| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Campul magnetic in intrefierul masinilor de curent continuu
Campul magnetic inductor la masinile de curent continuu este creat de infasurarile plasate in jurul polilor principali si se mai numeste si camp de excitatie. Infasurarile diversilor poli sunt astfel conectate intre ele incat realizeaza pe periferia armaturii o succesiune de poli cu polaritati care alterneza. Numarul polilor magnetici pe intrega masina este notat cu 2p, dintre acestia p sunt de o polaritate (N), intercalati de alti p poli de polaritate inversa (S). Pe ansamblu, masina are p perechi de poli.
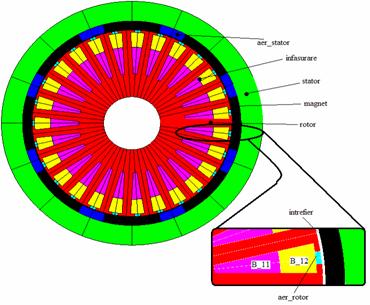
Fig.2.1.1
Infasurarea de excitatie este alimentata in curent continuu, de la o sursa separata, sau chiar de la periile masinii (de la bornele indusului), fiind conectate in derivatie sau in serie cu circuitul indusului. Un caz tot mai frecvent intalnit in ultimul timp este cel al masinii excitate cu magneti permanenti.
In figeste prezentata detaliat o portiune dintr-o masina cu 4 poli (tetrapolara) care se rezuma la o pereche de poli. Infasurarea de excitatie are We spire pe fiecare pol si este parcursa de curentul Ie. Solenatia realizata de fiecare pol este Θe=WeIe. Pentru o analiza aproximativa se vor ignora atat crestaturile rotorice cat si cele statorice (daca exista, in acestea se introduce infasurarea de compensatie).
Pe traseul inchis T se aplica legea circuitului magnetic (suma caderilor de tensiune magnetica este egala cu solenatia care inlantuie traseul inchis considerat):
![]() (1)
(1)
Se fac precizarile: - traseul T s-a considerat avand 2 portiuni prin fier, una prin jugul rotorului, alta prin jugul (inclusiv polii cu talpile polare) statorului, la care se mai adauga 2 portiuni prin aer (intrefier), de lungimi δ - dependente de unghiul α luat fata de o axa de referinta orizontala; - intensitatea campului magnetic prin portiunea feromagnetica este neglijabila (se considera fierul de permeabilitate infinita) incat primul termen din membrul stang al ultimei egalitati din relatia (1) se poate ignora. Din ecuatia (1) se obtine expresia intensitatii campului magnetic si a inductiei in intrefier:
![]() (2)
(2)
Marimea intrefierului variaza, anume: δ(α) are o valoare minima δmin in centrul polului, apoi valoarea sa creste spre marginile talpii polare si ajunge la o valoare maxima δmax pe directia dintre doi poli. Directia pe care intrefierul este minim este axa longitudinala a masinii (d), iar cea care trece printre doi poli alaturati este numita axa transversala (q).
Pe baza expresiei (2) se poate trasa dependenta inductiei in intrefier, de unghiul α, care se vede pe fig. 2.1.2. Este de remarcat faptul ca inductia in intrefier, creata de sistemul inductor, are o valoare maxima pe directia axului polului, d, valoarea sa scazand spre marginile talpii polare, variatia avand forma cvasitrapezoidala, cu schimbare a sensului liniilor de camp pe directia axei transversale, q, numita si axa neutra din punct de vedere magnetic. Situatia se repeta pe periferia masinii, incat inductia trece prin maxime pozitive in dreptul a p poli magnetici de un nume si trece prin maxime negative in dreptul celorlalti p poli magnetici de alt nume.
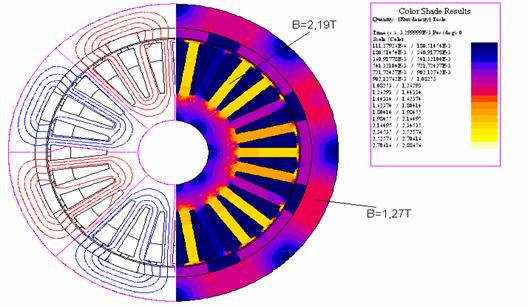
Fig.2.1.3
Pe fig. 2 s-a considerat o sectionare a masinii cu un semiplan limitat de dreapta ce contine axa de rotatie a rotorului si o raza coliniara cu axa de referinta pozitiva (caracterizata de α=0), dupa care se efectueaza o asezare (intindere) in plan, astfel incat statorul se situeaza in partea inferioara (sub axa absciselor) iar rotorul este plasat deasupra axei absciselor. In modul acesta unghiurile pozitive luate pe o circumferinta imaginara dusa prin mijlocul intrefierului (la distante aproximativ egale de cele doua armaturi concentrice) se vor regasi la o anumita scara, pe directia pozitiva a axei absciselor. Daca liniile de camp au sensul de la armatura statorica (exterioara) catre armatura rotorica (interioara), atunci inductia se reprezinta prin valori pozitive.
Fie o spira plasata pe rotor, in rotatie, tensiunea indusa luata pe conturul spirei este maxima daca de exemplu, atunci cand o latura a sa trece prin dreptul axei (d) a unui pol de un nume (intersectand numarul maxim de linii de camp magnetic), cealalta latura a spirei se afla in dreptul axei (d) a polului urmator de alt nume (intersectand, de asemenea, numarul maxim de linii de camp magnetic). Daca se noteaza cu y1 distanta dintre cele 2 laturi ale spirei (manunchiuri in cazul unei bobine), iar cu τ distanta dintre axele a doi poli consecutivi - pasul polar,atunci se cere indeplinirea conditiei: y1= τ. In general pasul bobinei se ia y1≈ τ, deoarece nu totdeauna in practica este indeplinita cu rigurozitate egalitatea. In fig.2 s-au trasat doua curbe de variatie a inductiei Bδ(α): una pentru curentul de excitatie nominal Ie, -curba 1 si alta pentru jumatate din valoarea acestuia Ie, -curba 2. Daca masina este nesaturata, cele doua curbe au ordonatele in raportul 2:1, daca masina prezinta saturatie, mai pronuntata la valori mari ale lui Ie, atunci raportul ordonatelor este mai mic de 2. Avand in vedere periodicitatea reprezentarii, se poate constata ca unghiul dintre axele a doi poli consecutivi de nume contrare este de π rad. iar unghiul dintre axele a doi poli consecutivi de acelasi nume este de 2π rad.el. Revenind la fig. 1, la masina cu p=2, se constata ca unghiul dintre axele a doi poli consecutivi de nume contrare este de π/2 rad.(geom.) iar unghiul dintre axele a doi poli consecutivi de acelasi nume este de π rad.(geom.). La o masina multipolara, cu p perechi de poli, unghiul dintre axele a doi poli consecutivi de nume contrar va fi de π/p, iar unghiul dintre axele a doi poli consecutivi de acelasi nume este de 2π/p rad.(geom.). Se poate scrie relatia generala dintre unghiurile electrice si cele geometrice:
![]() (3)
(3)
In cazul cand spira luata in discutie se afla cu laturile sale in dreptul a doua axe consecutive (q) (unde campul magnetic este nul) numarul de linii intersectate in procesul rotirii este nul iar tensiunea indusa in spira este nula. Acest moment este favorabil trecerii capetelor spirei prin situatia de scurtcircuitare de catre perii. Se spune ca periile trebuie plasate in axa neutra a masinii pentru a se realiza o comutatie acceptabila. Aceasta exprimare se refera, de fapt, la pozitia laturilor sau manunchiurilor bobinei care sunt scurtcircuitate de perii. Daca bobinele sunt realizate cu laturile plasate simetric fata de axa spirei, asa cum se vede pe fig.2, avand capetele legate la doua lamele vecine ale colectorului, peria care scurtcircuiteaza spira trebuie sa se afle fizic, (vazuta de un observator din exterior cu privirea orientata in directia axei longitudinale a rotorului) -pe directia axei polului inductor.
2.Campul magnetic creat de indusul masinii de curent continuu
Campul magnetic al indusului (rotorului) masinii de curent continuu este creat de infasurarile plasate in crestaturile rotorice si se mai numeste si camp de reactie a indusului. Conductoarele infasurarilor rotorului parcurse de curetul Ia realizeaza pe periferia armaturii o succesiune de poli magnetici cu polaritati care alterneza, numarul polilor magnetici pe intrega masina fiind 2p. La masinile bipolare, de exemplu, care au periile plasate in axa neutra, indusul se asimileaza unui cilindru pe a carei suprafata se gasesc 2 "paturi de curent" parcurse de curenti de sensuri contrare, care prin solenatia pe care o produc, determina un camp magnetic a carui axa este orientata pe directia axei transversale, q.
In fig. 3 se reprezinta liniile de camp create de infasurarea rotorica a masinii tetrapolare in situatia plasarii periilor in axa neutra. Daca se aplica legea circuitului magnetic pe un traseu inchis T, similar cu cazul analizat mai sus, se obtine expresia inductiei in intrefier creata de infasurarea rotorica:
![]() (4)
(4)
unde ΣWa este numarul de conductoare rotorice inlantuite de traseul T. Acest numar depinde la randul sau de unghiul α, anume: pentru α=π/2 [rad. el.], ΣWa=0 iar pentru α=π, ΣWa=N/2a (maxim). Altfel spus, campul magnetic creat de infasurarea rotorica este nul pe directia axei (d). Combinand cele doua dependente, ΣWa(α) si δ(α) se poate trasa intr-o diagrama desfasurata, functia Bδa(α) - curba 1 din fig. 4.
In
cazul masinii idealizate, la care intrefierul este acelasi pe
intreaga periferie a masinii, inductia creata de o
patura de curent uniform distribuita pe circumferinta
rotorului (cand numarul de conductoare de pe rotor tinde la infinit) ar avea
o distributie triunghiulara, data de segmentele 2, din fig. 4.
Curba 3 reprezinta dependenta inductiei creata de
infasurarea inductoare. Asadar, inductia creata de
rotor trece prin 0 pe directia
axei d a masinii, si
actioneaza preponderent pe directia transversala q. In axa q valoarea sa este totusi diminuata datorita
intrefierului mare prezent in acea zona. Pe intervalul ![]() Bδa se scade din Bδ0 , apoi, pentru
Bδa se scade din Bδ0 , apoi, pentru![]() cele 2 inductii se aduna s.a.m.d. Exista
jumatati ale pieselor polare unde cele doua campuri se
aduna intercalate de jumatati ale pieselor polare unde
campurile se scad. Interventia saturatiei conduce la o oarecare
diminuare a valorii medii pe un pas polar a inductiei rezultante. Se mai
observa un alt aspect, anume: campul de reactie a indusului se
inchide preferential pe directie transversala prin talpa
polara , in timp ce campul inductor se inchide pe directie
longitudinala (perpendiculara pe precedenta). O analiza mai
detaliata a efectelor prezentei acestor campuri ce
actioneaza pe directii ortogonale, se va intreprinde ulterior,
cand se vor aborda si mijloacele practice de ameliorare a efectelor
negative ce decurg din suprapunerea acestor campuri, fenomenele intalnite fiind
specifice masinilor de c.c.
cele 2 inductii se aduna s.a.m.d. Exista
jumatati ale pieselor polare unde cele doua campuri se
aduna intercalate de jumatati ale pieselor polare unde
campurile se scad. Interventia saturatiei conduce la o oarecare
diminuare a valorii medii pe un pas polar a inductiei rezultante. Se mai
observa un alt aspect, anume: campul de reactie a indusului se
inchide preferential pe directie transversala prin talpa
polara , in timp ce campul inductor se inchide pe directie
longitudinala (perpendiculara pe precedenta). O analiza mai
detaliata a efectelor prezentei acestor campuri ce
actioneaza pe directii ortogonale, se va intreprinde ulterior,
cand se vor aborda si mijloacele practice de ameliorare a efectelor
negative ce decurg din suprapunerea acestor campuri, fenomenele intalnite fiind
specifice masinilor de c.c.
Pentru realizarea comutarii curentilor, in vederea mentinerii sensului momentului
care asigura deplasarea rotorului, se utilizeaza doua solutii, diametral opuse:
Comutatia mecanica
Comutatia electronica
O schema de principiu a unui servomotor de curent continuu cu comutatie mecanica este prezentata in figura 5.24.
Fig.5.24 Motor de curent continuu cu comutatie mecanica
Statorul cuprinde poli magnetici, realizati cu ajutorul magnetilor permanenti, iar
rotorul este bobinat si alimentat cu tensiune, prin intermediul unui sistem colector perii. Fiecare capat al unui conductor (fig.5.22) este scos la o lamela a colectorului, iar comutarea sensului curentului se realizeaza prin contactul cu una din cele doua perii, care isi pastreaza polaritatea .
La un servomotor, periile sunt plasate in asa fel, incat vectorul curentului este mentinut perpendicular pe directia campului magnetic de excitatie, pentru oricare
pozitie a rotorului. Astfel, momentul motor rezultat va fi proportional cu curentul care strabate infasurarea motorului, iar viteza unghiulara a motorului va fi proportionala cu tensiunea. Ecuatiile clasice care definesc un motor de c.c sunt:
Moment motor (Mm) = km I (5.13)
Eg = Tensiune contra-electromotoare = ke w
unde km este o constanta a momentului, ke este o constanta a tensiunii si w este viteza unghiulara a motorului. Un dezavantaj important al acestui tip de motor consta este determinat de "limita de comutatie", la care apare o scanteiere puternica la perii, care reduce drastic durata de functionare a motorului, paraziteaza semnalele radio si limiteaza nivelele tensiune/curent. Intrucat solutia presupune rotatia infasurarilor alimentate cu curent si a colectorului aferent, efectele constau intr-un moment de inertie mai mare si un regim termic mai nefavorabil, intrucat caldura, dezvoltata mai ales in rotor, are putine cai de
disipare. Solutiile mai recente au cautat sa inlature aceste neajunsuri, prin schimbarea rolurilor statorului si rotorului, respectiv polii magnetici, realizati din magneti permanenti, sunt amplasati in rotor, iar infasurarile, alimentate cu tensiuni electrce, in stator. Aceste motoare, cu comutatie electronica, se numesc si motoare fara perii (brushless DC motors = BLDC).
Fig.5.25 Principiul de functionare a unui motor de c.c. cu comutatie electronica
Principiul de functionare a unui astfel de motor poate fi inteles cu ajutorul figurilor
si 5.27, iar in figura 5.28 este prezentat si blocul tranzistoarelor de putere care comanda alimentarea fazelor. In figura 5.25 sunt redate cele 6 cadrane electrice, semnificative pentru un motor cu 3 infasurari statorice, u-x, v-y, w-z, si 2 poli rotorici, defazate intre ele cu 60 / (3 faze x 2 poli)). In fiecare cadran se arata care trebuie sa fie sensul curentilor, astfel incat sa se mentina un moment pentru deplasarea rotorului in sensul orar. Pentru o comutare riguroasa a curentilor prin infasurarile statorului, in sincronism cu pozitia rotorului, este necesar un senzor, care sa determine, in permanenta aceasta pozitie.
In figura 5.26 este prezentat un astfel de senzor, constituit din trei traductoare (in
general, elemente Hall, prin dreptul carora se deplaseaza un obturator, solidar cu
rotorul. S-a presupus ca, daca obturatorul se gaseste in dreptul unui traductor, iesirea acestuia este "1" logic, iar daca traductorul nu este influentat de obturator, iesirea lui este "0" logic. Senzorul genereaza astfel 6 combinatii binare distincte, pentru cele 6 cadrane (fig.5.25), iar sistemul de comanda trebuie sa asigure pentru fiecare combinatie, care corespunde unei anumite pozitii a rotorului, configuratia de curenti prin infasurari, indicata in figura 5.27.
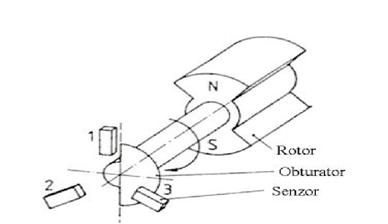
Fig.5.26 Constructia rotorului
Fig.5.27 Diagramele de timp ale semnalelor
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3388
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved