| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Cap.1
INTRODUCERE
Una din functiile indispensabila pentru conducerea eficienta a unui proces, indiferent de procedeele si mijloacele aplicate, este aceea de informare. Deciziile de conducere pot fi luate numai pe baza unor informatii cat mai corecte si mai complete asupra unor parametri semnificativi pentru caracterizarea tehnico economica a procesului. Informatiile respective, reprezentand in ultima instanta valori ale unor marimi fizice(sau ale unor indicatori calculati prin intermediul acestora),chiar si in cazul conducerii manuale se obtin ca rezultat al unor operatii de masurare.
Definitia clasica a operatiei de masurare, fundamentata pe unitatea de masura, arata ca a masura inseamna a stabili pe cale experimentala valoarea (numerica) a unei marimi fizice necunoscute masurand-o prin compararea cu o marime de aceeasi natura aleasa conventional ca unitate.
Uzual, masurarile sunt efectuate cu participarea unui operator uman, participare care se reflecta direct in obtinerea rezultatelor. Tinand cont de acest aspect, operatia de masurare ca o comparatie direct perceptibila a marimii de masurat cu unitatea nu este posibila decat intr-un numar restrans de cazuri in care unitatile pot fi realizate intr-o forma care sa permita utilizarea lor ca atare. Restrictiile apar, pe de o parte, datorita faptului ca exista numeroase marimi fizice care nu sunt accesibile simturilor umane, iar, pe de alta parte, chiar si in cazul celor care poseda aceasta proprietate numai un domeniu limitat de valori poate fi sesizat. Din aceste motive masurarile se efectueaza, in marea majoritate a cazurilor, cu ajutorul aparatelor de masurat. Astfel, prin aparat de masurat se intelege acel dispozitiv care stabileste o corespondenta intre marimea de masurat si o alta marime ce poate fi perceputa in mod nemijlocit de organele de simt umane, de o maniera care permite determinarea valorii marimi necunoscute in raport cu o anumita unitate de masura.
In cazul sistemelor automate conducerea proceselor efectuandu-se fara interventia directa a omului, mijloacele prin care se realizeaza-inclusiv cele care se refera la functia de informare-se modifica in concordanta cu noile conditii. In consecinta operatiile de masurare in sistemele automate sunt efectuate de traductoare, dispozitive care stabilesc o corespondenta intre marimea de masurat si o marime cu un domeniu de variatie calibrat, apta de a fi receptionata si prelucrata de echipamentele de conducere(regulatoare, calculatoare de proces, etc).
In cele de mai sus notiunea de traductor a fost definita in sensul atribuit in informatica. Ea este extinsa adesea si pentru a denumi elemente cu functiuni similare care intra in structura unor lanturi de masurare complexe utilizate in scopuri de cercetare, in laboratoare etc. si care nu sunt incluse intr-o bucla de reglare sau intr-un sistem de conducere cu calculator functionand on-line (desi pot fi asociate cu echipamente de calcul pentru prelucrarea automata a datelor).
O prima constatare, care se poate desprinde din cele mentionate si care rezulta si din examinarea diverselor modalitati de conducere automata a proceselor este aceea ca traductorul reprezinta un element tipic pentru structura oricarui sistem automat.
O a doua observatie importanta se refera la faptul ca, in cadrul analogiei intre conducerea manuala a proceselor si cea automata, se poate evidentia asemanarea intre functiile realizate de traductoare si aparatele de masurat.
Realizarea sistemelor de masurare a proceselor tehnologice moderne, necesita un flux de informatii de la marimile masurate si reglate, catre aparatele indicatoare, inregistratoare sau dispozitive de prelucrare a datelor.
Tensometria electrica e metoda de masurare a deformatiilor si a alungirilor unui corp solicitat, prin intermediul unor traductoare care transforma variatiile deformatiilor mecanice in variatii ale unor marimi electrice.
Ca metoda, tensometria electrica face parte din metodele generale de masurare pe cale electrica a marimilor neelectrice.
Tensometria electrica ale carei baze au fost puse cu aproximativ sase decenii in urma, a cunoscut o larga dezvoltare datorita importantelor avantaje pe care le prezinta:
- permite executarea de masurari in conditii reale de functionare a acestora;
- metoda e nedistructiva, deci nu sunt modificate forma si dimensiunile piesei sau structurii care sunt masurate;
- asigura prin folosirea aparaturii electronice, o sensibilitate si o precizie mult mai mare decat metodele mecanice, optice, acustice sau pneumatice;
- utilizarea aparatajului electronic, care este practic lipsit de inertie, permite masurarea si inregistrarea fenomenelor a caror variatie este rapida;
Traductoarele utilizate in tensometrie pot fi clasificate in functie de marimea electrica in care este tradusa marimea mecanica (traductoare rezistive, traductoare capacitive, inductive) sau in functie de marimea mecanica masurata (traductoare de deplasare, de deformatie specifica, de viteza, de acceleratie). Aceste criterii de clasificare nu se exclud intre ele: astfel, pentru masurarea unei deformatii pot fi folosite atat traductoare inductive, cat si capacitive iar cu un traductor inductiv se pot masura fie deplasari, fie acceleratii.
Lucrarea de fata isi propune sa realizeze proiectarea si executia tehnica a unui aparat de masura, cu afisare a marimii masurate pe monitorul unui calculator, capabil sa indice direct marimea greutatii masurate si evolutia in timp a marimii greutatii masurate. Ea este prezentata sub forma a sase capitole.
Primul capitol prezinta o introducere generala privind locul traductoarelor in sistemele de masurare.
Capitolul doi motiveaza necesitatea tratarii in continuare a tensometriei electrice precum si componenta lucrarii.
Capitolul trei prezinta unele aspecte generale ale constructiei captorului tensometric si diversele caracteristici ale acesteia.
Capitolul patru prezinta proiectarea schemei de masurare pe blocuri componente, descrierea circuitelor integrate specializate si functionarea acesteia.
In capitolul cinci am facut o prezentare generala a calculatoarelor numerice (componenta minimala intr+un sistem de masurare) si prezentarea softului implementat pentru schema de achizitie.
CAPTORUL TENSOMETRIC
3.1GENERALITATI
Un captor constituie una sau mai multe verigi ale unui lant de masurare a carui configuratie se prezinta in figura de mai jos.
J7hh
Fig. 3.1 Configuratia unui lant de masurare cu captor tensometric
Fata de aceasta situatie "standard" este posibil sa lipseasca anumite componente sau pot apare elemente suplimentare. De asemenea captorul insasi poate contine in afara celor doua componente fundamentale - elementul elastic si traductoarele rezistive - o serie de alte dispozitive sau subansamble. De remarcat este faptul ca lantul de masurare este relativ lung, calitatea procesului de masurare fiind dependenta de performantele lantului in ansamblu, care la randul lor depind de performantele fiecarei verigi componente.
Lantul de masurare nu este suficient sa functioneze oricum, ci in asemenea conditii incat sa asigure precizia impusa rezultatelor masurarilor. Pentru aceasta trebuie sa fie asigurata o anumita "omogenitate" a performantelor metrologice ale tuturor verigilor, adica acestea trebuie sa aiba anumite caracteristici bine precizate cantitativ. Pentru exemplificare se mentioneaza faptul ca precizia lantului in ansamblu va fi mai mica decat cea a verigii cu cea mai mica precizie. Aceasta inseamna ca precizia foarte ridicata a unei verigi - de exemplu a elementului elastic al captorului - nu va compensa precizia foarte mica a altei componente - de exemplu a puntii tensometrice.
In momentul cand se incepe studiul unui captor se presupune ca se cunosc toate caracteristicile de baza ale celorlalte verigi ale lantului de masurare, precum si ale lantului in ansamblu ceea ce va permite o evaluare cantitativa realista a caracteristicilor de baza pe care trebuie sa le aiba captorul. Daca nu se procedeaza astfel exista riscul realizarii unui captor mult mai precis decat este necesar si deci considerabil mai scump sau dimpotriva, un captor cu performante nesatisfacatoare, care va compromite calitatea procesului de masurare care ii este destinat.
Trebuie de mentionat faptul ca in comparatie cu alte tipuri de captoare - de exemplu cele inductive, piezoelectrice, capacitive, etc - cele cu traductoare rezistive au o suplete mult mai mare in ceea ce priveste integrarea lor in lantul de masurare.
3.2 CARACTERISTICILE PRINCIPALE
Interval nominal de masurare: intervalul de valori a marimii masurate, in care ea nu este afectata de erori ce depasesc erorile maxime ale clasei de precizie.
Intervalul maxim de utilizare: intervalul de valori a marimii masurate, in care exista o dependenta bine definita si reversibila intre sarcina si semnalul de iesire, dar in care poate sa apara o depasire a erorilor maxime tolerate ale clasei ei de precizie.
Intervalul maxim de incarcare: intervalul de valori a marimii masurate, in care nu apar modificari ireversibile a caracteristicilor ei, dar in care poate sa nu se mentina dependenta stabilita dintre sarcina si semnalul de iesire prin intrarea in actiune a dispozitivelor de protectie contra supraincarcarii.
Sarcina: marimea fizica de intrare a captorului ce produce un semnal(sau variatia unui parametru electric).Aceasta sarcina poate fi nominala, maxima de incarcare, minima de masurare, axiala, excentrica etc.
Fig. 3.2
Scala totala la iesire: diferenta algebrica intre semnalele de iesire ale captorului obtinute pentru sarcina nula si sarcina nominala;
Curba de etalonare: curba care reprezinta semnalul de iesire al captorului in functie de sarcina aplicata. Ea se determina pentru sarcini cunoscute, considerate drept etalon.
Liniaritatea: diferenta maxima Dm dintre curba de etalonare si o dreapta trasata intre punctele corespunzatoare sarcinii nule si sarcinii nominale.
Dm
Fig.3.3
Fidelitatea captorului: caracteristica acestuia de a da indicatii cu o variatie maxima cat mai mica, la masurarea aceleasi marimi, in conditii identice.
Precizia: caracteristica unui captor de a da indicatii cat mai apropiate de celei ale adevaratei valoria marimii pe care o masoara.
Sensibilitatea captorului: caracteristica acestuia de a pune in evidenta cele mai mici variatii ale sarcinii.
Pragul de sensibilitate: cea mai mica variatie a sarcinii care produce o variatie perceptibila a semnalului de iesire.
Histerezisul: diferenta maxima dintre semnalele de iesire obtinute pentru aceeasi sarcina aplicata mai intai crescator, pornind de la zero si apoi descrescator, pornind de la sarcina nominala.
Semnal de zero: marime electrica ce apare la iesirea celului de sarcina in absenta sarcinii aplicate la intrare si in prezenta marimii de alimentare.
Semnalul de iesire al captorului: variatia marimii electrice la bornele acestuia cand sarcina variaza. Aceasta poate fi o variatie de rezistenta, tensiune sau intensitate.
Fig. 3.4
Caracteristica de convertire liniara: caracteristica, avand forma unei drepte, ce trece prin valoarea semnalului de iesire la sarcina zero si prin valoarea semnalului de iesire la valoarea de 75%din sarcina nominala.
Banda de erori in regim static: campul corespunzator abaterii maxime a valorilor singulare de masurare la incarcare si descarcare fata de caracteristica de convertire liniara, in conditii de referinta. Se distinge o banda de erori in regim static pozitiva si negativa.
Eroare de calibrare a semnalului de iesire la sarcina nominala: diferenta dintre valoarea efectiva a semnalului de iesire la sarcina nominala si valoarea semnalului de iesire nominal.
Deriva: modificarea aleatorie nedorita a semnalului de iesire dupa o perioada de timp, modificare ce nu este o functie de sarcina
Deriva semnalului de zero sub influenta temperaturii: modificarea semnalului de zero dupa mentinerea captorului, pe parcursul unei durate de timp specificate la temperatura maxima de utilizare si revenirea la temperatura de referinta
Deriva semnalului de iesire la sarcina nominala sub influenta temperaturii: modificarea semnalului de iesire la sarcina nominala dupa mentinerea captorului, pe o durata de timp specificata la temperatura maxima de utilizare si revenirea la temperatura de referinta.
Efectul temperaturii asupra semnalului de zero: modificarea semnalului de zero sub influenta unei modificari a temperaturii ambiante, in intervalul nominal de temperaturi de utilizare.
Efectul temperaturii asupra semnalului de iesire la sarcina nominala: modificarea semnalului de iesire la sarcina nominala sub influenta unei modificari a temperaturii ambiante, in intervalul nominal de temperaturi de utilizare.
Efectul presiunii asupra semnalului de zero: modificarea semnalului de zero sub influenta unei modificari a presiunii atmosferice, in intervalul nominal depresiuni de utilizare.
Rezistenta de intrare: rezistenta electrica masurata intre firele carora se aplica excitatia (tensiunea de alimentare a captorului), firele de iesire fiind libere (neconectate).
Rezistenta de iesire: rezistenta electrica masurata intre firele de legatura ale captorului cu urmatoarea veriga a lantului de masurare, firele de intrare fiind libere.
Rezistenta de izolatie: rezistenta electrica intre circuit si masa captorului, de obicei masurarea efectuandu-se la 50V c.c. Eventual rezistenta de izolatie se defineste in functie de conditiile de mediu, de exemplu la imersarea captorului in apa pentru un anumit interval de timp.
3.3 CONSTRUCTIA CAPTORULUI TENSOMETRIC
Captorul tensometric intra in componenta sistemului de cantarire si dozare si este destinat masurarii maselor.
Fig. 3.5
Captorul tensometric de sarcina este alcatuit dintr-un element elastic pe care sunt lipite cu adeziv, 4 senzori rezistivi R1, R2, R3, R4 conectate din punct de vedere electric intr-o punte Wheastone.
Ansamblul e inchis intr-o cutie etansa ce protejeaza elementul elastic si senzorul rezistiv de actiunea umiditatii atmosferice si a agentilor chimici externi.
O membrana elastica asigura etansarea in partea superioara a cutiei fara a afecta valoarea fortei axiale F preluata de captor prin intermediul butonului.
Captorul tensometic furnizeza la iesire un semnal electric proportional cu forta aplicata si cu tensiunea de alimentare.
La aplicarea sarcinii, elementul elastic se deformeaza proportional cu aceasta. Sub actiunea fortei, fibra medie a elementului elastic de forma circulara, prin deformare capata o forma asemanatoare unei elipse, ca urmare pe directia transversala suprafata interioara se comprima iar cea exterioara se dilata. Aceasta este prima etapa de transformare.
Senzorii
rezistivi lipiti pe elementul elastic se deformeaza odata cu acesta, cele de pe
interior comprimandu-se si cele de pe exterior dilatandu-se. Un senzor rezistiv
avand rezistenta proprie R, supus unei deformatiei specifice +e isi modifica rezistenta cu
cantitatea ![]() DR, proportionala cu marimea acestei
deformatiei. Aceasta este a doua etapa de transformare.
DR, proportionala cu marimea acestei
deformatiei. Aceasta este a doua etapa de transformare.
Cei 4 senzori rezistivi se leaga in punte astfel incat semnalele lor sa se insumeze la iesire, crescand astfel sensibilitatea captorului.
3.4 ELEMENTE COMPONENTE ALE CAPTOARELOR
Acestea sunt urmatoarele:
Senzorul rezistiv
Elementul elastic
Lantul de masurare
Elemente anexe
A. PREZENTARE GENERALA.CONSTRUCTIE
Senzorul rezistiv este alcatuit dintr-un circuit metalic in forma de retea asezat pe un suport izolant subtire pe care sunt marcate niste repere pentru aliniere pe piesa testata, deasupra retelei se afla o imbracaminte izolanta ce lasa libere terminalele ce permit conectarea in circuitul electric.
Senzorul rezistiv folosit in tensometrie este un rezistor constituit din unul sau mai multi conductori -in majoritatea cazurilor metalici - legati in serie, de diametru foarte mic(0,02..0,03mm) avand o rezistenta ale caror valori sunt cuprinse de regula intre:
R=50W si R=1000W
Aceste traductoare au cea mai larga utilizare in tensometrie datorita simplitatii lor si a usurintei de aplicare pe piesa de masurat, respectiv costului redus al lucrarilor, precum si datorita preciziei si marilor posibilitati pe care le ofera in realizarea de masurari in cele mai complicate si dificile conditii de lucru si de incarcare.
Traductorul lipit pe piesa supusa cercetarii astfel incat sa urmareasca fidel deformatiile acesteia, sufera, prin deformare o variatie a rezistentei sale electrice.
Deci la baza utilizarii senzorul rezistiv sta fenomenul de variatie a rezistentei electrice a unui conductor datorita deformatiei sale mecanice, variatie ce e practic proportionala cu deformatia specifica suferita de aceasta odata cu piesa pe care este aplicat. Acest fenomen de variatie a rezistentei electrice a unui conductor prin deformatia sa mecanica sta la baza utilizarii. senzorului rezistiv.
 l
l
Fig. 3.6
Se stie ca rezistenta electrica R a unui fir de sectiune constanta este:
R=r![]() (1)
(1)
unde
r -rezistivitatea materialului firului, in Wm;
l -lungimea firului, in m;
S -sectiunea firului, in m2.
Logaritmand si diferentiind relatia de mai sus, rezulta:
 (2)
(2)
care pentru o variatie finita a marimilor devine:
 (3)
(3)
In aceasta relatie facem notatiile:
![]() si
si ![]() ,unde m este coeficientul lui Poisson.
,unde m este coeficientul lui Poisson.
Pentru evaluarea termenului Dr se aplica, in mod curent legea lui Bridgman:
![]() (4)
(4)
unde:
c - este o constanta a materialului(denumita constanta lui Bridgman) a carei valoare este determinata experimental, prin incercari de intindere a firelor;
v -
volumul firului(v=![]() )
)
Tinand seama ca : ![]()
Relatia de mai sus devine:
![]() (5)
(5)
Relatia (5) este aproximativa, deoarece r nu depinde numai de volum ci si de orientarea cristalelor materialelor, de fapt valorile lui c difera dupa directiile de cristalizare.
Un rationament mai riguros are la baza legea lui Ohm aplicata unui cristal cubic supus unei solicitari, cu deformatii mici si care se exprima prin formula:
Ei=rij![]() li (dij pijk
li (dij pijk![]() Tkl)
Tkl)
unde:
- EI este campul electric,
- lI este densitatea de curent,
rij este rezistivitatea,
sij este un tensor metric fundamental(simbolul lui Kroneker)
pijkl este un tensor de ordinul patru numit tensorul coeficientilor de
piezorezistenta,
- Tkl este tensorul tensiunii.
Variatia rezistivitatii pe directia j este:
 (7)
(7)
In cazul unui fir, solicitarea fiind monoaxiala, se obtine:
![]() =p T=pr pE
=p T=pr pE![]() (8)
(8)
unde:
p este coeficientul de piezorezistenta;
E este modulul de elasticitate.
Comparand relatiile (8) cu (5) rezulta ca:
c(1-2m pE
Deci relatia (3) poate fi scrisa sub forma:
![]() =(1+2m pE)
=(1+2m pE)![]() (9)
(9)
Raportul dintre variatia specifica a rezistentei si deformatiei specifice e se noteaza obisnuit cu k si se numeste coeficientul de tensosensibilitate al firului si are valoarea:
 (10)
(10)
Acest coeficient depinde in principiu, de material. Pentru anumite
aliaje, ca de exemplu constantan sau nichel-crom la care m=0,3 si pE![]() 0,4
(ceea ce conduce la c=1,pentru constanta Bridgman) se obtine k=2, valoare
rezultata si din determinarile experimentale.
0,4
(ceea ce conduce la c=1,pentru constanta Bridgman) se obtine k=2, valoare
rezultata si din determinarile experimentale.
Coeficientul de tensosensibilitate depinde si de modul de prelucrare a firului, de tratamentul termic si mecanic, precum si de diametrul firului (el scade odata cu cresterea diametrului).
De asemenea, valoarea coeficientului se modifica in cazul cand firul este aplicat pe un suport, pentru a forma reteaua unui traductor, si este influentata de dimensiunile traductorului.
De aceea, valoarea acestui coeficient se determina experimental pentru fiecare lot de traductoare in parte.
In acest caz, coeficientul K definit de relatia
K=![]() (11)
(11)
este denumit constanta traductorului.
B. PROPRIETATILE TRADUCTORILOR SI FACTORII CARE II
INFLUENTEAZA
Liniriatatea
Principala proprietate a traductorilor rezistivi este liniaritatea, adica pastrarea unei relatii liniare intre variatia relativa a rezistentei electrice DR R si alungirea specifica e, pana la anumite limite ale lui e. Cat timp aceasta relatie este liniara, constanta traductorului k ramane neschimbata.
Liniaritatea este conditionata de proprietatile elastice ale celor trei elemente componente ale traductorului: elementul sensibil, adezivul si suportul izolant.
Experimental s-a observat ca in special adezivul si suportul de hartie manifesta un histerezis, tradus prin aceea ca curbele de descarcare nu se suprapun cu cele de incarcare. Pentru traductorul tensometric, liniaritatea se studiaza prin trasarea caracteristicii DR/R in functie de e. Dupa executarea a 3-4 cicluri incarcare-descarcare se observa ca buclele de histerezis dispar. Se recomanda deci ca, inainte de inceperea unei masuratori, sa se execute 3-4 cicluri de incarcare pana la sarcina maxima si descarcare. Daca se creste deformatia se constata cresterea fenomenului de histerezis si abateri mari de la liniaritate. Pentru masurarea de deformatii mari, de exemplu la materiale plastice, trebuie sa se utilizeze traductori de constructii relativ speciale, care pot masura chiar deformatii de 10%.
Efectul temperaturii
Rezistenta ohmica a traductorilor tensometrici variaza in limite mari cu temperatura. Neglijarea acestui efect poate cauza erori atat de mari incat masurarea tensometrica sa fie compromisa.
a) Efectul variatiei temperaturii asupra rezistentei traductorului
Un traductor tensometric este lipit pe o piesa metalica, nesolicitata. Daca ansamblul piesa-traductor este supus unei variatii de temperatura Dt, are loc o variatie relativa a rezistentei electrice:
![]() ar+k ap at Dt (1)
ar+k ap at Dt (1)
unde:
ar =coeficient de variatie al rezistentei ohmice a traductorului cu temperatura;
ap =coeficient de dilatare termica liniara al piesei pe care este lipit traductorul;
at = coeficient de dilatare termica al traductorului;
k= constanta traductorului tensometric.
Primul termen din paranteza reprezinta variatia rezistentei ohmice cu temperatura. Al doilea termen din paranteza reprezinta variatia rezistentei ohmice in urma dilatarii inegale a piesei si a firului traductorului.
Se observa ca, pentru un traductor dat, cest termen este in functie de coeficientul de dilatare ap al piesei; prin urmare efectul temperaturii asupra unui traductor tensometric variaza dupa materialul piesei studiate.
Este util de mentionat faptul ca pentru traductorii cu semiconductori valorile alungirii aparente datorita efectului variatiei temperaturii sunt comparabile cu cele ale traductorilor cu sarma sau folie. Schimbarea rezistentei traductorului produse de variatia de temperatura este aceeasi atat pentru semiconductorul de tip n, cat si pentru cel de tip p.
b) Efectul variatiei temperaturii asupra constantei traductorului
in general, constanta traductorului tensometric ramane neschimbata in limitele de utilizare a acestuia, date de catre constructor. La cresterea temperaturii peste o limita anumita, are loc o inmuiere a adezivului dintre fir si suport sau a celui dintre traductor si piesa, ceea ce permite alunecari intre piesa si traductor. Ca urmare, deformatia piesei nu mai este transmisa in intregime traductorului, iar deformatia traductorului si deci variatia rezistentei DR/R este mai mica decat cea corespunzatoare deformatiei reale a piesei.
Din relatia:
e=![]() (2)
(2)
se vede ca daca numaratorul DR/R are valoare mai mica decat cea reala, pentru ca e sa fie masurat corect, trebuie ca si numitorul k sa scada cu temperatura. Trebuie precizat ca fenomenul de variatie al constantei k cu temperatura este cu totul diferit de fenomenul examinat in paragraful anterior.
Vom analiza variatia lui k cu temperatura. In figura de mai jos s-au redat o serie de curbe care arata variatia constantei traductorului cu temperatura. Curbele marcate cu litera A urmata de o cifra se refera la traductorul Baldwin cu fir din aliaj de cupru si nichel; litera B arata ca traductorul are firul lipit cu bachelita pe suport; litera C se refera la traductorul Baldwin cu fir di elinvar; curba P se refera la traductorul cu adeziv tip GM4479 (Philips); curba H este pentru traductorul Tepic B2.
Se observa ca toti acesti traductori au practic valoare constanta pentru k pana la 60oC; mai sus, la diferite temperaturi functie de adezivul traductorului, apare scaderea brusca a lui k, indicand limita de temperatura la care traductorul mai poate fi folosit.
Fig.3.7
c) Sensibilitatea la temperatura
Se stie ca rezistenta electrica a unui conductor variaza cu temperatura. In tensometria electrica acest fenomen complica incercarile deoarece aparatul de masura inregistreaza variatia de rezistenta electrica fara a putea deosebi pe cea datorita sensibilitatii la deformatii de cea datorita variatiei de temperatura.
Pentru scaderea erorii de temperatura se utilizeaza materiale cu coeficienti de temperatura scazuti precum si traductoare compensate termic. Desi exista metode de compensatie a influentei variatiei temperaturii este de dorit ca materialul din care se executa traductorul sa fie cat mai putin sensibil la variatii de temperatura. Materialele cu sensibilitate mare la deformatie (isoelastic, platina) sunt foarte sensibile si la variatii de temperatura in timp ce constantanul, desi mai putin sensibil la deformatie, prezinta avantajul unei sensibilitati reduse la variatia de temperatura. Aceasta hotaraste alegerea materialului sensibil in functie de domeniul de utilizare al traductorului; pentru solicitari statice, la care sarcina se mentine constanta, in timp ce temperatura poate varia, se utilizeaza constantanul; pentru solicitari dinamice se prefera materialul de tip isoelastic, deoarece variatia de rezistenta datorita aplicarii sarcinii este mare, iar influenta temperaturii, care variaza, lent in timp, nu poate modifica esential semnalul electric produs de variatia foarte rapida a sarcinii.
Solutia generala pentru compensarea erorii cu temperatura o constituie insa conectarea traductorului tensometric in schema de punte in regim neechilibrat cu 1, 2 sau 4 traductoare. Cea mai utilizata este schema de punte cu patru traductoare active fixate pe un corp elastic astfel incat la aplicarea marimii neelectrice doua traductoare se alungesc, deci variatie +DR, iar a doua se contracta, deci variatie -DR.
Efectul umiditatii
Umezeala este daunatoare traductorilor tensometrici. In primul rand, datorita umezelii au loc suntari ale traductorului, fie prin scurgeri de curent intre firele retelei lui, fie prin scurgeri de curent intre taductor si masa metalica piesei pe care el este lipit. In al doilea rand umezeala are efect defavorabil asupra stratului de adeziv dintre traductor si piesa, micsorandu-I rezistenta de izolatie, deci provocand curenti de scurtcircuit. In al treilea rand, umezeala scade rezistenta mecanica a unor adezivi, in special a celor pe baza de celuloza, permitand alunecari intre traductor si piesa. Astfel de lunecari duc la schimbarea punctului de zero, deci la instabilitatea puntii, in special cand este vorba de masurari statice de durata. Din contra, pentru masurari dinamice, aceste lunecari nu sunt daunatoare. Umezeala foarte puternica, repectiv asezarea traductorului in apa duce la scurtcircuitarea lui s-au la dezlipirea de pe piesa.
In general, umezeala normala din atmosfera, pe timp senin sau pe timp putin noros, nu sunt daunatoare. De asemenea, gradul de umiditate din incaperi fara atmosfera acida (ateliere, hale, laboratoare, etc) nu deranjeaza masuratorile tensometrice. Daca masurarea se face pe timp noros cu umiditate foarte mare, trebuie sa se ia masuri de protectie; acest lucru este necesar cand se fac masuratori de lunga durata pe constructii in aer liber.
De asemenea, daca conductorii traductorilui sunt parcursi de curent timp indelungat, sunt necesare masuri de protectie contra umezelii, spre a evita fenomene de coroziune electrolitica.
Traductorul tensometric are o izolatie buna atunci cand rezistenta de izolatie intre conductorii sai si masa metalica a piesei pe care este lipit are valori intre 1.000 si 10.000 MW. Daca la sfarsitul perioadei de uscare un traductor a avut o rezistenta de izolatie ridicata, iar ulterior aceasta coboara mult, este un indi8ciu al efectului umezelii. In acest caz, trebuie procedat la o noua uscare a traductorului, spre a realiza o izolatie corespunzatoare.
Efectul deformatiei transversale
Traductorul tensometric in serpentina are o serie de bucle, de obicei semicirculare, la fiecare intoarcere a firului. De-a lungul acestor bucle, firul rezistent are directie variabila fata de axa longitudinala a traductorului. Ca urmare, traductorul tensometric este sensibil si la deformatii transversale perpendiculare pe axa sa, adica perpendicular pe directia sa de masurare.
Se adopta urmatoarele notatii: DR R variatia relativa a rezistentei traductorului, ex deformatia specifica perpendiculara pe axa traductorului, k constanta traductorului, determinata experimental prin incercari de intindere simpla, kx constanta axiala a traductorului, determinata in cazul unei deformatii transversale nule, kt constanta transversala a traductorului, determinata in cazul unei deformatii axiale nule. Cu aceste notatii, relatia uzuala:
 (1)
(1)
poate fi exprimata sub forma:
 (2)
(2)
care arata ca variatia de rezistenta se datoreste atat deformatiei axiale cat si celei transversale.
Ultima relatie se mai poate scrie:
 (3)
(3)
si prin egalare cu prima rezulta:
![]() (4)
(4)
Evident in conditii de temperatura date, kt si kx sunt constante ale traductorului. Se observa ca valoarea lui k depinde de raportul et ex , deci de starea de eforturi unitare care se masoara.
Pentru
cazul cand masuratoarea se face pe o piesa solicitata la intindere se stie
ca ![]() ceea ce face ca relatia de mai sus sa devina:
ceea ce face ca relatia de mai sus sa devina:
![]() (5)
(5)
Prin urmare, chiar in cazul unei masuratori pe o piesa solicitata la intindere, constanta k poate varia dupa valoarea coeficientului m al materialului de studiat. Pentru stari plane de eforturi unitare, unde deformatia et poate avea diverse valori, valoarea masurata a lui DR/R, deci a lui ex, poate suferi erori. Aceste erori pot fi luate in considerare, in calcul, daca se da raportul kt/kx ce caracterizeaza sensibilitatea transversala a traductorului.
De obicei, insa acest raport nu este cunoscut la oricare traductor. Valori medii pentru traductorul cu fir cu grila plana sunt:
c=kt kx=0.012.0.02 (6)
C. MATERIALE UTILIZATE PENTRU CONFECTIONAREA TRADUCTOARELOR TENSOMETRICE
Acestea trebuie sa aiba:
- relatie liniara intre variatia rezistentei si a deformatiei mecanice, intr-un domeniu cat mai mare;
- coeficientul de tensosensibilitate cat mai ridicat;
- histerezis nul;
- rezistenta specifica mare;
- coeficient de variatie a rezistentei cu temperatura cat mai mic;
- coeficient de dilatare liniara cat mai aproape de cel al materialului din care este confectionata piesa sau structura supusa cercetarii;
- usurinta la prelucrarea si executarea legaturilor electrice;
- limita de elasticitate cat mai ridicata;
Nici un material nu corespunde integral acestor conditii. Fiecare, in anumite domenii, mai mici sau mai mari, ale deformatiei specifice, prezinta o legatura liniara intre acestea si variatia rezistentei (coeficientul K constant).
Nichelul are un coeficient de tensosensibilitate ridicat, dar prezinta histerezis in modificarea rezistentei functie de deformatii; aliajul crom-nichel are un coeficient de variatie a rezistentei relativ ridicat.
Constantanul este unul din materiale care indeplineste majoritatea conditiilor enumerate mai sus si de aceea este folosit frecvent la confectionarea traductorului tensorezistiv, desi are un coeficient de tensosensibilitate de valoare mai mica decat alte materiale.
Prin tratament termic de recoacere (incalzire in vid la circa 650C timp de trei ore si o racire lenta in cuptor) se poate obtine o marire a coeficientului de tensosensibilitate si a domeniului de liniaritate. Daca sarma de constantan este nerecoapta, atunci coeficientul de tensosensibilitate ramane constant.
D. CARACTERISTICI ALE TRADUCTOARELOR REZISTIVE
Acestea sunt urmatoarele:
- tipul retelei: fir sau folie
- dimensiunile retelei: pentru traductoare din folie metalica intereseaza in special lungimea activa l0, ce reprezinta baza de masurare a traductorului. Se confectioneaza senzorul rezistiv cu l0=0,2...200mm, frecvent utilizandu-se traductoare cu l0=100mm;
- materialul suportului: hartie, rasina epoxidica, acrilica, fenolica. De natura acestui material depinde tipul de adeziv ce se poate utiliza la aplicarea traductorului pe piesa.
- dimensiunile suportului: sunt de obicei de 1,5.2 ori mai mari ca ale retelei.
- rezistenta electrica a traductorului, care este cuprinsa pentru diverse tipuri de traductoare intre 50..1000W valori uzuale sunt:120, 240, 360 si 500W; cand este necesar se pot face traductoare cu rezistenta si mai mare (pana la 5000W). Pentru a se putea obtine o astfel de rezistenta electrica a traductorului fara ca firul rezistiv sa aiba lungime mare trebuie sa se utilizeze material cu rezistivitate mare si diametrului firului sau grosimea foliei din care se face elementul sensibil sa fie cat mai mica. Dimensiunile obisnuite pentru diametrul firului sunt intre 0,020.0,030mm,iar grosimea foliei 0,001.0,012mm.
- constanta k a traductorului, care functie de tipul traductorului poate avea valori intre 1,6.3,6 (uzual k=2);
- domeniul de temperatura in care se poate utiliza traductorul, domeniu ce depinde atat de adeziv cat si de materialul suportului si felul solicitarii. In general, orice traductor poate fi utilizat pana la temperaturi de 60oC.Limita superioara a temperaturii poate fi ridicata la masurari dinamice cu circa 20oC peste cea prescrisa pentru masurari statice;
3.4.2 ELEMENTUL ELASTIC
O clasificare sumara a elementelor elastice dupa tipul solicitarii este data in tabelul de mai jos. Sunt analizate trei elemente elastice cu sectiuni clasice (circulara, dreptunghiulara, inelara), supuse la solicitari simple (intindere-compresiune, incovoiere, rasucire). Pentru fiecare caz se dau formulele de calcul ale deformatiilor specifice dupa directia de calcul ale deformatiilor specifice dupa directiile principale. In formula intervin forta axiala N, momentul incovoitor M i =Px, respectiv momentul de rasucire Mt, dimensiunile geometrice ale sectiunilor (b, h, D, d), modulul de elasticitate longitudinal E (Young) si cel transversal G.
|
Solicitarea |
Amplasarea TER pe elementul elastic |
Deformatia specifica |
|
(compresiune) |
|
|
|
Inc7ovoiere |
|
|
|
Rasucire |
unde: |
Se
observa ca, in cazul intinderii si incovoierii, directia principala 1 este in
lungul axei elementului elastic, in timp ce directia principala 2 este
perpendiculara pe prima. Masurarea momentului de rasucire se face pe baza celor
demonstrate in teoria elasticitatii, anume ca pe directii la 45o
fata de axa arborelui se produc tensiuni de intindere, respectiv de
compresiune, egale cu cea de rasucire (t=![]() s
s
In general, orice element elastic este sensibil la mai multe tipuri de solicitare simultan, incat TER amplasat pe el indica o deformatie corespunzatoare fiecarei solicitari in parte. Separarea componentelor deformatiei specifice complexe se poate face numai daca in sectiunea respectiva se aplica mai multe traductoare. In cazul particular al sectiunilor cu axe de simetrie, cand axa neutra coincide cu una din aceste axe, se poate masura direct o anumita componenta a deformatiei specifice, daca amplasarea TER in sectiune si conectarea lor in bratele puntii tensometrice se face tinand seama de proprietatile puntii Wheatstone de a aduna algebric variatiile rezistentelor din acelasi brat sau din brate opuse si de a scadea algebric variatiile rezistentelor din brate adiacente.
3.4.3 LANTURI DE MASURA UTILIZATE IN TENSOMETRIE
Prin aplicarea din ce in ce mai larga a tensometriei electrice ca metoda de cercetare experimentala, fabricile constructoare au acordat o atentie mereu sporita aparaturii de masura inregistrandu-se astfel o puternica dezvoltare atat sub aspect calitativ cat si sub cantitativ.
In studiul actual, aparatura folosita in tensometria electrica realizeaza
performante superioare reprezentand urmatoarele avantaje:
- are o durata de functionare si o fiabilitate mai mare decat a aparaturii mecanice;
- reduce mult durata uni ciclu de masuri, fata de alte metode;
- permite inregistrarea si transmiterea la distanta a rezultatelor obtinute, rezultate care, ulterior sau chiar in timpul efectuarii masurii, pot fi centralizate, stocate si prelucrate; aceste rezultate pot fi redate si prelucrate in forma digitala;
- permite adaptarea altor instalatii electrice in scopul supravegherii, inregistrarii si reglarii automate a unor procese.
Procesul de masurare se realizeaza cu o serie de aparate si dispozitive care constituie la un loc lant de masura.
In tensometria electrica orice lant de masura este in principiu alcatuit din trei parti principale:
- traductorul, respectiv captorul;
- amplificatorul tensometric ;
- dispozitivul (aparatul) de evaluare a marimii masurate.
In afara de acestea, instalatia tensometrica poate fi completata in cazul in care natura masurarii o cere, cu diverse dispozitive(aparate) auxiliare: cutii de comutare(manuala sau automata), filtre, modulatoare, etc.
Posibilitatile de utilizare a traductoarelor, respectiv a captoarelor in cazul masurarilor diverselor marimi mecanice sunt multiple si reprezinta urmatoarele avantaje:
- toate tipurile de traductoare pot fi cuplate la amplificatoarele tensometrice cu frecventa purtatoare;
- majoritatea tipurilor de traductoare pot fi cuplate si la amplificatoarele de curent continuu, exceptie fac traductoarele pasive care nu sunt rezistive.
Puntea tensometrica, intelegand prin aceasta atat schema de conectare a senzorilor rezistivi in punte Wheastone, cat si - mai general - amplificatorul specific masurarilor tensometrice, se poate alimenta in c.c sau c.a.
Avantajele alimentarii in c.a. (cu frecventa purtatoare) sunt urmatoarele:
raport semnal zgomot mai mare;
sensibilitate redusa la interferenta electromagnetica;
insensibilitate la efectul termoelectric;
circuit de iesire independent electric de cel de intrare.
Avantajele alimentarii in curent continuu sunt urmatoarele:
sursa mai stabila cu reglaj mai bun;
stabilitate mai buna a amplificarii in timp si cu temperatura;
erori de neliniaritate mai mici (caracteristica de transfer mai liniara);
banda mai larga de frecventa pentru masurari dinamice;
disparitia echilibrarii capacitive;
eliminarea influentei rezistentei cablului de legatura dintre captor si amplificator;
posibilitatea functionarii in tensiune constanta sau in curent constant.
Tendintele actuale sunt in favoarea alimentarii in curent continuu, in regim de curent constant.
3.4.4 ELEMENTE ANEXE
Elementele anexe - mecanice si electrice - au rolul ca, impreuna cu cele principale (TER lipite pe elementul elastic si circuitele electronice din cadrul lantului de masurare) analizate anterior, sa asigure buna functionare a captorului.
a. Dispozitive auxiliare electrice
Aceste dispozitive faciliteaza trecerea semnalelor utile spre amplificatorul tensometric, fiind asadar elemente pentru conexiuni. In ordinea amplasarii in fluxul informational, elementele anexe electrice sunt urmatoarele:
contacte intermediare;
circuite imprimate pentru TER;
conectori de diverse tipuri;
cabluri pentru masurari.
b. Dispozitive auxilare mecanice
protectia traductoarelor si a conexiunilor terminalelor;
carcasa captorului;
dispozitivul de incarcare si rezemare
dispozitivele de protectie impotriva suprasarcinilor
dispozitivele de preluare a solicitarilor transversale
3.5 CARACTERISTICILE CAPTORULUI TENSOMETRIC
Caracteristicile tehnice ale captorului tensometric folosit sunt urmatoarele:
tipul dozei : DT 200;
tipul solicitarii: compresiune;
clasa de precizie: 0,1; 0,2;
semnal nominal de iesire: 2mV/V
rezistenta nominala: 350W
tensiunea de alimentare: 5.10 V;
eroarea de calibrare: 0,1%, 0,2%;
eroarea de neliniaritate: 0,07%, 0,14%;
eroarea de histerezis: 0,1%, 0,2%;
eroarea de repetabilitate: 0,03%, 0,06%;
deriva termica a semnalului nominal la iesire: 0,1% 10oC,
deriva termica a zeroului: 0,14%/10oC;
domeniul nominal de temperatura: -10.+50OC;
domeniul limita al temperaturilor de functionare: -30.+70OC;
suprasarcina admisibila: 150%;
rezistenta de izolatie: minim 3500W
3.6 ADAPTOARE PENTRU PUNTI TENSOMETRICE
3.6.1. PUNTEA TENSOMETRICA
Pentru realizarea unei masurari precise, in practica tensometriei electrice, se foloseste montajul in punte al traductoarelor.
Relatiile de baza din tensometria electrica ce exprima legatura liniara dintre deformatii si variatia parametrului electric, si data de traductorul electric de masura, pune usor in evidenta elementele componente ale circuitului de masura.
Astfel in cazul utilizarii traductorului rezistiv, pentru a fi posibila masurarea unei alungiri de exemplu e= 10-6.10-3 cu un traductor cu rezistenta electrica R=100W si k=2 este necesar un circuit de masura care sa sesizeze variatia de rezistenta
DR=KRe=![]() 2(10-6.10-3)=0,0002.0,2
W
2(10-6.10-3)=0,0002.0,2
W
Practic este greu sa se masoare, cu suficienta precizie, asemenea variatii de rezistenta cu ohmetre obisnuite, fapt care impune utilizarea unui montaj electric in punte, montaj ce poate sa asigure precizia dorita.
Puntea devine astfel elementul principal al oricarui aparat pentru masurari tensometrice.
Senzorii tensiometrici se pot conecta in punte in mai multe moduri:
Punte completa cu doi senzori activi: pe o piesa solicitata la intindere se lipesc alaturat doi senzori activi in doua brate opuse (R1 si R3) iar in celelalte brate se introduc doi compensatori;
Fig. 3.8
Traductorii fiind alaturi pe piesa (DR1=DR3) in timp ce pentru traductorii compensatori DR2=DR4=0
Semipunte cu doi senzori activi: daca pe o bara solicitata la incovoiere se lipeste deasupra un traductor R1, solicitat la intindere, iar dedesupt unul R4 solicitat la compresiune, ambii formand o semipunte atunci DR1= -DR4.
Fig. 3.9
Semnalul la iesire din punte devine dublul realizandu-se simultan si compensarea variatiei de temperatura.
punte completa cu 4 senzori activi: pe piesa se lipesc patru traductoare din care doua (R1, R3) solicitati la intindere iar doua (R2, R4) solicitati la compresiune.
Fig. 3.10
Daca DR1=DR3= -DR2= -DR4, semnalul obtinut la iesirea puntii creste de patru ori si in acelasi timp este realizata si compensarea termica.
puntea completa cu 8 sau 16 senzori: pentru realizarea unor captori de forte se pot lega in punte 8 sau 16 traductoare active, fiecare brat fiind format din 2 sau 4 traductori legati in serie. La astfel de montaje semnalul creste tot de 4 ori deoarece intre cele 4 brate ale puntii se mentine aceeasi relatie ca si la cea cu 4 traductoare.
Fig. 3.11
Cel mai simplu montaj in punte, si cel mai adecvat pentru a sesiza micile variatii de rezistenta ale marcilor tensometrice in procesul de masurare (10-4W), este puntea Wheastone (varianta completa).
Senzorii tensometrici se amplaseaza in cele patru brate ale puntii. Pe diagonala de alimentare (in c.c sau c.a.) se aplica o tensiune constanta U iar pe diagonala de masurare se obtine semnalul de iesire, conectat la un galvanometru. Acest semnal in metoda puntii dezechilibrate, ideale pentru captoare, e o expresie directa a variatiei rezistentelor din bratele active ale puntii.
Daca rezistentele puntii satisfac conditia:
![]() (1)
(1)
atunci prin galvanometru nu trece curent (Ig=0), puntea este echilibrata.
Orice
modificare suferita de una din cele patru rezistente va afecta starea de
echilibru a puntii, avand ca urmare trecerea prin galvanometru a lui Ig![]() 0,
curent a carui valoare va caracteriza aceasta modificare de rezistenta.
Pastrarea echilibrului si a liniaritatii relatiei
0,
curent a carui valoare va caracteriza aceasta modificare de rezistenta.
Pastrarea echilibrului si a liniaritatii relatiei ![]() DR R=
DR R=![]() si evitarea deteriorarii traductorului tensometric aplicat pe piesa de masurat
sunt asigurate atat timp cat intensitatea curentului care trece prin traductor
nu provoaca o incalzire excesiva a acestuia. De aceea se limiteaza aceasta
intensitate la valoarea It=20.30 mA, ea determinand - functie si de
valoarea rezistentei din bratele puntii - marimea tensiunii U aplicate la
bornele A, C ale diagonalei de alimentare.
si evitarea deteriorarii traductorului tensometric aplicat pe piesa de masurat
sunt asigurate atat timp cat intensitatea curentului care trece prin traductor
nu provoaca o incalzire excesiva a acestuia. De aceea se limiteaza aceasta
intensitate la valoarea It=20.30 mA, ea determinand - functie si de
valoarea rezistentei din bratele puntii - marimea tensiunii U aplicate la
bornele A, C ale diagonalei de alimentare.
Intensitatea curentului Ig care trece prin galvanometru in cazul dezechilibrarii puntii se obtine din relatia:
 (2)
(2)
Cu ajutorul acestei relatii se vor putea analiza majoritatea problemelor legate de metodele de masurare cu puntile tensometrice.
Deoarece semnalul electric dat de traductorul tensometric este foarte mic (slab) , este necesara amplificarea acestui semnal; amplificatorul tensometric (numit si punte tensometrica) are rolul de a amplifica si transforma, eventual, semnalul receptionat de la traductor astfel incat sa poata actiona, la iesirea lui, un instrument de masura sau un aparat de inregistrare.
Amplificatoarele tensometrice trebuie sa reproduca fidel la iesire semnalul primit la intrare, deci ele trebuie sa indeplineasca doua conditii:
sa nu introduca distorsiuni; pentru aceasta aparatul trebuie sa aiba o plaja suficient de mare pentru a se evita producerea distorsiunilor neliniare si in acelasi timp sa aiba o banda de trecere suficient de larga pentru evitarea distorsiunilor liniare (dependente de frecventa fenomenului);
sa nu fie sensibile la influente perturbatoare externe; pentru aceasta, la realizarea constructiva a amplificatorului trebuie sa se ia masuri de evitare a influentelor parazitilor atmosferici si a celor din reteaua electrica de alimentare; de asemenea trebuiesc luate masuri pentru variatia tensiunii de alimentare si variatia temperaturii mediului ambiant sa nu afecteze rezultatele masurilor.
PROIECTAREA AMPLIFICATORULUI TENSOMETRIC
La acest tip de amplificatoare puntea de traductoare este alimentata cu curent continuu, iar semnalul amplificat este tot un curent continuu a carei valoare e proportionala cu semnalul dat de traductoare.
Acest tip de amplificator este o realizare recenta. Spre deosebire de alte amplificatoare cu care s-au obtinut rezultate relativ bune in exploatare, amplificatoarele de curent continuu realizate cu semiconductoare au dat randament mai bun in ultima perioada.
 Schema
bloc a acestui tip relativ nou de amplificator tensometric este prezentata in
figura urmatoare:
Schema
bloc a acestui tip relativ nou de amplificator tensometric este prezentata in
figura urmatoare:
Puntea de traductoare e alimentata cu curent continuu, la bornele diagonalei de alimentare aplicandu-se tensiunea Ua.
Se presupune (este vorba de cazul ideal) ca amplificatorul nu absoarbe curent; rezistentele fixe R1..R4 se aleg mult mai mari decat R (rezistenta traductorului).
In aceasta situatie Uint=0; rezistentele R1 si R2, respectiv R3 si R4 constituie doua divizoare de tensiune, astfel incat se pot scrie relatiile:
 (1)
(1)
 (2)
(2)
Deoarece, conform ipotezei Uint=0, rezulta ca:
 (3)
(3)
In motaje uzuale, pentru simetrizare, se alege la proiectare R1=R3 si R2=R4 astfel incat relatia de mai sus devine:
 (4)
(4)
Din figura rezulta DU=U1-U2 asa incat ultima relatie se poate scrie sub forma:
![]()
 (5)
(5)
Relatia
exprima proportionalitatea dintre Uies si semnalul ![]() DU obtinut la bornele diagonalei de masura a puntii
de traductoare.
DU obtinut la bornele diagonalei de masura a puntii
de traductoare.
Factorul de proportionalitate R2/R1 ramane constant pentru un anumit domeniu de masurare; dand diferite valori lui R1 si R3, prin comutarea unor rezistente fixe, se obtin diferite domenii de masura pentru semnalul DU care urmeaza sa fie amplificat.
Amplificatoarele tensometrice de curent continuu prezinta urmatoarele avantaje:
prezinta o mare stabilitate a amplificarii datorita reactiei negative;
realizeaza o buna compensare a perturbatiilor provocate de campul electric exterior datorita intrarii simetrice fata de pamant a amplificatorului tensometric; campurile magnetice perturbatoare nu sunt insa compensate;
prezinta o liniaritate foarte buna a semnalului de iesire in ceea ce priveste variatia amplitudinii I frecventei semnalului de intrare;
au o banda de trecere foarte larga a blocului amplificator, datorita reactiei negative.
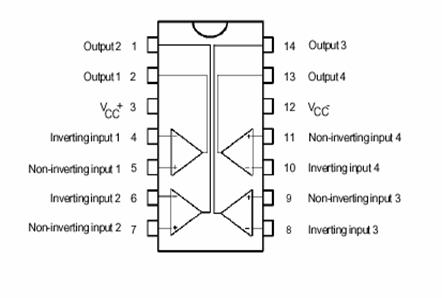
Amplificatoarele de curent continuu sunt realizate ca amplificatoare diferentiale. In acest scop am ales, amplificatorul bM 108.
bM 108 - descriere generala
Este un amplificator
operational de precizie
avand curenti de polarizare si tensiuni de ofset suficient de reduse pentru a
evita compensarile de ofset. Circuitele functioneaza alimentate la tensiuni
cuprinse intre ![]() 2
V si
2
V si ![]() 18
V, utilizand acelasi tip de compensare in frecventa.
18
V, utilizand acelasi tip de compensare in frecventa.
Dintre caracteristicile notabile ale circuitului amintim:
tensiune de ofset: maxim 0,5 mV;
curent de polarizare: maxim 3 nA;
ofsetul curentului de polarizare mai mic de 400 pA;
deriva
termica maxima: 1![]() V oC;
V oC;
curent
de alimentare: 300 ![]() A.
A.
Valorile limita ale circuitului:
tensiunea
de alimentare: ![]() 20
V;
20
V;
curentul
de intrare diferential: ![]() 10
mA;
10
mA;
tensiunea
de intrare: ![]() 15
V;
15
V;
gama temperaturilor de functionare: -55oC.+125OC;
temperatura jonctiunii: +150oC;
puterea disipata: 500 mW;
rezistenta termica jonctiune ambiant: 200oC W.
pentru compensarea ofsetului
Descrierea terminalelor :
N.C.=neconectat
Fig. 4.2
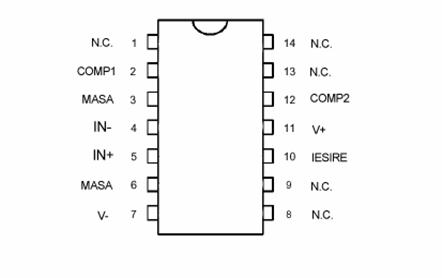
Amplificator operational bM 108 in montaj diferential amplifica semnalul generat de doza tensometrica in plaja 0.2 V.
PROIECTAREA CONVERTORULUI DE MASURARE
Un convertor analog-numeric este un dispozitiv de codificare care, avand la intrare o tensiune analogica Ux si o tensiune de referinta UR, furnizeaza la iesire un semnal digital X (reprezentarea numerica a tensiunii analogice de intrare Ux). La un convertor analog-numeric ideal, semnalul de iesire X este legat de Ux si UR printr-o relatie de genul:
X = Ux/UR (1)
in care semnalul de identitate care arata ca X este aproximarea continutului raportului Ux/UR in limitele rezolutiei lui X. Aceasta aproximare este ilustrata mai bine daca relatia de mai sus este rescrisa in forma implicita si daca se presupune ca X reprezinta un numar binar fractionar. Relatia va deveni:
Ux = UR*(a1*2-1 + a2*2-2 + . + an*2-n) (2)
Oricare convertor analog-numeric este supus unei erori de cuantizare, care este determinata de rezolutia semnalului digital sau, altfel spus, de cea mai mica crestere a tensiunii analogice de intrare pe care semnalul digital de iesire o poate aproxima. Matematic, aceasta eroare de cuantizare este definita astfel:
DUx = Ux/r (3)
unde r este baza sistemului de numeratie in care este scris numarul X (in majoritatea cazurilor r=2), iar n este numarul rangurilor lui X. Eroarea de cuantizare apare si in cazul unei marimi de intrare constante si in cazul in care tensiunea de intrare este o functie de timp.
Un alt tip de eroare, numita eroare de esantionare, apare numai pentru acest din urma tip de semnal de intrare. Eroarea de esantionare apare deoarece un convertor analog-numeric obisnuit utilizeaza semnalul de intrare pentru un timp foarte scurt si apoi il ignora pentru o perioada relativ lunga de timp. Atunci cand frecventa semnalului de intrare este mare, iar viteza de testare a intrarii este mica, eroarea de esantionare devine considerabila.
Caracteristica unui CAN este una de tip scara. In cazul ideal treptele sunt echidistante. Pentru cazul real apar abateri de la caracteristica ideala astfel incat treptele nu mai au aceeasi marime. O masura a acestei abateri o constituie monotonia convertorului analog-numeric.
Caracteristica unui CAN pe 3 biti de exemplu arata ca in figura de mai jos.
Din punct de vedere matematic se poate face distinctie intre arbitrar de mic, diferit de 0 si valoarea zero adevarata, dar din punct de vedere practic nu este posibil, existand tot timpul un interval pentru care orice aparat de masura, oricat de precis ar fi indica valoarea zero. Masurand suficient de precis nivelul semnalului la intrare pentru care se produce schimbarea codului de la iesire se constata ca acesta variaza de la o conversie la alta intr-o banda in jurul nivelului teoretic. Latimea benzii depinde de circuitele cu prag din convertor si de nivelul zgomotului suprapus peste semnalul de intrare. Se poate aprecia astfel ca, in regiunea de frontiera dintre canale probabilitatea de atribuire a canalului inferior scade spre zero pe masura ce nivelul semnalului creste, in timp ce probabilitatea de atribuire a canalului superior creste de la zero la valoarea din centrul canalului.
Fig. 4 .3
Exista mai multe criterii de clasificare a convertoarelor analog - numerice.
Dupa modul de tratare a semnalului de intrare: avem CAN de tip integrator care se folosesc indeosebi la frecvente joase pentru eliminarea zgomotelor suprapuse peste semnale si CAN de tip neintegrator la care se compara tensiunea furnizata la intrare cu una obtinuta de la un CNA. Se modifica codul de comanda a CNA pana cand se obtine cea mai buna aproximare a tensiuni de intrare, rezultatul fiind ultimul cod furnizat de CNA.
Functie de modul de cautare a acestui cod, covertoarele cu reactie se impart in:
a.)CAN ce folosesc metoda numaratorului;
b.)CAN cu urmarire;
c.)CAN cu aproximatii succesive.
a) CAN cu numarator pe reactie:
Functionarea circuitului este urmatoarea: numaratorul incepe sa numere; tensiunea de la iesirea CNA evolueaza crescator pana in momentul m care comparatorul schimba starea la iesire si se inhiba astfel functionarea numaratorului; simultan cu aceasta inhibare datele pot fi citite (numarul Ne) dupa care se va starta o noua conversie. Se observa ca timpul de conversie nu e constant pentru fiecare conversie in parte ci depinde de tensiunea de intrare astfel incat la tensiune de intrare maxima avem timpul de conversie maxim. In intervalul dintre doua citiri, tensiunea de intrare poate varia nefiind sesizata de convertor. Rezulta o pierdere de informatie ce poate fi micsorata prin cresterea frecventei citirilor adica cresterea frecventei de tact aplicata numaratorului. Totusi nu se poate creste frecventa oricat de mult din cauza limitarilor care apar in functionarea CNA si comparator.
b) CAN cu urmarire:
Daca se examineaza cu atentie formele de unda aferente functionarii CAN prezentat anterior se observa ca se pierde destul timp pana ce numaratorul reuseste sa ajunga la codul corespunzator marimii de intrare. O reducere sensibila a acestui timp se poate obtine prin utilizarea unei noi metode de conversie si anume conversia cu urmarire.
Schema de principiu ramane aceeasi ca in cazul precedent cu singura deosebire ca numaratorul folosit este reversibil. La primul start al conversiei tensiunea fumizata de CNA egaleaza sau e mai mare decat tensiunea de intrare, numaratorul nu este resetat, iar daca tensiunea scade se schimba sensul de numarare al numaratorului astfel incat tensiunea de la iesirea CNA, cu rol de referinta variabila, urmareste continuu tensiunea de intrare, ca in figura de mai jos.
Se observa ca in cazul in care tensiunea de intrare se mentine constanta tensiunea de la iesirea CNA are o variatie de un bit in jurul acestei valori. Pentru eliminarea si a acestei variatii se poate folosi o schema cu blocarea tactului, astfel incat daca tensiunea de la iesirea CNA este egala cu cea de intrare si se mentine constanta o perioada de timp dispare tactul si odata cu acesta si fluctuatiile din codul de iesire.
Un dezavantaj major al acestui tip de convertor este dat de viteza mica de urmarire a semnalului de intrare; se observa ca la un tact iesirea poate varia numai cu o unitate (treapta). Acest dezavantaj poate fi combatut si in acest caz prin marirea tactului aplicat numaratorului, dar totusi nu se recomanda folosirea CAN cu urmarire pentru semnale de intrare cu variatii rapide in timp.
B. Convertoare numeric-analogice
Un convertor numeric-analogic este un dispozitiv de decodificare care, primind la intrari un semnal digital binar D si un semnal de referinta analogic R, genereaza la iesire un semnal analogic A, legat de intrari prin relatia urmatoare:
Numarul D este intotdeauna subunitar si poate fi reprezentat astfel:
D = a1*2-1 + a2*2-2 + . + an*2-n (2)
Deci, iesirea convertorului numeric-analogic va fi:
A = R*(a1*2-1 + a2*2-2 + . + an*2-n) (3)
Ultima relatie defineste de fapt functia de transfer a oricarui tip de convertor digital-analogic.
Forma expresiei digitale D determina configuratia convertorului. Astfel, functie de structura si forma semnalului numeric de intrare D, deosebim convertoare numeric-analogice paralel sau serie, fiecare dintre acestea putand fi unipolare sau bipolare.
Convertorul numeric-analog folosit este circuitul integrat DAC 08 de productie romaneasca.
DAC 08 - descriere generala
DAC 08 este un circuit integrat monolitic avand
functia de convertor digital-analog, caracterizat de o valoare tipica a
timpului de stabilire de 100ns. In aplicatii de multiplicator analogic,
respecta conditiile de monotonie pentru un domeniu de variatie 40 la 1 a
curentului de referinta. Acest convertor are iesiri complementare de curent cu
o excursie larga de tensiune, permitand existenta unor tensiuni diferentiale la
iesire de 20V varf la varf pe sarcini rezistive. Diferenta foarte mica intre
valoarea curentului de referinta si valoarea curentului de iesire la capat de
scala, mai putin de ![]() LSB
(cel mai putin semnificativ bit) elimina ajustarile pentru capat de scala in
cele mai multe cazuri. De asemenea, neliniaritatile foarte mici, sub 0,1% pe
domeniul de temperatura minimizeaza eroarea totala din diferite surse.
LSB
(cel mai putin semnificativ bit) elimina ajustarile pentru capat de scala in
cele mai multe cazuri. De asemenea, neliniaritatile foarte mici, sub 0,1% pe
domeniul de temperatura minimizeaza eroarea totala din diferite surse.
Cele 8 intrari de comanda logica ale circuitului accepta nivele TTL cand terminalul 1,corespunzator potentialului de prag logic VLC este conectat la masa. Simpla modificare a potentialului VLC permite interfatarea directa a celor 8 intrari logice cu toate familiile logice.
Caracteristicile de functionare ale circuitului sunt, in esenta,
neschimbate in domeniul ![]() 4,5.
4,5.![]() 18V
al tensiunilor de alimentare. Puterea disipata de circuit este de numai 33mW
pentru o alimentare de
18V
al tensiunilor de alimentare. Puterea disipata de circuit este de numai 33mW
pentru o alimentare de ![]() 5V
si este independenta de starile logice pe intrari. In functie de limitele
admise pentru anumiti parametri, acest circuit se poate incadra in urmatoarele
variante:DAC08M si DAC08AM pentru domeniul de temperatura -550C.+1250C
si DAC08E,DAC08C,DAC08H,pentru domeniul de temperatura 00C.+700C.
5V
si este independenta de starile logice pe intrari. In functie de limitele
admise pentru anumiti parametri, acest circuit se poate incadra in urmatoarele
variante:DAC08M si DAC08AM pentru domeniul de temperatura -550C.+1250C
si DAC08E,DAC08C,DAC08H,pentru domeniul de temperatura 00C.+700C.
Schema bloc a convertorului bDAC 08 este indicata in figura de mai jos:
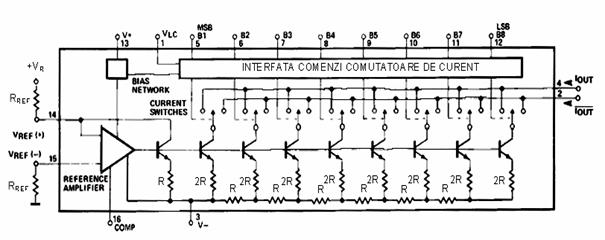
Fig. 4.6
Circuitul are doua iesiri de curent notate I0
si ![]() .
Acesti curenti au proprietatea ca suma lor este constanta si egala cu
.
Acesti curenti au proprietatea ca suma lor este constanta si egala cu ![]() IREF,
unde IREF este curentul impus din exterior care intra in terminalul 14; ei sunt furnizati de blocul
comutatoare curenti, obtinandu-se prin insumarea curentilor din iesirile
fiecaruia din cele 8 comutatoare.
IREF,
unde IREF este curentul impus din exterior care intra in terminalul 14; ei sunt furnizati de blocul
comutatoare curenti, obtinandu-se prin insumarea curentilor din iesirile
fiecaruia din cele 8 comutatoare.
Curentii furnizati de blocul de retea ponderare curenti sunt o fractiune crescatoare cu puterile lui 2, din curentul IREF; astfel Ik=IREF/2k pentru k=1.8. Acesti curenti sunt aplicati la intrarile celor opt comutatoare de curent.
Comutarea oricaruia din curenti spre iesirea I0
sau ![]() se face in functie de comanda logica aferenta
comutatorului respectiv. Comenzile pentru cele opt comutatoare de curent sunt
date de blocul interfata comenzi comutatoare de curent, ce are rolul de
separare intre cei opt biti de comanda logica B1,..., B8
si blocul comutatoare de curent.
se face in functie de comanda logica aferenta
comutatorului respectiv. Comenzile pentru cele opt comutatoare de curent sunt
date de blocul interfata comenzi comutatoare de curent, ce are rolul de
separare intre cei opt biti de comanda logica B1,..., B8
si blocul comutatoare de curent.
Astfel in functie de configuratia logica a intrarilor B1,.,B8 se obtine un curent I0 proportional cu valoarea numerica a cuvantului binar format din cei opt biti. Valoarea maxima la iesirea de curent I0 se obtine atunci cand toti curentii Ik sunt comutati la aceasta iesire.
Se obtine:
I0=![]() =IREF
=IREF (1)
(1)
Curentul de referinta, IREF, ce reprezinta marimea analogica din intrarea convertorului, este transferata catre blocul de retea ponderare curenti prin blocul amplificator de referinta care este un repetor de curent realizat cu un amplificator operational functionand intr-o bucla de reactie negativa de curent.
Curentul de referinta, Iref este furnizat din exterior cu ajutorul unui generator de curent sau dintr-un generator de tensiune, VREF, si o rezistenta, RREF, care detemina valoarea curentului:
IREF=![]() (2)
(2)
Configuratia terminalelor
tensiune control prag logic (VLC);
curent
in iesire complementara (![]() );
);
tensiune alimentare negativa(V-);
curent in iesire directa (IOUT);
intrare logica pentru bitul cel mai semnificativ (MSB B1);
intrare logica (B2);
intrare logica (B3);
intrare logica (B4);
intrare logica (B5);
intrare logica (B6);
intrare logica(B7);
intrare logica pentru bitul cel mai putin semnificativ(LSB B8);
tensiune alimentare pozitiva (V+);
intrarea neinversoare a amplificatorului referintei convertorului (VREF(+));
intrarea inversoare a amplificatorului referintei convertorului (VREF(-);
terminal pentru compensarea in frecventa (COMPENSATION).
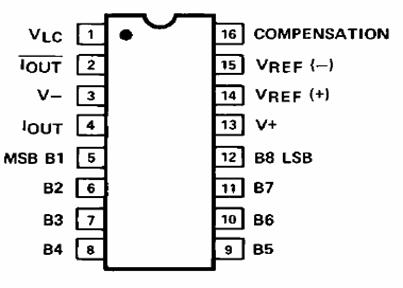
Fig. 4.7
Caracteristicile notabile ale circuitului:
- timpul de stabilire pentru curentul de iesire: 100nS
- eroarea la capat de scala: ![]() 1LSB
1LSB
- neliniaritatea in temperatura: ![]() 0,1%
0,1%
- excursia larga a tensiunii la iesire: -10V.+18V
- iesiri complementare de curent
- interfatare directa cu TTL, CMOS si celelalte familii
- posibilitatea de inmultire in doua cadrane pe domeniu larg
- admite tensiuni de alimentare in limite largi:![]() 4,5V.
4,5V.![]() 18V
18V
- consum redus de putere 33mW la ![]() 5V
5V
- pret scazut
Blocul logic de control format din patru comparatoare integrate in circuitul specializat bM 339 si un multiplexor/demultiplexor analogic cu 16 canale MMC 4067, din care se folosesc numai patru canale si un comutator manual cu trei pozitii pentru simularea a trei canale diferite folosind aceeasi doza tensometrica.
MMC 4067 - descriere generala
Circuitul integrat MMC 4067 este un multiplexor/demultiplexor analogic si contine comutatoare analogice controlate digital, care prezinta o rezistenta in starea ON de valoare coborata, curent rezidual in starea OFF mic si decodare interna a adresei. In plus, rezistenta in starea ON a comutatoarelor este relativ constanta pe toata plaja valorilor semnalului de intrare.
Circuitul MMC 4067 este un multiplexor cu 16 canale si are 4 intrari de control A, B, C, D si o intrare de inhibare (INHIBIT), aranjate astfel incat o combinatie a intrarilor sa selecteze un canal.
Un nivel logic 1 pe intrarea INHIBIT blocheaza toate canalele.
Performante
rezistenta in starea ON: 125W pentru o plaja de valori ale semnalului de intrare de pana la 15 V varf-la-varf si VDD-VSS=15V;
imperechere de rezistenta ON intre comutatoare: 5W pentru VDD-VSS=15V;
decodarea adreselor binare pe circuit;
rezistenta
in starea OFF mare: curent rezidual ![]() 10
pA pentru VDD-VSS=10V;
10
pA pentru VDD-VSS=10V;
|
A |
B |
C |
D |
INH |
Canal selectat |
|
X |
X |
X |
X |
Nici unul |
|
Fig. 4.8
bM 339 - descriere generala
Circuitul integrat bM-339 contine patru comparatoare independente si un etaj comun de alimentare. Iesirea este clasa A, tranzistor cu colector in gol. Timpul de raspuns la semnal mare, de 0,3 ms, satisface cerintele de compatibilitate cu circuite TTL pentru aplicatii industriale.
Domeniul de aplicatii cuprinde comparatoare de limita, convertoare analog simple, generatoare de impulsuri, circuite de intarziere, multivibratoare, oscilatoare controlate in tensiune, interfata cu circuite MOS, etc
Caracteristici notabile
- tensiuni de alimentare: sursa simpla: 2.30 V
sursa dubla: ![]() 1.
1.![]() 18
V
18
V
curent de alimentare: 0,8mA,
- tensiune de saturatie: 250mV la 4mA
iesire compatibila cu TTL, DTL, ECL, MOS si CMOS
tensiune de ofset si curenti de intrare redusi
Configuratia terminalelor este prezentata in
continuare:
Fig. 4.9
4.3 PROIECTAREA BLOCULUI DE ALIMENTARE
Acesta este format din transformator coborator de
tensiune 220/2![]() 9
V, punte redresoare, condesatori de filtrare, circuit integrat specializat
pentru furnizarea tensiunii de
9
V, punte redresoare, condesatori de filtrare, circuit integrat specializat
pentru furnizarea tensiunii de ![]() 5
V, un amplificator operational in montaj inversor avand ca regulator la iesire
un tranzistor pnp pentru furnizarea tensiunii de -5 V si un alt amplificator
operational in montaj neinversor, care genereaza o tensiune de referinta de +2
V pentru alimentarea rezistentei de sarcina a convertorului digital - analogic
DAC 08, astfel asigurand functionarea sistemului in logica pozitiva.
5
V, un amplificator operational in montaj inversor avand ca regulator la iesire
un tranzistor pnp pentru furnizarea tensiunii de -5 V si un alt amplificator
operational in montaj neinversor, care genereaza o tensiune de referinta de +2
V pentru alimentarea rezistentei de sarcina a convertorului digital - analogic
DAC 08, astfel asigurand functionarea sistemului in logica pozitiva.
Toate circuitele descrise in paragraful anterior se
alimenteaza de la acelasi bloc de alimentare, care constituie de fapt o sursa
de tensiune continua diferentiala si stabilizata de ![]() 5
V.
5
V.
Pentru a obtine o stabilizare si redresare de precizie, in schema blocului de alimentare am utilizat circuitul integrat stabilizator LM7805.
Acesta este un circuit specializat in stabilizare care nu necesita componente externe, avand semnificatia terminalelor si caracteristicile de mai jos:
- tensiune de intrare: min 5V.max.15V
tensiune
de iesire: 5 V![]() 5%;
5%;
 putere maxima disipata: 15 W;
putere maxima disipata: 15 W;
curent de limitare la scurtcircuit: 1A;
curent de scurcircuit de durata mica: max 3A;
factor de stabilizare: min. 1%;
temperatura de lucru: 0.150oC.
Configuratia terminalelor:
1= tensiune de intrare;
2= tensiune de iesire; Fig. 4.10
3= masa.
Datele de proiectare la calculul transformatorului de retea pentru un alimentator sunt:
tensiunea in infasurarea secundara: E2=18 V;
tensiunea efectiva din primar: E1=220 V;
cresterea procentuala posibila a tensiunii retelei:
 (1)
(1)
curentul efectiv maxim in infasurarea secundara: I2=1A;
Puterea aparenta maxima din infasurarea secundara:
 (2)
(2)
Raportul de transformare va fi:
 (3)
(3)
Curentul efectiv din primar:
![]() (4)
(4)
Adoptand o inductie magnetica de B=1 T, rezulta curentul total din primar:
![]() (5)
(5)
Puterea aparenta maxima din primarul transformatorului este:
 (6)
(6)
Puterea medie (de calcul) a transformatorului este:
![]() (7)
(7)
Sectiunea miezului pentru o putere medie relativ redusa este:
![]() cm2 (8)
cm2 (8)
Dimensiunea a a tolelor va fi:
![]() (9)
(9)
si rezulta latimea pachetului de tole:
![]() (10)
(10)
Numarul de spire pe volt pentru inductia B=1 T este:
![]() (11)
(11)
Numarul de spire din primar si secundar:
![]() (12)
(12)
![]() (13)
(13)
Diametrul conductoarelor de bobinaj (J=2,7A/mm2):
 (14)
(14)
 (15)
(15)
PROIECTAREA CIRCUITULUI DE MASURARE A TEMPERATURII
Dupa cum am vazut in capitolul trei rezistentele puntii tensometrice variaza cu temperatura, perturband astfel semnalul masurat.
O solutie privind compensarea temperaturii este chiar masurarea temperaturii si aplicand o corectie asupra rezultatului masurarii, functie de valoarea ei.
Se cunoaste ca o jonctiune p-n polarizata direct, este caracterizata de o ecuatie de functionare de forma:
ID![]() I0.exp
I0.exp![]() (1)
(1)
unde ID- curentul direct,I0-curentul de saturatie, q-sarcina electronului, k-constanta lui Boltzman, UD-tensiunea de polarizare directa iar T-temperatura de lucru.
Mentinand
curentul constant si modificand temperatura, tensiunea de polarizare directa a
unei jonctiuni de siliciu variaza cu cca. -2mV/oC pentru o gama
larga de temperaturi (-55 oC![]() 150
oC).Pe aceasta cale se poate obtine un senzor de temperatura ca in
figura, pentru care putem scrie:
150
oC).Pe aceasta cale se poate obtine un senzor de temperatura ca in
figura, pentru care putem scrie:
UD=![]() .ln
.ln![]() (2)
(2)
relatie ce pune in evidenta o caracteristica liniara UD(T).
![]()
![]()
![]()
 ID
ID
![]()
![]()
![]() T1>T2 Iex=ID
T1>T2 Iex=ID
![]()
![]()
![]()
![]()
![]()
![]()
![]() U1(T1) U2(T2)
U1(T1) U2(T2)
Fig. 4.11
Amplificator operational in montaj inversor, care amplifica tensiunea generata de jonctiunea baza - emitor a unui tranzistor npn, cu rol de traductor de temperatura, in vederea compensarii derivei termice a dozei tensometrice.
Variatia tensiunii la bornele jonctiunii baza - emitor este data de relatia 2 unde:
k =
constanta lui Boltzman (![]() -23
J K;
-23
J K;
T= temperatura absoluta [K]
q=
sarcina electronului (![]() -19C);
-19C);
IC= curentul din circuitul colector;
4.5 SCHEMA DE MASURARE
Datorita capabilitatii convertorului DAC 08 de a
functiona la tensiuni reduse de alimentare (![]() 5V)
si interfatare cu orice tip de logica (pozitiva sau negativa), acesta este
foarte potrivit in sistemele cu calculator.
5V)
si interfatare cu orice tip de logica (pozitiva sau negativa), acesta este
foarte potrivit in sistemele cu calculator.
Acest sistem realizeaza conversia analog - digitala a trei semnale analogice cu valori intre 0 si +2V, in informatie binara de 8 biti, ce reprezinta rezultatul conversiei.
Controlul conversiei analog -7 digitala este facut de un calculator prin intermediul unei interfete, folosind algoritmul de urmarire (un alt algoritm ce ar putea fi folosit ar fi cel de aproximare succesiva). Pentru conversia analog - digitala, toata logica de conversie este furnizata de calculator. Aceasta este o cale economica ca pret si realizare fizica, deoarece nu mai sunt necesare obisnuitele circuite logice, componente ale sistemului de conversie analog - digitala fara calculator.
La punerea sub tensiune a interfetei, semnalul generat de doza tensometrica este amplificat cu ajutorul amplificatorului operational bM 108, apoi prin intermediul comutatorului manual K selectam unul din cele trei canale care simuleaza trei surse de semnal diferite.
Din comutator semnalul ajunge la intrarea inversoare a unui comparator din capsula bM 339 iar intrarea neinversoare este conectata la unul din canalele multiplexorului de tipul MMC 4067, care este selectat de calculator prin magistrala de control. Aceasta magistrala mai contine o linie activa in starea LOW, prin care este informat calculatorul, de unul din cele patru comparatoare ca valoarea analogica de la una din intrarile inversoare este atinsa de valoarea semnalului obtinut la iesirea convertorului digital - analogic DAC 08, moment in care se opreste conversia. Valoarea numerica corespunzatoare semnalului analogic din momentul opriri conversiei, este memorat intr-un fisier apoi prelucrat in timp real in vederea afisarii instantanee a valorii masei pe ecranul monitorului si totodata printarea unui pixel de o anumita culoare pe ecran pentru obtinerea unui grafic.
Interfata mai contine o magistrala de date formata din opt linii prin intermediul careia convertorul digital - analogic este comandat sa genereze la iesire un semnal in tensiune
E0=RLI0 (1)
unde:
RL= rezistenta de sarcina de 1KW
Deci tensiunea E0 ia valori cuprinse intre 0 si pana la RLIFS.
 (2)
(2)
IFS= curentul la capatul de scala
 (3)
(3)
Cap.5
NTERFATAREA SI PROGRMAREA SCHEMEI DE MASURARE
ARHITECTURA GENERALA A CALCULATOARELOR COMPATIBILE IBM PC
Sistemele de tip IBM PC au o structura modulara interconectata prin magistrala de sistem, fiind alcatuite din mai multe module care vor fi descrise in continuare. Toate calculatoarele care ofera compatibilitate hardware cu IBM PC trebuie sa respecte functiile modulelor respective.
UNITATEA CENTRALA
Unitatea centrala contine urmatoarele componente ale sistemului:
- microprocesorul I8088 (80x86, x=1,2,3,4) si circuitele aferente;
- coprocesorul matematic;
- sistemul de intrerupere cu 8 nivele de prioritate;
- sistemul de acces direct la memorie;
- generatorul de timp programabil;
- interfata pentru tastatura;
- generatorul sonor programabil.
Inima unitatii centrale o constituie microprocesorul. Pentru adresarea memoriei si a perifericelor acesta utilizeaza o magistrala de adrese de 20 de linii, ceea ce permite utilizarea unui spatiu de memorie de 1 Megaocteti (pana la 64 MB la sistemele mai noi) si un spatiu de intrare/iesire de 64 Kocteti.
Procesorul este conectat in modul maxim de functionare, ceea ce permite utilizarea unui coprocesor matematic. Prin utilizarea coprocesorului creste simtitor puterea de calcul a sistemului. Acesta poate efectua operatii matematice cu operanzi intregi si flotanti, utilizand pentru aceasta registri de 80 de biti. Echiparea cu coprocesor matematic este optionala.
Sistemul are o frecventa de ceas, pe care o utilizeaza si pentru generarea semnalelor video necesare monitorului de vizualizare. La frecventa de 4,77 Mhz, in general ciclul masina al procesorului este de 840ns pentru operatii cu memoria si de 1050ns pentru operatiile de intrare/iesire (la aceasta se introduce si o stare de asteptare).
Pe placa de unitate centrala exista un sistem de acces direct la memorie (DMA), realizat cu un controlor specializat de tip I8237. Aceasta ofera patru canale programabile care au acces la intregul spatiu de memorie al procesorului. Trei dintre canale pot fi utilizate pentru transferuri rapide intre periferice si memoria sistemului. Al patrulea canal este utilizat pentru reimprospatarea informatiei din memoria dinamica a sistemului. Pe acest canal se genereaza periodic cicluri de citire, care sunt interpretate de memorie ca si cicluri de reimprospatare. Cererile de "transfer " sunt generate de un generator de timp programabil. Reimprospatarea dureaza 840ns si se executa la fiecare 15 microsecunde.
Sistemul de intreruperi este realizat cu un contor de tip I8259. Exista opt nivele de intrerupere din care sase sunt disponibile pe magistrala sistem, iar doua sunt utilizate pe placa de unitate centrala. Cererile de intrerupere din sistem sunt cumulate si deservite in ordinea prioritatilor de catre controlerul I8269 care are posibilitatea de a intrerupe procesorul central pe linia de intrerupere mascabila INT. procesorul poseda inca o linie de intrerupere mascabila care este actionata de catre coprocesor (daca exista) sau de o eroare de paritate aparuta la memoria sistemului.
INTRERUPERILE LA CALCULATOARELE DE TIP IBM PC
Familia de calculatoare de tipul IBM PC manevreaza sapte tipuri de intreruperi: ale microprocesoarelor, hardware, software, DOS, BASIC, de adresa, si de uz general.
Intreruperile microprocesoarelor sunt intreruperi de tipurile 0,1,3 si 4 care sunt generate de microprocesor si intreruperea de tipul 2 (NMI) care este generata de un semnal de la dispozitivele periferice.
Intreruperile hardware sunt fixate la constructia calculatorului. Dintre acestea, opt sunt cablate pe placa principala a sistemului si nu pot fi schimbate. Intreruperile hardware sunt supervizate de controlerul de intreruperi 8259A.Tipurile rezervate pentru acestea sunt 2,8,9 si de la 11 pana la 15.
Intreruperile software sunt fixate la toate sistemele compatibile IBM PC si fac parte din programele BIOS-ului. Rutinele BIOS-ului sunt invocate de aceste intreruperi care nu pot fi schimbate. Tipurile rezervate pentru acestea sunt: 5, de la 16 la 28 si 72.
Intreruperile DOS sunt disponibile numai sub sistemul de operare DOS. Rutinele de tratare a acestor intreruperi gestioneaza operatiile de baza, lucrul cu fisiere, gestionarea memoriei, etc. tipurile lor rezervate sunt de la 32 la 255 (sunt folosite doar de la 32 la96).
Intreruperile BASIC sunt folosite numai daca interpretorul BASIC din memoria ROM este activ. Tipurile rezervate sunt de la 128 la 240.
Vectorii intreruperilor de adresa se gasesc in tabela vectorilor de intrerupere si contin adresele diferitelor tabele din memorie. Trei dintre ele sunt asociate cu trei tabele importante: tabela de initializare video, tabela de baza a discului si tabele de caractere grafice. Codurile rezervate sunt de la 29 pana la 31.
Intreruperile de uz general sunt folosite de programele utilizator.
Adaptoarele de intrare/iesire sunt utilizate pentru a asigura realizarea functiilor ce trebuie executate de dispozitivele de I/E. unitatea sistem este prevazuta cu un difuzor cu o putere de aproximativ 0,5W.
Canalul de intrare/iesire este o extensie a magistralei microprocesorului I8088. Acesta contine magistrala bidirectionala de date de 8 biti, 20 linii de adresa, 6 nivele de intreruperi, linii de control pentru reimprospatarea memoriei, o linie de verificare canal si tensiunile de alimentare: +5V, -5V, +12V, -12V.
Dispozitivele de intrare/iesire sunt adresate folosind un spatiu de intrare/ iesire, care permite canalului sa adreseze 768 dispozitive de intrare/iesire.
Codul emis de tastatura este un cod special (scan code) in locul codului ASCII obisnuit. De asemenea, tastele sunt "typematic" si genereaza un cod si la lasare si la apasare. Codul emis la eliberarea tastei este format prin adaugarea valorii 80h la codul de apasare. Astfel tasta 1 produce codul 1h la apasare si codul 81h la lasare.
INTERFATA PENTRU MONITOR COLOR GRAFIC (CGA)
Adaptorul are doua moduri de functionare de baza: alfanumeric si grafic (adresabil punct cu punct).
In modul alfanumeric exista doua tipuri de afisare a informatiei: 80 coloane, 25 randuri si 40 coloane, 25 de randuri. Cel din urma se recomanda in cazul folosirii unui monitor cu o rezolutie slaba sau a unui receptor de televiziune uzual. In ambele formate caracterele se definesc pe un camp de 8x8 puncte. Setul de caractere contine toate caracterele majuscule si minuscule in ambele regimuri.
In varianta color, exista pentru fiecare caracter 16 culori pentru afisarea informatiei si 8 pentru culoarea de fond, de asemenea este posibila afisarea caracterelor in regim de palpaire. Totodata, in regim color si alfanumeric se poate alege o culoare din 16 pentru bordura ecranului.
Adaptorul are o memorie proprie de 16 Kocteti. In consecinta in modul 40x25 caractere, 1 Koctet se foloseste pentru stocarea caracterelor si tot 1 Koctet pentru memorarea informatiilor de culoare sau atribute. Prin urmare, in acest caz in memoria adaptorului se poate stoca informatia a 8 ecrane.
Intreaga capacitate de 16 Kocteti a memoriei poate fi adresata direct de procesor, lucru ce asigura flexibilitatea maxima la tratarea ecranelor din punct de vedere software.
In modul grafic exista doua rezolutii: rezolutie color medie 320 puncte x 200 randuri si rezolutie color mare: 640 puncte x 200 randuri.
Adaptorul lucreaza neintretesut la frecventa de 14MHz sau mai mult in functie de rezolutie.
ADAPTORUL EGA: Aceasta oferea o rezolutie mai buna decat placa CGA, mostenind in acelasi timp toate modurile de utilizare ale placilor MDA si CGA. De asemenea ea oferea posibilitati grafice si ecranelor monocrom.
Utilizand ecrane color, placa oferea texte in 16 culori si grafica cu o rezolutie de 640*350 de puncte (paleta de culori se extinde pana la 64, iar 16 culori puteau fi utilizate simultan). Un alt avantaj il constituia calitatea imaginii.
Pentru comunicatii seriale se poate atasa sistemului o interfata de comunicatii seriale sincrone de tip SDLC. Aceasta nu este prevazuta in configuratia standard a calculatorului, montarea ei facandu-se in modul de extensii. rata maxima de transfer este de 9600 biti/sec. Interfata este realizata cu un circuit I8273 pentru controlul protocolului SDLC, o interfata paralela programabila I8255 si un timer programabil I8253.
Interfata pentru imprimanta a fost proiectata pentru a atasa imprimante folosind liniile paralele, dar poate fi folosita si ca o interfata paralela de uz general.
Unitatea sistem este prevazuta si cu conectoare disponibile pentru a introduce placi suplimentare in sistem. Daca se ocupa toate aceste conectoare, se poate utiliza o unitate de extensie externa pentru a cupla alte placi la sistem.
Portul paralel este cel mai utilizat port pentru interfatarea imprimantelor si a dispozitivelor realizate manual.
Interfata paralela standard (Centronics) implementata in microcalculatoarele IBM PC a fost conceputa pentru transmiterea datelor catre o imprimanta conform protocolului Centronics. Aceasta interfata nu este in principiu prevazuta decat pentru emisia de date. Portul paralel consta in 8 linii de date, 4 linii de comanda , 5 linii de stare si este accesibil din exterior prin intermediul unui conector RK25.
Liniile de semnal sunt gestionate prin intermediul a 3 registre corespunzatoare: registrul de date, registrul de comenzi si registrul de stare asa cum este prezentat in schema bloc din figura.
In general, registrul de date este prevazut sa functioneze numai in mod iesire dar la unele variante de implementare el poate fi trecut in inalta impedanta, portul de date devenind bidirectional. Registrul de comanda are iesirile de tip open colector (sau open drain pentru circuitele in tehnologie MOS) si poate fi utilizat ca un port bidirectional.
Intr-un calculator IBM - PC pot fi implementate pana la 3 porturi paralele (LPT1, LPT2 si LPT3 - LPT = Line PrinTer).
Fig. 4.12
In continuare se gaseste un tabel cu asignarile pinilor de la conectorul RK25, folosit in mod curent pentru portul paralel al calculatoarelor.
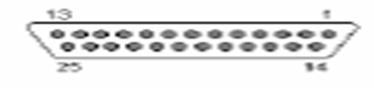
Fig. 4.13
/STROBE → Strobe
→ Data bits
/ACK ← Acknowledge
BUSY ← Busy
12 PE ← Paper End
13 SEL → Select
14 /AUTOFD → Autofeed
15 /ERROR ← Error
16 /INIT → Initialize
17 /SELIN ← Select In
GND --- Signal Ground
In tabel s-a folosit simbolul "/" in fata numelui semnalului pentru a arata faptul ca semnalul este activ pe nivelul zero logic.
Dupa cum am vazut portul paralel cu care este dotat orice calculator numeric este proiectat pentru realizarea interfetei intre calculator si o imprimanta paralela. Totusi, in unele aplicatii, acest port poate fi utilizat cu succes pentru comanda convertoarelor numeric-analogice de rezolutie mica.
In cazul de fata iesirea convertorului digital-analogic DAC 08 se va cupla la portul paralel la intrarile de date D0.D7(pinii 2.9).
Cele doua canale de selectie ale multiplexorului MMC 4067 se leaga la pinii 14 si 16.
Iesirea blocului de comparatoare, unde au loc comparatii ale tensiunii furnizate de PC prin portul paralel cu tensiunile furnizate din proces (de la traductoare), se leaga la pinul 13 al portului paralel.
C-ul este limbajul ce s-a impus in ultimii ani pentru realizarea programelor de aplicatii. Avantajele acestui limbaj sunt:
portabilitate mare a programelor;
include facilitatile unui limbaj de asamblare: lucru pe biti, calcule de adrese, intreruperi, facilitati ce ofera multiple avantaje in implementarea unor aplicatii industriale;
permite realizarea unor programe compacte.
La inceput, limbajul C nu includea facilitati ale programarii pe obiecte.
Cand s-au dezvoltat tehnicile de programare pe obiect, limbajul a fost extins astfel incat sa poata fi utilizat si cu noile concepte de programare.
Aplicatiile industriale, in general, nu necesita programe sofisticate, functiile ce trebuiesc rezolvate, sunt de obicei la nivelul unor operatii logice ce nu utilizeaza conceptele programarii pe obiect.
Astfel, folosind puterea de calcul a calculatoarelor, se pot realiza prin soft functii ce necesita module hard complicate.
#include <dos.h>
#include <stdio.h>
#include <conio.h>
#include <graphics.h>
#include <stdlib.h>
#define PORTADDRESS 0x378 // la unele calculatoare poate sa fie 278 sau 3BC
#define DATA PORTADDRESS+0
#define STATUS PORTADDRESS+1
#define CONTROL PORTADDRESS+2
unsigned char val1, val2, val3, val4;
unsigned int counter560, val1_old = 0, val2_old = 0, val3_old = 0, val4_old = 0;
void initializare_sistem( void );
void startgraph( void );
void make_desktop( void );
void citesc_canal(unsigned char canal);
void Afisarea(void);
#define REZY 200
unsigned long int REZX;
typedef struct RECT
RECT;
RECT r = ; // dimensiunile ferestrei principale
void startgraph( void )
void initializare_sistem()
void make_desktop( void )
for( i = 5; i >= 0; i--)
}
setlinestyle(SOLID_LINE,0,1);
/*********** MAIN MAIN MAIN MAIN MAIN MAIN MAIN MAIN *************/
void main(void)
while (c !=27);
/******** FINISH BUCLA PRINCIPALA *********/
astept_tasta:
if (kbhit()) c = getch();
else goto astept_tasta;
//closegraph(); // face intuneric
} // END main()
void citesc_canal(unsigned char canal)
gasita_old = 1; valoarea = 0;
while(1)
gasit_prima:
if(canal == 1) val1 = valoarea;
if(canal == 2) val2 = valoarea;
if(canal == 3) val3 = valoarea;
if(canal == 4) val4 = valoarea;
void Afisarea()
char buff0[200];
printf('nn Apasa ESC ca sa iesi oricindn');
putpixel(r.left+counter560, r.bottom - val1, BROWN);
putpixel(r.left+counter560, r.bottom - val2, BLUE);
putpixel(r.left+counter560, r.bottom - val3, GREEN);
putpixel(r.left+counter560, r.bottom - val4, LIGHTRED);
setcolor(BROWN);
if(val1_old != val1 && counter560 !=0)
line(r.left+counter560-1, r.bottom - val1_old, r.left+counter560, r.bottom - val1);
setcolor(BLUE);
if(val2_old != val2 && counter560 !=0)
line(40+counter560-1,r.bottom - val2_old,r.left+counter560, r.bottom - val2);
setcolor(GREEN);
if(val3_old != val3 && counter560 !=0)
line(r.left+counter560-1, r.bottom - val3_old, r.left+counter560, r.bottom - val3);
setcolor(LIGHTRED);
if(val4_old != val4 && counter560 !=0)
line(r.left+counter560-1, r.bottom - val4_old, r.left+counter560, r.bottom - val4);
val1_old = val1;
val2_old = val2;
val3_old = val3;
val4_old = val4;
setcolor(WHITE);
gotoxy(1,1); //printf(buff0);
gotoxy(200,2); printf(' Cantar 1 = %i Kg ',val1);
gotoxy(200,3); printf(' Cantar 2 = %i Kg ',val2);
gotoxy(200,4); printf(' Cantar 3 = %i Kg ',val3);
gotoxy(200,4); printf(' Cantar total = %i Kg ',val4);
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 4494
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved