| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
UNIVERSITATEA POLITEHNICA DIN BUCURESTI
FACULTATEA DE INGINERIE AEROSPATIALA
Clasificarea aeronavelor
Clasificarea aeronavelor
O aeronava este orice echipament capabil sa se deplaseze prin aer pentru a efectua un transport util, iar mentinerea in atmosfera se efectueaza cu ajutorul altor reactii ale aerului decat cele asupra suprafetei pamantului.
Clasificare
Se pot distinge doua categorii de aeronave
aerostate
aeronave mai usoare decat aerul avand masa mai mica decat masa volumului de aer dizlocuit. Sustinerea lor in atmosfera terestra (sustentatia) este asigurata de forta arhimedica.
aerodine
aeronave mai grele decat aerul. Sustentatia lor este asigurata de forta portanta, de natura aerodinamica. Forta portanta este dezvoltata, in principal, pe o velatura (pe aripi) si implica existenta miscarii aerodinei in masa de aer
Aerostatul este o aeronava construita pe principiul plutirii corpurilor (spre deosebire de masinile aeriene).
Aerostatele pot fi de mai multe tipuri:
baloane
o cu aer cald
o cu gaz mai usor decat aerul
dirijabile
Balonul este un aerostat 1] format dintr-o invelitoare de forma sferica, impermeabila, cu interiorul umplut cu aer cald sau gaze mai usoare decat aerul (de exemplu cu heliu sau hidrogen). Invelitorii balonului de obicei i se atasaza o nacela.[2]
Invelitoarea balonului poate fi inchisa ermetic, cazul baloanelor sub presiune, sau poate fi prevazuta la partea inferioara cu o deschidere (prin care gazul nu poate iesi, gazul fiind mai usor decat aerul).
Baloanele se mai numeau aerostate, astazi ele sunt considerate o categorie din grupa mare a aerostatelor, pe langa grupa dirijabilelor.
Aerodina este un vehicul aerian construit pe principiul zborului mecanic. Aerodinele desemneaza toate masinile aeriene capabile de zbor, dar care nu sunt aerostate (care nu se bazeaza pe principiul plutirii corpurilor).
Aerodinele se impart in trei categorii:
ornitoptere (au aripi batante)
elicoptere (au aripa rotativa)
aeroplane (au aripa fixa), categorie subimpartita in:
o avioane (au aripa fixa si motor)
o planoare (au aripa fixa, dar nu au motor)
Ornitopterele si entomopterele reprezinta minivehiculele si microvehiculele pentru zbor (aerodine) cu aripi batante, care imita zborul pasarilor, respectiv al insectelor.
Aparitia muschiului chimic, care transforma energia chimica in energia mecanica a unor piese aflate in miscare oscilatorie, face posibila propulsia cu aripi batante.
Elicopterul este un vehicul aerian motorizat, din categoria Aeronave cu aripa rotativa, care poate decola si ateriza pe verticala si a carui sustinere si miscare sunt asigurate de una sau mai multe elice care se rotesc in jurul unor axe verticale. Calitatea sa este ca poate ateriza pe un spatiu extrem de redus ori se poate mentine in aer intr-un punct fix.
Aeroplanul este o clasa de aerodine cu o suprafata portanta fixa. Suprafata portanta asigura sustentatia aeroplanului fie prin actiunea unui grup motopropulsor, fie prin actiunea unei componente a greutatii (la zborul in coborare sau la zborul fara motor).
CLASIFICAREA AVIOANELOR
Exista multe criterii de clasificare a
aeronavelor (unele insa destul de subiective). Urmeaza
cateva dintre ele, exemplificand, fara a lua in consideratie
elicopterele, dirijabilele, avioanele ultrausoare sau cele fara
structura de rezistenta.
Un prim criteriu este dupa destinatia lor:
|
Airbus A318:scurt-curier |
Airbus A300: mediu-curier |
Airbus A340-600: lung-curier |
Aeronavele cu destinatie civila sunt folosite pentru transportul pasagerilor, al marfurilor sau aeronavele utilitare. Din punct de vedere al distantei de zbor, ele se clasifica in aeronave pentru:
Multe linii aeriene impart avioanele cu destinatie civila in alte doua categorii din punct de vedere operational:
Aeronavele cu destinatie militara se subclasifica din punctul de vedere al misiunii specifice:
|
B1-B: bombardament |
E-3 Sentry AWACS: cercetare si supraveghere aeriana |
Alpha Jet: antrenament/scoala |
C-5 Galaxy: transport strategic greu |
|
F-18E Super Hornet: multirol |
Panavia Tornado: multirol |
In general insa, avioanele militare au misiuni multirol, de exemplu: vanatoare-interceptie-strategie-bombardament (F-16, F/A-18, MIG-29, Tornado, Saab-39 Gripen, Rafale).
Aeronavele cu destinatie speciala sunt utilizate pentru cercetare sau experimentare. Tot in aceasta categorie se incadreaza aeronavele experimentale ale caror solutii constructive de natura aerodinamica sau tehnologica urmeaza a fi implementate la viitoarele aeronave de serie.
Dupa sistemul de propulsie, aeronavele se clasifica in:
Din prima categorie fac parte aeronavele echipate cu motoare clasice cu piston si elice, din cea de-a doua categorie aeronavele cu motoare turboreactoare, iar din ultima, cele echipate motoare turbopropulsoare.
Dupa numarul de motoare, aeronavele se clasifica in:
Avioanele de pasageri au, in general, intre doua si patru motoare.
CLASIFICAREA VEHICULELOR AERIENE MODERNE
FARA PILOT UMAN LA BORD
UAV-urile sunt impartite pe diverse clase si categorii in functie de scopul pentru care au fost create. Astfel de categorii sunt:
TUAV (Tactical UAV) - sunt aparate de zbor concepute sa asigure sprijinul tactic in operatiuni militare pe raze scurte de actiune (200 km) si la joasa altitudine, capabile sa furnizeze informatii in timp real, cum ar fi imagini pe timp de zi sau noapte, recunoastere si gasirea tintelor. Este folosit in special de diviziile de infanterie mecanizate. Un astfel de aparat este RQ-6 Outrider :

MAE UAV (Medium Altitude Endurance UAV) - aceste aparate sunt capabile sa patrunda in adancimea teritoriului monitorizat, avand raze de actiune de peste 1000 de km, la o altitudine medie si o anduranta de zbor de peste 24 de ore. Sunt echipate cu senzori electro-optici, infrarosu, radar mobil si alte aparate electronice. Un asemenea avion este RQ-1 Predator :

HAE UAV (High Altitude Endurance UAV) - aceasta clasa de aparate este destinata misiunilor care necesita o raza lunga de actiune (peste 5000 km) la altitudine mare (aproximativ 20000 m) si o anduranta de 36-42 de ore. Aceste avioane sunt folosite pentru supravegherea si spionarea teritoriului. Ele transmit informatiile obtinute prin satelit catre centrului de comanda. Se pot folosi si ca radar avansat. In aceasta categorie se incadreaza avionul RQ-4 Global Hawk :

UCAV (Unmanned Combat Aerial Vehicle) - este o noua clasa de UAV-uri echipata cu armament pentru a participa direct in lupta aeriana sau de bombardament. UCAV-ul foloseste sisteme proprii de comanda si control, putandu-si efectua misiunile in mod autonom, fara ajutorul unui operator. Un astfel de UCAV este si Boeing X-45 care va intra in serviciul armatei americane in 2010:

MAV (Micro Air Vehicle) - este un aparat de zbor, echipat cu camera de filmat, folosit de catre un soldat in cazul luptelor urbane, pentru a vedea imagini dupa coltul unei cladiri:
rachetelor, blindajul de protectie, acrosajele si
aparatura adecvata misiunilor de lupta.
Actionarea comenzilor avionului se realizeaza prin
intermediul instalatiilor hidraulice si pneumatice.
Esentiale pentru zborul avionului sunt si instalatiile de
alimentare cu combustibil si ulei, instalatiile electrice, de
antigivraj (dezghetare), sanitara, de izolatie termica
si fonica, climatizare si comenzile agregatelor aeronavei, echipamentul
de dirijare.
Comanda sistemului de propulsie si a comenzilor
partilor sale mobile asigura manevrarea aeronavei.
Comanda tractiunii se realizeaza prin maneta de gaze care
actioneaza sistemul de propulsie. Comenzile
partilor mobile sunt asigurate prin mansa, paloniere,
flapsuri, frane, etc. De exemplu, actionarea mansei inainte
si inapoi implica bracarea profundoarelor in sus si in jos, fapt care duce la o miscare a avionului in sus sau
in jos. Miscarea mansei spre stanga sau dreapta
actioneaza eleroanele de pe aripi, ducand la o miscare de ruliu
(rotatie) in jurul axei longitudinale. Calcarea
palonierelor (pedalelor) spre stanga sau dreapta actioneaza
directia avionului in lateral. Ceea ce
trebuie retinut insa, este ca manevrarea aeronavei se face prin
actionarea combinata a diferitelor menzi. 


VTUAV
(Vertical Take-Off and Landing (VTOL) Tactical UAV) - din aceasta clasa face parte
elicopterul fara pilot RQ-8A/B Fire Scout :
HAA (High Altitude Airship) - dirijabil fara pilot de mare altitudine (19800 m):

PARTI COMPONENTE ALE AVIONULUI
Forma exterioara a avionului, dimensiunile,
motorizarea, organizarea structurala a componentelor sale ii
influenteaza direct performantele. Avionul este
un aparat complex alcatuit in mod normal din patru subsisteme:
1. structura
de rezistenta
2. sistemul de propulsie
3. echipamentele de bord si aparatele de
comanda a zborului
4. instalatiile si mecanizarea aeronavei
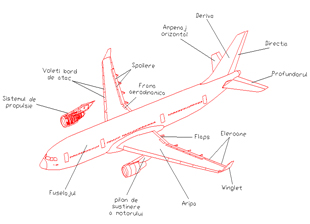
In general, un avion este alcatuit din urmatoarele parti
principale: aripa cu dispozitivele sale de sustentatie, fuzelajul,
ampenajele orizontal si vertical cu partile lor mobile, trenul
de aterizare si sistemul de propulsie. Partile mobile ale
avionului sunt: eleroanele, profundorul, directia, flapsurile,
voletii, frana aerodinamica si compensatoarele.
Aparatura de bord este alcatuita din:
sisteme pentru controlul zborului, sisteme pentru controlul
functionarii motoarelor, sisteme de navigatie aeriana,
aparatura radio/radiolocatie.
La avioanele militare se adauga armamentul de bord, instalatiile de
bombardament si dirijare a
1.6. ECHIPAMENTELE AVIOANELOR FARA PILOT
Tipurile de echipamente ale vehiculelor aeriene sunt in functie de cerintele diferitelor misiuni pe care le desfasoara. Cele mai utilizate echipamente pentru sistemele UAV sunt cele de recunoastere, culegere de informatii, supraveghere si achizitie de tinte. Echipamentele prioritare sunt cele electro-optice, infrarosu si radar. Niste parametri importanti care definesc echipamentele sunt : rezolutia, aria de cercetare, dimensiunile, costul efectiv, performantele vehiculului si cerintele tactice. Obtinerea imaginilor la statia de control de la sol (GCS) nu este suficienta. Dupa primirea datelor evaluarea informatiilor trebuie facuta la unitatile operationale in timp real.
O evaluarea va fi facuta pentru a avea o supraveghere eficienta, o capabilitate de recunoastere si un timp real de transmitere a datelor.
Sunt cereri in crestere in lumea moderna pentru a folosi sisteme UAV pentru culegere de informatii, recunoastere, supraveghere si achizitie de date.
Desi cererile pentru avioane fara pilot schimba baza misiunilor duse, asteptarile sunt similare pentru fiecare tip. Costul efectiv, fiabilitatea, utilitatea si disponibilitatea sunt niste cerinte pe care toate sistemele trebuie sa le aibe.
Toate sistemele UAV trebuie sa indeplineasca cerintele de baza. Aceste cerinte ajuta la cresterea performantelor sistemelor UAV cum ar fi : performantele vehicolului aerian, statia de control de la sol, echipamentele si conexiunea de date.
Echipamentele avioanelor fara pilot sunt echipamentele pentru care UAV-urile de baza ofera platforma si transportul. Volumul echipamentelor este in functie de marimea, greutatea si puterea avute la dispozitie pentru a putea indeplini functiile de baza cum sunt decolarea, zborul si aterizarea. Tipurile de echipamente transportate de vehicolul aerian sunt alese in functie de diferitele cerinte ale misiunii. Echipamentele de recunoastere sunt cele mai des folosite de catre sistemele UAV. Tehnologiile pentru echipament primar, pentru misiuni de recunoastere sunt electro-optice (EO), infrarosu (IR) si radar. Notiunile cheie asociate cu ele sunt: rezolutia pentru vederea la distanta si asupra unei arii destul de largi. Echipamentele trebuie sa fie mici si usoare, sa consume putina energie, astfel incat un UAV sa le poata cara pe o perioada destul de lunga pentru a satisface nevoile utilizatorului si sa fie la un pret accesibil. In colaborare cu alti senzori, cum ar fi detectorul de raza si sistemul de navigatie al UAV-ului, echipamentul poate sa determine localizarea tinte cu un grad de precizie ridicat. Pentru utilizatorii si proiectantii sistemelor UAV alegerea echipamentului optim pentru cerintele misiunii este de prima importanta. Avantajele relative ale tipurilor de senzori si potentialul lor pentru a satisface un sir de scopuri si de misiuni trebuie sa fie evaluat. Tehnologia avanseaza rapid in multe domenii de procesare a semnalelor si datelor. Potentialul unor noi solutii pentru problemele curente trebuie sa se ia in considerare. Unele misiuni cer punerea si controlul mai multor echipamente in acelasi timp. Conexiunea datelor, limitarile de interfata si controlul (GCS) indreptatesc aceasta cerinta. Oricare ar fi cerintele operationale, trebuie sa se aiba echipament modulat. Cu alte cuvinte, diferite tipuri de echipamente, cum ar fi de recunoastere , detectare de mine, meteorologie, etc., ar trebui sa fie usor conectate in avion si fara modificari. Nu este suficienta detinerea datelor evaluate in (GCS), ci trebuie distribuite unitatilor active in timp util.
Echipamente aeropurtate esentiale
Prezentam principalele categorii de echipamente utilizate pentru avioane fara pilot de generatie curenta.
Navigatie si control
- Autopilot de stabilizare: este folosit ca backup pentru faze de zbor care implica pilotare de catre operator de la sol si se activeaza la evenimente precum tranzitia de la zbor autonom (programat), sau cand operatorul pierde controlul asupra UAV (manevre gresite sau turbulenta atmosferica). Acest sistem aduce UAV intr-o atitudine prestabilita, putand fi conceput pentru 3 axe de stabilizare.
- Autopilot programabil: UAV este dotat cu acest sistem in cazul in care pilotarea de la sol nu mai este practica (fie distanta este foarte mare, fie este necesar un anumit grad de precizie a evolutiilor). De regula, este activat deasupra unei zone care se
doreste a fi monitorizata si pentru aceasta majoritatea UAV-urilor existente utilizeaza sisteme care asigura evolutii simple, majoritatea in plan orizontal.
Modalitatea de proiectare a acestor sisteme este binecunoscuta (control "in bucla inchisa"). Pentru precizie in spatiu este necesar si un sistem GPS care sa ofere feedback asupra pozitiei.
- GPS (Global Position System): la ora actuala exista sisteme GPS suficient de precise si la preturi relativ reduse. Avantajele utilizarii in sistemul UAV sunt evidente:
determinarea pozitiei in timp real, a vitezei (backup la datele de viteza de la senzorul de viteza al UAV), integrarea cu autopilotul programabil pentru evolutii precise.
Observare si monitorizare
- Camera video pentru pilotare de la sol: orientata catre partea anterioara a UAV, serveste la captarea de imagini pentru ecranul operatorului din statia de control de la sol. Ofera imaginea tipica a pilotarii "de la bord". Camera este de obicei fixa, fiind destinata numai pentru pilotare. Este o solutie deosebit de simpla si eficace, deoarece datorita costului relativ redus, poate echipa orice UAV nesofisticat, sau direct in etapele de validare a unor proiecte UAV noi.
- Camera video de monitorizare: este destinata observarii propriu-zise, avand parametrii profesionali (rezolutie, zoom) si posibilitatea operarii in spectrul vizibil si infrarosu. Este de dorit ca aceasta camera sa fie montata intr-o articulatie mobila, in modul ideal acoperand emisfera inferioara a UAV-ului (o solutie simpla este cea cu doua grade de libertate de rotatie).




- Senzori pentru parametrii zborului: senzorii obligatoriu prezenti sunt altimetrul,
vitezometrul, turometrul. Alti senzori care sunt utili sunt cei de temperatura a motorului, de deflexie a suprafetelor de comanda, precum si cei de avertizare privind functionarea echipamentelor electronice (avertizare la sursele de la bord, avertizare la limita distantei de comunicatie).
Echipamente pentru decolare-lansare si aterizare-recuperare
. Decolare-lansare
- decolare clasica, caz in care UAV este dotat cu tren de aterizare (fix sau largabil).
Dezavantajul major al solutiei il constituie necesitatea folosirii cel putin a unui teren
fara obstacole, relativ plat. Pe de alta parte, in cazul unor UAV-uri cu raza mare de
actiune, dezavantajul de mai sus nu conteaza, nemaifiind necesare investitii suplimentare pentru alte modalitati de lansare.
- decolare-lansare asistata, solutie folosita pentru operarea UAV-urilor in zone greu accesibile (civil) sau in vecinatatea zonelor de conflict (militar). S-au cristalizat doua tipuri de lansare asistata:
1. cu rampa de lansare: UAV nu mai necesita tren de aterizare, fiind accelerat peste viteza minima de sustentatie prin actionarea instalatiei de forta a rampei (motor electric sau sistem elastic);


2. cu booster: o solutie pentru asa-numitele "decolari de lungime zero".

Aterizare-recuperare
- aterizare clasica, cu tren de aterizare, de obicei pentru UAV-uri de dimensiuni mari si raze mari de actiune;
- recuperare prin parasutare, aceasta solutie fiind probabil cea mai comoda metoda pentru majoritatea UAV-urilor. Avantajele esentiale constau in eliminarea unor echipamente auxiliare de recuperare de sol si indiferenta fata de teren. Alte avantaje constau in "asocierea" unor evenimente cu folosirea parasutei (defectiuni ale unor sisteme, avarii, pierdere de semnal, etc);


- recuperare cu plasa, ca alternativa la recuperarea cu parasuta, este utilizata in cazul in care acomodarea unei parasute de recuperare impune penalitati mari proiectului UAV (cost si/sau afectarea caracteristicilor). Cu toate acestea sunt necesare alte cheltuieli legate de sistemul terestru de recuperare cu plasa (vehicul sau platforma adaptata). De asemenea, in lipsa unui sistem de navigatie sensibil, este necesara aducerea UAV-ului de catre operator de la o anumita distanta inspre sistemul de recuperare.


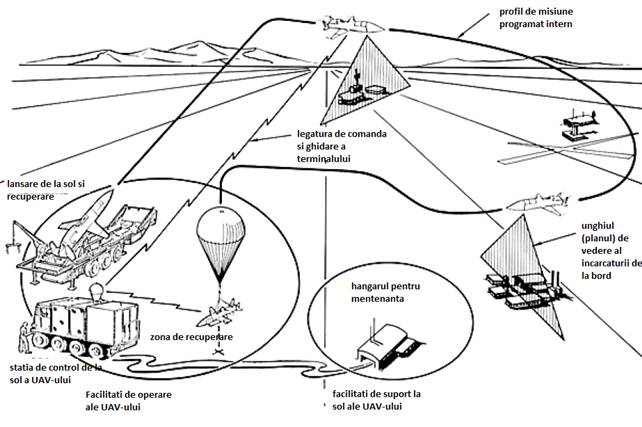
Echipamente la sol
Acest capitol descrie echipamentele de sol care asista UAV-ul atat in zbor cat si in fazele premergatoare si ulterioare zborului.
Vehicul pentru transport, asistenta tehnica
Aceasta componenta a sistemului de operare a UAV este optionala, nefiind prezenta in cazul unor avioane fara pilot de complexitate si dimensiune mare care de obicei actioneaza de pe baze permanente si care au benficiul razei mari de actiune.Vehiculul are rol de transport la lansare si configurare pentru zbor a UAV. Aceasta configurare este de tip "hard", asigurand montarea componentelor avionului si testarea lor inainte de lansare.
Vehicul de decolare-lansare
Pentru decolare, vehiculul transporta rampa de lansare (trebuie luat in considerare factorul de sarcina longitudinal in proiectarea structurii UAV).
rampa de lansare are in compunere urmatoarele elemente principale:
- sistemul de actionare propriu-zis ce consta din instalatia de forta (motor
electric, instalatia pneumatica, elemente clasice, booster) si un suport mobil
actionat de aceasta pentru deplasarea pe rampa a avionului. In cazul
accelerarii cu booster, suportul mobil poate lipsi, in functie de solutia
particulara adoptata.
- sina de deplasare sau ghidaje, avand o lungime utila pentru accelerare si o
lungime de franare a suportului mobil, ungiul de panta este cel considerat a
oferi siguranta avionului dupa parasirea rampei.
- elemente de fixare pe teren.

Statia de control de la sol/Centrul de control-programare a zborului
Statia de control de la sol (GCS - ,,Ground Control Station") este centrul operational de control al intregului sistem UAV. Ea controleaza lansarea, zborul, si recuperarea vehiculului aerian, primeste si proceseaza datele de la echipamente, controleaza operatiunile echipamentelor in timp real si ofera interfata intre UAV si mediul inconjurator.
Aceasta componenta a sistemului UAV este probabil cea mai importanta si are rolul de:
- a integra achizitia datelor in timp real (telemetrarea parametrilor esentiali de
zbor, imagini, etc.)
- a planifica si a programa in consecinta misiunea UAV (in cazul in care
avionul este dotat cu pilot programabil);
- a permite interventia asupra zborului UAV (preluarea pilotarii UAV da la
consola sau trecera la alta secventa de zbor programat).
Statia de control de la sol trebuie sa fie accesibila, modulara, flexibila, capabila sa intretina softul si sa afiseze corespunzator rezultatele, capabila sa execute operatiile in conditiile inconjuratoare specifice, usor de desfasurat si de transportat. Trebuie de asemenea sa aibe un design ergonomic al displeiului si instrumentelor de operare si control.
Personalul minim implicat este format din:
- pilotul UAV, care pentru pilotare dispune de o consola de comenzi ale
avionului si de imaginea transmisa de camera de pilotaj, peste aceasta imagine
de obicei suprapunandu-se informatiile esentiale telemetrate (viteza,
altitudine, viteza verticala, regim motor);
- observatorul zborului, care are responsabilitatea de a decide fazele misiunii,
in functie de informatiile obtinute de la UAV (in principal camera de
observare sau alti senzori).




Statie de procesare-interpretare a datelor
In cazul in care nu este posibila transmiterea datelor in timp real (in afara de
datele privind parametrii zborului si ai sistemelor de la bord, care trebuie in permanenta monitorizate, imaginile stocate la bord sau alte date inregistrate, in functie de natura lor sunt procesate de maniera specifica in aceasta componenta a sistemului de operare UAV.
Vehicul pentru aterizare-recuperare
Un vehicul poate fi destinat in mod special recuperarii daca se intentioneaza recuperarea UAV cu ajutorul unei plase de prindere. UAV este pilotat de catre zona aleasa pentru recuperare, pe traiectoria acestuia (la viteze suficient de mici) interpunandu-se o plasa de recuperare in pozitie vericala.
Sistemul care sustine plasa si asigura o amortizare a socului poate fi montat de sine statator sau plasat pe sasiul vehicului de recuperare.
Aceasta maniera de recuperare este probabil cea mai precisa dintre cele trei utilizate (aterizare clasica, recuperare cu parasuta, recuperare cu plasa), insa impune studii si cheltuieli suplimentare.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 7658
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved








