute de procesul tehnologic. Linie automata = complex de masini-unelte sau agregate care executa in mod automat operatiile de prelucrare a unor piese, organe de masini, produse etc. si care asigura transportul acestora de la o masina la alta fara interventia muncitorului.
Prin manipulare se intelege ansamblul miscarilor de lucru care asigura deplasarea si asezarea corecta a materiei prime, semifabricatelor si/sau a pieselor pe tot parcursul unor operatii tehnologice.
Trecerea de la manipularea efectuata cu ajutorul operatorului uman, la manipularea automata, reprezinta una din problemele cele mai importante ale automatizarii productiei industriale.
O pondere insemnata din manipulari se mai executa cu interventia directa a omului, dar exista o gama larga de mecanisme si echipamente care se folosesc ca mijloace de manipulare. Acestea sunt specifice directiei de utilizare. Principalele directii de utilizare in industrie a acestora ca mijloace de manipulare automata sunt la:
Prelucrari mecanice,
Operatii de control,
Operatii de montaj, vopsire, incarcare, impachetare.
Alte directii.
Prelucrarile mecanice constau in prelucrarea materiei prime, materialelor, reperelor subansamblelor, etc;
Operatiile de control constau in controlul dimensional, volumetric, masic, electric, etc;
Operatiile de montaj constau in asamblarea unor repere sau subansamble;
Operatiile de incarcare cuprind toate operatiile de imbuteliere sau umplere/alimentare cu materii prime sau materiale.
In categoria alte directii au fost incluse mijloace de manipulare automata din sfera serviciilor, cercetarea spatiului cosmic, cercetarea fundamentala, manipulari speciale foarte periculoase, etc.
Explicarea unor termeni tehnici aflati in legatura cu echipamentele de manipulare
automacara - macara montata pe autosasiu.

coeficient de incercare - raportul matematic intre sarcina utilizata pentru efectuarea incercarilor statice sau dinamice pentru o piesa a masinii de ridicat, un dispozitiv de legare ori de prindere sau o masina de ridicat si sarcina maxima de utilizare marcata pe piesa echipamentului, pe dispozitivul de prindere, pe dispozitivul de legare sau pe masina de ridicat.
curatitor de sina - componenta de securitate destinata indepartarii de pe calea de rulare a obstacolelor sau obiectelor care s-ar putea gasi pe aceasta.
deschidere - inseamna:
a) distanta pe orizontala intre axele sinelor cailor de rulare ale masinii de ridicat (de exemplu: pod rulant, macara portal);
b) distanta pe orizontala intre axul de rotire a platformei macaralei si verticala care trece prin axul carligului.
dispozitiv de blocare - inseamna:
a) componenta de securitate la macaralele pe cai de rulare cu sine care are drept scop impiedicarea deplasarii macaralei aflate in repaus si care poate fi supusa actiunii unor forte exterioare (de exemplu: vant);
b)
dispozitiv destinat impiedicarii utilizarii masinilor de ridicat
de persoane  neautorizate.
neautorizate.
dispozitiv de evitare a mersului oblic - componenta de securitate destinata indicarii sau redresarii automate in scopul evitarii mersului oblic al masinii de ridicat.
dispozitiv de prindere pentru ridicarea sarcinii - componenta sau echipament nefixat la masina de ridicat si care se afla intre masina si sarcina, sau pe sarcina, in scopul prinderii acesteia.
ELECTROPALAN CU LANT - DEMAG DC
- Realizat
pe principiul ,,plug and lift', poate fi pus rapid in functiune
- Utilizare precisa si sigura in orice situatie
- Primul electropalan cu lant echipat cu cutie de comanda ce poate fi
ajustata pentru orice inaltime
- Servisare realizata printr-o interfata de diagnosticare
electropalan - palan cu actionare electrica, la care cablul sau lant care sustine sarcina se infasoara pe unul sau mai multi tamburi.
 Electropalanul cu cablu Demag DR:
Electropalanul cu cablu Demag DR:
- Electropalan fara contragreutate
- Grupa de functionare (FEM) 2 m+ ,
mareste cu 20% durata de functionare
- Viteza de ridicare mai mare
- Dotarea standard include regulator de
frecventa
- Protectie IP 55 pentru utilizare in
conditii extreme
- Un nou concept de siguranta pentru
sistemul de franare al motorului de
ridicare
- Manipulare usoara datorita protectiei
cablului prevazuta la mufla carligului
- Comanda este realizata in doua
variante: comanda de la sol DSE8-R
si comanda radio DRC. Viteza de
ridicare creste sau scade, in functie
de apasarea treptata a butoanelor.
Alte caracteristici ale casetelor de
comanda: display, interfata IrDa, tehnologie radio standard GSM.
- Echipamentul electric inglobeaza tehnologia CAN bus
- Software-ul instalat permite activarea mai multor optiuni
electrostivuitor - stivuitor autopropulsat a carui actionare este electrica

elevator pentru vehicule - masina de ridicat care serveste la ridicarea vehiculelor pe verticala.
frana - dispozitiv destinat reducerii vitezei si/sau opririi mecanismelor masinii de ridicat.
 graifer - cupe/gheare cu inchidere si deschidere
comandata mecanic sau hidraulic atasate macaralelor, care servesc la
prinderea, ridicarea, deplasarea si descarcarea materialelor.
graifer - cupe/gheare cu inchidere si deschidere
comandata mecanic sau hidraulic atasate macaralelor, care servesc la
prinderea, ridicarea, deplasarea si descarcarea materialelor.
intretinere - totalitatea operatiilor prin care se asigura mentinerea unei masini de ridicat in parametrii de functionare in conditii de siguranta.
limitator de sarcina/limitator de moment al sarcinii - compenenta de securitate destinata sa intrerupa actionarea mecanismului de ridicat in cazul depasirii sarcinii nominale, respectiv a momentului, permitand actionarea mecanismului in sensul coborarii sarcinii, respectiv al micsorarii momentului sarcinii.
limitator de sfarsit de cursa - componenta de securitate destinata sa intrerupa actionarea mecanismelor masinii de ridicat cand partile sale in miscare ating pozitiile limita de lucru stabilite, permitand actionarea mecanismelor in sens invers celui in care s-a limitat miscarea respectiva.
limitator de viteza - componenta de securitate care, la depasirea unei viteze stabilite, actioneaza paracazatorul si comanda oprirea dispozitivului de ridicare a sarcinii.
 macara - masina de ridicat cu functionare
ciclica in regim intermitent care serveste la deplasarea sarcinilor
intre puncte situate la inaltimi diferite.
macara - masina de ridicat cu functionare
ciclica in regim intermitent care serveste la deplasarea sarcinilor
intre puncte situate la inaltimi diferite.
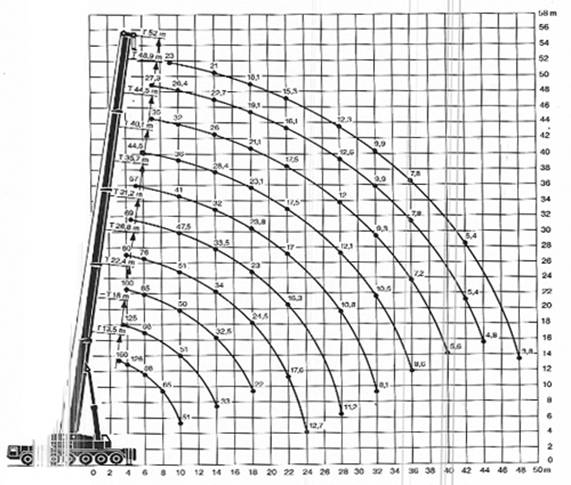
Liebherr ltm 160
 mentenanta - ansamblul operatiilor efectuate
pentru asigurarea functionarii in securitate a masinii de
ridicat si a componentelor sale, pe intreaga sa durata de
viata.
mentenanta - ansamblul operatiilor efectuate
pentru asigurarea functionarii in securitate a masinii de
ridicat si a componentelor sale, pe intreaga sa durata de
viata.
montare - activitatea de imbinare definitiva a aparatelor de masurare si control si/sau a subansamblurilor unei masini de ridicat conform documentatiei tehnice.
motostivuitor - stivuitor autopropulsat actionat de motor cu ardere interna.
opritor - componenta de securitate destinata limitarii deplasarii peste pozitiile limita de lucru stabilite.
palan - mecanism de ridicat format din roti de cablu sau lant cu axe deplasabile sau nedeplasabile. Deplasarea pe verticala a sarcinii se realizeaza prin actionarea cablurilor sau lanturilor care se infasoara in jurul acestor roti.

piesa de reazem - componenta de securitate destinata evitarii socurilor provenite din spargerea accidentala a rotilor de rulare sau din ruperea axelor acestora, precum si impotriva deraierii.
platforma ridicatoare - masina de ridicat destinata transportului la inaltime a persoanelor si/sau materialelor.

revizie - activitatea, de regula planificata, ce consta in ansamblul operatiilor ce se executa asupra unei masini de ridicat in scopul reglarii pieselor si aparatelor inglobate in aceasta.
sarcina - orice bun de natura materiala care constituie obiect de lucru al masinii de ridicat.
sarcina nominala - sarcina maxima pentru care a fost proiectata si construita masina de ridicat.
specializare - pregatirea profesionala care conduce la dezvoltarea competentelor profesionale in cadrul aceleiasi calificari sau la dobandirea de competente profesionale noi in aceeasi arie ocupationala.
tampon - componenta de securitate destinata amortizarii socurilor la impact.
troliu - mecanism de ridicat prevazut cu un sistem de demultiplicare si cu un tambur pe care se infasoara cablul sau lantul prin intermediul carora se efectueaza manevrarea sarcinii.
verificare tehnica - totalitatea examinarilor si/sau incercarilor ce se realizeaza, in baza documentatiei tehnice aplicabile unei masini de ridicat si prevederilor prescriptiilor tehnice, in scopul evaluarii masurii in care masina de ridicat satisface cerintele de functionare in conditii de siguranta.
vinci - mecanism de ridicat folosit pentru ridicarea unor greutati mari la mica inaltime.
Pentru coacerea vafelor se folosesc cuptoare continue. Acestea pot fi mecanice sau manuale. Cuptoarele mecanice au inceput sa le inlocuiasca pe cele manuale deoarece au productivitate scazuta si consum mare de forta de munca.
Cuptorul mecanic se compune dintr-o carcasa termoizolanta (1) prevazuta cu posibilitatea de a se demonta usor, ceea ce permite cu usurinta accesul la organele de lucru din interior
Carcasa acopera un transportor continuu cu lant (2), pe care sunt montate la distante egale, cu mici spatii intre ele, matritele (3). La unul din capetele carcasei, transportorul este descoperit si reprezinta zona in care se executa operatiile de scoatere a foilor coapte si de incarcare cu aluat.
Pentru efectuarea mecanica a acestor operatii cuptorul are in aceasta zona doua ghidaje (4), care prind carligul matritei, o deschid prin ridicarea capacului si datorita inclinarii partii de jos foaia de vafa aluneca (5).
 Pentru deplasarea in
continuare a matritei, in pozitia deschisa, ea ajunge la punctul
(6) de incarcare cu aluat, dupa care forma este inchisa mecanic,
se blocheaza cu ajutorul clichetului si se introduce in cuptor, unde
executa un ciclu de operatii complet, revenind in pozitia in
care se deschide matrita. In acelasi fel operatiile se reiau
pentru fiecare matrita in parte.
Pentru deplasarea in
continuare a matritei, in pozitia deschisa, ea ajunge la punctul
(6) de incarcare cu aluat, dupa care forma este inchisa mecanic,
se blocheaza cu ajutorul clichetului si se introduce in cuptor, unde
executa un ciclu de operatii complet, revenind in pozitia in
care se deschide matrita. In acelasi fel operatiile se reiau
pentru fiecare matrita in parte.
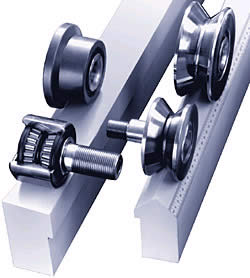 Sistemele de manipulare a
greutatilor cu poduri rulante sunt destinate manipularii cu
precizie a greutatilor ridicate in conditii grele de lucru.
Imbina capacitatea ridicata a podurilor rulante cu ghidajele din
otel foarte rezistent la compresie, taiate la lungimea dorita.
Sistemele de manipulare a
greutatilor cu poduri rulante sunt destinate manipularii cu
precizie a greutatilor ridicate in conditii grele de lucru.
Imbina capacitatea ridicata a podurilor rulante cu ghidajele din
otel foarte rezistent la compresie, taiate la lungimea dorita.Cablurile pentru podurile rulante sunt fabricate din otel inalt aliat, invelite cu un strat dur (duritate Rc 55-60) si avand un miez dur. Rulmentii cu role mari, de precizie ridicata, precum si rulmentii cu bile puternic ingropate fac fata tensiunilor ridicate radiale si axiale precum si vitezelor ridicate. Rulmentii cu role sunt bine etansati si lubrifiati pe viata pentru a face fata temperaturilor ridicate, impuritatilor, prafului si umezelii. Se folosesc piulite inguste foarte dure, cu profil hexagonal, pentru instalarea rapida si usoara.Axele de tip Yoke elimina necesitatea de fabricare de catre client. Sinele sunt drepte si rezistente la torsiuni, avand suprafetele de ghidare foarte dure.
 Industria metalurgica
Industria metalurgicaManipularea
materialelor
Industria alimentara
Industria celulozei si hartiei
Industria lemnului
Echipamente pentru agricultura
Depozitare
Manipularea bagajelor
Benzi pietonale in aeroporturi
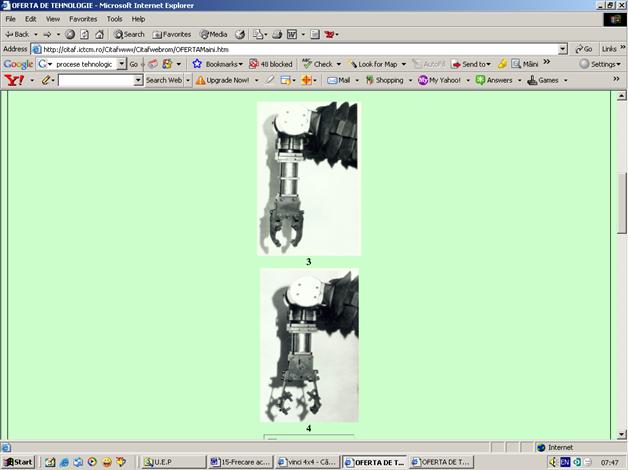
Maini mecanice interschimbabile automat, adaptate la roboti industriali, pentru procese tehnologice.
Descriere
La aplicatiile actuale, in cadrul programului de lucru al unei celule robotizate, schimbarea automata a dispozitivelor de apucare sau a celor de lucru de catre un robot se face prin intermediul unui modul de cuplare mecanica, energetica si informationala prevazut cu dispozitive de actionare a mecanismelor de cuplare, fapt care mareste lungimea bratului de parghie al fortei rezistente si conduce la constructii mai complexe, cu greutati si, implicit, puteri consumate mai mari. Cu scopul obtinerii unor dimensiuni si greutati ale modulului de cuplare cat mai reduse, in cadrul aplicatiilor realizate de catre institut, s-au elaborat solutii originale de sisteme de cuplare automata a mainilor mecanice si a dispozitivelor de lucru la bratul unui robot, precum si a diverselor tipuri de "degete" la structura unei maini mecanice. In acest fel se elimina dispozitivul de actionare a mecanismului de zavorare / dezavorare, iar constructia mainii mecanice si a modulului de cuplare, dimensiunile, greutatea si, implicit, puterea consumata de catre robot, se reduc substantial. In pozele de mai jos se prezinta diverse modele experimentale de maini mecanice care se pot cupla automat la bratul unui robot.
DOMENII DE APLICARE
Realizarea unor celule robotizate flexibile pentru procese tehnologice complexe:
forjare pe ciocan matritor, cu piesa tinuta in mana robotului;
forjare pe ciocan matritor, cu piesa depusa in matrita;
celula robotizata pentru executia pe maxiprese a pieselor matritate;
turnare sub presiune;
sudare electrica prin presiune in puncte, (pentru celula robotizata si pentru cea mixta - om - robot) ;
celula de prelucrare mecanica a pieselor (frezare, centruire, strunjire, frezare canale de pana).
Linii de asamblare automobile

 -Automobile Dacia-
-Automobile Dacia-
Utilaje si materiale folosite
In cadrul lucrarii se foloseste echipamentul aflat in laborator, este vorba despre asa numitul buncar cu vibrator (aflat in figura )

Buncarele realizeaza depozitarea obiectelor manipulate in stare dezordonata (in vrac). Totodata buncarul este un element al sistemului de alimentare, constituit din buncarul propriu zis si din mecanismul de extragere si orientare a obiectelor materiale. Acest echipament asigura depozitarea obiectelor materiale de dimensiuni reduse intr-o cantitate necesara alimentarii automate pentru un interval de timp bine determinat.
Prin constructia sa, buncarul asigura si transferul obiectelor materiale spre mecanismul de orientare.
Golirea buncarului se poate face prin rasturnare sau automat (pe cale gravitationala, prin actiunea fortelor de inertie, cu elemente/mecanisme de captare).
Clasificare
-dupa forma prismatice, tronconice, conice, cilindrice, si alte forme;
-dupa numarul spatiilor de depozitare: cu unul sau doua spatii de depozitare;
-dupa traiectoria miscarii fixe, cu miscare de translatie si cu miscare de rotatie;
-dupa pozitia axei de rotatie cu axa orizontala, cu axa verticala si cu axa inclinata.
Forma si dimensiunile buncarului sunt determinate de traiectoria miscarii obiectelor materiale in mecanismul de orientare de produvtivitatea masinii unelte, de durata ciclului de lucru, de numarul masinilor unelte integrate an linia automata si de influenta depozitarii asupra starii suprafetelor obiectelor.
In buncarele cu spatiu de depozitare este dispus si mecanismul de orientare. Acesta supune semifabricatele unei miscari dezordonate care poate produce deformarea lor sau poate avea urmari nedorite asupra starii suprafetelor
Volumul buncarului Vt se calculeaza cu relatia
![]() [
[
unde:
VO - volumul O.M., ]n cm3;
TS - timpul functionarii continue a sistemului de alimentare, in min
q - coeficientul de umplere a volumului(q = 0,4.0,7) depinzand de forma obiectelor depozitate
QMO - productivitatea medie a mecanismului de orientare, in buc/min.
Buncarele se construiesc fie stationare (fixe), fie in miscare (rotativa, oscilanta sau vibratoare).
Caracterizarea unui buncar se face prin numarul de obiecte care se pot depozita in el.

Se parcurg urmatoarele etape
- se identifica echipamentul utilizat
 se stabilesc elementele
componente;
se stabilesc elementele
componente;
se explica modul de functionare.

Se fac observatii in legatura cu caracteristicile echipamentului observat si se face o paralela cu alte echipamente avand aceeasi destinatie.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3354
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved