| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Momentul de torsiune dezvoltat de motorul cu ardere interna se transmite, prin intermediul transmisiei, la rotile motoare ale autovehiculelor pe roti. Momentul transmis rotii motoare se numeste moment motor sau moment la roata.
Pentru calculul momentului MR transmis la rotile motoare ale autovehiculului se foloseste relatia:
![]() , (3.15)
, (3.15)
in care: M este momentul efectiv al motorului; itr este raportul de transmitere al transmisiei autovehiculului; htr este randamentul transmisiei.
Pentru explicarea autopropulsarii la autovehiculele pe roti, in figura 3.4, este prezentata schema fortelor care actioneaza asupra rotii motoare nedeformabile care ruleaza pe un drum nedeformabil.
 Din partea transmisiei asupra rotii motoare actioneaza momentul MR,
reprezentat in figura prin cuplul de forte (Fo,Fo), care
are bratul egal cu raza dinamica a rotii rd. La interactiunea dintre drum si roata, in
punctul de tangenta al rotii cu drumul, ia nastere reactiunea FR,
forta motoare sau forta la roata.
Valoarea maxima a fortei la roata FRmax se determina din conditia de
aderenta. In axul O al rotii, din partea autovehiculului actioneaza reactiunea
R, care este echilibrata de forta de impingere Fo, cu care are
aceiasi directie. Forta de impingere maxima corespunzatoare cuplului maxim o
notam cu Fomax. Reactiunea R este egala cu suma tuturor fortelor de
rezistenta la inaintarea autovehiculului.
Din partea transmisiei asupra rotii motoare actioneaza momentul MR,
reprezentat in figura prin cuplul de forte (Fo,Fo), care
are bratul egal cu raza dinamica a rotii rd. La interactiunea dintre drum si roata, in
punctul de tangenta al rotii cu drumul, ia nastere reactiunea FR,
forta motoare sau forta la roata.
Valoarea maxima a fortei la roata FRmax se determina din conditia de
aderenta. In axul O al rotii, din partea autovehiculului actioneaza reactiunea
R, care este echilibrata de forta de impingere Fo, cu care are
aceiasi directie. Forta de impingere maxima corespunzatoare cuplului maxim o
notam cu Fomax. Reactiunea R este egala cu suma tuturor fortelor de
rezistenta la inaintarea autovehiculului.
Fig.3.4. Schema fortelor care actioneaza asupra
rotii motoare nedeformabile la deplasarea
pe drum nedeformabil
Asupra rotii motoare mai actioneaza si greutatea repartizata pe roata GR, in care este inclusa si greutatea proprie, aceasta fiind echilibrata de reactiunea normala a drumului ZR.
Din analiza echilibrului de forte pe directia deplasarii, rezulta ca sunt posibile patru cazuri de miscare a rotii, si anume:
R>Fomax, FRmax>Fomax - miscarea este imposibila, motorul cu ardere interna se opreste;
R≥Fomax, FRmax<Fomax - patinare totala;
R≤Fomax, FRmax≥Fomax - rostogolire ideala, fara patinare sau alunecare;
R≤Fomax, FRmax≤Fomax - deplasare cu patinare partiala.
Valoarea fortei Fo sub actiunea careia autovehiculul executa miscarea de translatie se determina pornind de la momentul la roata cu relatia:
![]() (3.16)
(3.16)
sau, tinand seama de relatia 3.15, cu relatia:
![]() (3.17)
(3.17)
In cazul miscarii accelerate (a>0) o parte din energia furnizata de motor este utilizata pentru accelerarea motorului, a pieselor in miscare de rotatie din transmisie si a rotilor motoare. Daca se ia in considerare doar acceleratia unghiulara a motorului si a rotilor motoare , momentul la rotile motoare este diminuat cu valoarea:
![]() (3.18)
(3.18)
unde: DM1 este momentul folosit la accelerarea motorului redus la rotile motoare; DM2 este momentul folosit la accelerarea rotilor motoare.
Pentru calculul momentelor DM1 si DM2 se folosesc relatiile:
![]() (3.19)
(3.19)
unde: Jm este momentul de inertie motorului si al ambreiajului; JR momentul de inertie al unei roti motoare; w este viteza unghiulara a motorului; wR este viteza unghiulara a rotilor motoare.
In cazul miscarii accelerate rezulta urmatoarea relatie de calcul pentru momentul la roata:
![]() (3.15')
(3.15')
iar pentru forta la roata se obtine:
![]() (3.17')
(3.17')
In figura 3.5 este prezentata schema explicativa a autopropulsarii autovehiculelor pe senile.
Fig.3.5. Schema propulsiei la autovehicule pe senile.
Mecanismul de propulsie la autovehiculele pe senile se compune din rotile motoare 1, lantul senilelor 2, rotile de intindere 3, rolele de sprijin 4 si rolele de sustinere 5. Acest mecanism asigura datorita aderentei cu solul crearea fortelor necesare atat pentru realizarea miscarii rectilinii cat si pentru realizarea virajului.
Autopropulsarea autovehiculelor pe senile se realizeaza astfel. Momentul motor MR al rotilor motoare, reprezentat in figura 3.5 prin cuplul de forte (Fo,Fo), tinde sa smulga senila de sub rolele de sprijin ale autovehiculului. Datorita greutatii autovehiculului, care se sprijina pe senile prin intermediul rolelor de sprijin, ia nastere reactiunea FR a solului, care se opune alunecarii senilelor.
Relatia 3.17 pentru determinarea fortei la roata motoare este valabila si pentru autovehiculele pe senile, insa in acest caz prin rd se are in vedere raza circumferintei dinamice a rotilor motoare. Pentru a demonstra acest lucru se utilizeaza schema din figura 3.5. Din aceasta schema se observa ca forta Fo, care actioneaza asupra axului rotii motoare, are o componenta de impingere pe directia miscarii:
![]() , (3.18)
, (3.18)
unde y este unghiul format de latura motoare a senilei cu calea de rulare.
Forta Fo este echilibrata, ca si in cazul autovehiculelor pe roti, de reactiunea din partea drumului FR, adica Fo=FR, daca se neglijeaza pierderile din senile. Rezultanta F a acestor doua forte, da o componenta Fh paralela cu solul care actioneaza in directia miscarii asupra axului rolei de sprijin din spate. In felul acesta, in directia miscarii vor actiona proiectiile orizontale ale fortelor Fo si F. Forta totala de impingere a autovehiculului pe senile este:
![]() (3.19)
(3.19)
Din figura 3.5 rezulta:
![]() (3.20)
(3.20)
deci:
![]() (3.21)
(3.21)
Deci, forta de impingere a autovehiculului pe senile, sub actiunea careia se deplaseaza, nu depinde de valoarea unghiului y . Prin urmare, relatia 3.17, pentru determinarea fortei motoare este valabila atat la autovehiculele pe roti cat si la autovehiculele pe senile.
Momentul efectiv dezvoltat de motor, amplificat cu raportul de transmitere din cutia de viteze, da nastere la un moment reactiv, care influenteaza asupra transmiterii fortei de tractiune si repartitiei greutatii autovehiculului pe roti in plan transversal. Prezenta diferentialului in transmisie, influenteaza repartitia fortei de tractiune prin repartizarea inegala a momentului motor la cele doua roti motoare.
Schema fortelor, momentelor si a reactiunilor care actioneaza asupra unui autovehicul cu doua punti, cu punte motoare spate este prezentata in figura 3.6. In acest caz, reactiunile tangentiale la rotile din fata X1s, pentru roata din stanga si X1d, pentru roata din dreapta sunt fortele de rezistenta la rulare, care se determina la deplasarea uniforma cu relatiile:
![]() , (3.22)
, (3.22)
in care: Z1s si Z1d sunt reactiunile normale la rotile din fata stanga, respectiv dreapta; f este coeficientul de rezistenta la rulare.
Reactiunile tangentiale la rotile din spate (rotile puntii motoare) X2s, pentru roata din stanga si X2d, pentru roata din dreapta, depind de momentul efectiv al motorului Me, rapoartele de transmitere, constructia diferentialului (simplu sau autoblocabil) si de dimensiunile rotilor.
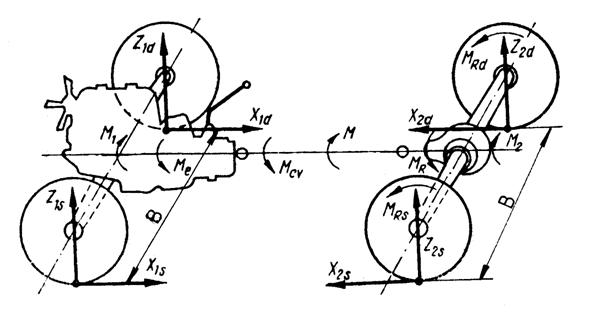
Fig.3.6. Schema fortelor, momentelor si reactiunilor care actioneaza asupra autovehiculului.
Momentul efectiv al motorului Me, se amplifica in cutia de viteze cu raportul de transmitere icv. Daca se neglijeaza randamentul cutiei de viteze expresia momentului Mcv este:
![]() (3.23)
(3.23)
Momentul de torsiune transmis de cutia de viteze Mcv, este amplificat si el in reductorul central cu raportul de transmitere io. Daca se neglijeaza si in acest caz randamentul, expresia momentului MR transmis la rotile motoare este:
![]() . (3.24)
. (3.24)
La deplasarea rectilinie a autovehiculului MR se repartizeaza in mod egal la cele doua roti motoare, iar in cazul deplasarii in curba repartizarea se face functie de frecarile care au loc in diferential. Indiferent de traiectoria miscarii autovehiculului, are loc egalitatea:
![]() (3.25)
(3.25)
in care MRs si MRd sunt momentele repartizare rotii din stanga, respectiv dreapta.
Considerand raportul dintre momentul la roata din stanga MRs si momentul total la puntea motoare MR:
![]() (3.26)
(3.26)
care se numeste coeficientul repartizarii momentului la rotile motoare. Fortele tangentiale de tractiune X2s si X2d repartizate la rotile din stanga, respectiv dreapta se calculeaza cu relatiile:
 (3.27)
(3.27)
unde r este raza dinamica a rotii motoare.
Tinand cont de faptul ca in cazul diferentialelor conice simple, coeficientul de repartizare al momentului l are valori cuprinse intre 0,55 si 0,6, rezulta ca la deplasarea pe traiectorie curba sau in cazul deplasarii pe drumuri cu aderenta diferita pentru rotile stanga, dreapta arborii planetari pot fi incarcati diferit. De acest fapt trebuie sa se tina seama la dimensionarea si verificarea arborilor planetari si la simularea functionarii transmisiei in conditiile mai sus mentionate.
Momentul transmis de cutia de viteze Mcv produce un moment reactiv M egal si de sens contrar cu acesta:
![]() . (3.28)
. (3.28)
Deoarece legatura intre motor si puntile autovehiculului nu este rigida, momentul reactiv M devine un moment exterior in raport cu cele doua punti si se imparte in doua momente reactive M1 si M2, care actioneaza asupra celor doua punti. Considerand ca raportul dintre momentele M1 si M2 este K, rezulta ca:
![]() . (3.29)
. (3.29)
Avand in vedere ca:
![]() (3.30)
(3.30)
din relatiile 3.29 rezulta relatiile de calcul pentru cele doua momente reactive:
![]() (3.31)
(3.31)
Conform schemei din figura 3.6 conditia de echilibru pentru puntea din fata este:
![]() (3.32)
(3.32)
din care inlocuind expresia momentului M1 data de relatia 3.31 se obtine:
![]() (3.32')
(3.32')
unde cu B s-a notat ecartamentul puntii din fata si din spate.
Conditia de echilibru pentru puntea din spate este:
![]() (3.33)
(3.33)
din care inlocuind expresia momentului M2 data de relatia 3.31 si Mcv din 3.28 se obtine:
![]() (3.33')
(3.33')
Analizand relatiile 3.32' si 3.33' rezulta ca:
![]() (3.34)
(3.34)
sau:
![]() (3.34')
(3.34')
Din relatia 3.34 se poate trage concluzia ca roata din dreapta de la puntea din fata este mai incarcata decat cea din stanga, iar roata din stanga de la puntea din spate este mai incarcata decat cea din dreapta. Aceasta diferenta de incarcare radiala trebuie avuta in vedere la determinarea uzurii pneurilor si a sabotilor de frana. Conform relatiei 3.34' rezulta ca suma reactiunilor normale care actioneaza asupra rotilor din stanga este egala cu cea care actioneaza asupra rotilor din dreapta.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 4252
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved