| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
SUB1: Structura mecanismelor (element cinematic, cupla cinematica, lant cinematic definitie, clasificare, exemple)
Element cinematic (EC)= corp natural care face parte dintr-un mecanism si are rolul de a transmite miscarea si sarcina.
Clasificare:
j=rangul unui EC (arata cate legaturi poate sa realizeze un EC)
Dupa rang, EC se clasifica in :
j=2 (EC binare)
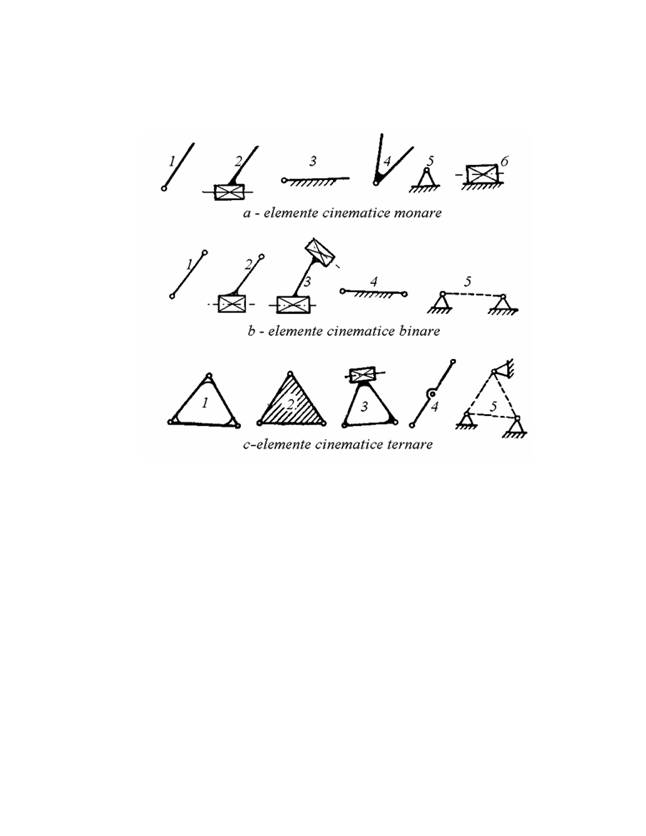 j≥2 EC
compuse j=3 (EC ternare)
j≥2 EC
compuse j=3 (EC ternare)j>3 (EC polinare
OBS: 1. Reprezentarea conventionala a elementelor cinematice este data in stasul 1543.
2. Pe schemele cinematice ale mecanismelor EC se noteaza cu cifre arabe de la 0 la n. Cu cifra 0 se noteaza elementul cinematic fix (batiu)
Cupla cinematica (CC)=este legatura dintre 2 sau mai multe EC.
Clasificarea CC :
a) dpdv constructiv : CC inchise (la care contactul dintre EC este permanent fig.1)
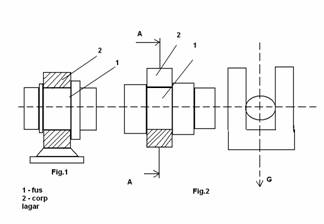 CC deschise (la care contactul dintre EC se
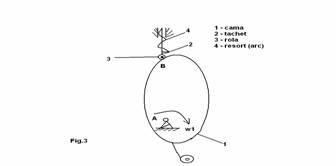
face datorita unei forte de greutate fig.2 sau datorita unei forte elastice
ex.la mecanismul cu cama din fig.3)
CC deschise (la care contactul dintre EC se
face datorita unei forte de greutate fig.2 sau datorita unei forte elastice
ex.la mecanismul cu cama din fig.3)
b) dpdv cinematic: CC plane (permit miscarea EC in plan sau in plane paralele fig.4,5)
CC spatiale (permit miscarea EC in spatiu ex: cupla sferica fig6, cupla elicoidala fig.7)
c)dpdv geometric: CC inferioare (la care contactul dintre EC se face pe o suprafata care poate fi plana, cilindrica, elicoidala, sferica)
CC superioare (la care contactul dintre EC se face pe o linie sau intr-un pct ex: la angrenarea a 2 roti dintate cu dinti drepti)
d) dpdv structural cuplele se impart in 5 clase. Clasa unei cuple este data de numarul conditiilor de legatura(m) : m=6-L; L nr.gradelor de libertate (plan L=3; spatiu L=6-3 rotatii, 3 translatii)
Ex. de cupla de clasa 1 (o sfera pe un plan)
de cupla de clasa 2 (un clindur pe un plan)
de cupla de clasa 3 (cupla sferica/un corp paralelipipedic pe un plan)
de cupla de clasa 4 (un cilindru in alt cilindru)
de cupla de clasa 5 (toate cuplele de translatie si rotatie sunt cuple de clasa 5)
OBS: Pe schema cinematica a unui mecanism, CC se noteaza cu litere mari de la A la Z.
Lantul cinematic(LC)=este o succesiune de EC legate intre ele prin CC. Caracteristica fundamentala a unui LC este aceea ca are toate EC mobile.
Clasificare:
a) dpdv constructiv putem intalni lanturi simple, complexe, deschise, inchise
b) dpdv cinematic LC plane, spatiale
c) dpdv functional LC determinate (Desmodrom=drum legat), LC nedeterminate (Nedesmodrom)
LC Desmodrom este lantul care ptr o pozitie data a EC conducator celelalte elemente ale lantului ocupa pozitii determintate (unice) ex:lantul patrulater articulat.
LC Nedesmodrom este lantul care ptr o pozitie data a EC conducator celelalte elemente ale lantului pot ocupa o infinitate de pozitii ex:lantul patrulater.
OBS:Desmodromia unui LC depinde de numarul EC, de numarul CC si de clasa lor.
Formula structurala a LC Face legatura dintre e, m si ∑mCm si ne permite sa determinam numarul gradelor de libertate ale lantului :
L=6e ∑mCm , e=numarul total de EC ale lantului (cele fixe + mobile)
e=n+1, n numarul de EC mobile
1 EC fix / batiul
m=numarul conditiilor de legatura
Cm=numarul cuplelor de la clasa 1 pana la clasa 5
In plan relatia devine: L3=3e2C5C4
SUB2: Structura mecanismelor (mecanism, grad de mobilitate, echivalarea CC superioare plane)
Mecanism=este un LC Desmodrom inchis al carui grad de mobilitate ne indica numarul EC conducatoare ale mecanismukui
Gradul de mobilitate se noteaza cu M=6n∑mCm (suma de la m=1 la 5). Daca notam cu litera f numarul de restrictii de functionare impus EC ale mecanismelor relatia devine : M=6(nf) ∑(mf)Cm (suma de la m=1+f la 5) , f familia mecanismului
Ptr mecanisme plane f=3: M3=3n2C5C4
Determinarea gradului de mobilitate al unui mecanism este absolut necesar deoarece el ne indica daca mecanismul functioneaza sau nu.
M>0 : mecanismul funtioneaza
M≤0 : mecanismul nu functioneaza
Gradul de mobilitate ne indica numarul EC conducatoare ale mecanismului
Echivalarea CC superioare la mecanismele plane : Ptr studiul Desmodrom so a mobilitatii unui mecanism plan, CC superioare (de clasa 4 C4) se inlocuiesc cu cuple inferioare (C5). Mecanismul obtinut in urma acestei operatii se numeste mecanism echivalent. La echivalarea CC superioare cu cuple inferioare trebuiesc indeplinite 3 conditii:
Se pleaca de la gradul de mobilitate al unui mecanism plan:M3=3n2C5C4
Cupla superioara C4 se inlocuieste prin introducerea a ne EC C5e CC => gradul de mobilitate al mecanismului echivalent : M3e=3(n+ne) 2(C5+C5e)
Conform primei conditii => M3=M3e =>3n2C5C4=3(n+ne)2C52C5e => C5e= (3ne+C4)/2
Ptr ne=1 si C4=1 => C5e=2 , deci o cupla superioara C4 este echivalenta cu un EC cu 2 cuple inferioare (C5). Cuplele inferioare pot fi : de rotatie (fig.a), de translatie si una de rotatie (fig.b). Daca h=0 => un EC cu 2 cuple suprapuse de C5 (fig.c)
SUB3: Elemente cinematice pasive, cuple cinematice pasive, articulatii multiple
EC de prisos/pasiv are urmatoarele roluri: de a consolida mecanismul, de a reduce frecarea, de a evita blocarea mecanismului.
Ex:
In fig.1 si 2 EC 4 are rolul de a consolida mecanismul. In fig.3 rola 3, in timpul functionarii mecanismului se roteste in jurul axei sale fara sa influenteze miscarea mecanismului, ea are rolul de a inlocui frecarea de alunecare cu o frecare de rostogolire (are rolul de a reduce frecarea).
OBS:La stabilirea gradului de mobilitate M EC pasive nu se introduc in calcul.
CC de prisos/pasiva are rolul de a consolida mecanismul.
Ex: la mecanismul de schetting
In aceasta schema F sau G are rolul de a recidiza mecanismul.
OBS:La stabilirea gradului de mobilitate CC pasive nu se introduc in calcul.
Articulatii multiple: O articulatie multipla este formata dintr-un ax pe care sunt montate 2 sau mai multe EC formand in final o multicupla. Ordinul de multiplicare al unei multicuple se noteaza cu p=i1, unde i reprezinta numarul EC concurente pe ax.
SUB4: Clasificarea structurala a mecanismelor
A fost facuta de cercetatorii Assur si Artolevski care au impartit mecanismul in grupe cinematice.
Grupa cinematica este o insiruire de elemente si cuple cinematice care formeaza LC al caror grad de mobilitate este nul (M=0). Cele mai importante grupe cinematice intalnite in practica sunt: diada, triada, tetrada/
Clasa unei grupe cinematice este data fie de EC de rang cel mai mare (j maxim) in cazul cand mecanismul nu contine contururi inchise, fie de numarul cuplelor ce marginesc un contur inchis. Clasa unei grupe cinematice se noteaza cu cifre romane.
Ordinul unei grupe cinematice este dat de numarul CC exterioare libere. Ordinul se noteaza cu cifre arabe.
Clasificarea grupelor cinematice: Putem intalni:
 grupe cinematice de
clasa II (DIADA ex: diada de aspect 1 - RRR, de aspect 2 - RRT, de
aspect 3 - RTR, de aspect 4 - TRT, de aspect 5 - RTT)
grupe cinematice de
clasa II (DIADA ex: diada de aspect 1 - RRR, de aspect 2 - RRT, de
aspect 3 - RTR, de aspect 4 - TRT, de aspect 5 - RTT)
OBS: Ptr toate aceste grupe cinematice, calcului cinematic si dinamic este gata facut in literatura de specialitate (carti de mecanica, carti de mecanism, calcul dinamic, determinarea fortelor de inertie).
Bazat pe principiul lui Assure, daca la un MF se adauga (se cupleaza) unul sau mai multe grupe cinematice se formeaza un mecanism.
Ex1:
Ex2:
Ex3:
OBS: Clasa si ordinul unui mecanism este data de clasa si ordinul celei mai mari grupe cinematice pe care acesta il contine.
SUB5: Distributia vitezelor si acceleratiilor ptr un element aflat in miscare de translatie, translatie circulara, miscare de rotatie
SUB6: Determinarea traiectoriilor, vitezelor si acceleratiilor prin metoda contururilor
SUB7: Fortele care actioneaza asupra mecanismelor
1.Forte si momente exterioare (sarcini) : in cadrul acestora intra :
a) Fm si Mm (forte si momente motoare) actioneaza asupra EC conducator 1 in sensul miscarii suportului vectorului Fm si al suportului viteza vA, formand un unghi mai mic de 90˚. Produce un lucru mecanic motor >0 (Lm>0). Exemple de Fm : forta de presiune a fluidelor, forta elastica din resoarte (arcuri), forta electromagnetica daca e vorba de partea electrica.
b) Fr si Mr de rezistenta utila (forte tehnologice) actioneaza asupra EC conducator 1 in sens contrar miscarii. Intre forta rezistenta Fr si suportul vectorului viteza vA, formandu-se un unghi mai mare de 90˚. Produce un lucru mecanic rezistent <0 (Lr<0). Exemple de forte de rezistenta utila : sarcina/forta de ridicare a macaralei, fortele care i-au nastere in cutitul de strung atunci cand se prelucreaza o piesa prin aschiere.
c) Forte de greutate iau nastere in centrul de greutate al EC fiind orientate tot timpul vertical in jos. Ele produc un lucru mecanic nul.
d) Forte si momente de rezistenta fortele si momentele de frecare Ff si Mf; fortele de rezistenta ale mediului in care lucreaza mecanismul
e) Fortele si momentele de inertie Fi si Mi acestea sunt de natura masica si se datoreaza miscarii EC.
2.Forte si momente interioare/eforturile iau nastere in sectiunea EC si se datoresc fortelor si momentelor exterioare. Pe un ciclu de functionare nu produc si nici nu consuma energie.
3.Forte si momente de legatura/reactiuni iau nastere in CC, ele datorandu-se fortelor si momentelor exterioare. Pe un ciclu de functionare nu produc si nici nu consuma energie.
SUB8: Determinarea fortelor de inertie prin metoda reducerii la un torsor unic
Metoda reducerii la un torsor unic consta in :
centrul
de greutate al acestuia la un torsor (σG) si care are 2
componente :
σG
: Fi vector= - mi aGi vector
Mi vector= - Jgi εi vector
Mi masa EC
aGi acceleratia centrului de greutate a elementului i
εi viteza unghiulara
JGi momentul de inertie masic
Torsorul de inertie σiG prezinta urmatoarele particularitati :
a) ptr EC aflat in miscare de translatie σiG : FiG vector= - m aG vector
b) ptr un element aflat in miscare de rotatie cand axa de rotatie trece prin centrul de greutate al EC daca miscarea EC este uniforma : MiG vector= 0
daca miscarea EC este variabila : Mig
vector =/ 0; cand axa de rotatie nu trece prin centrul de greutate al EC daca miscarea EC este uniforma MiG vector=/ 0
daca miscarea EC este variabila
OBS! Ε vector= dw vector/dt, deci daca nu cunoastem functia w in functie de t nu putem determina pe w=w(t)-> Mig vector.
Ptr rezolvarea problemei se determina o forta de inertie rezultanta Fi vector care sa aiba acelasi efect cu torsorul de inertie σiG vector.
a) Ptr un EC aflat in miscare de rotatie, Fi este tot timpul paralela cu Fig vector si are punctul de aplicatie in pctul K numit centru de oscilatie. (desen)
Pozitia centrului de oscilatie: GP vector=d; Miε= Fi d => d= Miε/Fi
ΔGKP : sin φ=GP/GK=d/GK=> GK=d/ sin φ=Mi/Fi sin φ
Mi= - JG ε; Fi= - m aG; ε=aGt(t e la putere)/aG; aGt(t e la putere)=a sin φ
GK= Mi/Fi sin φ= - JG ε / - m aG sin φ= - JG aGt (t e la putere)/ - m aG OG sin φ = JG aG sin φ / m aG sin φ OG= JG/m OG; iG2(2 e la putere)= JG/m
SUB9: Determinarea fortelor de inertie prin metoda concentrarii maselor
Se considera un corp care are o miscare plana a carei masa m este uniform distribuita. (desen)
Sa facem concentrarea acestei mase m in n mase concentrate.
Conditii: I Fi vector=Fi vector
II Mi vector=Mi vector
Fi vector= - maG vector; Fi vector= - aG(m1+m2+m3), unde Fi si Mi reprezinta fortele respectiv momentele de inertie produse de masa m uniform distribuita. Fi si Mi reprezinta fortele, respectiv momentele de inertie produse de cele n mase concentrate.
Ptr ca cele n mase concentrate sa produca aceasi forta de inertie Fi indiferent de miscare, trebuie ca centrul lor de greutate G sa ramana tot timpul in G (G identic cu G). Trebuie indeplinita conditia I : maG vector=aG vector (m1+m2+.+mn)
m=m1+m2++mn (1)
aG vector=aG vector adica ∑mi*ri vector = 0 (2) =>
m1x1+m2x2++mnxn=0(2)
m1y1+m2y2++mnyn=0
Pentru ca cele n mase concentrate sa produca acelasi moment de inertie Mi indiferent de miscare trebuie ca centrul lor de greutate G sa ramana tot timpul in G, adica trebuie indeplinitia conditia II
Mi vector=Mi vector => JGi=JGi (3)
JGi=m1r1+m2r2++mnrn (3)
Jgi=m1(x1+y1)+m2(x2+y2)++mn(xn+yn) (3)
In concluzie, ecuatiile (1) si (2) exprima conditia de concentrare maxima, concentratie care este folosita la concentrarea statica a maselor aflate in miscare de rotatie si translatie uniforma (viteza ct).
Ecuatiile (1), (2) si (3) exprima conditia de concentrare dinamica a maselor, concentrare care se aplica EC aflate in miscare variabila (vitezele diferite de ct).
SUB10: Reactiunile din cupla de rotatie, translatie, cupla superioara
a) Din cupla de rotatie: Transmiterea sarcinilor de la EC i la EC j se face prin presiuni radiale a caror rezultanta Rij vector= - Rji vector, care trece prin centrul articulatiei si al carui pct de aplicatie si modul este necunoscut. Deci, o cupla de rotatie introduce in calcul 2 necunoscute scalare: pctul de aplicatie al reactiunii, modulul reactiunii
b) Din cupla de translatie: Transmiterea sarcinilor de la EC i la EC j se face prin presiuni perpendiculare pe supr.de contact a caror rezultanta Rij vector= - Rji vector, al carui pct de aplicatie si modul este necunoscut. Deci, o cupla de translatie introduce in calcul 2 necunoscute scalare: pctul de aplicatie al reactiunii, modulul reactiunii (marimea)
c) Ptr cupla superioara: Pe directia normalei nn ia nastere datorita sarcinilor reactinuile Rij vector= - Rji vector, al caror pct de aplicatie se afla in A (la contactul dintre cele 2 EC i si j). Deci o cupla superioara introduce in calcul o singura necunoscuta scalara: modulul reactiunii
SUB11: Algoritmul de calcul al reactiunii din cuple
a) se stabilesc sarcinile care actioneaza asupra EC ale mecanismului
b) se imparte mecanismul in grupe cinematice
c) calculul reactiunilor se incepe cu grupa cinematica cea mai indepartata (ultima grupa cinematica)
d) se introduc in cuple reactiunile prin componentele lor : componentele normale R12 n, R32 n sunt tot timpul || cu EC; componentele tangentiale R12T, R32 T sunt perpendiculare pe EC
e) se scriu ecuatiile
analitic
SUB12: Determinarea reactiunilor din cuple prin metde analitice metoda solidificarii si a echilibrului partilor
Teorema solidificarii: Daca un corp solid care face parte dintr-un sistem este in echilibru atunci intreg sistemul este in echilibru.
Teorema echilibrului partilor : Daca un sistem de corpuri solide este in
echilibru atunci orice subsistem al sau este in echilibru.Daca pe langa fortele
exterioare care incarca subsistemul se introduc si fortele de legatura.
Metoda consta in :
SUB13: Frecarea in cuple in cupla de translatie, de rotatie
Frecarea este un fenomen complex de natura molecularo-mecanico-energetica care ia nastere intre 2 suprafete in contact aflate in miscare relativa sub actiunea unei forte normale. Stiinta care se ocupa cu studiul frecarii s.n. tribologie.
In tehnica, frecarea poate fi benefica sau de cele mai multe ori daunatoare. Benefica in cazul ambreiajelor, sistemelor de franare, asamblarilor realizate prin presare. Daunatoare in cazul lagarelor. In tehnica, frecarea poate fi: uscata, limita, mixta, fluida.
Frecarea uscata se caract.prin aceea ca intre suprafetele de contact aflate in miscare relativa nu se afla niciun fel de lubrifiant. Acest regim de frecare se poate realiza numai in conditii de laborator.
Frecarea limita se caract.prin aceea ca
intre suprafetele de contact aflate in miscare relativa se afla un strat de
lubrifiant subtire cuprins intre 10![]() - 10 m
puternic ancorate de cele 2 suprafete. Acest regim scade frecarea de 2-3 ori,
iar uzura de cateva sute de ori.
- 10 m
puternic ancorate de cele 2 suprafete. Acest regim scade frecarea de 2-3 ori,
iar uzura de cateva sute de ori.
Frecarea mixta se produce intre 2 spurafete de contact aflate in miscare relativa intre care se interpune un strat de lubrifiant care in timpul functionarii se rupe si se reface existand si contacte directe intre suprafete. Acest regim de frecare il intalnim la pornirea si oprirea unei masini.
Frecarea fluida se produce intre 2 suprafete de contact aflate in miscare relativa intre care se interpune un strat de lubrifiant continuu si portant , a carui grosime este mai mare decat inaltimea rugozitatilor celor 2 suprafete. Acest regim de frecare scade drastic frecarea iar uzura este practic nula.
Frecarea in cupla de translatie: (desen)Cupla de translatie se compune dintr-o suprafata plana (1) pe care aluneca cu viteza v vector un corp paralelipipedic (2). F vector este rezultanta fortelor exterioare/sarcini.(F Fn vector = F vector cos α; Ft vector = F vector sin α); R vector=T vector + N vector; |T vector|= |N vector|, unde - coeficientul de frecare; =tg φ , φ unghiul de frecare.
Exista 3 situatii : 1. α > φ; Ft vector > T vector; a vector= (Ft vector T vector) / m. In aceasta situatie cupla functioneaza.
2. α = φ Ft vector=T vector In aceasta situatie cupla este in echilibru
3. α < φ In aceasta situatie cupla nu functioneaza (este blocata)
In concluzie, ptr ca cupla de translatie sa functioneze trebuie ca rezultanta fortelor exterioare F vector sa treaca tot timpul prin afara conului de frecare.
Frecarea in cupla de rotatie :
(desen) O cupla de rotatie se compune din fusul (1) de raza r si cuzinetul (2).
In fig.a fusul 1 se afla in repaus, sarcina F vector= N vector => nu avem
frecare. In fig.b fusul 1 se afla in miscare; in sens contrar acestei miscari
ia nastere forta de frecare T vector. Fusul are tendinta de a urca pe peretele
cuzinetului. De la inceput el se afla in A, la sfarsit el se afla in B, arcul
AB care se formeaza este in fctie de coeficientul de frecare AB (arc) = f().
Mf=r T ; R vector = T vector + N vector R este tot timpul egala, paralela si de sens contrar cu sarcina F care incarca fusul.
cos φ= N/R=N/F => N=F cos φ
T= N= F cos φ = sin φ F cos φ / cos φ = F sin φ
= tg φ= sin φ / cos φ; r sin φ= ρ; ρ raza cercului de frecare => Mf=r F sin φ; Mf= ρ F = r F; sin φ aproximativ egal
SUB14: Energia cinetica a masinii; modele dinamice; moment de inertie redus; masa redusa
Energia cinetica a masinii: E-E0=LM-LR (1), unde E energ.cinetica a masinii la timpul t, t timpul final, E0 energia cinetica a masinii la timpul t0 (timpul initial) LM lucrul mecanic produs de fortele motoare in intervalul (t-t0); LR lucrul mecanic al fortelor de rezistenta activa (tehnologica) in intervalul de timp (t-t0)
Ptr un EC notat cu j care apartine unui mecanism aflat in miscare plan paralela, energia cinetica este data de relatia (2) :
Ej = [mj vj2 (2 e la putere)] / 2 + [JGj wj2(2 e la putere)] / 2
Miscarea de translatie miscarea de rotatie
mj masa elementului j
vGj viteza centrului de greutate a elem.j
JGj momentul de inertie masic
Wj viteza unghiulara a elem.j
Ptr un intreg mecanism / un ansamblu de mecanisme, energia cinetica se poate determina cu relatia (3) : E= suma de la j=1 la n din Ej = suma de la j=1 la n din mj vj la patrat + suma de la j=1 la n din JGj wj la patrat
Relatia (3) prezinta dificultati d.p.d.v. al calcului matematic deoarece contine 2n termeni, unde n reprezinta numarul EC al masinii sau al mecanismului. Ptr.rezolvarea problemei se inlocuieste masina motoare (EC conducator) cu un model dinamic, model care trebuie sa indeplineasca 2 conditii : sa aiba o miscare identica cu miscarea elementului initial al masinii; sa aiba energia cinetica egala cu energia totala a masinii in orice moment al miscarii. Aceasta operatie de inlocuire a masinii motoare cu un model dinamic poarta numele de reducerea maselor masinii. Drept element de reducere se ia elementul initial. Modelele dinamice care inlocuiesc masina reala pot fi : un disc aflat in miscare de rotatie pe axul elementului initial (de reducere) caracterizat de momentul de inertie J redus, o masa punctiforma aflata in miscare de rotatie sau in miscare de translatie numita masa redusa (m redA) plasata in articulatia A a elementului initial de reducere.
Ptr.primul model : E red1= Jred1 w1 la patrat= E= suma de la j=1 la n din mj vGj la patrat + suma de la j=1 la n din JGj wj la patrat (4). Jred1=suma de la j=1 la n din mj vGj la patrat/ w1 la patrat + suma de la j=1 la n din Jgj wj la patrat / w1 la patrat (5)
Momentul de inertie redus (J red1) este un moment fictiv a unui disc care se roteste cu viteza unghiulara a elementului conducator, a carei energie este egala cu energia mecanismului sau a masinii reale.
Ptr.al doilea model : E red2= mredA vA la patrat=E= suma de la j=1 la n din mk vaj la patrat + suma de la j=1 la n din JGj wj la patrat (6) mredA=suma de la j=1 la n din mj vaj la patrat / vA la patrat + suma de la j=1 la n JGj wj la patrat / vA la patrat (7)
Masa redusa (mredA) este o masa fictiva plasata in articulatia A a elementului conducator, a carei energie este egala cu energia mecanismului sau a masinii reale.
Relatia de legatura dintre Jred1 si mredA este data de relatia (8) : Jred1=mredA vA la patrat / w1 la patrat
SUB15: Fazele miscarii masinii; randamentul masinii
(t-to)-> E-E0=LM LR (1) Lru lucrul mecanic al fortelor de
E-E0=LM (Lru+Lrp) (1) rezistenta utila
LRp lucrul mecanic al fortelor de rezistenta pasiva
Tinand cont de modelele dinamice relatia (1) se mai poate scrie si sub forma:
Jred1 w1 la patrat Jred1 w1(0) la patrat = LM-LR
mredA vA la patrat mredA vA(0) la patrat = LM-LR
Pe un ciclu de functionare diferenta LM-LR poate fi : =0, >0, <0
Fazele miscarii masinii sunt date de variatia vitezei unghiulare (w1) a elementului initial (de reducere) in functie de timp. (desen)
a) Faza de pornire caracterizata in aceea ca vit.unghiulara (w1) a
elem.initial (de reducere) creste de la 0 la o valoare medie (w1m) in intervalul de timp tp (timp de pornire). La sfarsitul acestei faze w1 > w1(0) > LM>LR. Ptr micsorarea timpului de pornire (tp) masina se porneste in gol (fara sarcina)
b) Faza de regim aceasta se caracterizeaza prin aceea ca viteza
unghiulara (w1) a elem.initial oscileaza in jurul unei valori medii (w1m) capatand valori maxime (w1max) si valori minime (w1min) pe un ciclu de functionare. La inceputul si sfarsitul fiecarui ciclu w1=w1(0) >LM=LR, w1m=(w1max+w1min) / 2
c) Faza de franare in care viteza unghiulara w1 a elem.initial scade de la
valoarea medie la 0 in timpul tf (timp de franare) ca urmare a incetarii fortei motoare. La sfarsitul acestei faze w1<w1(0) > LM<LR Ptr miscorarea tf masinile sunt prevazute cu sisteme de franare performante.
Bilantul energetic
In faza de regim : LM=LR
LM= Lru + LRp LG Li (6) (LG, Li sunt 0 pe un ciclu de functionare)
Li lucrul mecanic al fortelor de inertie
LG lucrul mecanic al fortelor de greutate
PM= PRu + PRp PG Pi (6) (PG, Pi sunt 0)
η = LRu / LM = LM LRp / LM = 1 LRp / LM<1 (7)
η = PRu / PM < 1 (7)
a) Randamentul masinilor legate in serie (desen):
η = Prun / PM = η1 η2 η3.. ηn (8)
b) Randamentul masinilor legate in paralel (desen):
η= Σ de la i=1 la n din Prui / Σ de la i=1 la n din (Prui / η i) (9)
SUB16: Mecanisme cu cama definitii, clasificari, schema cinematica
Mecanismele cu cama fac parte din categoria mecanismelor cu cuple superioare
(B). Mecanismul este format dintr-un EC conducator profilat numit cama si un EC
condus numit tachet.
Clasificari:
a) dupa suprafata de contact dintre cama si tachet : tachet cu varf,
b) dupa miscarea camei si a tachetului : In fig.1 EC (1) are miscare de translatie si tachetul are miscare de translatie pe verticala. In fig.2 cama are miscare de rotatie iar tachetul miscare de translatie. In fig.3 cama are miscare de rotatie si tachetul miscare de oscilatie
c) dupa curba descrisa de cama : plana(fig.4,5) sau spatiala(fig.6,7)
d) dupa dispunerea profilului camei : cama cu profil dispus la exterior (fig.4,5) si cama cu profil dispus la interior (fig.8,9)
e) dupa : cama cu profil liniar SB=A φ, A este o constanta, φ este unghiul de rotatie a camei; cama cu profil parabolic SB= A φ la patrat; cama cu porfil sinusoidal SB= A+Bsin Cφ; cama cu profil cosinusoidal SB= A+Bcos Cφ; cama cu profil polinomial
f) d.p.d.v constructiv putem avea : came dintr-o bucata; came sectionate
SUB19: Mecanisme cu roti dintate definitie, avantaje, dezavantaje, clasificari
Agregajul-cel mai simplu mecanism format din cel putin 2 roti dintate care au rolul de a transmite miscarea de rotatie de la arborele conducator la arboreal condus.
Roata dintata-elem cinematic care are la periferia ei dinti dispusi in mod regulat pe o supraf de revolutie. Este montata pe arboreal conducator este monobloc si s.n. pinion.
Spre deosebire de celelalte mecanisme, mecanismul cu roti dintate prez o serie de avantaje si dezavantaje:
Avantaje: realiz un raport de translatie constant ( i=ct) ; transmite puteri mari la turatii mari; realiz un gabarit mic; au o buna siguranta in functionare ; randament bun
Dezavantaje: la turatii mici produce zgomot; necesita o executie si un montaj mai prcis ( cost ridicat) ; nu poate realize intreaga gama de rapoarte de transmitere deoarece rotile dintate treb sa aiba un nr intreg de dinti.
Clasif:
a)dupa pozitia axelor (a arborelui)-angrenaje cu axe paralele, angrenaje cilindrice, cu axe concurente, angrenaj conic. Ang cu axe incrucisate (ang mercat )
b)dupa directia dintilor: roti cu dinti : drepti, inclinati, in V, in W, curbi.
c) dupa profilul danturii : roti cu profil evolventa, roti in arc de cerc, roti cicloidale, alte curbe.
d)dupa forma rotilor : roti cilindrice, roti melcate, roti conice.
e) dupa dispunerea danturii: roti cu dantura dispusa la exterior, .si la interior.
f) dupa raportul de transmitere: i>1 reductoare; i<1 multiplicatoare .
SUB20: Legea fundamentala a angrenarii
Legea fundamentala a angrenarii: consideram 2 roti dintate cu centrele in O1 si O2 ale caror profile sunt in contact in pctul M.
Plecand de la observatia ca vitezele pctelor suprapuse pe normala comuna m-M sunt =, putem sa scriem vM1cosβ1= vM2cosβ2.
Demonstratie.caiet
Pt ca 2 profile sa poata realize un raport de transmitere ct treb ca normala comuna n-n` sa treaca tot timpul printr-un pct fix C-numit polul angrenarii.
Daca notam cu rω1, r ω2 razele cercurilor de rostogolire cω1, cω2 cu n1 si n2, turatiile celor 2 roti si cu z1 si z2 nr de dinti a celor 2 roti dintate, legea fundamentala a angrenarii: i12= ω1/ ω2=n1/n2= rω1/ r ω2=+- z2/z1=ct
Obs :
SUB21: Curbele folosite pentru constructia profilelor danturii; evolventa
Acestea treb sa respecte legea fundam a angrenarii . curbele care trec aceasta lege sunt curbele ciclice: evolventa-cea mai folosita in tehnica, datorita avantajelor pe care le prez, cicloida, epicicloida , hipocicloida.
Avantaje: constructie si executie simpla , asigura interschimbabilitatea, micile erori de executie si montaj nu influeneteaza functionarea angrenajului.
Curba evolventa:
Evolventa : curba plana descrisa de un pct M0 care apartine dreptei generatoare γ care se rostogoleste fara alunecare pe cercul de baza de raza rb. Cand dreapta generatoare Γgamma trece prin polul angrenarii C ea ocupa pozitia N-N si devine tangenta la cercul de baza in pctul A.
Demonstratie caiet.
Valori ale acestei fctii sunt date in literature de specialitate de la 20˚-40˚
SUB22: Elementele geometrice ale rotilor dintate cilindrice cu dinti drepti
SUB23: Cremaliera de referinta; prelucrarea danturii rotilor dintate
Forma si dimensiunea danturii sunt def de cremaliera de referinta a caror elem geometrice sunt standardizate in STAS. Daca 1 din rotile angrenajului are raza cercului de baza infinit de mare, cercul de divizare si cercul de baza se transf intr-o linie dreapta numita linie de referinta, iar roata se transf intr-o cremaliera.
Cremaliera generative este negativul cremalierei de referinta.
α0=20˚-unghiul profilului de referinta.
h0a*= hoa /m =1mm- inaltimea capului de referinta
c0*= c0/m= 0.25 mm-jocul la capul profilului de referinta
h0= h0f + h0a- inaltimea profilului de referinta
p0=πd/z-pasul pe linia de referinta
m= p0/π= d/z diametrul pe linia de referinta
2 roti dintate pot angrena una cu alta daca ambele pot angrena cu aceeasi cremaliera de referinta.
Cremaliera de ref materializeaza in practica cutitul cu care se taie dantura dintilor.
Prelucrarea danturii se poate face prin 2 metode:
Desen..
SUB24: Interferenta, subtaierea, numarul
minim de dinti
Interferenta-fenomen care se produce in timpul functionarii angrenajului si consta in patrunderea varfurilor rotii mari la baza dintilor rotii mici, producand in aceasta o scobire, care duce la scaderea rezistentei mecanice a acesteia.
Subtaierea fenomen care se produce in timpul prelucrarii danturii rotilor prin rulare (folosind cutitul pieptene) si se manifesta si are aceleasi consecinte ca interferenta.
Pt evitarea subtaierii (interferentei) treb ca z1≥z min; z1-nr de dinti a pinionului.
Desen.
∆NNC: sinα = NC/NC= h0a/r*sinα
h0a=m* h0a* ; r=d/2 => sinα=m * h0a*/ (m*z)/2 *sinα
z=z min= 2 h0a* /sinα*sinα
obs: pt evitarea subtaierii trebuie ca z1≥17dinti.
Se pot folosi si roti cu z1<17dinti, dar in acest caz este absolute necesar sa facem o deplasare de profil a danturii
SUB25: Deplasarea de profil a danturii
SUB26: Gradul de acoperire
A-intrarea in angrenare a unei perechi de dinti
E-iesirea unei perechi de dinti din angrenare
La intrarea in angrenaj in A a unei perechi de dinti, cealalta pereche de dinti care iese din angrenaj trebuie sa fie in B
in care;
![]() , pasul pe cercul de baza.
, pasul pe cercul de baza.
33
![]() ,
,
![]() ,
,
de unde;

Gradul de acoperire ne arata cate perechi de dinti intra la un moment dat in angrenarea astfel ca raportul de transmitere sa ramana constant iar angrenarea sa fie continua (fara socuri, fara vibratii). Cu cat epsilon alfa este mai mare cu atat functionarea unui angrenaj este mai silentioasa.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2040
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved