| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
MODELAREA MATEMATICÃ A MISCÃRII VIBRATORII
ECUATIILE LUI LAGRANGE
Studiul miscarilor vibratorii ale sistemelor mecanice are la baza analiza legaturilor care exista intre marimile de intrare si marimile de iesire . Aceste legaturi cauza-efect sunt descrise , asa cum s-a mentionat in cadrul capitolului 1 , de o serie de ecuatii diferentiale.
Stabilirea formei ecuatiilor diferentiale se poate face fie pe baza Ecuatiilor lui Lagrange ,fie utilizand Principiul lui d'Alembert fie utilizand metoda coeficientilor de influenta .
Deducerea ecuatilor de miscare pe baza ecuatiilor lui Lagrange
De multe ori precizarea fortelor si/ sau momentelor din legaturi este foarte greu de facut . In aceste situatii sunt utile in studio ecuatiile lui Lagrange de speta a-II-a :
![]() rel 1
rel 1
unde Ec si Ep reprezinta energia cinetica ,respectiv energia potentiala a sistemului condiderat , qi sunt coordonatele generalizate , qi derivatele in raport cu timpul al coordonatelor generalizate iar Qi sunt fortele generalizate .
Fortele generalizate Qi cuprind toate fortele si / sau momentele care apar intr-un sistem cu exceptia celor ce deriva dintr-un potential .Spre exemplificare se considera sistem in figura 1 .In figura 1 a este prezentat cazul unui sistem cu un singur grad de libertate .
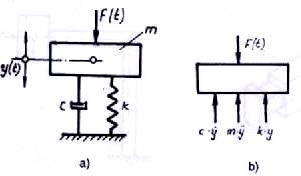 fig 1 Sistem cu un grad de libertate : a) modelul Kelvin-Voigt
b)fortele ce actioneaza asupra sistemului
fig 1 Sistem cu un grad de libertate : a) modelul Kelvin-Voigt
b)fortele ce actioneaza asupra sistemului
Energiile cinetica si potentiala sunt :
 rel 2
rel 2
Considerand drept coordonata
generalizata ![]() si tinand cont ca :
si tinand cont ca :
 rel 3
rel 3
iar fortele generalizate sunt egale cu :
![]() rel 4
rel 4
pe baza ecuatiei din relatia 1 se obtine :
![]() rel 5
rel 5
Deducerea ecuatiilor de miscare pe baza Principiului d'Alembert
Principiul lui d'Alembert poate fi formulat sub forma :fortele date (direct aplicate ) , de legatura si inertie isi fac echilibrul (forte de inertie impreuna cu fortele proprii fac echilibrul legaturilor ).
Aceasta metoda este deosebit de utila in cazul in care fortele care actiioneaza asupra sistemului pot fi puse distinct in evidenta .
Considerand sistemul cu un grad de libertate din figura 1 prin aplicarea principiului lui d'Alembert se obtine :
![]() rel 6
rel 6
in care Fe este forta elastica dezvoltata in elemental elastic , Fa este forta de amortizare care apare in elementul de amortizare de constanta c si sunt date de :
 rel 7
rel 7
Inlocuind relatiile 7 in 6 si rearajand termenii se obtine ecuatia de miscare din relatia 5![]()
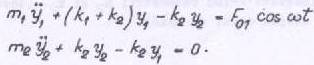
In cazul sistemului cu doua grade de libertate descrise in figura 2 prin aplicarea principiului lui d'Alembert pentru ambele mase se obtine:
![]() rel 8
rel 8
Componentele din relatia 8 sunt date de :
![]() rel 9
rel 9
Inlocuind relatia 9 in relatia 8 si rearajand termenii rezulta ecuatia de miscare de mai jos:
![]() rel 10
rel 10
REGIMUL DE FUNCTIONARE A
SISTEMELOR DINAMICE
Mare parte din sistemele dinamice care intervin in analiza si / sau sinteza comportarii masinilor-unelte aflate sub actiunea sarcinilor variabile in timp sunt liniare si invariante in timp .
Fara a particulariza generalitatea definitiilor de mai jos, ci numai pentru simplificarea expunerii ,fie sistemul mecanic descrise de ecuatia :
![]() rel 11
rel 11
Notand cu ![]() solutia ecuatiei
omogene :
solutia ecuatiei
omogene :
![]() rel 12
rel 12
in care 0 este matricea nula avand aceleasi dimensiuni cu y si cu yf solutia particulara a ecuatiei din relatia 11 , raspunsul sistemului considerat este :
![]() rel 13
rel 13
In cazul particular in care y=yl descrise de o ecuatie de tipul relatiei 1 se afla in regim liber de functionare iar daca y=yf sistemul in cauza se afla in regim fortat de functionare .
Atunci
cand vitezele de variatie in timp ale marimii de iesire pot fi neglijate adica daca : ![]() rel 14
rel 14
sistemul dinamic functioneaza in regim stationar .
Combinarea ecuatiilor de la relatiile 11 si 14 arata ca in regim static sistemul considerat este descris de ecuatia :
K * y=F rel 15
Asa cum rezulta din relatia 15in regim stationar marimea de iesire a sistemului are aceeasi forma cu marimea de intrare .
Un caz particular al regimului stationar dar deosebit de important in special pentru comportarea structurilor masinilor - unelte il constituie acela in care intrarea sistemului dinamic este o marime invariabila in timp .
Intr-o asemenea situatie se spune
ca sistemul se afla in regim static de functionare . Pentru a marca faptul ca
sistemul mecanic descris matematic prin ecuatia de la relatia 11 iar relatia 14 si se scrie astfel![]() rel 16
rel 16
Regimul liber
Dupa cum s-a aratat mai sus un sistem dinamic se afla in regim liber de functionare atunci cand marimea sa de iesire are forma solutiei generale a ecuatiei omogene asociate ecuatiei diferentiale ce-l descrie din punct de vedere matematic .
Acest regim se face simtit atunci cand marimea de intrare trece de la o valoare stationara la alta , in particular una din cele doua valori stationare putand fi zero .
In cazul sistemului mecanic descris de ecuatia din relatia 11 existenta regimului liber este datorata prezentei inertiei mecanice si a amortizarilor din sistem , datorita acestora marimea de iesire nereusind sa urmareasca in mod instantaneu variatiile marimii de intrare .
In functionarea masinilor-unelte regimurile tranzitorii se intalnesc cu mare frecventa . Ele apar la cuplarea si decuplarea lanturilor cinematice principale si a celor auxiliare , la intrarea si iesirea taisurilor sculei in ,respective din materialul piesei care se prelucreaza .
Solutionarea diverselor probleme care intervin in studiul regimului tranzitoriu al unui sistem dinamic este legata de cunoasterea expresiei componentei libere a raspunsului acestui sistem .
1.1 Sistemul dinamic monovariabil
Multe sisteme dinamice monovariabile invariante in timp sunt descrise prin ecuatii diferentiale de tipul :
![]() rel 17
rel 17
Impartind ecuatia de la relatia 17 la k ≠ 0 se poate scrie :
![]() rel 18
rel 18
unde
:![]() rel 19
rel 19
reprezinta constantele de timp ale sistemului considerat .
Daca relatia ![]() reprezinta ecuatia
de miscare a unui sistem mecanic , atunci in locul relatiei 18 se foloseste
ecuatia :
reprezinta ecuatia
de miscare a unui sistem mecanic , atunci in locul relatiei 18 se foloseste
ecuatia :
![]() rel 20
rel 20
in care :![]() rel 21
rel 21
Marimile ![]() si
si ![]() reprezinta pulsatia
proprie respective factorul de amortizare ale sistemului mecanic . Cu ajutorul
relatiei
reprezinta pulsatia
proprie respective factorul de amortizare ale sistemului mecanic . Cu ajutorul
relatiei
![]() rel 22
rel 22
pot fi definite frecventa proprie ![]() si perioada proprie
si perioada proprie ![]() .
.
Pentru structurile elastice la care factorii de amortizare sunt pozitivi si subunitari asemenea solutii generale pot fi puse in forme specifice , cu ajutorul carora se pun in evidenta marimile caracterizate pentru diversele tipuri de vibratii mecanice .
In cazul particular ![]() solutia generala solutia generala a ecuatiei
omogene este :
solutia generala solutia generala a ecuatiei
omogene este : ![]() rel 23
rel 23
si se scrie : ![]() rel 24
rel 24
Tinand cont de cele definite functia este pur armonica . Prin urmare ,
daca ![]() miscarea existenta in sistemul mecanic descris de ecuatia din relatia 14 este o miscare vibratorie
libera neamortizata .
miscarea existenta in sistemul mecanic descris de ecuatia din relatia 14 este o miscare vibratorie
libera neamortizata .
Amplitudinea A [m] si faza
initiala ![]() se determina , in functie de conditiile initiale
:
se determina , in functie de conditiile initiale
:
![]() rel 25
rel 25
prin relatiile
![]() rel 26 .
rel 26 .
Marimea ![]() care apare in relatiile 24 si 26 are aceasi
semnificatie ca in relatia 2 Ea se numeste pulsatie a vibratiilor libere
neamortizate .
care apare in relatiile 24 si 26 are aceasi
semnificatie ca in relatia 2 Ea se numeste pulsatie a vibratiilor libere
neamortizate .
Daca ![]() sistemul mecanic descris de relatia 20 in care
sistemul mecanic descris de relatia 20 in care![]()
se afla in miscare vibratorie nearmonizata . Se poate arata ca in acest caz raspunsul sistemului poate fi pus in forma :
![]() rel 27
rel 27
in care :
![]() rel 28
rel 28
este pseudopulsatia iar constantele ![]() si
si ![]() se determina cu relatiile :
se determina cu relatiile :
 rel 29
rel 29
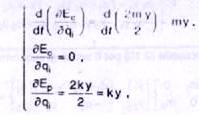
Reprezentarile grafice ale raspunsurilor libere date de
relatiile 24 si 27 pot fi urmarite in figura 20 din care rezulta si
semnificatiile marimilor ![]()
![]() si
si ![]() .
.
 fig 2
fig 2
Asa cum arata figura 2 b prin cresterea timpului raspunsul ![]() tinde la zero . Evaluarea vitezei cu care
tinde la zero . Evaluarea vitezei cu care ![]() tinde sa se anuleze poate fi efectuata cu
ajutorul marimii numita decrement logaritmic .
tinde sa se anuleze poate fi efectuata cu
ajutorul marimii numita decrement logaritmic .
Decrementul logarithmic , notat in lucrarea de fata cu ∆ , este egal cu logaritmul natural al raportului a doua amplitudini successive . Ca urmare , in comformitate cu relatiile 27 si 28 se poate scrie succesiv :
 rel 30
rel 30
Pentru ![]() formula calculului lui ∆ capata forma
aproximativa :
formula calculului lui ∆ capata forma
aproximativa :
![]() rel 31
rel 31
Daca Aa1
si Aa2 sunt doua amplitudini successive ale vibratiei
libere amortizate se poate scrie : rel 32
rel 32
Dezvoltand functia ![]() in serie Mac-Laurin si pastrand numai termenii
liniari ai dezvoltarii 32 conduce la o alta formula pentru calcul lui ∆ :
in serie Mac-Laurin si pastrand numai termenii
liniari ai dezvoltarii 32 conduce la o alta formula pentru calcul lui ∆ :
![]() rel 33
rel 33
Formula
care se aplica pentru ![]()
Cazul ![]() nu se intalneste la structurile elastice ale
masinilor-unelte .
nu se intalneste la structurile elastice ale
masinilor-unelte .
el poate apare in acele ecuatii din relatia 20 cu ajutorul carora se descriu matematic diverse sisteme dinamice de tipul SM ,PA etc .
Pentru ![]() din relatia 20 se obtine coeficientul critic
de amortizare :
din relatia 20 se obtine coeficientul critic
de amortizare :
![]() rel 34
rel 34
Tinand cont de relatiile 21 si 34 factorul de amortizare poate fi prezentat in forma:
![]() rel 35
rel 35
Motiv pentru care el se mai numeste si raport de amortizare
Cele prezentate mai sus cu privire
la raspunsul sistemului mechanic unidimensional pot fi formulate si cu ajutorul
constantelor de timp care intervin in ecuatia din relatia 18 . In acest scop este necesar sa se tina de
relatiile prin care ωn si ![]() se calculeaza in functie de T1 si T :
se calculeaza in functie de T1 si T :
![]() rel 36
rel 36
Sistemele dinamice descrise prin ecuatii diferentiale se numesc sisteme de ordinal doi .
REGIMUL FORTAT
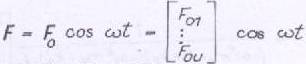
De foarte multe ori la intrarea sistemelor dinamice , in particular a acelor mecanice , se aplica semnale periodice de timp . Dezvoltarea in serie Fourier a acestor functii arata ca primul termen numit armonica fundamentala , are modulul cel mai mare .Structurile elastice ale masinilor-unelte poseda proprietatea de filtru trece-jos , ceea ce inseamna ca la iesirea sistemului mecanic asociat unei structuri elastice se resimte practice numai influenta armonicii fundamentale .
Ca urmare , data fiind importanta deosebita a raspunsului sistemului mecanic excitat prin semnale armonice , in cele ce urmeaza se prezinta in maniera clasica modul de obtinere a raspusului fortat al sistemului mecanic descris matematic prin diverse forme particulare in care elementele matricei F(t) sunt functii armonice de timp avand aceasi perioada .
Sistemul mecanic monovariabil
Fie ![]() rel 37
rel 37
marimea de intrare a sistemului mecanic descris de ecuatia :
![]() rel 38
rel 38
Solutia particulara a acestei ecuatii diferentiale este de forma:
![]() rel 39
rel 39
Egaland coeficienti termenilor in
sin ![]() si cos
si cos ![]() din ambii membri ai ecuatiei astfel obtinute
se ajunge la un sistem de doua ecuatii ,
din care rezulta :
din ambii membri ai ecuatiei astfel obtinute
se ajunge la un sistem de doua ecuatii ,
din care rezulta :
 rel 40
rel 40
Reprezentarea grafica a functiilor
![]() este prezentata in figura care urmeaza :
este prezentata in figura care urmeaza :
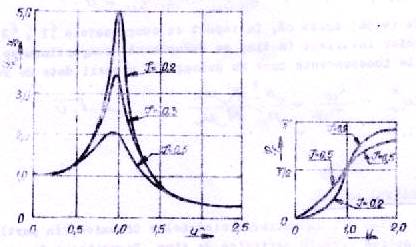 fig 3
fig 3
Dupa cum se observa , atunci cand
pulsatia ω a fortei perturbatoare devine egala cu pulsatia proprie ωn amplitudinea ![]() creste foarte mult .
creste foarte mult .
In cazul particular ![]() formulele din relatia 40 capata formele :
formulele din relatia 40 capata formele :
 rel 41
rel 41
care arata ca , daca sistemele se afla la rezonanta ![]() amplitudinea
amplitudinea ![]() ,asa cum se observa din figura 4 .
,asa cum se observa din figura 4 .
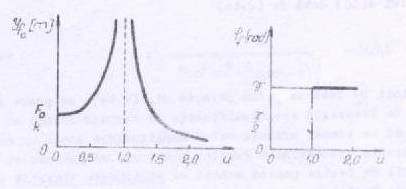 fig 4
fig 4
In asemena conditii , ca urmare a
fortelor si momentelor mari de forma ![]() , respectiv
, respectiv ![]() precizia suprafetei generate prin aschiere
devine necorespunzatoare , elementele care intra in componenta structurii elastice capata uzuri mari .
precizia suprafetei generate prin aschiere
devine necorespunzatoare , elementele care intra in componenta structurii elastice capata uzuri mari .
Functia de transfer in frecventa a sistemului descris de relatia 20 poate fi pusa intr-una din formulele :
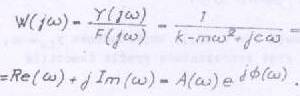 rel 42
rel 42
Comparand expresia lui A(ω) cu cea a amplitudinii ![]() se poate spune ca functia de transfer in
frecventa are semnificatia de raspuns fortat al sistemului mecanic excitat cu
un semnal armonic avand amplitudinea egala cu unitatea .
se poate spune ca functia de transfer in
frecventa are semnificatia de raspuns fortat al sistemului mecanic excitat cu
un semnal armonic avand amplitudinea egala cu unitatea .
Raportul dintre transformarea
Fourier a marimii de intrare si transformata Fourier a marimii de iesire poarta numele de rigiditate dinamica si se noteaza cu ![]()
Tinand cont de relatia 42 rezulta :
 rel 43
rel 43
Iar inversul rigiditatii dinamice se numeste cedare dinamica si este prezentata in relatia:
![]() rel 44
rel 44
Sistemul mecanic multivariabil .
Principiul amortizorului dinamic simplu
Raspunsul sistemului mecanic se poate obtine cu ajutorul uneia din procedurile dezvoltate pentru sistemele dinamice liniare invariante in timp .
In cazul particular al sistemului mecanic fara amortizare , se scrie
![]() rel 45
rel 45
Iar F are forma :
 rel 46
rel 46
Componenta
fortata ![]() a raspunsului este :
a raspunsului este :
 rel 47
rel 47
Pentru determinarea amplitudinilor
![]() se pune conditia ca relatia 47
se pune conditia ca relatia 47
![]() rel 48
rel 48
Deoarece
cos ![]() din relatia 48 rezulta ecuatia matriceala :
din relatia 48 rezulta ecuatia matriceala :
![]() rel 49
rel 49
Inmultind
relatia 49 la stanga cu matricea inversa ![]() rezulta :
rezulta :
![]() rel 50
rel 50
In cazul sistemului mecanic
descris de relatia 11 se folosesc acelea
de matrice a rigiditatilor mecanice ![]() respective de matrice a cedarilor dinamice
respective de matrice a cedarilor dinamice ![]()
Aceste matrici au formele :
![]() rel 51
rel 51
Cu noutatile din figura de mai jos ecuatiile de miscare ale maselor m si m sunt :
 rel 52
rel 52
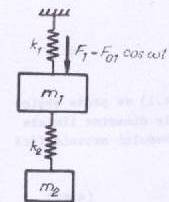 fig 5
fig 5
Sistemul cu un grad de libertate avand masa m si constanta elastica notata prin k se afla la rezonanta daca :
![]() rel 53
rel 53
Pe de alta parte amplitudinea ![]() devine egala cu zero atunci cand :
devine egala cu zero atunci cand :
![]() rel 54
rel 54
adica atunci cand pulsatia fortei perturbatoare devine egala cu pulsatia proprie a sistemului cu un grad de libertate avand parametrii m2 si k .
3.2 Expresia raspunsului total
Dintre metodele folosite pentru determinarea raspunsului sistemelor dinamice descrise prin ecuatii de forma relatiei 10, in cele ce urmeaza se prezinta aceea bazata pe ecuatiile de stare.
Asa cum s-a aratat, daca drept stare se alege faza sistemului,atunci matricele care apar in ecuatiile de stare :
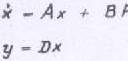 rel 55
rel 55
ale sistemului mecanic cu ecuatia de miscare a 10 au formele:
![]() rel 56
rel 56
Aplicand primei ecuatii din relatia 55 transformarea Laplace in conditiile initiale se obtine:
![]() rel 57
rel 57
Unde prin E s-a notat matricea unitate de tipul ![]() , iar :
, iar :

rel 58
inmultind la stanga ecuatia din relatia 57 cu matricea inversa
![]() se obtine :
se obtine :
![]() rel 59
rel 59
Transformata Laplace inverse a
matricei ![]() poarta denumirea de matrice de tranzitie si se noteaza cu
poarta denumirea de matrice de tranzitie si se noteaza cu ![]() .
.
Tinand cont de calculu transformatei Laplace a produsului de convulatie din relatia 59 rezulta :
 rel 60
rel 60
Introducand relatia 60 in ecuatiile de stare din relatia 55 raspunsul sistemului descris de relatia 10 se scrie :
 rel 61
rel 61
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1531
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved