| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Circuite integrate pentru comanda servomotoarelor de curent continuu
1 Circuite integrate pentru comanda motoarelor de c.c. cu perii
In cazul multor sisteme mecatronice, cum ar fi robotii mobili, echipamentele periferice ale calculatoarelor, autovehiculele etc. se utilizeaza servomotoare de curent continuu cu comutatie mecanica. Structura de baza a acestor servomotoare si a amplificatoarelor de putere, care servesc la comanda lor, este unitara in intreaga lume. Controlul bi-directional presupune utilizarea unor punti in H, care contin patru tranzistoare de putere, si sunt comandate cu semnale PWM, generate de un procesor numeric. Viteza motorului de curent continuu poate fi modificata prin schimbarea latimii impulsurilor utilizate pentru comanda tranzistoarelor de putere. Exista un numar foarte mare de circuite integrate, cu diferite nivele de complexitate si de la multe firme producatoare, care includ punti de putere in H, cum ar fi: L293/L293D, LMD18200, LMD18201, LMD18245, L6227 etc.
Circuitele L293 si L293D, de exemplu, contin cate patru semipunti care suporta
curenti electrici mari. L293/L293D au fost proiectate pentru comutarea bi-directionala a unor curenti de pana la 1 A/600 mA, cu tensiuni cuprinse intre 4,5 si 36 V. Ambele circuite sunt concepute pentru a comanda sarcini inductive, cum ar fi relee, electromagneti, motoare de curent continuu, MPP cu comanda bipolara etc. Toate intrarile sunt compatibile TTL, iar semipuntile sunt activate pe perechi, cu ajutorul semnalelor de validare 1,2 EN pentru semipuntile 1 si 2 (fig.5.32), respectiv 3,4 EN pentru perechea 3 si 4. Daca intrarile de validare (enable) sunt in starea "High (H)" (1 logic), tranzistoarele din componenta semipuntilor respective conduc si iesirile sunt active si in faza cu intrarile. Cand intrarile de validare (enable) sunt in starea "Low (L)" (0 logic) tranzistoarele de putere corespunzatoare sunt blocate, iar iesirile semipuntilor sunt in starea de inalta impedanta. Pentru o configuratie adecvata a semnalelor de validare, fiecare perche de semipunti configureaza o punte H pentru comanda motorului (vezi fig.5.32 pentru perechile 1 si 2). Intrarile 1A si 2A determina sensul de rotatie a motorului: 1A - L si 2A -H sens orar; 1A - H si 2A -L sens antiorar. Trecerea ambelor intrari in starile low sau high are ca efect franarea rapida a
motorului.
Fig. 5.32 Controlul bi-directional al unui motor de c.c. cu L293
Multi roboti mobili consacrati si comercializati pe piata, utilizeaza aceste circuite
integrate. In figura 5.33 este prezentata solutia hardware pentru comanda celor doua motoare ale robotului RUG WARRIOR [Rug Warrior]. Cele doua punti H ale circuitului L293D comuta curentii in motoare, utilizand liniile PA5 and PA6 ale portului A pentru comanda in latime a impulsurilor (PWM) si liniile PD4 and PD5 ale portului D directia de rotatie. Microcontroller-ul utilizat pentru comanda este MC68HC11, de 8 biti, al firmei Motorola Semiconductor. Un alt robot foarte cunoscut, KEPHERA [Kephera], foloseste aceeasi solutie, cu un controller 68HC11 care comanda patru motoare de c.c, prin intermediul a doua circuite L293D.
Fig. 5.33 Circuitul L293D utilizat pentru comanda motoarelor robotului Rug Warrior
Motoarele de c.c de putere mai mare impun utilizarea unor circuite integrate mai
puternice si mai sofisticate. Un exemplu este L6227, produs de firma SGS-Thomson Microelectronics, care contine doua punti complete DMOS. Circuitul este realizat in tehnologia MultiPower BCD, care combina tranzistoarele de putere DMOS cu circuite CMOS si bipolare, integrate in acelasi chip.
Dispozitivul include doua circuite independente pentru reglarea, prin "choppare" a
curentilor PWM. Controlul curentilor presupune masurarea acestora cu ajutorul unor senzori de curent, simple rezistoare externe, montate intre tranzistoarele de putere inferioare si masa, a caror tensiune la borne este proportionala cu curentii din motor. L6227 asigura o protectie nedispativa la supra-curenti in partea superioara a tranzistoarelor de putere MOSFET si o blocare a circuitului la supraincalzire (thermal shut-down) (fig.5.34). Intrarile de control (EN, IN1, IN2) au roluri similare cu cele de la L293.
Fig. 5.34 Diagrama bloc a circuitului L6227
Multe dintre actionarile autovehiculelor utilizeaza servomotoare de c.c clasice, cu comutare mecanica. In capitolul 2 a fost prezentat sistemul de actionare a unei usi, care include patru motoare, pentru inchiderea/deschiderea ferestrei, reglarea oglinzii retrovizoare dupa 2 coordonate (x-y) si blocarea usii in sistemul de inchidere centralizata. In figura 2.5 intervin mai multe circuite integrate, proiectate si realizate pentru comanda acestor motoare. Circuitele pentru autovehicule au anumite particularitati, legate de alimentarea de al sistemul baterie - alternator&redresor si, implicit, de regimurile tranzitorii la care sunt supuse, si de integrarea, in unele dintre ele, a unor interfete, care permit conectarea la retelele de comunicatie din autovehicul. Se vor prezenta, succint, doua circuite a caror documentatie bprecizeaza ca sunt destinate, in principal, pentru comanda motoarelor de c.c. in autovehicule. Circuitul TD340 [SGS-THOMSON] contine o punte H, formata din patru tranzistoare de putere MOSFET, pentru comanda unui motor de c.c. Suporta, datorita tehnologiei sale speciale, fara o protectie speciala, regimurile tranzitorii caracteristice regimului de functionare a unui autovehicul. Viteza si sensul de rotatie ale motorului sunt comandate prin intermediul semnalelor IN1 and IN2 (fig.5.35).
Tensiunea de alimentare a infasurarii motorului este controlata prin modularea latimii impulsurilor (PWM), aplicate tranzistoarelor de putere inferioare. Functiunea PWM poate fi realizata intern, atunci cand pinul de intrare este conectat la un semnal analogic, sau poate fi dirijata direct de procesorul numeric, printr-un semnal digital.
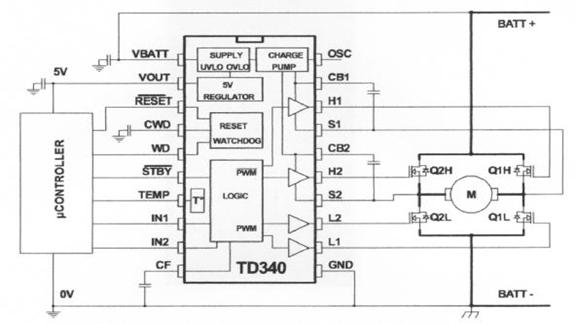
Fig.5.35 Schema de conectare si diagrama bloc pentru circuitul TD340
O logica ingenioasa de rectificare sincrona, care actioneaza asupra tranzistoarelor de putere superioare, reduce disiparea de caldura datorita supresarii. TD340 integreaza un regulator de tensiune de 5V, cu o iesire corespunzatoare pentru alimentarea microcontroller-ului, un circuit de resetare si un circuit Watchdog. Logica interna de siguranta dezactiveaza circuitul TD340 (MOS off) cand sunt sesizate conditii de functionare anormale: supratensiune (OVLO - Over Voltage LockOut), subtensiune (UVLO - Under Voltage LockOut) sau pierderea controlului de catre procesorul numeric (watchdog).
Un alt circuit integrat destinat comenzii motoarelor de c.c din dotarea autovehiculelor este L9904 [SGS-THOMSON]. Circuitul a fost proiectat pentru a comanda patru tranzistoare MOS externe, in punte H, pentru actionari cu motoare de curent continuu in autovehicule. Include o interfata de comunicatie compatibila cu standardul ISO9141. O aplicatie tipica este prezentata in figura 5.36 Dispozitivul este controlat prin intermediul a trei intrari CMOS: EN, DIR si PWM. Este activat cand intrarea EN (enable) este in starea HIGH. Cand intrarea EN nu este conectata sau este in starea LOW, dispozitivul este inactiv (in modul "standby"). Intrarile DIR si PWM comanda driver-ele tranzistoarelor externe de putere. Directia motorului este selectata cu ajutorul intrarii DIR, iar regimul de incarcare si frecventa cu intrarea PWM. DG reprezinta o iesire de diagnosticare, care asigura o detectare, in timp real, a urmatoarelor erori, care au ca efect inactivarea circuitului: supraincalzire, supratensiune, subtensiune, scurtcircuit. Aceasta iesire open- drain, cu rezistenta pullup interna, este in starea LOW, daca se detecteaza una din erorile mentionate.
Fig.5.36 Exemplu de utilizare a circuitului L9904
2 Circuite integrate pentru comanda servomotoarelor de c.c fara perii (BLDC)
Comanda BLDC este mai complicata decat cea a servomotoarelor cu perii, intrucat comutarea fazelor statorului trebuie sa fie sincronizata cu pozitia rotorului. Aceasta poate fi determinata cu ajutorul unui senzor intern, bazat pe traductoare Hall, care genereaza secvente binare distincte pentru fiecare cadran electric semnificativ (vezi figurile 5.26 si 5.27), sau prin sesizarea trecerilor prin zero ale tensiunii contraelectromotoare in faza nealimentata
Un motor de c.c cu comutatie electronica este caracterizat printr-un regim de functionare cu doua faze active ("two phases ON"), lucru demonstrat in sectiunea
5.3.1, cu ajutorul figurii 5.25 Producerea momentului motor se bazeaza principiul
alimentarii cu curent electric a doua din cele trei faze statorice, in fiecare moment, si pe faptul ca, la trecerile prin zero ale tensiunii contra-electromotoare nu se genereaza moment. Fig.5.37 prezinta formele de unda ale tensiunii contra-electromotoare ale servomotorului de c.c. fara perii in regimul cu 2 faze active. Sesizarea tensiunii contraelectromotoare presupune circuite mai complexe, cu convertoare analog-numerice si logica PWM. In acest capitol va fi prezentat, sumar, microcontroller-ul de 8biti, ST72141K [SGS-THOMSON], conceput pentru comanda motoarelor electrice,. Solutii adecvate sunt oferite de DSP-uri, cum ar fi TMS320C240 al lui Texas Instruments, un DSP optimizat pentru comanda numerica a motoarelor electrice.
Fig. 5.37 Forme de unda ale tensiunii contra-electromotoare in regimul cu 2 faze active
Un circuit capabil sa asigure comanda unui servomotor de c.c. fara perii, in baza
informatiilor de la un senzor de pozitie a rotorului, este L6229. Suporta tensiuni de lucru intre 8 si 52 V si un varf de curent la iesire de 2,8 A (1,4 A c.c.). Dispozitivul include toate circuitele necesare pentru comanda unui motor de c.c. cu trei faze statorice: o punte DMOS trifazica; un controller de curent PWM; o logica de decodificare pentru traductoare Hall unipolare, care genereaza secventa de alimentare a fazelor, permitand optiuni de decodificare pentru traductoare decalate spatial cu 60 sau 120 . Circuitul L6229 asigura si o protectie nedisipativa la supracurenti, pe tranzistoarele MOSFET de putere superioare si o blocare a circuitului la supraincalzire (thermal shutdown).
Conectorul TACHO reprezinta o iesire open-drain de tip frecventa-tensiune, furnizata de un circuit care integreaza impulsurile primite de la traductorul Hall 1 (pinul H si inlesneste algoritmului de comanda utilizarea unei bucle de reactie dupa viteza, fara a fi necesar un senzor de viteza suplimentar.
O schema simplificata a controllerului PWM este prezentata in fig.5.38. Circuitul de control al curentului urmareste nivelul curentului din punti, pe baza caderii de tensiune la bornele unui rezistor extern - senzorul de curent - conectat intre sursa celor 3 tranzistoare de putere MOS inferioare si masa. Cand curentul prin motor creste, se mareste, proportional, si tensiunea la bornele senzorului de curent. Daca aceasta depaseste tensiunea de referinta aplicata pe pinul de intrare VREF, iesirea comparatorului comuta si declanseaza monostabilul care blocheaza puntea.
Tranzistoarele de putere MOS raman blocate pe parcursul perioadei de timp
corespunzatoare impulsului de la iesirea monostabilulului si curentul in motor se
inchide prin jumatatea superioara a puntii, in modul de scadere lenta (Slow Decay Mode). Cand monostabilul revine in starea initiala, se restabileste curentul prin punte. Pinii FWD/REV, BRAKE, EN, H , H si H sunt compatibili TTL/CMOS si, accesibili, in consecinta, unui procesor numeric. Comanda iesirilor puntii de putere trifazice se realizeaza cu ajutorul unui circuit logic combinational, in concordanta cu semnalele receptionate de la cele 3 traductoare Hall, care detecteaza pozitia rotorului.
Aceasta logica identifica pozitiile pentru traductoare decalate spatial cu 60, 120, 240 si 300 de grade electrice. Dintre cele opt combinatii binare posibile, pe care le pot furniza cele 3 traductoare binare, cate sase combinatii sunt valide pentru fiecare varianta de pozitionare spatiala a traductoarelor, iar fiecarei combinatii valide (H , H H ) ii corespunde o configuratie a iesirilor (OUT , OUT , OUT
Fig. 5.38 Schema simplificata a controllerului de curent PWM
Realizarea unui servomotor de c.c. fara perii, care sa nu impuna utilizarea unui senzor de pozitie, presupune detectarea si analiza tensiunii contra-electromotoare. Pentru motoare cu forme de unda trapezoidale (fig.5.39), metoda cea mai des folosita consta in masurarea directa a tensiunii contra-electromotoare analogice. Motorul functioneaza cu cate doua faze alimentate simultan, cu perioade de comutatie de 60 si detectarea momentelor de comutatie se realizeaza prin masurarea tensiunii contra-electromotoare in faza nealimentata. In particular, trecerile prin zero ale tensiunii contraelectromotoare dau indicatii precise despre pozitia rotorului si pot fi utilizate, in acelasi mod ca si semnalele de la traductoarele Hall, pentru a realiza comutarea tranzistoarelor de putere ale puntii (fig.5.39).
Fig. 5.39 Masurarea directa a tensiunii contra-electromotoare
Au fost proiectate si realizate multe circuite integrate inteligente, capabile sa asigure comanda fara senzori de pozitie a servomotoarelor de c.c. cu comutatie electronica. In acest capitol va fi prezentat, sumar, circuitul ST72141K, un microcontroller de 8 biti, care include functia de comanda a unui motor de c.c. fara perii, un convertor analognumeric, timere de 16 biti si o interfata SPI. Apartine familiei de microcontrollere ST7 [SGS-THOMSON], capabile sa identifice trecerile prin zero ale tensiunii contraelectromotoare, cu ajutorul unui patent al firmei, care utilizeaza un grup de rezistente. Blocul de comanda a motorului, integrat in circuitele din familia ST7, poate fi rezumat la un generator de semnale PWM, multiplexate pe sase canale, si un detector al trecerilor prin zero ale tensiunii contra electromotoare, pentru comanda fara senzor de pozitie a unui motor de c.c fara perii, si permite diferite regimuri de functionare:
Controlul secventelor de comutatie, cu reglarea tensiunii si limitarea curentului;
Controlul secventelor de comutatie, cu reglarea curentului din infasurari, si deci, cu controlul direct al momentului motor;
Controlul comutatiei fazelor motorului, cu sau fara senzori de pozitie;
Detectarea, cu inalta precizie, a trecerilor prin zero ale tensiunilor contraelectromotoare. Comparatorul integrat pentru tensiunea fazelor receptioneaza direct, fara atenuare, intreaga tensiune contra-electromotoare. Pot fi detectate nivele de pana la 200 mV, cu o inalta imunitate la zgomote si comutarea automata intr-o gama larga de viteze;
Detectarea in timp real a demagnetizarii infasurarii motorului, pentru reglarea fina a intervalului de timp pana la inceperea monitorizarii tensiunii contraelectromotoare;
Intarzieri automate sau programabile intre trecerile prin zero ale tensiunii contraelectromotoare si comutarea fazelor motorului.
Cateva dintre principalele caracteristici ale blocului de comanda a motorului sunt:
Doua comparatoare analogice, unul pentru detectarea trecerilor prin zero ale
tensiunii contra-electromotoare, cu hysteresis de 100 mV, altul pentru reglarea si
limitarea curentului;
Posibilitatea selectarii unuia dintre patru tensiuni de referinta pentru comparatorul de hysteresis: 0.2 V, 0.6 V, 1.2 V, 2.5 V;
Timer de 8 biti, cu doua registre de comparare si doua registre de captura
Registru de prescalare auto-calibratat cu 16 pasi de divizare;
Multiplicator de 8 x 8 biti;
Multiplexor pentru intrarile fazelor;
Management sofisticat al iesirilor:
- Cele sase canale de iesire pot fi impartite in doua grupe (impar & par);
- Semnalele PWM pot fi multiplexate in grupe de semnale impare, pare sau
combinate, alternativ sau simultan;
- Polaritatea canalelor de iesire poate fi programata, canal cu canal;
- Un bit gestionat prin software forteaza iesirile in starea de inalta impedanta
(HiZ);
- Un pin de intrare "emergency stop" forteaza, asincron, iesirile in HiZ.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3474
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved