| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Structuri de reglare
Abordare teoria reglarii
anii '30 - prima metoda sistematica de tratare a problemei legate de reglare - utilizeaza abordarea clasica, dominante fiind tehnicile bazate pe functii de transfer si cele din domeniul frecventa
sfirsitul anilor '50 - "teoria moderna a reglarii" , introducere concept de variabila de stare, se lucreaza mai mult in domeniul timp
prezent - ambele abordari, considerate complementare si egale ca nivel, ultimul tip de abordare e legat de functiile de transfer multivariabile, (SISO fiind un caz particular)
Se considera sistem de reglare - orice sistem care exista cu scopul reglarii sau controlului fluxului de energie, informatii, bani sau altor cantitati, de o maniera stabilita.
Un sistem de reglare este interconectarea mai multor componente sau unitati functionale asfel incit sa se produca un rezultat dorit.
O prima clasificare sisteme de reglare:
sisteme
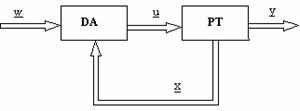
de reglare in circuit deschis (sisteme de conducere figura
sisteme
de reglare in circuit inchis (sisteme de reglare propriu-zise
|
|
|
|
figura
Marimile care intervin au urmatoarea semnificatie:
u = marimea de comanda a procesului tehnic; u = marime de iesire pentru DA, marime de intrare pentru PT, d.p.d.v. sistem de conducere, = marime interna, prin intermediul ei se executa operatia de conducere automata a PT de catre DA.
z = marimea condusa/iesirea de apreciere a procesului; z = marimea de iesire a sistem de conducere, valorile si variatiile reflecta performantele tehnico-economice sistemului de conducere si permite sa se aprecieze satisfacerea dezideratelor tehnologice impuse PT.
y = marimea masurata/iesirea de masura a procesului; y = marime interna a SCCI prin intermediul careia se asigura informarea DA referitoare la privire la starea procesului, y = marime de iesire traductor, marimea masurata de acesta putand fi iesirea de apreciere z sau o alta marime a procesului tehnic. Legatura inversa dintre PT si DA, poarta numele de reactie.
w = marimea de referinta; din punct de vedere functional, w = o marime interna a DA, elaborata de DA / o marime externa a DA, prin intermediul careia se prescrie starea dorita a procesului condus sau regimul de functionare al acestuia; din punct de vedere informational w = in ambele cazuri marime de intrare sistem de conducere.
p = marimea perturbatoare a procesului; p este o marime de intrare pentru PT, se modifica independent de DA, p= o marime de intrare si pentru sistemul de conducere u.
Sistemul din fig.
Sistemul din fig.
 Sistemele de reglare cele mai utilizate sunt sistemele de reglare dupa eroare, a
caror structura este bine cunoscuta. Un
Sistemele de reglare cele mai utilizate sunt sistemele de reglare dupa eroare, a
caror structura este bine cunoscuta. Un
Figura
Semnificatia blocurilor este urmatoarea :
ER - element de referinta, care furnizeaza marimea de prescriere w;
D - element de comparare;
RG - regulator;
EE - element de executie
M - blocul de masura;
PT - proces tehnic condus IT-instalatie tehnica
DA - dispozitivul de automatizare
a - marime de actionare (asimilata cu eroarea de reglare e); a=w r, in functie de reactia pozitiva sau negativa existenta;
m - marime de executie, elaborata de EE.
Regulatorul RG elaboreaza marimea de comanda u pe baza algoritmului de
reglare: ![]() (3.46)
(3.46)
astfel incat ![]() ,
in prezenta perturbatiilor p.
,
in prezenta perturbatiilor p.
Conditia (3.46) expliciteaza semnificatia conducerii dupa eroare in sensul respectarii cat mai fidele de catre marimea reglata y a programului impus prin marimea de referinta w.
Fidelitatea urmaririi de catre marimea y a programului impus este
caracterizata prin performantele uzuale impuse
Principiul reglarii dupa eroare are o deficienta - pentru ca regulatorul sa poata interveni asupra procesului este absolut necesar sa se produca o eroare, iar interventia asupra acesteia este relativ tardiva -> s-au imaginat o serie de structuri care imbunatatesc comportarea celei discutate:
- structura de reglare cu marime masurata auxiliara
(fig.
- structura de reglare cu masurarea perturbatiei (fig.
- structura de reglare cu marime de comanda auxiliara
(fig.
Toate cele trei structuri s-au prezentat simplificat.
 a)
a)
b)
c)
Figura
a) Structura de reglare cu marime de reactie auxiliara
Cu ya s-a notat marimea de reactie
auxiliara, a carei variatie in timp o anticipeaza pe cea a marimii reglate y,
permitand dispozitivului de automatizare DA o actiune mai eficienta asupra
procesului P si imbunatatind stabilitatea
In categoria
b) Structura de reglare cu compensarea perturbatiei
Aceasta categorie se
Dispozitivul de automatizare actioneaza in mare masura pe baza modificarii perturbatiei, neasteptandu-se ca aceasta sa-si manifeste efectul asupra marimii de la iesire.
c) Structura de reglare cu marime de comanda auxiliara
Aceasta categorie de sisteme se utilizeaza in cazul in care procesul este prevazut cu cel putin doua elemente de executie. Prin marimea de comanda principala u este comandat un element de executie, iar prin marimea de comanda auxiliara ua, celalalt element. Marimea ua asigura adaptarea mai rapida a lui y la valoarea prescrisa.
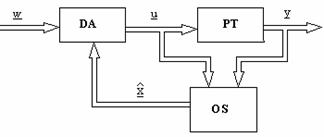
Alta posibilitate de a contracara deficienta sistemelor de reglare dupa eroare consta in realizarea unei reactii dupa stare.
Figura
Marimile care intervin sunt urmatoarele:
u = vectorul marimilor de comanda;
x = vectorul marimilor de stare;
w = vectorul marimilor de intrare;
y = vectorul marimilor de iesire.
Principial, marimea de stare x
contine toate informatiile despre proces. Practic, marimile de stare sunt de
cele mai multe ori nemasurabile in sens direct. In schimb se pot masura
marimile de intrare si de iesire din proces u
si y, si daca procesul este
observabil atunci se poate genera x.
Operatia este realizata de un bloc numit observator
de stare. Marimea furnizata de acesta nu este chiar x, ci doar o estimare a marimii de stare, notata cu ![]() .
.
Figura
Sinteza OS este bazata pe urmatorul principiu: OS contine un model al procesului condus a carei iesire se corecteaza in permanenta prin comparare cu procesul real.
Structura de reglare dupa eroare, ca si cea de reglare dupa stare se considera structuri clasice. Progresele tehnicii de calcul si ale electronicii permit procesarea foarte rapida a semnalelor si s-a ajuns astfel la obtinerea unor strategii de reglare performante bazate pe un volum mare de calcul, numite sisteme de reglare avansate (evoluate).
Motivul principal al aparitiei unor astfel de structuri il reprezinta neliniaritatile procesului condus existente la marea majoritate a acestora. Aceste neliniaritati pot fi in principiu contracarate doar prin modificarea permanenta a algoritmului de reglare in functie de evolutia punctului de functionare al procesului condus. Structurile capabile de o astfel de implementare se numesc structuri adaptive.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1419
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved