| CATEGORII DOCUMENTE |
| Astronomie | Biofizica | Biologie | Botanica | Carti | Chimie | Copii |
| Educatie civica | Fabule ghicitori | Fizica | Gramatica | Joc | Literatura romana | Logica |
| Matematica | Poezii | Psihologie psihiatrie | Sociologie |
DREAPTA SI PLANUL IN SPATIU
S1 Dreapta in spatiu
Ecuatiile dreptei in spatiu depind de modul in care este determinata dreapta respectiva.
O dreapta in spatiu poate fi determinata de:
a) un punct si un vector director;
b) doua puncte;
c) intersectia a doua plane.
1.1 Dreapta determinata de un punct si un vector director
Consideram o dreapta d care trece prin
punctul M0(x0,y0,z0) si are un vector director ![]() (l,m,n) (fig.S1).
Punctul M(x,y,z) apartine dreptei d daca
si numai daca vectorii
(l,m,n) (fig.S1).
Punctul M(x,y,z) apartine dreptei d daca
si numai daca vectorii ![]() si
si ![]() sunt coliniari. Daca
notam cu
sunt coliniari. Daca
notam cu ![]() si
si ![]() vectorii de pozitie ai
punctelor M si M0 respectiv, adica:
vectorii de pozitie ai
punctelor M si M0 respectiv, adica:
![]() (S1)
(S1)

Fig. S1
avem ![]() =
=![]() si din conditia de coliniaritate a lui
si din conditia de coliniaritate a lui ![]() cu
cu ![]() obtinem ecuatia in V3 a dreptei d,
obtinem ecuatia in V3 a dreptei d,
d: ![]() sau
sau ![]() (S2)
(S2)
numita ecuatia vectoriala a dreptei definita de un punct si un vector director.
Ecuatia vectoriala (S2) este
echivalenta cu trei ecuatii in R3 ce se obtin trecand la proiectiile
pe axe ale vectorilor ![]() si
si ![]() :
:
D: x-x0=tl, y-y0=tm, z-z0=tn, ![]() (S3)
(S3)
numite ecuatiile parametrice ale dreptei d. Aceste ecuatii se pot scrie sub forma urmatoare:
![]() (S4)
(S4)
cu conventia ca daca un numitor este nul, atunci numaratorul respectiv este nul. Ecuatiile (S4) se numesc ecuatiile canonice ale dreptei d.
Definitia
S1 Coordonatele
( l,m,n ) ale unui vector director ![]() al dreptei d se numesc
parametrii directori ai dreptei d.
al dreptei d se numesc
parametrii directori ai dreptei d.
Din conditia ![]() rezulta ca pot fi nule
cel mult doua din cele trei numere l,m,n.
rezulta ca pot fi nule
cel mult doua din cele trei numere l,m,n.
Daca n=0 si l, m 0 atunci ecuatiile carteziene (S4) sunt echivalente cu:
![]()
si reprezinta o dreapta paralela cu planul xOy.
Daca m=n=0 si l atunci ecuatiile carteziene (S4) devin:
d: y=y0, z=z0
si reprezinta o dreapta paralela cu axa Ox.
Consideram o dreapta d de vector
director ![]() (l,m,n). Fie
(l,m,n). Fie ![]() versorul lui
versorul lui ![]() si a b g unghiurile pe care le face cu
dreapta d (deci si
si a b g unghiurile pe care le face cu
dreapta d (deci si ![]() ) cu axele de coordonate Ox,Oy,Oz respectiv (fig. S2).
) cu axele de coordonate Ox,Oy,Oz respectiv (fig. S2).
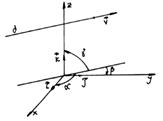
Fig. S2
Evident avem relatiile:
 (S5)
(S5)
intrucat
![]()
unde ![]()
Definitia S2 Coordonatele cosa cosb cosg ale versorului director al dreptei d se numesc cosinusurile directoare ale dreptei d.
Evident, intre cosinusurile directoare si parametrii directori l,m,n ai dreptei d avem relatiile:
![]() (S6)
(S6)
intrucat
![]() intre cosinusurile
directoare avem relatia:
intre cosinusurile
directoare avem relatia:
cos2a + cos2b + cos2g (S7)
S1.2 Dreapta determinata de doua puncte
Fie o dreapta d determinata de doua
puncte M1(x1,y1,z1) si M2(x2,y2,z2)
de vectorii de pozitie: ![]() s=1,2. Reducem acest
caz la cazul precedent considerand ca dreapta trece prin M1(x1,y1,z1)
si are vectorul director
s=1,2. Reducem acest
caz la cazul precedent considerand ca dreapta trece prin M1(x1,y1,z1)
si are vectorul director ![]() , ori in acest caz d are ecuatia vectoriala:
, ori in acest caz d are ecuatia vectoriala:
![]() (S8)
(S8)
![]() (S9)
(S9)
Trecand la coordonate in (S9) si eliminand parametrul t obtinem ecuatiile:
![]() (S10)
(S10)
S2 Planul in spatiu
S2.1 Planul determinat de un punct si un vector normal nenul
Consideram o dreapta d care trece
printr-un punct M0 si are vectorul director ![]() . Exista un singur plan P perpendicular pe d si care trece
prin M0 (fig.S3). Punctul
. Exista un singur plan P perpendicular pe d si care trece
prin M0 (fig.S3). Punctul ![]() daca si numai daca
daca si numai daca ![]() deci planul P este multimea:
deci planul P este multimea:
![]() (S11)
(S11)
Dreapta d se numeste normala la plan
iar vectorul nenul ![]() se numeste vector
normal la plan. Punctul M care genereaza planul se numeste punct curent.Vom
nota
se numeste vector
normal la plan. Punctul M care genereaza planul se numeste punct curent.Vom
nota ![]() in loc de M(x,y,z) cu
in loc de M(x,y,z) cu
![]()
Daca ![]() conditia de
ortogonalitate din (S11) devine:
conditia de
ortogonalitate din (S11) devine:
![]() (S12)
(S12)
si
trecand la coordonatele carteziene ale vectorilor obtinem ecuatia carteziana a
planului ce trece prin M0 si este perpendiculara pe ![]() :
:
P : a(x-x0)+b(y-y0)+c(z-z0)=0 (S13)
Ecuatia devine echivalenta cu:
P : ax+by+cz+d=0 (S14)
unde:
d = - (ax0+by0+cz0) (S15)
Ecuatia(S14) pentru care a2+b2+c2 0, se numeste ecuatia generala planului.
S2.2 Plane particulare
Planul care trece prin origine are ecuatia: ax+by+cz=0.
Planul care trece
prin Ox are ![]() (a,b,c)
(a,b,c)![]() si contine originea O, deci a=0 in (S14). Ecuatia lui este
deci by+cz=0 iar un plan paralel cu Ox are ecuatia by+cz+d=0.
si contine originea O, deci a=0 in (S14). Ecuatia lui este
deci by+cz=0 iar un plan paralel cu Ox are ecuatia by+cz+d=0.
Planul
perpendicular pe xOy are vectorul normal perpendicular pe ![]() deci
deci ![]() (a,b,0) si ecuatia lui
este: ax+by+d=0
(a,b,0) si ecuatia lui
este: ax+by+d=0
Un plan paralel cu
xOy are ca vector normal pe ![]() (0,0,1) deci ecuatia devine z=z0, in particular
xOy are ecuatia z=0.
(0,0,1) deci ecuatia devine z=z0, in particular
xOy are ecuatia z=0.
S2.3 Planul determinat de trei puncte necoliniare
Fie ![]() . Exista cel putin trei moduri de a obtine ecuatia unui plan
determinat de trei puncte. Aici vom folosi conditia de coplanaritatea trei
vectori.
. Exista cel putin trei moduri de a obtine ecuatia unui plan
determinat de trei puncte. Aici vom folosi conditia de coplanaritatea trei
vectori.
Fie ![]() punctul curent al
planului P. Vectorii
punctul curent al
planului P. Vectorii ![]() fiind coplanari (fig.S4)produsul
lor mixt este nul:
fiind coplanari (fig.S4)produsul
lor mixt este nul:
![]() (S16)
(S16)
Trecand la vectorii de pozitie ![]() si
si ![]() ai punctelor M si MS,
S=1,2,3 din (S16) obtinem ecuatia vectoriala a planului P:
ai punctelor M si MS,
S=1,2,3 din (S16) obtinem ecuatia vectoriala a planului P:
P : ![]() (S17)
(S17)
Trecand apoi la coordonatele vectorilor din (S17) obtinem ecuatia carteziana a planului determinat de trei puncte necoliniare:
 (S18)
(S18)
ecuatie echivalenta cu ecuatia:
 (S19)
(S19)
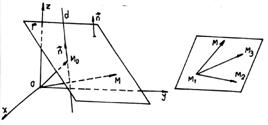
Fig. S3 Fig. S4
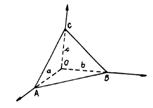
Fig.S5
Ca un caz particular obtinem ecuatia planului prin taieturi (S20) (fig. S5). inlocuind coordonatele punctelor A(a,0,0), B(0,b,0), C(0,0,c) in ecuatia (S19), dezvoltand determinantul dupa prima linie si impartind prin produsul nenul abc gasim:
P : ![]() (S20)
(S20)
S2.4 Planul determinat de un punct si doi vectori necoliniari
Fie doi vectori ![]() =(l1,m1,n1) si
=(l1,m1,n1) si ![]() =(l2,m2,n2) necoliniari
=(l2,m2,n2) necoliniari ![]() si un punct M0(x0,y0,z0).
Aceste trei elemente determina un plan unic P (fig.S6). Fie M(x,y,z) punctul
curent din planul P si
si un punct M0(x0,y0,z0).
Aceste trei elemente determina un plan unic P (fig.S6). Fie M(x,y,z) punctul
curent din planul P si ![]() ,
, ![]() . Vectorii
. Vectorii ![]() sunt coplanari deci
produsul lor mixt este nul:
sunt coplanari deci
produsul lor mixt este nul:
![]() (S21)
(S21)
Trecand la coordonate in (S21) obtinem:
 (S22)
(S22)
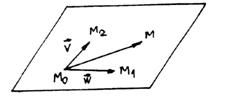
Fig. S6
Precizam ca toate ecuatiile carteziene
obtinute pentru un plan sunt echivalente cu ecuatia generala a planului
ax+by+cz+d=0 unde ![]() (a,b,c) este vector nenul normal la plan. Cum
(a,b,c) este vector nenul normal la plan. Cum ![]() ,a2+b2+c2 0. Daca, de exemplu, a 0 atunci se observa ca in ecuatia
planului sunt doar trei parametri esentiali
,a2+b2+c2 0. Daca, de exemplu, a 0 atunci se observa ca in ecuatia
planului sunt doar trei parametri esentiali ![]() . Daca se imparte cu
. Daca se imparte cu ![]() in ecuatia generala a
planului se obtine ecuatia:
in ecuatia generala a
planului se obtine ecuatia:
![]() (S23)
(S23)
numita
ecuatia normala a planului. In
aceasta ecuatie coeficientii lui x,y,z sunt coordonatele versorului director ![]() al normalei la plan
indreptate de la origine la plan,
al normalei la plan
indreptate de la origine la plan, ![]() , iar p reprezinta distanta de la origine la plan.
, iar p reprezinta distanta de la origine la plan.
In fata lui ![]() se ia semnul contrar
lui d intrucat
se ia semnul contrar
lui d intrucat ![]()
S2.5 Plan orientat
Elementul de baza in studiul planului
este normala la plan. Fie un vector director al normalei la plan. Evident
vectorul ![]() , este de asemenea un vector normal la plan; in particular,
, este de asemenea un vector normal la plan; in particular, ![]() este normal la plan.
este normal la plan.
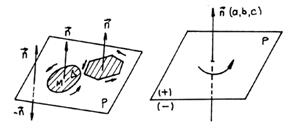
Fig. S7 Fig. S8
Definitia
S3 Perechea ![]() formata cu un plan P si
un vector normal
formata cu un plan P si
un vector normal ![]() se numeste plan orientat.
se numeste plan orientat.
Evident, un plan P are doua fete. Fata inspre care este orientata normala
(prin
vectorul sau director ![]() ) se numeste fata pozitiva (+) a planului iar fata dinspre care este orientata normala se numeste
fata negativa (-) a planului P (fig. S8). Evident, daca
schimbam orientarea pe normala fata (+) devine (-) si
invers.
) se numeste fata pozitiva (+) a planului iar fata dinspre care este orientata normala se numeste
fata negativa (-) a planului P (fig. S8). Evident, daca
schimbam orientarea pe normala fata (+) devine (-) si
invers.
Intr-un plan orientat (P,
![]() ) se poate defini un sens pozitiv de propagare a unui poligon
convex C (sau a unei alte curbe inchise: cerc, elipsa) (fig.S7). Alegerea unui
sens pozitiv pe C este echivalenta cu alegerea unui sens de rotatie in plan
(fig.S8) si totodata este echivalenta cu alegerea unui sens pe normala (fig.S9).
Este firesc sa alegem acel sens pe normala care determina o orientare a
planului coerenta cu orientarea spatiului. Evident planele de coordonate xOy,
yOz, zOx sunt orientate.
) se poate defini un sens pozitiv de propagare a unui poligon
convex C (sau a unei alte curbe inchise: cerc, elipsa) (fig.S7). Alegerea unui
sens pozitiv pe C este echivalenta cu alegerea unui sens de rotatie in plan
(fig.S8) si totodata este echivalenta cu alegerea unui sens pe normala (fig.S9).
Este firesc sa alegem acel sens pe normala care determina o orientare a
planului coerenta cu orientarea spatiului. Evident planele de coordonate xOy,
yOz, zOx sunt orientate.
Fig.S9
S2.6 Semispatii
Definitia
S4 O multime de puncte M din spatiul geometric E3 (in particular
dintr-un plan) se numeste multime convexa
daca ![]() atunci segmentul
neorientat [AB] M
(fig. S10).
atunci segmentul
neorientat [AB] M
(fig. S10).
Multimea vida si multimea formata dintr-un singur punct se considera multimi convexe. O dreapta, o semidreapta, un segment, un plan, un semiplan,
spatiul E3, etc. sunt multimi convexe.
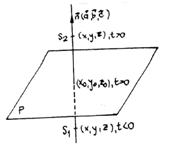
Fie in spatiul E3 planul de ecuatie:
P : ![]()
Planul P imparte spatiul in doua submultimi convexe (fig. S10), S1 si S2.
![]()
Consideram un punct (x0,y0,z0)IP si normala la planul P in acest punct:
D :x=x0 +at, y=y0+bt, z=z0+ct
cu scopul de a demonstra afirmatia facuta referitor la impartirea spatiului.
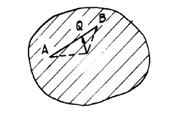
Fig.S10
Pentru un punct al dreptei, f(x,y,z) devine:
f(x,y,z)=a(x0+at)+b(y0+bt)+c(z0+ct)+d=ax0+by0+cz0+d+(a2+b2+c2)t=(a2+b2+c2)t, adica:
f(x,y,z)=(a2+b2+c2)t,
![]() (x,y,z)ID
(x,y,z)ID
Punctele
lui D pot fi impartite in trei submultimi caracterizate respectiv prin t<0, t=0 si t>0. Cand (x0,y0,z0) descrie planul P, regiunea
din spatiu maturata de semidreapta ![]() este caracterizata
prin f(x,y,z)=(a2+b2+c2)2t 0 si o notam cu S1 iar cu S2 notam regiunea din spatiu
descrisa de semidreapta t 0. Regiunea S2 este
caracterizata astfel prin f(x,y,z)=(a2+b2+c2)t
este caracterizata
prin f(x,y,z)=(a2+b2+c2)2t 0 si o notam cu S1 iar cu S2 notam regiunea din spatiu
descrisa de semidreapta t 0. Regiunea S2 este
caracterizata astfel prin f(x,y,z)=(a2+b2+c2)t
Submultimile S1 si S2 se numesc semispatii inchise.
Pentru aflarea semnului constant al unui semispatiu este suficient sa alegem un punct particular (x1,y1,z1) al semispatiului. Semnul lui f(x1,y1,z1) este si semnul semispatiului.
S2.7 Reuniunea si intersectia a doua plane
Consideram doua plane:
P1 : a1x+b1y+c1z+d1=0, P2 : a2x+b2y+c2z+d2=0
a) Reuniunea.
Notam cu P multimea:
P=
Pe
baza definitiei egalitatii de multimi aratam ca P=P1![]() P2.
P2.
Pentru orice punct (x0,y0,z0) IP avem:
(a1x0+b1y0+c1z0+d1)(a2x0+b2y0+c2z0+d2)=0
si deci cel putin un factor este zero intrucat R, fiind corp, nu are divizori ai lui zero.
Fie,
de exemplu, a1x0+b1yo+c1z0+d1=0;
rezulta ca (x0,y0,z0)![]() , deci
, deci ![]() .
.
Reciproc, din (x0,y0,z0)
I ![]() rezulta (x0,y0,z0) IP1 sau (x0,y0,z0)
IP2 ceea ce este
echivalent cu a1x0+b1y0+c1z0+d1=0
sau a2x0+b2y0+c2z0+d2=0.
In ambele cazuri:
rezulta (x0,y0,z0) IP1 sau (x0,y0,z0)
IP2 ceea ce este
echivalent cu a1x0+b1y0+c1z0+d1=0
sau a2x0+b2y0+c2z0+d2=0.
In ambele cazuri:
(a1x0+b1y0+c1z0+d1)(a2x0+b2y0+c2z0+d2)=0,
deci ![]() .
.
Din
cele doua incluziuni rezulta P=![]()
b) Intersectia. Presupunem ca planele P1
si P2 nu sunt paralele sau confundate. Intersectia![]() =D este o dreapta (fig.S11) ale carei ecuatii sunt:
=D este o dreapta (fig.S11) ale carei ecuatii sunt:
![]() (S24)
(S24)
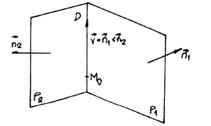
Fig. S11
Cu conditia impusa planelor P1
si P2, sistemul de ecuatii liniare prin care este reprezentata
dreapta D este simplu nedeterminat. Infinitatea simpla de solutii ale
sistemului (S24) constituie tocmai punctele dreptei D. Directia dreptei D este
data de vectorul ![]() si
si ![]() .Avem deci
.Avem deci
![]()
unde parametri directori l, m, n ai dreptei D sunt:
![]() (S25)
(S25)
Daca presupunem ca
![]()
atunci, in sistemul (S24), z este necunoscuta libera si, rezolvandu-l, obtinem:
D :
![]() (S26)
(S26)
Un punct al dreptei D data de intersectia a doua plane, se obtine intersectand planele P1 si P2 cu unul din planele de coordonate sau cu planele paralele cu acestea.
Pozitiile relative ale dreptelor sau planelor se determina astfel: se scrie sistemul format de ecuatiile acestora,se rezolva algebric acest sistem si se interpreteaza geometric rezultatul . Din punct de vedere topologic dreptele si planele sunt submultimi inchise in spatiu.
S2.8 Unghiul dintre doua plane orientate
Definitia
S5 Unghiul diedru dintre doua plane orientate P1 si P2 este
unghiul dintre doi vectori normali la cele doua plane, ![]() si
si ![]() respectiv. Fie planele
P1 si P2 date prin ecuatiile generale:
respectiv. Fie planele
P1 si P2 date prin ecuatiile generale:
Pi : aix+biy+ciz+di=0, i=1,2 (S27)
Doi vectori normali la planele P1
si P2 sunt ![]() (a1,b1,c1)
respectiv
(a1,b1,c1)
respectiv ![]() (a2,b2,c2).
Unghiul f dintre
cele doua plane este determinat prin
relatia:
(a2,b2,c2).
Unghiul f dintre
cele doua plane este determinat prin
relatia:
![]()
Pozitiile particulare ale doua plane sunt:
a) perpendiculare,
daca si numai daca (![]() ,
,![]() )=0 sau, echivalent,
)=0 sau, echivalent,
a1a2+b1b2+c1c2=0; (S28)
b) paralele, daca ![]() ||
||![]() sau, echivalent,
sau, echivalent,
![]() (S29)
(S29)
daca ![]() planele sunt paralele
dinstincte;
planele sunt paralele
dinstincte;
daca ![]() , planele sunt confundate.
, planele sunt confundate.
S2.9 Fascicolul de plane. Stea de plane
Definitia S6 Fiind data o dreapta D se numeste fascicol de plane multimea tuturor planelor din E3 care trec prin dreapta D.
Fie planele P1 si P2 de
ecuatii (S17). Presupunand ![]() fie dreapta lor de
intersectie: D=
fie dreapta lor de
intersectie: D=![]() iar P3 : ax+by+cz+d=0 un plan arbitrar din
fascicolul determinat de dreapta D.
iar P3 : ax+by+cz+d=0 un plan arbitrar din
fascicolul determinat de dreapta D.
Avem deci ![]() (a,b,c) D sau, echivalent
(a,b,c) D sau, echivalent ![]() este coplanar cu
este coplanar cu ![]() si
si ![]() , ceea ce se scrie:
, ceea ce se scrie:
![]() (S30)
(S30)
Trecand la coordonatele vectorilor![]() ,
,![]() si
si ![]() , din (S30) obtinem
, din (S30) obtinem
![]() (S31)
(S31)
inlocuind pe a,b,c din (S31) in ecuatia planului P3 obtinem:
![]() (S32)
(S32)
Punand conditia ca orice punct M0(x0,y0,z0) de pe D se afla si in planul arbitrar din fascicol (M0IP) gasim:
![]() (S33)
(S33)
ceea ce conduce la relatia:
![]() adica
adica ![]()
tinand seama de (S33) si (S30) ecuatia unui plan oarecare P3 din fascicolul determinat de dreapta D devine:
![]() (S34)
(S34)
Planul P3 fiind arbitrar din fascicolul determinat de dreapta D rezulta ca
ecuatia (S34) reprezinta ecuatia fascicolului de plane determinat de dreapta:
D : ![]() (S35)
(S35)
Fie acum trei plane:
Pi : aix+biy+ciz+di = 0, i=1,2,3 (S36)
care
se intersecteaza intr-un singur punct M0(x0,y0,z0)
adica ![]() sau, echivalent:
sau, echivalent:

Definitia S7 Se numeste stea de plane determinata de punctul M0 multimea tuturor planelor din E3 care trec prin punctul M0.
Fie P: ax+by+cz+d=0 un plan arbitrar
din steaua de plane determinata de punctul M0. Cum vectorii ![]() sunt necoplanari,
avem:
sunt necoplanari,
avem:
![]() (S37)
(S37)
unde ![]() (a,b,c) P. Trecand la coordonate in (S37),
inlocuind apoi expresiile gasite pentru a,b,c in ecuatia lui P si tinand seama
ca M=0IP se
obtine ecuatia lui P:
(a,b,c) P. Trecand la coordonate in (S37),
inlocuind apoi expresiile gasite pentru a,b,c in ecuatia lui P si tinand seama
ca M=0IP se
obtine ecuatia lui P:
![]() (S38)
(S38)
unde
![]()
Cum P este un plan oarecare ce trece prin M0 rezulta ca (S38) este ecuatia stelei de plane determinata de M0.
S3. PROBLEME ASUPRA DREPTEI SI PLANULUI
S3.1 Unghiul dintre o dreapta orientata si un plan orientat
Fie o dreapta D de vector director ![]() (l,m,n) si un plan P: ax+by+cz+d=0. Presupunem ca D
intersecteaza planul si fie D proiectia ortogonala a lui D pe planul P. Unghiul
dintre dreapta orientata D si planul orientat P este unghiul f dintre dreapta D si proiectia D`
pe planul P (fig.S12).
(l,m,n) si un plan P: ax+by+cz+d=0. Presupunem ca D
intersecteaza planul si fie D proiectia ortogonala a lui D pe planul P. Unghiul
dintre dreapta orientata D si planul orientat P este unghiul f dintre dreapta D si proiectia D`
pe planul P (fig.S12).
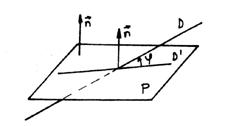
Fig. S12
Acest unghi fiind complementarul
unghiului dintre ![]() si
si ![]() il putem determina cu formula:
il putem determina cu formula:
![]() (S39)
(S39)
sau
![]() (S40)
(S40)
Pozitii particulare :
a)
dreapta D este paralela cu planul P daca si numai daca ![]() ; in particular D P daca si numai daca
; in particular D P daca si numai daca ![]() si un punct M0(x0,y0,z0)
al dreptei D apartine planului P.
si un punct M0(x0,y0,z0)
al dreptei D apartine planului P.
b)
dreapta D este perpendiulara pe planul P daca si numai daca ![]() sau echivalent
sau echivalent
(a,b,c)=l (l,m,n), ![]() . (S41)
. (S41)
S3.2 Distantele de la un punct la o dreapta si la un plan
a) Fie o dreapta D : ![]() ; M0(x0,y0,z0)ID si
; M0(x0,y0,z0)ID si ![]() (l,m,n)|| D. Fie M un punct din E3. Distanta d(M,
D) este inaltimea paralelogramului construit pe reprezentantii cu originea
comuna M0 ai vectorilor
(l,m,n)|| D. Fie M un punct din E3. Distanta d(M,
D) este inaltimea paralelogramului construit pe reprezentantii cu originea
comuna M0 ai vectorilor ![]() si
si ![]() (fig S13) deci:
(fig S13) deci:
d(M ; D)
=  (S42)
(S42)
b)
Fie un plan P : ax+by+cz+d=0 si un punct A0(x0,y0,z0)IP iar A1 (x1,y1,z1)
proiectia lui A0 pe planul P (fig S14). Distanta de la A0
la planul P, notata cu d(A0, P) este lungimea ![]()
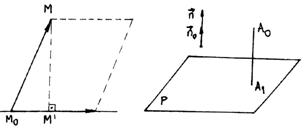
Fig. S13 Fig. S14
Fie ![]() versorul lui
versorul lui ![]() si
si ![]() cosinusurile
directoare ale normei la planul P. Cum
cosinusurile
directoare ale normei la planul P. Cum ![]() (a,b,c), avem:
(a,b,c), avem:
![]()
Produsul scalar ![]() sau
sau
echivalent:
![]() (S43)
(S43)
intrucat M1(x1,y1,z=1)IP avem ax1+by1+cz1+d=0 . Cu aceasta relatia (S50) devine:
![]() (S44)
(S44)
S3.3 Perpendiculara comuna a doua drepte din spatiu
Fie dreptele
Di : ![]() . (S45)
. (S45)
Dreapta Di (i=1,2) trece
prin Mi(xi,yi,zi) si are vectorul
director ![]() (li,mi,ni) .
(li,mi,ni) .
Dreptele Di si D2 sunt in acelasi
plan sau sunt oarecare in spatiu dupa cum produsul mixt ![]() este nul respectiv
nenul. Cand sunt coplanare D1 si D2 pot avea urmatoarele
pozitii:
este nul respectiv
nenul. Cand sunt coplanare D1 si D2 pot avea urmatoarele
pozitii:
concurente (daca ![]()
paralele distincte
(daca ![]() dar
dar ![]()
confundate
(daca ![]() si
si ![]()
Pentru doua drepte D1 si D2
oarecare in spatiu sau concurente exista o directie
normala comuna unica. Fie ![]() si
si ![]() vectori directori ai
dreptelor D1 si D2 respectiv. In acest caz exista o dreapta si numai una care se sprijina
pe cele doua drepte avand directia data de
vectori directori ai
dreptelor D1 si D2 respectiv. In acest caz exista o dreapta si numai una care se sprijina
pe cele doua drepte avand directia data de ![]() numita perpendiculara comuna a dreptelor D1 si D2.
numita perpendiculara comuna a dreptelor D1 si D2.
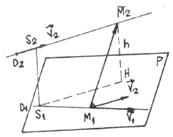
Fig. S17
Ecuatiile perpendicularei comune D se
deduc pornind de la observatia ca D se afla la intersectia a doua plane: planul
P1 care contine pe ![]() si D1 si
planul P2 care contine pe
si D1 si
planul P2 care contine pe ![]() si D2;
planul P1 este determinat deci de M1,
si D2;
planul P1 este determinat deci de M1, ![]() si
si ![]() iar P2 este determinat de M2 ,
iar P2 este determinat de M2 , ![]() si
si ![]() . Notand cu M si Q punctul curent din P1 respectiv
P2, ecuatiile perpendicularei comune sunt:
. Notand cu M si Q punctul curent din P1 respectiv
P2, ecuatiile perpendicularei comune sunt:
 (S46)
(S46)
unde
![]() si
si ![]() , (s=1,2) .(S47)
, (s=1,2) .(S47)
S3.4 Distanta dintre doua drepte
Fie D1 si D2 doua drepte descrise de punctele M si Q, respectiv. Distanta dintre dreptele D1 si D2 este prin definitie numarul inf d(M,Q) si se noteaza cu d(D1 ; D2). Distanta dintre doua drepte se gaseste astfel:
a) daca D1 si D2 sunt concurente atunci d(D1;D2)=0 ;
b) daca D1||D2 atunci se duce un plan perpendicular pe D1 in A0ID1 care taie pe D2 in B0 si d(D1;D2)=d(A0;B0) ;
c) daca D1 si D2 sunt oarecare in spatiu, d(D1;D2)=![]() unde S1 si S2 sunt punctele de sprijin
ale perpendicularei comune pe dreptele D1 si D2 (fig. S17).
unde S1 si S2 sunt punctele de sprijin
ale perpendicularei comune pe dreptele D1 si D2 (fig. S17).
In acest caz pentru aflarea distantei
prin D1 ducem un plan P paralel cu D2 si d(D1;D2)= d(M2;P)=h unde h este inaltimea paralelipipedului
construit pe ![]() si
si ![]() . Cum volumul acestuia este egal cu
. Cum volumul acestuia este egal cu ![]() si totodata cu
si totodata cu ![]() rezulta:
rezulta:
 (S48)
(S48)
Aplicatii rezolvate
Aplicatia 1
Fie dreptele
Sa se afle :
a) unghiul dintre cele doua drepte ;
b) ecuatia
planului ![]() care include dreapta
care include dreapta ![]() si este paralela cu
si este paralela cu ![]() ;
;
c) Distanta
de la ![]() la planul
la planul ![]() ;
;
d) Ecuatia perpendicularei comune celor doua drepte .
a) Din ecuatia dreptelor rezulta
![]() si
si ![]()
Unghiul
celor doua drepte este dat de unghiul vectorilor ![]() si
si ![]() :
:
![]()
b)
Notam ![]() - normala la planul
- normala la planul ![]() cautat .
cautat .
Avem
c)
![]()
d) Perpendiculara comuna este intersectia planelor :
unde M este un punct oarecare al perpendicularei comune .
Pentru intersectie si respectiv pentru ecuatia perpendicularei comuna ne trebuie un punct al celor doua plane .
![]()
Fie
![]()
Aplicatia 2
Sa se determine un plan care trece prin intersectia planelor :
![]()
si care formeaza cu planul :
![]()
un
unghi ![]() .
.
Rezolvare :
Consider fasciculul de plane ce trece prin dreapta de intersectie :
![]()
si
caut acel plan (adica ![]() ?) pentru care
?) pentru care ![]() .
.
Avem
![]()
vectorul normal la plan este :
![]()
Unghiul
cautat de ![]() este unghiul dintre
este unghiul dintre ![]() ( normala la planul P ). Avem
( normala la planul P ). Avem ![]()
Dar
: 
![]() planul cautat este :
planul cautat este : ![]()
Aplicatia 3
Sa se afle ecuatia unui plan P care :
a)
trece prin punctele ![]() si este perpendiculara
pe planul :
si este perpendiculara
pe planul :
![]()
b)
Trece prin punctul ![]() si este perpendicular
pe dreapta :
si este perpendicular
pe dreapta :
![]()
c)
Trece prin punctul ![]() stiind ca B este piciorul perpendicularei din origine pe
acest plan.
stiind ca B este piciorul perpendicularei din origine pe
acest plan.
Rezolvare :
a)
![]()

Am notat cu M un punct oarecare al planului P.
b)
Notam ![]() - vectorul normal la planul cautat P.
- vectorul normal la planul cautat P.
Avem
Dar
![]()
c) Daca ![]() este proiectia lui
este proiectia lui ![]() pe planul cautat
pe planul cautat
![]() (unde
(unde ![]() este vectorul normal
la planul P) .
este vectorul normal
la planul P) .
Ecuatia normala a planului este :
![]()
unde ![]() sunt unghiurile formate
de
sunt unghiurile formate
de ![]() cu axele Ox, Oy si
respectiv Oz, iar d= distanta de la O la plan.
cu axele Ox, Oy si
respectiv Oz, iar d= distanta de la O la plan.
Avem
![]() ecuatia planului
cautat este :
ecuatia planului
cautat este :
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 6186
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved