| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Universitatea "Lucian Blaga" din Sibiu
Colegiu Universitar
Proiect de diploma
Universitatea "Lucian Blaga" din Sibiu
Colegiu Universitar
Masurarea inductantei bobinelor:
L-metru
Coordonator:
Introducere
Acest aparat masoara inductanta bobinelor in gamele: 100nH - 5 μH si 5 μH - 500mH fara a masura insa factorul de calitate. Masurarea inductantei este posibila pentru bobine care au factorul de calitate mare respective rezistenta serie mai mica maxim 2 ohmi.
Masurarea se face utilizand 2 oscilatoare:
de joasa frecventa construit cu LM339, in gama 100nH < L < 5 μH;
de inalta frecventa construit cu tranzitorul FET, BF256, in gama 100nH < L <5 μH.
Afisarea valorii inductantei se face pe un afisaj LCD 2 x 16 caractere.
Simultan cu afisarea valorii inductantei se indica si
valoarea frecventei oscilatorului. Functionarea aparatului este gestionata de microcontrolerul PIC 16F84 care calculeaza
valoarea inductantei dupa formula L=![]() si
comanda LCD.
si
comanda LCD.
Schimbarea gamei de masura se face cu ajutorul butonului "selectie gama ". Masurarea cu acest aparat se face cu o eroare in medie de 10%.
Cuprins
Introducere
Cap.1 Partea teoretica
1.1 Introducere in microcontrolere pag. 5
1.2 Bobina:parametrii, caracteristici pag.24
1.3 Afisarea LCD.Principii de functionare pag.35
1.4 Metode de programare a Pic-ului pag.39
Cap.2 Partea tehnica
2.1 Scheme bloc pag.44
2.2 Blocul(oscilator cu bobina:LM,FET) pag.45
2.3 Divizorul de frecventa pag.51
2.4 Multiplexorul pag.54
2.5 PIC16F84 pag.56
2.6 LCD(Initializare LCD) pag.59
2.7 Schema logica a programului pag.63
2.8 Sursa de alimentare pag.68
ANEXE : A.1. Schema electronica pag.70
A.2. Cablaje pag.71
A.3. Lista componenete pag.72
A.4. Listarea programului si limbajului de asamblare pag.73
BIBLIOGRAFIE
Mihu P.Ioan - Dispozitive si circuite electronice,vol I.-Editura Alma Mater 2002
Ciugudean Marian - Proiectarea unor circuite electrice,Editura Facla 1983
Badea M,Ristea.I - Tranzistoare cu efect de camp-Editura Tehnica 1982
Edmund Nicolau - Masurari electrice,Editura Tehnica 1989
Vintan Lucian - Exploatarea paralelismului in microprocesoarele avansate,Alma Mater 2001
www.microchip.com
Cap. 1 Partea teoretica
1.1 Introducere in microcontrolere
Istoria microcontrolelor
Este anul 1969, si o echipa de ingineri japonezi de la compania BUSICOM sosesc in Statele Unite cu cerer ea ca unele circuite integrate pentru calculatoare sa fie facute folosind proiectele lor. Propunerea a fost facuta catre INTEL, iar Marcian Hoff a fost desemnat responsabil cu acest proiect. Pentru ca el era cel ce avea experienta in lucrul cu un calculator ( PC) PDP8, i-a venit sa sugereze o solutie diferita fundamental in locul constructiei propuse. Aceasta solutie presupunea ca functionarea circuitului integrat este determinata de un program memorat in el. Aceasta a insemnat ca configuratia ar fi fost mult mai simpla, dar aceasta ar fi cerut mult mai multa memorie decat ar fi cerut proiectul propus de inginerii japonezi. Dupa un timp, cu toate ca inginerii au cautat sa caute o solutie mai simpla, ideea lui Marcian a castigat, si aluat nastere primul microcontroler. In transformarea unei idei intr-un produs finit, Frederico Faggin a fost de un ajutor major pentru INTEL. El s-a transferat la INTEL, si doar in 9 luni a reusit sa scoata un produs din prima sa conceptie. INTEL a obtinut drepturile de a vinde acest bloc integral in 1971. In primul rand ei au cumparat licenta de la compania BUSICOM care nu au avut idee ce comoara avusesera. In timpul acelui an a aparut pe piata un microprocesor numit 4004. Acela a fost primul microprocesor de 4 biti cu viteza 6000 operatii pe secunda. Nu mult dupa aceea, compania americana CTC a cerut de la INTEL si de la Texas Instruments sa faca un microprocesor pe 8 biti pentru folosinta in terminale. Cu toate ca CTC a renuntat la aceasta idee pana la sfarsit, INTEL si Texas Instruments au continuat sa lucreze la microprocesor si in aprilie 1972 a aparut pe piata primul microprocesor de 8 biti sub numele de 8008. Putea sa adreseze 64Kb de memorie si avea 45 de instructiuni si viteza de 300.000 de operatii pe secunda. Acel microprocesor a fost predecesorul tuturor microprocesoarelor de astazi. INEL au continuat dezvoltarile lor pana in aprilie 1974 si au lansat pe piata microprocesorul de 8 biti sub numele de 8080 ce putea adresa 64Kb de memorie si avea 75 de instructiuni, iar pretul incepuse de la 360$.
Intr-o alta companie americana Motorola, si-au dat seama repede ce se intampla, asa ca au lansat pe piata un microprocesor de 8 biti 6800. Costructor sef era Chuck Peddle si pe langa microprocesorul propriu-zis, Motorola a fost prima companie care sa faca alte periferice ca 6820 si 6850. La acel timp multe companii au recunoscut marea importanta a microprocesoarelor si au inceput propriile lor dezvoltari. Chuck Peddle paraseste Motorola pentru a se muta la MOS Technology si continua sa lucreze intensiv la dezvoltarea microprocesoarelor.
La expozitia WESCON din Statele Unite din 1975 a avut loc un eveniment critic in istoria microprocesoarelor. MOS Technology a anuntat ca produce microprocesoarele 6501 si 6502 la 25$ bucata pe care cumparatorii le puteau cumpara imediat. Aceasta a fost atat de senzational incat au crezut ca este un fel de inselaciune, gandind ca competitorii vindeau 8080 si 6800 la 179$. Ca un raspuns la competitorii lor atat INTEL cat si Motorola au scazut preturile lor in prima zi a expozitiei pana la 69.95$ pe microprocesor. Motorola intenteaza repede proces contra lui MOS Technology si contra lui Chuck Peddle pentru copierea protejatului 6800. MOS Technology inceteaza de a mai produce 6501 dar continua sa produca 6502. 6502 este un microcontroler pe 8 biti cu 56 de instructiuni si o capabilitate de adresare directa de 64Kb de memorie. Datorita costului scazut, 6502 devine foarte popular, asa ca este instalat in computere ca :KIM-1, Apple I, Apple II, Atari, Comodore, Acorn, Oric, Galeb, Orao, Ultra si multe altele. Curand apar cativa producatori de 6502 (Rockwell, Sznertek, GTE, NCR, Ricoh si Comodore preiau MOS Technology) ce era in momentul prosperitatii sale vandut la o rata de 15 milioane de microprocesoare pe an!
Altii totusi nu au cedat. Federico Faggin paraseste INTEL, si isi porneste propria sa companie Zilog Inc.
In 1976 Zilog anunta Z80. In timpul crearii acestui microprocesor, Faggin face o decizie cruciala. Stiind ca un mare numar de programe fusesera dezvoltate pentru 8080, Faggin isi da seama ca multi vor ramane fideli acelui microprocesor din cauza marii cheltuieli care ar rezula in urma refacerii tuturor programelor. Astfel el decide ca un nou microprocesor trebuie sa fie compatibil cu 8080, sau ca trebuie sa fie capabil sa execute toate programele care deja fusese scrise pentru 8080. Inafara acestor caracteristici, multe altele noi au fost adaugate, asa ca Z80 a fost un microprocesor foarte puternic la vremea lui. Se putea adresa direct la 64Kb de memorie, avea 176 instructiuni, o singura sursa,mult mai mare viteza de lucru etc. Z80 a fost un succes mare si toata lumea a facut conversia de 8080 la Z80. Se poate spune ca Z80 a fost fara nici o indoiala comercial, cel mai de succes microcontroler de 8 biti a acelui timp. Inafara de Zilog, alti noi producatori apar de asemenea ca :Mostek, NEC, SHARP si SGS. Z80 a fost inima a multor computere ca :Spectrum, Partner, TRS703, Z-3 si Galaxi aici acasa.
In 1976, INTEL iese pe piata cu o versiune imbunatatita de microprocesor pe 8 biti numit 8085. Totusi, Z80 era cu mult mai bun incat INTEL a apierdut batalia. Chiar daca inca cateva microprocesoare au aparut pe piata (6809,2650,SC/MP etc.), totul fusese de fapt deja hotarat. Nu mai erau de facut imbunatatiri importante ca sa-i faca pe producatori sa se converteasca spre ceva nou, asa ca 6502 si Z80 impreuna cu 6800 au ramas ca cei mai reprezentativi ai microprocesoarelor de 8 biti a acelui timp.
Deosebirea dintre microprocesoare si microcontrolere
Microcontrolerul difera de un microprocesor in multe feluri. In primul rand si cel mai important este functionalitatea sa. Pentru a fi folosit, unui microprocesor trebuie sa i se adauge alte componente ca memorie, sau componente pentru primirea si trimiterea de date. Pe scurt, aceasta inseamna ca microprocesorul este inima computerului. Pe de alta parte, microcontrolerul este proiectat sa fie toate acestea intr-unul singur. Nu sunt necesare alte componente externe pentru aplicarea sa pentru ca toate perifericele necesare sunt deja incluse in el.
Astfel,
economisim timpul si spatiul necesare pentru construirea de aparate. Un microcontroler este
un 'calculator pe un chip'. Cuvantul 'micro' sugereaza
marimea redusa a dispozitivului iar 'controler' ne spune ca
dispozitivul poate fi folosit pentru a controla obicte, procese sau evenimente.
Microcontrolerele pot fi gasite in componenta oricarui tip de aparat. Orice aparat care masoara, stocheaza, comanda, calculeaza sau afiseaza informatii este o potentiala gazda pentru un microcontroler.De exemplu orice automobil fabricat astazi este echipat cu cel putin un microcontroler care comanda motorul masinii si adesea chiar cu mai multe pentru comanda sistemelor aditionale din automobil. In calculatoare de birou (PC) se pot gasi microcontrolere in tastatura, modemuri, imprimante si alte periferice. In echipamentele de testare fac posibila adaugarea unor facilitati ca de exemplu memorarea rezultatelor masurarii, afisarea mesajelor si formelor de unda. Produsele de larg consum care includ microcontrolere sunt camerele video, video recorderele, compact-disk (CD) playere si altele. Un microcontroler este similar unui microprocesor. Ambele contin o unitate centrala de prelucrare sau UCP (cenral processing unit). CPU executa instructiuni care indeplinesc operatiile de baza logice, matematice si de curgere a informatiei.
Pentru a construi un calculator complet, microprocesorul necesita memorie pentru pastrarea datelor si programelor, interfete de intrare-iesire (I/O) pentru conectarea dispozitivelor externe cum ar fi tastatura sau monitorul. Spre diferenta de microprocesor, microcontrolerul este un calculator pe un chip deorece el contine si memorie si interfete de intrare-iesire pe langa CPU. Deoarece memoria si interfetele care incap pe un chip sunt limitate, microcontrolerele tind sa fie utilizate in sisteme mai mici care necesita doar un microcontroler si cateva elemente aditionale
Blocurile de baza a microcontrolerului
Unitatea de memorie
Memoria este o parte a microcontrolerului a carei functie este de a inmagazina date.
Cel mai usor mod de a explica este de a-l descrie ca un dulap mare cu multe sertare. Daca presupunem ca am marcat sertarele intr-un asemenea fel incat sa nu fie confundate, oricare din continuturile lor vor fi atunci usor accesibile. Este suficient sa se stie desemnarea sertarului si astfel continuturile lui ne vor fi cunoscute in mod sigur.
Fig.1.1.1
Componentele de memorie sunt exact asa. Pentru o anumita intrare obtinem continuturile unei anumite locatii de memorie adresate si aceasta este totul. Doua noi concepte ne sunt aduse :adresarea si locatia de memorie. Memoria consta din toate locatiile de memorie, si adresarea nu este altceva decat selectarea uneia din ele. Aceasta inseamna ca noi trebuie sa selectam locatia de memorie la un capat, si la celalalt capat trebuie sa asteptam continuturile acelei locatii. In afara de citirea dintr-o locatie de memorie, memoria trebuie de asemenea sa permita scrierea in ea. Aceasta se face asigurarea unei linii aditionale numita linie de control. Vom desemna aceasta linie ca R/W (citeste /scrie). Linia de control este folosita in urmatorul fel : daca r/w=1, se face citirea, si daca opusul este adevarat atunci se face scrierea in locatia de memorie. Memoria este primul element, dar avem nevoie si de altele pentru ca microcontrolerul nostru sa functioneze.
Unitatea centrala de procesare
Sa adaugam alte 3 locatii de memorie pentru un bloc specific ce va avea o capabilitate incorporata de inmultire, impartire, extragere si sa-i mutam continuturile dintr-o locatie de memorie in alta. Partea pe care tocmai am adaugat-o este numita 'unitatea de procesare centrala' (CPU). Locatiile ei de memorie sunt numite registri.
Fig.1.1.2
Registrii sunt deci locatii de memorie a caror rol este de a ajuta prin executarea a variate operatii matematice sau a altor operatii cu date oriunde se vor fi gasit datele. Sa privim la situtia curenta. Avem doua entitati independente (memoria si CPU) ce sunt interconectate, sI astfel orice schimb de informatii este ascuns, ca si functionalitatea sa. Daca, de exemplu, dorim sa adaugam continuturile a doua locatii de memorie si intoarcem rezultatul inapoi in memorie, vom avea nevoie de o conexiune intre menmorie si CPU. Mai simplu formulat, trebuie sa avem o anumita 'cale' prin care datele circula de la un bloc la altul.
Bus-ul de date
Calea este numita 'bus'-magistrala. Fizic, el reprezinta un grup de 8, 16, sau mai multe fire. Sunt doua tipuri de bus-uri : bus de adresa si bus de date. Primul consta din atatea linii cat este cantitatea de memorie ce dorim sa o adresam, iar celalalt este atat de lat cat sunt datele, in cazul nostru 8 biti sau linia de conectare. Primul serveste la transmiterea adreselor de la CPU la memorie, iar cel de al doilea la conectarea tuturor blocurilor din interiorul microcontrolerului.
Fig.1.1.3
In ceea ce priveste functionalitatea, situatia s-a imbunatatit, dar o noua problema a aparut de asemenea: avem o unitate ce este capabila sa lucreze singura, dar ce nu are nici un contact cu lumea de afara, sau cu noi ! Pentru a inlatura aceasta deficienta, sa adaugam un bloc ce contine cateva locatii de memorie a caror singur capat este conectat la busul de date, iar celalat are conexiune cu liniile de iesire la microcontroler ce pot fi vazute cu ochiul liber ca pini la componenta electronica.
Unitatea de intrare-iesire
Aceste locatii ce tocmai le-am adaugat sunt numite 'porti'.Sunt diferite tipuri de porti :intrare, iesire sau porti pe doua-cai. Cand se lucreaza cu porti, mai intai de toate este necesar sa se aleaga cu ce pot urmeaza sa se lucreze, si apoi sa se trimita date la, sau sa se ia date de la port.
Fig.1.1.4
Cand se lucreaza cu el portul se comporta ca o locatie de memorie. Ceva este pur si simplu scris in sau citit din el, si este posibil de a remarca usor aceasta la pinii microcontrolerului.
Porturi de comunicatie
Cu aceasta am adaugat la unitatea deja existenta posibilitatea comunicarii cu lumea de afara. Totusi, acest mod de comunicare are neajunsurile lui. Unul din neajunsurile de baza este numarul de linii ce trebuie sa fie folosite pentru a transfera datele. Ce s-ar intampla daca acestea ar trebui transferate la distanta de cativa kilometri? Numarul de linii si numarul de kilometri nu promite costuri eficiente pentru proiect. Nu ne ramane decat sa reducem numarul de linii intr-un asa fel incat sa nu afectam functionalitatea. Sa presupunem ca lucram doar cu 3 linii, si ca o linie este folosita pentru trimiterea de date, alta pentru receptie si a treia este folosita ca o linie de referinta atat pentru partea de intrare cat si pentru partea de iesire. Pentru ca aceasta sa functioneze, trebuie sa stabilim regulile de schimb ale datelor. Aceste reguli sunt numite protocol. Protocolul este de aceea definit in avans ca sa nu fie nici o neitelegere intre partile ce comunica una cu alta. De exemplu, daca un om vorbeste in franceza, si altul vorbeste in engleza, este putin probabil ca ei se vor intelege repede si eficient unul cu altul. Sa presupunem ca avem urmatorul protocol. Unitatea logica '1' este setata pe linia de transmisie pana ce incepe transferul. Odata ce incepe transferul, coboram linia de transmisie la '0' logic pentru o perioada de timp (pe care o vom desemna ca T), asa ca partea receptoare va sti ca sunt date de primit, asa ca va activa mecanismul ei de receptie. Sa ne intoarcem acum la partea de transmisie si sa incepem sa punem zero-uri si unu-uri pe linia de transmisie in ordinea de la un bit a celei mai de jos valori la un bit a celei mai de sus valori. Sa lasam ca fiecare bit sa ramana pe linie pentru o perioada de timp egala cu T, si la sfarst, sau dupa al 8-lea bit, sa aducem unitatea logica '1' inapoi pe linie ce va marca sfarsitul transmisiei unei date. Protocolul ce tocmai l-am descris este numit in literatura profesionala NRZ (Non-Return to Zero).
Fig.1.1.5
Pentru ca aven linii separate de receptie si de transmitere, este posibil sa receptionam si sa transmitem date (informatii) in acelasi timp. Blocul ce permite acest mod de comunicare este numit blocul de comunicare seriala. Spre deosebire de transmisia paralela, datele sunt mutate aici bit cu bit, sau intr-o serie de biti, de unde vine si numele de comunicatie seriala. Dupa receptia de date trebuie sa le citim din locatia de transmisie si sa le inmagazinam in memorie in mod opus transmiterii unde procesul este invers. Datele circula din memorie prin bus catre locatia de trimitere, si de acolo catre unitatea de receptie conform protocolului.
Unitatea de timer
Acum ca avem comunicatia seriala , putem receptiona , trimite si procesa date.
Fig.1.1.6
Watchdog-ul
Inca un lucru ce necesita atentia noastra este functionarea fara defecte a microcontrolerului in timpul functionarii. Sa presupunem ca urmare a unei anumite interferente (ce adesea se intampla in industrie) microcontrolerul nostru se opreste din executarea programului, sau si mai rau, incepe sa functioneze incorect.
Fig.1.1.7
Bineanteles, cand aceasta se intampla cu un computer, il resetam pur si simplu si va continua sa lucreze. Totusi, nu exista buton de resetare pe care sa apasam in cazul microcontrolerului care sa rezolve astfel problema noastra. Pentru a depasi acest obstacol, avem nevoie de a introduce inca un bloc numit watchdog-cainele de paza. Acest bloc este de fapt un alt contor liber unde programul nostru are nevoie sa scrie un zero ori de cate ori se executa corect. In caz ca programul se 'intepeneste', nu se va mai scrie zero, iar contorul se va reseta singur pana la obtinerea valorii sale maxime. Aceasta va duce la rularea programului din nou, si corect de aceasta data pe toata durata. Acesta este un element important al fiecarui program ce trebuie sa fie fiabil fara supravegherea omului.
Convertorul Analog-Digital
Pentru ca semnalele de la periferice sunt substantial diferite de cele pe care le poate intelege (zero si unu), ele trebuie convertite intr-un mod care sa fie inteles de microcontroler. Aceasta sarcina este indeplinita de un bloc pentru conversia analog-digitala sau de un convertor AD. Acest bloc este responsabil pentru convertirea unei informatii despre o anumita valoare analoga intr-un numar binar si pentru a o urmari pe tot parcursul la un bloc CPU asa ca blocul CPU sa o poata procesa.
Fig.1.1.8
Astfel microcontrolerul este acum terminat, si tot ce mai ramane de facut este de a-l pune intr-o componenta electronica unde va accesa blocurile interioare prin pinii acestei componente. Imaginea de mai jos arata cum arata un microcontroler in interior.
Fig.1.1.9.Cofiguratia fizica a interiorului unui microcontroler
Liniile subtiri ce merg din interior catre partile microcontrlerului reprezinta fire conectand blocurile interioare cu pinii capsulei microcontrolerului. Schema urmatoare reprezinta sectiunea centrala a microcontrolerului.
Fig.1.1.10
Pentru o aplicatie reala, un microcontroler singur nu este de ajuns. Inafara de microcontroler, avem nevoie de un program pe care sa-l execute, si alte cateva elemente ce constituie o interfata logica catre elementele de stabilizare (ce se va discuta in capitolele urmatoare).
Programul
Scrierea programului este un domeniu special de lucru al microcontolerului si este denumit 'programare'. Sa incercam sa scriem un mic program ce il vom crea singuri si pe care oricine va fi in stare sa-l inteleaga.
START
REGISTER1=MEMORY LOCATION_A
REGISTER2=MEMORY LOCATION_B
PORTA=REGISTER1 + REGISTER2
END
Programul adauga continuturile a doua locatii de memorie, si vede totalul lor la portul A. Prima linie a programului este pentru mutarea continuturilor locatiei de memorie 'A' intr-unul din registri unitatii centrale de procesare. Pentru ca avem nevoie si de celelalte date de asemenea, le vom muta de asemenea in celalalt registru al unitatii centrale de procesare. Urmatoarea instructiune instruieste unitatea centrala de procesare sa adauge continuturile celor doi registri sa sa trimita un rezultat obtinut la portul A, incat suma acestei adaugari sa fie vizibila pentru toata lumea de afara. Pentru o problema mai complexa, programul care sa lucreaze la rezolvarea ei va fi mai mare.
Programarea poate fi facuta in catava limbaje ca Assembler, C si Basic care sunt cele mai folosite limbaje. Assembler apartine limbajelor de nivel scazut ce sunt programate lent, dar folosesc cel mai mic spatiu in memorie si da cele mai bune rezultate cand viteza de executie a programului se are in vedere. Pentru ca este cel mai folosit limbaj in programarea microcontrolerelor va fi discutat intr-un capitol ulterior. Programele in limbajul C sunt mai usor de scris, mai usor de inteles, dar sunt mai lente in executare decat programele in Assembler. Basic este cel mai utor de invatat, si instructiunile sale sunt cele mai aproape de modul de gandire a omului, dar ca si limbajul de programare C este de asemenea mai lent decat Assembler-ul. In orice caz, inainte de a va hotari in privinta unuia din aceste limbaje trebuie sa studiati cu atentie cerintele privind viteza de executie, marimea memoriei si timpul disponibil pentru asamblarea sa.
Dupa ce este scris programul, trebuie sa instalam microcontrolerul intr-un aparat si sa-l lasam sa lucreze. Pentru a face aceasta trebuie sa adaugam cateva componente externe necesare pentru functionarea sa. Mai intai trebuie sa dam viata microcontrolerului prin conectarea sa la o sursa (tensiune necesara pentru operarea tuturor instrumentelor electronice) si un oscilator a carui rol este similar inimii din corpul uman. Bazat pe ceasul sau microcontrolerul executa instructiunile programului. Indata ce este alimentat microcontrolerul va executa un scurt control asupra sa, se va uita la inceputul programului si va incepe sa-l execute. Cum va lucra aparatul depinde de multi parametri, cel mai important fiind priceperea dezvoltatorului de hardware, si de expertiza programatorului in obtinerea maximului din aparat cu programul sau.
Microcontrolerul PIC16F84
PIC16F84 apartine unei clase de microcontrolere de 8 biti cu arhitectura RISC. Structura lui generala este aratata in schita urmatoare reprezentand blocurile de baza.
Memoria program (FLASH)-pentru inmagazinarea unui program scris. Pentru ca memoria ce este facuta in tehnologia FLASH poate fi programata si stearsa mai mult decat odata, aceasta face microcontrolerul potrivit pentru dezvoltarea de componenta.
EEPROM-memorie de date ce trebuie sa fie salvate cand nu mai este alimentare. Este in mod uzual folosita pentru inmagazinarea de date importante ce nu trebuie pierdute daca sursa de alimentare se intrerupe dintr-o data. De exemplu, o astfel de data este o temperatura prestabilita in regulatoarele de temperatura. Daca in timpul intreruperii alimentarii aceasta data se pierde, va trebui sa facem ajustarea inca o data la revenirea alimentarii. Asfel componenta noastra pierde in privinta auto-mentinerii.
RAM-memorie de date folosita de un program in timpul executarii sale. In RAM sunt inmagazinate toate rezultatele intermediare sau datele temporare ce nu sunt cruciale la intreruperea sursei de alimentare.
PORTUL A si PORTUL B sunt conexiuni fizice intre microcontroler sin lumea de afara. Portul A are 5 pini, iar portul B are 8 pini.
TIMER-ul LIBER este un registru de 8 biti in interiorul microcontrolerului ce lucreaza independent de program. La fiecare al patrulea impuls de ceas al oscilatorului isi incrementeaza valoarea lui pana ce atinge maximul (255), si apoi incepe sa numere tot din nou de la zero. Dupa cum stim timpul exact dintre fiecare doua incrementari ale continutului timer-ului, poate fi folosit pentru masurarea timpului ce este foarte util la unele componente.
Unitatea cerntrala de prelucrare are rolul unui element de conectivitate intre celelalte blocuri ale microcontrolerului. Coordoneaza lucrul altor blocuri si executa programul utilizatorului.
Fig.1.1.11
CISC, RISC
S-a spus deja ca PIC1684 are o arhitectura RISC. Acest termen este adeseori gasit in literatura despre computere, si are nevoie sa fie explicat aici mai in detaliu. Arhitectura Harvard este un concept mai nou decat von-Neumann`s. S-a nascut din nevoia de marire a vitezei microcontrolerului. In arhitectura Harvard, bus-ul de date bus-ul de adrese sunt separate. Astfel un mare debit de date este posibil prin unitatea de procesare centrala, si bineinteles, o viteza mai mare de lucru. Separand un program de memoria de date face posibil ca mai departe instructiunile sa nu trebuiasca sa fie cuvinte de 8 biti. PIC16F84 foloseste 14 biti pentru instructiuni ceea ce permite ca toate instructiunile sa fie instructiuni de un cuvant. Este de asemenea tipic pentru arhitectura Harvard sa aiba mai putine instructiuni decat von-Newmann si sa aiba instructiuni executate uzual intr-un ciclu.
Microcontrolerele cu arhitectura Harvard sunt de asemenea numite 'microcontrolere RISC'. RISC inseamna Reduced Instruction Set Computer. Microcontrolerele cu arhitectura von-Newmann sunt numite 'microcontrolere CISC'. Titlul CISC inseamna Complex Instruction Set Computer.
Pentru ca PIC16F84 este un microcontroler RISC, aceasta inseamna ca are un set redus de instructiuni, mai precis 35 de instructiuni (de ex. microcontrolerele INTEL si Motorola au peste 100 de instructiuni). Toate aceste instructiuni sunt executate intr-un ciclu cu exceptia instructiunilor jump si branch. Conform cu ceea ce spune constructorul, PIC16F84 ajunge la rezultate de 2:1 in compresia cod si 4:1 in viteza in comparatie cu alte microcontrolere de 8 biti din clasa sa.
Aplicatii :
PIC16F84 se potriveste perfect in multe folosinte, de la industriile auto si aplicatiile de control casnice la instrumentele industriale, senzori la distanta, manere electrice de usi si dispozitivele de securitate. Este de asemenea ideal pentru cardurile smart ca si pentru aparatele alimentate de baterie din cauza consumului lui mic.
Pic16F84, un microcontroller de 8 biti cu un set restrins de vre-o 34 de instructiuni, cu arhitectura de tip RISC (una, maxim doua instructiuni pe tact ) impreuna cu un programator si un compilator ( si un simulator ) devine o jucarie extrem de interesanta pentru un electronist obisnuit cu proiectarea CMOS sau TTL. Memoria EEPROM face mai usoara aplicarea microcontrolerelor la aparate unde se cere inmagazinarea permanenta a diferitor parametri (coduri pentru transmitatoare, viteza motorului, frecventele receptorului, etc.). Costul scazut , consumul scazut, manuirea usoara si flexibilitatea fac PIC16F84 aplicabil chiar si in domenii unde microcontrolerele nu au fost prevazute inainte (exemple:functii de timer, inlocuirea interfetei in sistemele mari, aplicatiile coprocesor, etc.) Programabilitatea sistemului acestui cip (impreuna cu folosirea a doar doi pini in transferul de date) face posibila flexibilitatea produsului, dupa ce asamblarea si testarea au fost terminate. Aceasta capabilitate poate fi folosita pentru a crea productie pe linie de asamblare, de a inmagazina date de calibrare disponibile doar dupa testarea finala, sau poate fi folosit pentru a imbunatati programele la produse finite.
Ciclul de clock / instructiune : clock-ul este un semnal periodic dreptunghiular generat de un oscilator cu frecventa stabila. Clock-ul de la oscilator intra intr-un microcontroler prin pinul OSC1 unde circuitul intern al unui microcontroler divide clock-ul in 4 clock-uri egale Q1,Q2,Q3 si Q4 ce nu se suprapun. Aceste 4 clock-uri constituie un ciclu de o singura instructiune (numit de asemenea ciclu masina) in timpul careia o instructiune este executata.
Executarea instructiunii incepe prin apelarea unei instructiuni care este urmatoarea in linie. Instructiunea este apelata din memoria program la fiecare Q1 si este scrisa in registrul de instructiuni la Q4. Decodarea si executarea instructiunii sunt facute intre urmatoarele cicluri Q1 si Q4. In urmatoarea diagrama putem vedea relatia dintre ciclul instructiunii si clock-ul oscilatorului (OSC1) ca si aceea a clock-urilor interne Q1-Q4. Contorul de program (PC) retine informatia despre adresa urmatoarei instructiuni.
Fig.1.1.12
Pipelining
Ciclul de instructiuni consta din ciclurile Q1, Q2, Q3 si Q4. Ciclurile de instructiuni de apelare si executare sunt conectate intr-un asa fel incat pentru a face o apelare, este necesar un ciclu cu o instructiune, si este nevoie de inca una pentru decodare si executare. Totusi, datorita pipeline-ului sau liniei directe, fiecare instructiune este efectiv executata intr-un singur ciclu. Daca instructiunea cauzeaza o schimbare in contorul programului, si PC-ul nu directioneaza spre urmatoarea ci spre alte adrese (poate fi cazul cu subprogramele jumps sau de apelare), 2 cicluri sunt necesare pentru executarea unei instructiuni. Aceasta este pentru ca instructiunea trebuie procesata din nou, dar de data aceasta din partea adresei corecte. Ciclul incepe cu clock-ul Q1, prin scrierea intr-un registru (IR). Decodarea si executarea incepe cu clock-urile Q2, Q3 si Q4.
Fig.1.1.13
TYCO
citeste instructiunea MOVLW 55h (nu are importanta pentru
noi ce instructiune a fost executata, ce explica de ce nu este
un dreptunghi in partea de jos).
TCYI executa instructiunea MOVLW 55h si citeste
MOVWF PORTB.
TCY2 executa MOVWF PORT si citeste CALL SUB_1.
TCY3 executa o apelare a unui
subprogram CALL SUB_1, si citeste instructiunea BSF PORTA, BIT3.
Pentru ca instructiunea aceasta nu este aceea de care avem nevoie,
sau nu este prima instructiune a unui subprogram SUB_1 a carui
executie este urmatoarea in ordine, instructiunea trebuie
citita din nou. Acesta este un bun exemplu a unei instructiuni avand
nevoie de mai mult de un ciclu.
TCY4 ciclul instructiunii este total folosit pentru citirea primei
instructiuni dintr-un subprogram la adresa SUB_1.
TCY5 executa prima
instructiune dintr-un subprogram SUB_1 si citeste
urmatoarea.
Semnificatia pinilor
PIC16F84 are un numar total de 18 pini. Cel mai adesea se gaseste intr-o capsula de tip DIP18 dar se poate gasi de asemenea si intr-o capsula SMD care este mai mica ca cea DIP. DIP este prescurtarea de la Dual In Package. SMD este prescurtarea de la Surface Mount Devices sugerand ca gaurile pentru pini unde sa intre acestia , nu sunt necesare in lipirea acestui tip de componenta.
Fig.1.1.14
Pinii microcontrolerului PIC16F84 au urmatoarea semnificatie:
Pin nr.1 RA1 Al doilea pin la portul
A. Nu are functie aditionala.
Pin nr.2 RA2 Al treilea pin la portul A. Nu are functi
aditionala.
Pin nr.3 RA3 Al patrulea pin la portul A. TOCK1 care
functioneaza ca timer se gaseste de asemenea la acest pin
Pin nr.4 MCLR Reseteaza intrarea si tensiunea de programare
Vpp a microcontrolerului.
Pin nr.5 VSS Alimentare, masa.
Pin nr.6 RBO Pin de zero la portul B. Intrarea intrerupta este o
functie aditionala.
Pin nr.7 RB1 Primul pin la portul B. Nu are functie
aditionala.
Pin nr.8 RB2 Al doilea pin la portul B. Nu are functie
aditionala.
Pin nr.9 RB3 Al treilea pin la portul B. Nu are functie
aditionala.
Pin nr.10 RB4 Al patrulea pin la portul B.Nu are functie
aditionala.
Pin nr.11 RB5 Al cincilea pin la portul B. Nu are functie
aditionala.
Pin nr.12 RB6 Al saselea pin la portul B. Linia de 'Clock' in mod
programare.
Pin nr.13 RB7 Al saptelea pin la portul B. Linia 'Data' in mod
programare.
Pin nr.14 Vdd Polul pozitiv al sursei.
Pin nr.15 OSC2 Pin desemnat pentru conectarea la un oscilator
Pin nr.16 OSC1 Pin desemnat pentru conectarea la un oscilator
Pin nr.17 RA2 Al doilea pin la portul A. Nu are functie
aditionala.
Pin nr.18 RA1 Primul pin la portul A. Nu are functie
aditionala.
1.2 Bobina. Metode de masurare a bobinei
Bobinajele se executa din materiale care se caracterizeaza prin conductivitate electrica ridicata, printr-o rezistenta mecanica suficienta, precum si prin rezistenta la eroziune chimica.Materialul cel mai des folosit in calitate de conductor este cuprul, care are conductivitate electrica foarte buna si nu prezinta dificultati la prelucrarea tehnologica.Conductoarele din aluminiu se folosesc numai pentru bobinele instalatiilor de putere.Suportul, pe care se infasoara conductorul bobinei, trebuie sa permita bobinarea usoara, efectuarea cu usurinta a conexiunilor, fixarea simpla si montarea comoda a miezului magnetic, prezentand in acelasi timp o rezistenta mecanica satisfacatoare.
Calculul inductivitatii
Calculul inductivitatii se face anterior realizarii bobinei, in general cu formule semiempirice.
-pentru bobine fara miez,cu un singur strat,spira langa spira:
L0= ![]() [μH] (1.2.1)
[μH] (1.2.1)
d este diametrul mediu al bobinei in mm, l este lungimea in mm,iar n numarul de spire.
-pentru bobine cu mai multe straturi:
L0=![]() [μH] (1.2.2)
[μH] (1.2.2)
d este diametrul mediu al bobinei in mm, l -lungimea in mm,h-inaltimea bobinei in mm.
Miezuri magnetice
Pentru obtinerea inductivitatilor de valori mari,infasurarea bobinei se dispune pe miezuri magnetice.Miezul magnetic impreuna cu eventualele intrefieruri formeaza un circuit magnetic care are calitatea de a concentra aproape integral liniile campului magnetic.
Ciclul histerezis
Materialele magnetice utilizate pentru miezurile bobinelor sunt neliniare din punctul de vedere al comportarii in camp magnetic exterior.Neliniaritatea se exprima prin dependenta inductieie magnetice B de intensitatea campului magnetic H, printr-o functie neliniara.Crescand intensitatea H a campului magnetic, inductia magnetica B creste, tinzand catre valoarea de saturatie B.
Atomii materialelor magnetice avand moment magnetic propiu, iar momentele atomice vecine fiind orientate identic, se formeaza domenii cu magnetizare spontana.Pe ansamblu, domeniile sunt astfel orientate, incat materialul prezinta magnetizare remanenta.La aplicarea unui camp magnetic exterior apare o deplasare a domeniilor magnetice, ceea ce macroscopic se manifesta printr-o dependenta de tip histerezis a inductiei magnetice B, de intensitate H a campului magnetic.Din punct de vedere al orientarii momenteleor magnetice atomice, materialele pot fi feromagnetice sau ferimagnetice.Feromagneticele au momentele magnetice elementare orientate toate in acelasi sens.Materialele ferimagnetice au in structura lor doua sau mai multe subretele magnetice, avand fiecare magnetizare spontana, momentele magnetice fiind orientate in sens contrar, dar unul dintre momente este mai mare in valoare absoluta.Magnetizarea spontana exista numai pana la o anumita temperatura T, numita temperatura Curie,a carei valoare depinde de material.Dupa depasirea temperaturii T energia termica a retelei depaseste energia interactiunii de schimb, domenile de magnetizare dispar, materialul fiind paramagnetic.Din punct ce vedere al ciclului de histerezis, materialele magnetice pot fi moi (cu campul coercitiv H<80A/m,permeabilitate mare, pierderi mici) sau dure (H>80A/m, pierderi mari, dar cu energie mare in intrefier).
Permeabilitatea magnetica
Interactiunea substantei cu campul magnetic este caracterizata de permeabilitatea complexa relativa:
![]() = μ'-j μ'' (1.2.3)
= μ'-j μ'' (1.2.3)
B -inductia magnetica;
H-intensitaea campului magnetic;
μ =4π*10-7 -permeabilitatea vidului;
O bobina ideala, avand in vid inductivitatea L0, in care se introduce un miez magnetic de permeabilitate relativa complexa μ, pentru flux de scapari nul prezinta la borne impedanta:
Z=jωL= jωL0 μ = jω μ'L0 + μ'' ωL0=rm+ jωL (1.2.4)
Bobinele utilizate in echpamente electronice au miezurile realizate din materiale feromagnetice moi.
Inductivitatea bobinei
In cazul bobinelor cu miez inductivitatea este
L= μ efL0 (1.2.5)
Unde L0 este inductivitatea bobinei fara miez, iar μ este permeabilitatea efectiva a miezului, dependenta de permeabilitatea relativa, a materialului miezului, de geometrie si pozitia relativa a miezului fata de bobinaj. Permeabilitatea efectiva se poate calcula numai pentru anumite geometri, de regula se detremina experimental.
Parametrii bobinei
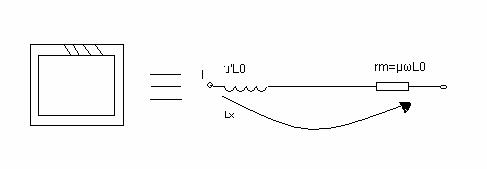
Fig.1.2.1
Parametrul caracteristic al unei bobine este inductivitatea L, definita ca raportul dintre fluxul magnetic propriu sigma si curentul I ce strabate bobina:
L=Ф/I (1.2.6)
Acesta este o marime specifica a bobinei, depinzand numai de forma, dimensiunile si numarul de spire al bobinei, precum si de permeabilitatea relativa a mediului. Pentru bobine dispuse in medii liniare si izotrope, L este constant.In cazul bobinelor cu miez magnetic inductivitatea variaza in functie de semnalul aplicat, datorita permeabilitatii relative cu intensitatea curentului ce strabate bobina.In functinarea cu semnal mic, permeabilitatea relativa este constanta.In functionarea cu semnal mare, inductivitatea variaza in limite largi si trebuie definita fie o inductivitate medie,fie o inductivitate pentru o anumita valoare a curentului.
Valoarea inductivitatii este usor dependenta si de temperatura de lucru atat prin dependenta inductivitatii relative de temperatura cat si prin modificarea dimensiunilor fizice ale bobinei la variatii mari de temperatura.
Un alt parametru al bobinei este rezistenta sa de pierderi r.Fiecare spira a bobinei comporta ca o rezistenta de pierderi in conductor r'e, si o rezistenta de pierderi in materialul magnetic r. Care inglobeaza atat pierderile datorite curentilor turbionari in miezul magnetic,al caror efect este proportional cu patratul frecventei de lucru,cat si pierderile prin histerezis al caror efect este proportional cu f.Pierderile r'c si r'm pot fi echivalate cu o rezitenta in serie cu inductivitatea L' a spirei.In paralel cu grupul serie apare rezistenta de izolare r'p.
Considerand toate cele n spire identice, se poate considera bobina, intr-o prima aproximatie, ca o inductivitate L=nL' in serie cu rc=nr'c si rm=nr'm, tot grupul fiind in paralel cu rp=nr'p.Transpunand efectul rezistentei de izolatie in serie, efectul total de pierderi in bobina este exprimat prin rezistenta serie a bobinei r.Inductivitatea L caracterizeaza comportarea utila a bobinei, ca element pur raectiv, in timp ce r caracterizeaza pierderile de putere activa.
La fiecare frecventa de lucru se defineste pentru bobina, factorul sau de calitate, ca fiind proportional cu raportul dintre energie maxima inmagazinata in campul magnetic al bobinei si energia disipata sub forma de caldura, intr-o perioada.Ca urmare,factorul de calitate se determina din relatia:
![]()
![]()
![]()
![]()
![]() QL (1.2.7)
QL (1.2.7)
Wmax-energia maxima acumulata in campul magnetic al bobinei
Wj0,r-energia disipata prin efect Joule in perioada 0,T
ωL-reactanta bobinei la frecventa corespunzatoare pulsatiei ω=2πf
r -rezistenta echivalenta pierderilor in bobina;
I -valoarea eficace a curentului prin bobina;
QL = ![]() (1.2.8)-factorul
de calitate al bobinei
(1.2.8)-factorul
de calitate al bobinei
Un alt parametru al bobinei este capacitatea sa parazita.Aceasta se datoreste capacitatii parazite C12 dintre doua spire alaturate, care apare in paralel cu L' si r pe fiecare spira, si capacitatilor C10 si C20 ale fiecarei spire fata de masa.Efectul total al acestor capacitati se inglobeaza intr-o capacitate echivalenta parazita Cp, in paralel pe bobina.
Solicitarea bobinei reale in tensiune si curent in functie de tensiune si curent
Curentul ce strabate o bobina si repectiv tensiunea la bornele sale depind de reactanta bobinei XL= ωL, deci vor depinde de frecventa.Pentru a evita deteriorarea bobinei ca urmare unor solicitari electrice, curentul si tensiunea la borne nu trebuie sa depaseasca, in functie de frecventa de lucru, anumite limite.
-in domeniul frecventelor joase solicitarea bobinei se datoreste in principal curentului care da nastere unor forte mecanice de respingere intre spire .In acest domeniu tensiunea la borne creste liniar cu frecventa.Deci pentru a se evita distrugerea bobinei, curentul nu trebuie sa depaseasca valoarea maxima admisibila Imax.
-de la o anumita frecventa f1, apare pericolul de distrugere termica a bobinei, deci trebuie limitata puterea maxima pe care o poate disipa bobina :
Pd max=UI tg∂ (1.2.9)
Deci la frecventa f1 va exista relatia: Pd max =ω1Imax2Ltg∂ (1.2.10)
- pentru o anumita frecventa f2 in domeniul frecventelor inalte depasirea unei tensiuni limitaUmax este interzisa, pentru strapungerile intre spire, deci curentul va avea alta lege de variatie I= Umax/ ωL.
Pmax =![]()
In functie de frecventa apar deci trei domenii in care se impun succesiv restrictii asupra curentului in domeniul frecventelor joase, pana la frecventa critica f1, asupra puterii disipate in domeniul f1- f2 si asupra tensiunii la frecvente mai mari de frecventa critica f2. Frecventele critice satisfac relatia:
f1 f2=![]() (
(
Zgomotul bobinelor
Zgomotul unei impedante se datoreste agitatiei termice a electronilor liberi, de conductie in interiorul impedantei respective.Acest zgomot este un zgomot de fluctuatie, energia sa depinzand de energia cinetica a electronilor liberi, la randul sau determinata de temperatura absoluta a impedantei, independent de regimul electric in care este utilizata aceasta.Bobinele cu pierderi mici se comporta bine din punct de vedere al zgomotului. O sursa de zgomot propiu-zisa o constituie vibratiile mecanice ale miezului din tole nestranse suficient. In general contributia zgomotului nu este importanta.
Fiabilitatea bobinelor
Bobinele sunt elemente cu siguranta in functionare relativ scazuta, defectiunile lor putand conduce si la defectarea altor piese cu care sunt conectate sau alaturi de care sunt montate. La randul lor insa, defectiunile bobinelor pot fi provocate de defectarea altor componente ale sistemului.Fiabilitatea bobinelor este destul de variata in functie de tipul bobinei, domeniul de utilizare, conditiile de constructie, modul de intretinere si exploatare, dar, orientativ rata de defectare poate fi considerata λ=0,01/1000 h.Cele mai frecvente defectiuni sunt intreruperea conductorului sau scurtcircuitul intre spire, temperaturi inalte ce conduc la strapungerea termica a izolatiei, temperaturi prea joase care favorizeaza strapungerea deoarece materialele de etansare pot crapa si astfel este posibila patrunderea umiditatii.Pentru cresterea sigurantei bobinelor se pot lua masuri inca din fabriactie din etapa de proiectare, alegand tipul de bobinaj si de izolatie corespunzator frecventelor si tensiunilor de lucru, tipul de conductor corespunzator puterilor dezvoltate in circuit.
Circuit oscilant serie
Circuitul scilant serie este un dipol pasiv format ditr-o bobina si un condensator, conectate in serie.Impedanta acestui circuit depinde mult de frecventa, ceea ce ii confera propietati selective.Astfel ea atinge un minim la frecventa la care modulul reactantei inductive devine egal cu modulul reactantei capacitive si tinde spre valori foarte mari in afara acestei frecvente.Ca urmare,daca circuitul se excita cu un generator ideal de tensiune, curentul din circuit va depinde mult de frecventa si va atinge maxim pronuntat la freventa de rezonanta, determinand deci o comportare a circuitului.Daca circuitul s-ar excita cu un generator de curent, curentul prin circuit va fi practic constant si independent de frecventa deoarece impedanta circuitului va fi practic constant si independent de frecventa deoarece impedanta circuitului este practic neglijabila, in raport cu rezistenta interna a generatorului. Deci propietatile selective ale circuitului se pierd.
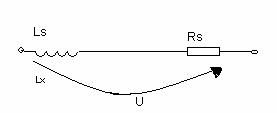
Fig.1.2.2
Comportarea circuitului serie propriu-zis
Se cosidera generatorul de tensiune ideal adica Rg=0
Impedanta circuitului serie Zs, are expresia:
Rs=RL (1.2.13) -rezistenta de pierderi serie a circuitului;
Xs=ωL-![]() (1.2.14) -reactanta circuitului serie;
(1.2.14) -reactanta circuitului serie;
ZS=![]() -modulul impedantei circuitului
serie;
-modulul impedantei circuitului
serie;
φs=arc tg(![]() (1.2.16) -argumentul impedantei circuitului serie.
(1.2.16) -argumentul impedantei circuitului serie.
Expresia curentului I care se stabileste prin circuit este:
Tensiunea UL,UC,UR de la bornele inductantei, condensatorului si rezistorului serie, au expresiile:
UL=jXLI=jωLI (1.2.17)
UC=jXcI=-(![]() )I (1.2.18)
)I (1.2.18)
UR=Rs*I (1.2.19)
Rezonanta circuitului serie
Fenomenul de rezonanta se produce la frecventa ω0 la care:
X(ω0)= ω0L-![]() (1.2.20)
(1.2.20)
De unde se poate deduce expresia frecventei de rezonanta, f0, sub forma:
f0=![]()
Deci rezonanta are loc atunci cand frecventa tensiunii de excitatie, produsa de genaerator, coincide cu frecventa proprie de oscilatie a circuitului.La rezonanta, impedanta circuitului serie este minima si pur rezistiva:
Zs(ω0)=Rs (1.2.22)
Iar curentul prin circuit este maxim si in faza cu tensiune la bornele circuitului:
I(ω0)=![]()
![]()
De asemenea la rezonanta, tensiunile la bornele inductantei si ale condesatorului sunt maxime, egale, in opozitie de faza si de Q ori mai mari decat tensiunea la bornele circuitului :
![]()
![]() =ω0L
=ω0L![]()
![]()
Din propietatile circuitului oscilanta serie aratate rezulta si posibiltatile de utilizare a acestuiu circuit ca circuit selectiv sau ca circuit de rejectie.
Q=![]()
![]() =QL (1.2.25)
=QL (1.2.25)
Caracteristicile de frecventa normate.Banda de trecere la 3dB
x ![]()
![]() ωL-
ωL-![]()
![]()
![]()
![]() )=βQ (1.2.26)
)=βQ (1.2.26)
Q-factorul de calitate a circuitului la frecventa de rezonanta;
Β- escartul de frecventa generalizat
Se observa ca pentru x =1,curentul scade la 0,7 din valoarea de la rezonanta,iar modulul impedantei creste de 1,41 ori fata de valoarea de la rezonanta.
N1[dB]=10log![]() N2[dB]=20log
N2[dB]=20log
N1[dB]-nivelul in decibeli pentru puteri
N2[dB]-nivelul in decibeli pentru tensiuni, curenti, impedante sau admitante.
P(ω)-puterea la frecventa ω;
P (ω0) -puterea de referinta;
K (ω)-marimea la frecventa ω;
K (ω0)-marimea de referinta;
Bobine de audiofrecventa
Se utilizeaza pentru filtru de joasa frecventa (filtre de retea, drosele de alimentare etc. ) Au inductante ce pot ajunge la zeci de Henry. Se realizeaza in general pe miezuri magnetice inchise, in forma de tole sau oale. Tolele se realizeaza din materiale cu permeabilitate magnetica cat mai ridicata (otel cu siliciu, permalloy, ferite, etc.). O particularitate a acestor bobine o constituie dependenta inductantei fata de nivelul tensiunii alternative si continue aplicate, precum si fata de frecventa. Bobinajele se executa pe carcase avand forma miezului, folosind conductor de cupru emailat cu diametru corespunzator curentului care le strabate. In cazul cand sunt strabatute si de o componenta de c.c. se intrerupe circuitul magnetic printr-un intrefier, care imbunatateste comportarea miezului, dar reduce permeabilitatea
Banda de trecere la 3dB
Deoarece, asa cum rezulta din relatia pentru x =1 curentul prin circuit se reduce la 1/√2 din valoarea sa maxima, rezulta ca la frecventele la care x =1, curentul se reduce cu 3dB fata de valoarea sa maxima posibila.Prin definitie, diferenta acestor frecvente corespunzatoare lui x =1 se numeste banda de trecere a circuitului la 3dB.Marimea acestei benzi caracterizeaza propietatile selective ale circutului.Cu cat aceasta banda este mai ingusta,cu atat circuitul este mai selectiv.
Circuitul oscilant derivatie
Circuitul oscilant derivatie este un dipol pasiv format din doua componente pasive reale,o bobina si un condensator,conectate in derivatie.Excitarea sa trebuie facuta cu un generator cu rezistenta interna mare, deoarece un generator cu rezistenta mica va mentine practic constanta tensiunea la bornele circuitului, indiferent de frecventa, astfel ca propietatile selective ale circuitului se pierd. In figura de mai jos se prezinta schema unui circuit derivatie alimentat de un generator pentru a carui reprezentare s-a utilizat schema echivalenta cu generator de curent.Conductanta de pierderi derivatie
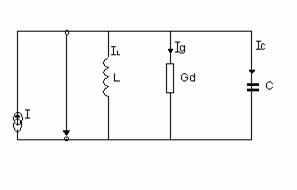
Fig.1.2.3
Gd=Gg+GL+GC (1.2.28)
Gg-conductanta interna derivatie a generatorului
GL-conductanta de pierderi derivatie a bobinei
GC-conductanta de pierderi derivatie a condensatorului.
Pentru Q![]() 10se poate
arata GL=
10se poate
arata GL=![]()
Q0- factorul de calitate in gol al bobinei
RL-rezistenta de pierderi serie a bobinei
Rezonanta circuitului derivatie
Rezonanta se produce la frecventa ω0 la care:
Bd (ω0) = ω0 C- ![]() (1.2.30)
(1.2.30)
f0=![]()
La rezonanta, admitanta circuitului derivatie este minima(deci impedanta maxima) si are expresia:
Yd(ω0)=Gd (conductanta pura) (1.2.32)
Iar tensiunea la bornele circuitului este maxima si in faza cu curentul de alimentare I:
U(ω0)=![]()
![]()
La rezonanta circuitului derivatie,
curentii prin inductanta si capacitate sunt maximi, egali in modul, in opozitie
de faza si de Q ori mai mari decat curentul total debitat de generator, I:![]()
IL(ω0)=Ic(ω0)= ω0CU=QI (1.2.34)
Q=![]()
![]() =ω0Crd=
=ω0Crd=![]() (1.2.35)
(1.2.35)
Rd=![]() -rezistenta de pierderi derivatie a
circuitului (1.2.36)
-rezistenta de pierderi derivatie a
circuitului (1.2.36)
Q=![]() -factor de calitate (1.2.37)
-factor de calitate (1.2.37)
Caracteristicile de frecventa normate:
x=![]()
![]()
![]()
![]() )=βQ (1.2.38)
)=βQ (1.2.38)
1.3 Afisaj LCD
Multe dispozitive cu microcontroler folosesc LCD-uri inteligente pentru a afisa informatia vizuala. Urmatorul material se ocupa de conectarea unui afisaj LCD Hitachi la un microcontroler PIC. Afisajele LCD proiectate cu HD44780, modulul pentru LCD fabricat de Hitachi, nu sunt scumpe si sunt usor de folosit, si chiar posibil sa produca verificarea datelor afisate folosind cei 8x80 pixeli ai afisajului. Afisajele LCD Hitachi contin un set de caractere ASCII plus simboluri japoneze, grecesti si matematice.
|
|
|
16x2 LCD Hitachi HD44780 |
Fiecare dintre cei 640 de pixeli ai afisajului trebuie sa poata fi accesat individual si aceasta se poate realiza cu un numar de integrate SMD pentru control montate pe spatele afisajului. Aceasta ne salveaza de o cantitate enorma de fire si de un control adecvat astfel incat sunt necesare doar cateva linii pentru a accesa afisajul. Putem comunica cu afisajul prin intermediul unui bus de date pe 8 biti sau de 4 biti. Pentru un bus de 8 biti, afisajul are nevoie de o tensiune de alimentare de +5v si 11 linii I/O. Pentru un bus de 4 biti sunt necesare doar liniile de alimentare si 7 linii. Cand afisajul LCD nu este pornit liniile de date sunt TRI-STATE, ceea ce inseamna ca ele sunt in stare de inalta impedanta (ca si cum ar fi deconectate) si astfel nu interfereaza cu functionabilitatea microcontrolerului cand afisajul nu este adresat. LCDul necesita de altfel 3 linii de control de la microcontroler.
Linia Enable (E) permite accesul la afisaj prin intermediul liniilor R/W si RS. Cand aceasta linie este LOW, LCDul este dezactivat si ignora semnalele de la R/W si RS. Cand linia (E) este HIGH, LCDul verifica starea celor doua linii de control si raspunde corespunzator.
Linia Read/Write (R/W) stabileste directia datelor dintre LCD si microcontroler. Cand linia este LOW, datele sunt scrise in LCD. Cand este HIGH, datele sunt citite de la LCD.
Cu ajutorul liniei Register select (RS), LCD interpreteaza tipul datelor de pe liniile de date. Cand este LOW, o instructiune este scrisa in LCD. Cand este HIGH, un caracter este scris in LCD.
Starea logica a liniilor de control:
E: - 0 Accesul la LCD dezactivat;
- 1 Accesul la LCD activate;
R/W: -
0 Scrie date in LCD;
-
1 Citeste date din LCD;
RS: - 0 Instructiuni;
- 1 Caracter;
Scrierea datelor in LCD se realizeaza in cativa pasi:
- se seteaza bitul
R/W LOW;
- se seteaza bitul RS in 0 sau 1 logic (instructiune sau caracter);
- se trimit datele catre liniile de date (daca se executa o
scriere);
- se seteaza linia E HIGH;
- se citesc datele de la liniile de date (daca se executa o citire).
Citirea datelor de la LCD se realizeaza similar, cu deosebirea ca linia de control R/W trebuie sa fie HIGH. Cand trimitem un HIGH catre LCD, el se va reseta si va accepta instructiuni. Instructiunile tipice care sunt transmise catre un afisaj LCD dupa reset sunt: pornirea afisajului, activarea cursorului si scrierea caracterelor de la stanga spre dreapta. In momentul in care un LCD este initializat, el este pregatit sa primeasca date sau instructiuni. Daca receptioneaza un caracter, el il va afisa si va muta cursorul un spatiu la dreapta. Cursorul marcheaza locatia urmatoare unde un caracter va fi afisat. Cand dorim sa scriem un sir de caractere, mai intai trebuie sa setam adresa de start, si apoi sa trimitem cate un caracter pe rand. Caracterele care pot fi afisate pe ecran sunt memorate in memoria video DD RAM (Data Display RAM). Capacitatea memoriei DD RAM este de 80 bytes.
Afisajul LCD mai contine 64 bytes CG RAM ( Character Generator RAM). Aceasta memorie este rezervata pentru caracterele definite de utilizator. Datele din CG RAM sunt reprezentate sub forma de caractere bitmap de 8 biti. Fiecare caracter ocupa maxim 8 bytes in CG RAM, astfel numarul total de caractere pe care un utilizator poate sa le defineasca este 8. Pentru a afisa caracterul bitmap pe LCD, trebuie setata adresa CG RAM la punctul de start (de obicei 0) si apoi sa fie scrise datele in afisaj. Definirea unui caracter ,special' este exemplificata in figura.
Fig.1.3.1
Inainte de a accesa DD RAM, dupa definirea unui caracter special, programul trebuie sa seteze adresa in DD RAM. Orice scriere si citire a datelor din memoria LCD este realizata de la ultima adresa care a fost setata, folosind instructiunea set-adress. Odata ce adresa DD RAM este setata, un caracter nou va fi afisat in locul potrivit pe ecran. Pana acum am discutat operatia de scriere si citire a memoriei unui LCD ca si cum ar fi o memorie obisnuita. Acest lucru nu este adevarat. Controlerul LCD are nevoie de 40 pana la 120 microsecunde (us) pentru scriere si citire. Alte operatii pot dura pana la 5 ms. In acest timp microcontrolerul nu poate accesa LCDul, astfel un program trebuie sa stie cand un LCD este ocupat. Putem rezolva aceasta in doua metode.
Fig.1.3.2
O metoda este verificarea bitului BUSY de pe linia de date D7. Aceasta nu este cea mai buna metoda pentru ca LCDul se poate bloca si programul va sta intr-o bucla infinita verificand bitul BUSY. O alta metoda este introducerea unei intarzieri in program. Intarzierea trebuie sa fie destul de lunga pentru ca LCDul sa termine operatia in desfasurare. Instructiunile pentru scriere si citire cu memoria LCDului sunt afisate mai sus. La inceput am mentionat ca avem nevoie de 11 linii I/O pentru a comunica cu un LCD. Oricum, putem comunica cu un LCD printr-un bus de 4 linii. Putem reduce numarul total de linii de comunicatie la 7. Schema pentru conectarea printr-un bus de 4 biti este in imaginea de mai jos. In acest exemplu folosim un afisaj LCD cu 2x16 caractere, denumit LM16x212 fabricat de producatorul japonez Sharp. Mesajul ,character' este scris pe prima linie urmat de doua caractere speciale ,~' si ,}'. Pe a doua linie este scris cuvantul ,mikroElektronika'.
Fig.1.3.3 Conectarea unui afisaj la un microcontroler
Metode de programare a microcontrolerului
Abilitatea de a comunica este de mare importanta in orice domeniu. Totusi, este posibila numai daca amandoi partenerii de comunicare cunosc acelasi limbaj, sau urmaresc aceleasi reguli in timpul comunicarii. Folosind aceste principii ca un punct de plecare, putem de asemenea defini comunicarea ce are loc intre microcontrolere si om. Limbajul pe care microcontrolerul si omul il folosesc pentru a comunica este numit 'limbaj de asamblare'. Titlul insusi nu are un inteles deosebit, si este analog numelor altor limbaje, de ex. engleza si franceza. Mai precis, 'limbajul de asamblare' este doar o solutie trecatoare. Programele scrise in limbaj de asamblare trebuie traduse intr-un 'limbaj de zero-uri si unu-uri' pentru ca un microcontroler sa-l inteleaga. 'Limbajul de asamblare' si 'assembler-ul' sau asamblorul sunt doua notiuni diferite. Primul reprezinta un set de reguli folosite in scrierea unui program pentru un microcontroler, iar celalalt este un program in computerul personal care traduce limbajul de asamblare intr-un limbaj de zero-uri si unu-uri. Un program ce este tradus in 'zero-uri' si 'unu-uri' este numit 'limbaj masina'.
Fig.1.3.4
Fizic, 'Program' reprezinta un fisier pe discul computerului (sau in memorie daca este citit intr-un microcontroler), si este scris conform cu regulile de asamblare sau ale altui limbaj pentru programarea microcontrolerului. Omul poate intelege pentru ca este constituit din semne si cuvinte ale alfabetului. Cand se scrie un program, trebuie urmarite unele reguli pentru a se obtine un efect dorit. Un Translator interpreteaza fiecare instructiune scrisa in limbajul de asamblare ca o serie de zero-uri si unu-uri ce au o semnificatie pentru logica interna a microcontrolerului.
Sa luam de exemplu instructiunea 'RETURN' pe care microcontrolerul o foloseste pentru a se intoarce dintr-un sub-program.
Cand asamblorul il traduce, obtinem o serie de zero-uri si unu-uri pe care microcontroleul stie cum sa-l interpreteze.
Exemplu RETURN 00 0000 0000 1000
Similar propozitiei de mai sus, fiecare instructiune de asamblare este interpretata ca si corespunzand unei serii de zero-uri si unu-uri.
Locul unde aceasta traducere a limbajului de asamblare se gaseste , se numeste un fisier de 'executie'. Vom intalni adesea numele de fisier 'HEX'. Acest nume vine de la o reprezentare hexazecimala a acelui fisier, ca si de la apendicele 'hex' din titlu, de ex. 'run through.hex'. Odata ce este generat, fisierul de executie este citit in microcontroler printr-un programator.
Limbaj de Asamblare
Elementele de baza ale limbajului de asamblare sunt:
Eticheta
Un Label este o desemnare textuala (in general un cuvant usor de citit) pentru o linie intr-un program, sau sectiunea unui program unde micro-ul poate sari - sau chiar inceputul unui set de linii a unui program. Poate fi folosit de asemenea pentru a executa ramificare de program (ca Goto...) si programul poate chiar avea o conditie ce trebuie indeplinita pentru ca instructiunea Goto sa fie executata. Este important pentru un label de a incepe cu o litera a alfabetului sau cu o subliniere '_'. Lungimea label-ului poate fi de pana la 32 caractere. Este de asemenea important ca un label sa inceapa de la primul rand.
Fig.1.3.5
Instructiuni
Instructiunile sunt deja definite prin folosirea unui microcontroler specific, asa ca ne ramane doar sa urmam instructiunile pentru folosirea lor in limbajul de asamblare. Modul in care scriem o instructiune mai este numit 'sintaxa' instructiunii. In exemplul urmator putem recunoaste o greseala in scriere pentru ca instructiunile movlp si goto nu exista pentru microcontrolerul PIC16F84.
Operanzi
Operanzii sunt elemente ale instructiunii pentru instructiunea ce este executata. Ei sunt de obicei registri sau variabile sau constante. Constantele sunt numite 'literal-e'. Cuvantul literal inseamna 'numar'.
Comentarii
Comentariul este o serie de cuvinte pe care programatorul le scrie pentru a face programul mai clar si mai usor de citit. Se plaseaza dupa o instructiune , si trebuie sa inceapa cu punct si virgula';'.
Directive
O directiva este similara unei instructiuni, dar spre deosebire de o instructiune este independenta de modelul microcontrolerului, si reprezinta o caracteristica a limbajului de asamblare insusi. Directivelor le sunt date uzual intelesuri de scop prin variabile si registri. De exemplu, LEVEL poate fi o desemnatie pentru o variabila in memoria RAM la adresa 0Dh. In felul acesta, variabila la acea adresa poate fi accesata prin desemnatia LEVEL. Aceasta este mult mai usor pentru un programator sa inteleaga decat sa incerce sa-si aduca aminte ca adresa 0Dh contine informatii despre LEVEL.
Cap. 2 Partea tehnica
2.1 Schema bloc
Schema bloc a L - metrului este formata din :
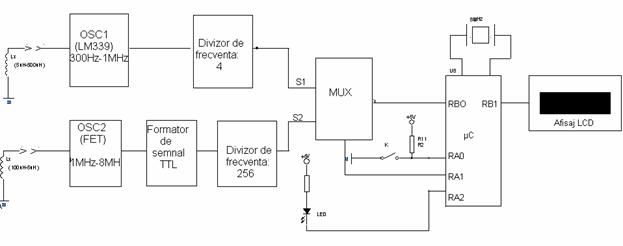
Fig. 2.1.1 Schema bloc a L-metrului
Principiul de masurare este prezentat in figura 2.2.2.
Acest bloc este format din :
-2 oscialtoare OSC1,OSC2 care au frecventa de oscilatie dependenta de
inductanta bobinei masurata dupa relatia L=![]()
un formator de semnal TTL (cu trigher smith) care preia semnalul generat de oscilatorul OSC2 si genereaza la iesire un semnal de nivel TTL. Pentru OSC1 nu este necesar un oscilator de semnal intrucat LM339 genereaza direct semnal TTL.
-2 divizoare de frecventa sunt de 4 respectiv 256 cu rolul de a micsora frecventa semnalului masurat astefel incat sa fie mult mai mica decat frecventa de functionare a picului astfel incat sa fie mult mai mare Tx>Tref
- un multiplexor care selecteaza in functie de semnalul RA1 ,unul din semnalele S1 sau S2
- un microcontroler care
are rolul de a detecta o perioada din semnalulu al carei frecventa se masoara pe
baza formulei L=![]() . Si comada afisajul LCD in
vederea afisarii valorii L.
. Si comada afisajul LCD in
vederea afisarii valorii L.
-un comutator K1 care permite schimabarea gamei de masura.LED-ul indicand in ce gama ne aflam.Daca LED-ul este aprins ne aflam in gama 100nH < L < 5 μH iar daca Led-ul este stins se masoara in gama
2.2 Blocul oscilator
Blocul oscilator de joasa frecventa LM339:
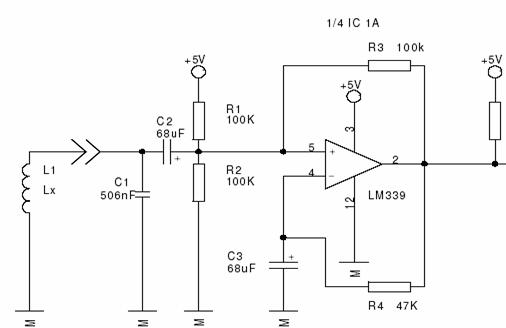
Fig.2.2.1
Lx,C1 impune frecventa de oscilatie a oscilatorului.
fx=![]()
 (2.2.1)
(2.2.1)
Rx-rezistenta serie a bobinei
Experimental s-a constat ca oscilatorul
functioneaza stabil daca Rx<5. ![]()
Condensatorul C2 este un
condensator de cuplaj al circuitului oscilant derivatie cu etajul comparator.Iar
R1 si R2 se aleg astfel incat intrarea neinversoare a
comaparatorului sa fie polarizata static la o valoare de ![]()
Valoarea lor trebuie sa suficient de mare pentru a nu amortiza curentul acordat derivatiei.
Din catalog R1-R2=100K![]()
Pentru a asigura un coeficient de variatie pozitiva mare adica un oscilator static alegem si R3=100K
Iesirea comparatorului este de tip open colector .
R5 se alege astfel incat curentul pe iesire sa fie
mic.Alegem I0=5mA iar R5=![]()
![]() =1K
=1K![]()
Pentru a functiona stabil constanta de
timp R4*C3>TX=![]()
Se alege R4=47 K![]() si stabilim
fX>500Hz de unde avem TX=
si stabilim
fX>500Hz de unde avem TX=![]() <
<![]() = Tmax
= Tmax
Alegem C3 astfel incat R4*C3=100*Tmax
de unde C3=![]()
Se alege la fel si C2 iar C1=506nF astfel incat oscilatorul sa functioneze stabil in gama 1μH<Lx<250mH
Blocul oscilator de inalta frecventa cu FET
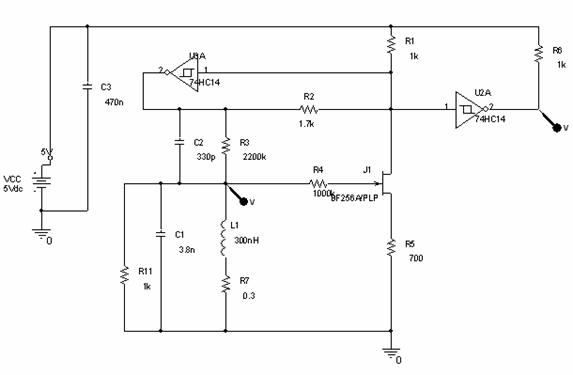
Fig.2.2.2
Schema bloc a unui oscilator este
Fig.2.2.3
Oscialtorul este un amplificator cu reactie pozitiva.
Conditia de oscilatie este ![]() x
x![]() =1 (2.2.2)
=1 (2.2.2)
1) conditia de
amplitudine: ![]() x
x![]() =1 (2.2.3)
=1 (2.2.3)
2)conditia de
faza: ![]() (2.2.4)
(2.2.4)
In schema
amplificatorul este un etaj de amplificare cu transistor FET cu sarcina
distributive.Reactia pozitiva este asigurata cu un amplificator cu inversor
CMOS.Amplificatorul ce introduce un defazaj de ![]() iar iar inversoru in defazaj de
iar iar inversoru in defazaj de ![]() deci
de 2
deci
de 2![]() si se indeplineste conditia de faza.
si se indeplineste conditia de faza.
Pentru a se indeplinii si conditia de amplitudine este necesar:
Poarta CMOS sa fie polarizata in zona tensiuni de tranzitieVT cu ajutorul unei rezistenta R5care se determina experimental R5=1.5K
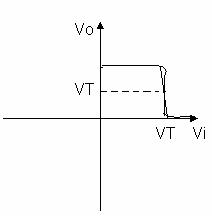
Fig.2.2.4 caracteristica de transfer a puntii CMOS
Polarizarea intrarii puntii CMOS aproape de VT =2.5V se realizeaza si prin reglajul rezistentei din schema FET.
Tranzistorul FET trebuie polarizat in regiunea de saturatie
Caracteristicile statice FET-ului sunt:
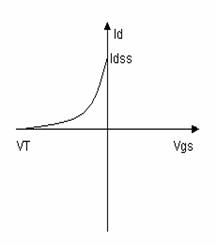
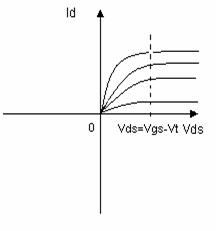
Fig.2.2.5 Fig.2.2.6
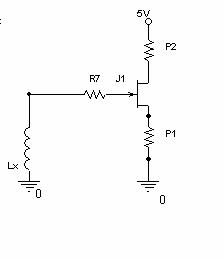
Fig.2.2.7
Id=ISS(1-![]() )2 0<VGS<VT (2.2.5)
)2 0<VGS<VT (2.2.5)
VGS=-IdxP2 (2.2.6)
Alegand un transistor FET BF256 cu VT=--3V si un curent Id=2mA se obtine P2=500 ohmi.
Si P1=4,7K care se regleaza astfel incat sa se indeplineasca conditia de amplitudine pentru a exista oscilatii.
Grupul R6siC4 se allege asfel incat impedanta cat mai putin decat a puntii Cmos sa influenteze cat mai putin Q (factorul de calitate) al circuitului acordat Lx,C5 si oscilatorul sa functioneze stabil.
Limitarea amplitudinii se face prin folosirea caracteristicii neliniare a tranzistorului cu efect de camp.
Rezultatele de simulare a acestei scheme in ORCAD sunt prezentate in fig..
Fig. 2.2.8 Rezultate de simulare pentru oscilatorul cu FET
2.3 Divizoarele de frecventa
Divizoarele de frecventa sunt realizate cu numaratoarele IC2, IC6 respectiv SN74LS393 . Schema interna a circuitului SN74LS393 este prezentata mai jos:
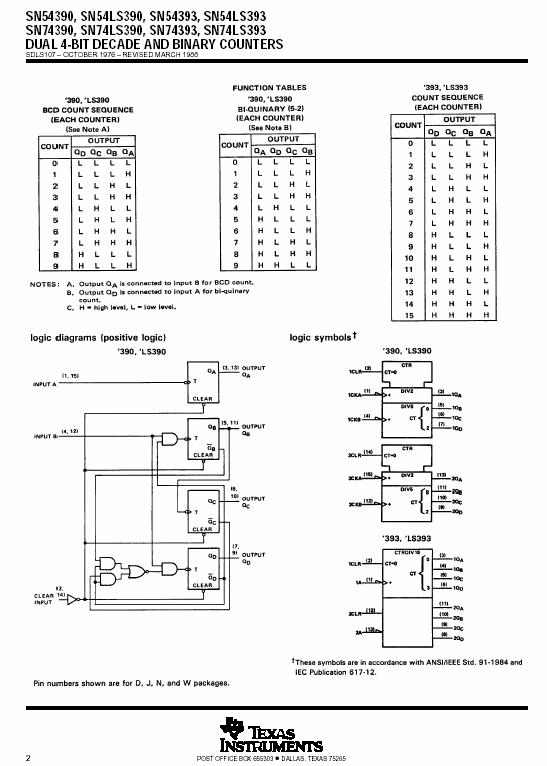
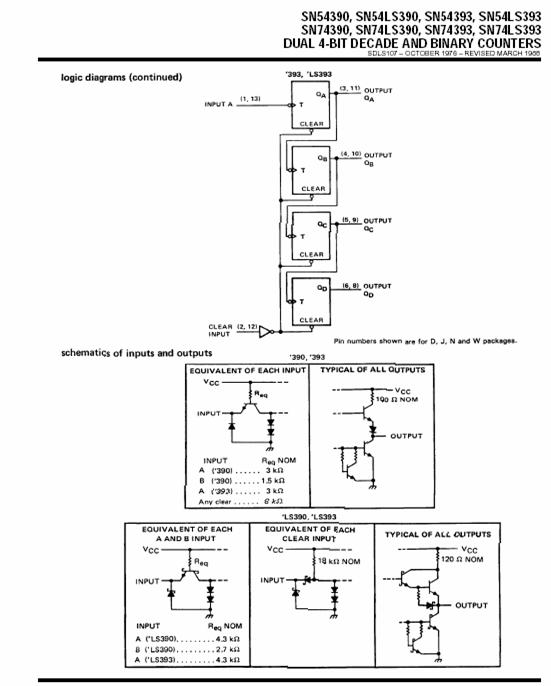
Fig.2.2.9 Shema interna a SN74LS393
Utilizarea divizoarelor de frecventa :IC2 este un divizor cu 4 respectiv IC6 divizor cu 256 sunt necesare pentru a micsora frecventa semnalului masurat.Durata unei instructiuni este de 0,5μs.Frecventa oscilatorului cu cuart care proiecteaza microcontrolerul este de 8Mhz .
Calculul frecventei de oscilatie
1.Cu oscilatorul de joasa frecventa(LM339)
f=![]() ; Kdiv=2 (2.2.7)
; Kdiv=2 (2.2.7)
2.Cu oscilatorul de inalta frecventa(FET)
f=![]() ; Kdiv=256 (2.2.8)
; Kdiv=256 (2.2.8)
2.4 Multiplexorul
Un dispozitiv care permite transferul unor fluxuri multiple de date printr-un mediu comun.
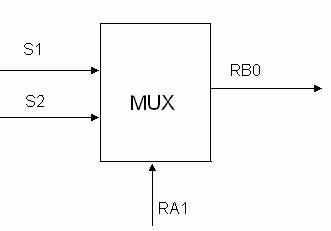
Fig.2.4.1
S1-semnalul generat de IC2 (pin4)
S2-semnalul generat de IC6 (pin8)
Tabelul de adevar asociat multiplexorului :
|
S1 |
S2 |
RA1 |
RB0 | |
|
X |
Selecteaza semnalul S1 |
|||
|
X | ||||
|
X |
Selecteaza semnalul S2 |
|||
|
X |
S1-semnalul generat de oscilatorul de joasa frecventa
S2-semnalul generat de oscilatorul de inalta frecventa
|
S1 S2 | ||
RB0=S1*![]() +S2*RA1
+S2*RA1
Se implementeaza cu circuite SI-NU cu 2 intrari :
RB0=![]()
RB0=![]()
2.5 PIC 16F84
Functiile microcontrolerului
K1 apasat:
RA0=0 -selecteaza gama de masura gama1:L = 100nH - 5μH;
K1 neapasat:
RA0=1 -se selecteaza gama de masura gama2:L=5μH - 500mH;
-LED aprins gama1
-LED stins gama2
Semnalul cu frecvente necunoscute Tx generat de oscilator este preluat la pinul RA0 de catre microcontrolerul care functioneaza in regim de intreruperi la pinul RB0 si la valori 0xFF a TMR0. Schema bloc echivalenta a uC este prezentata in figura..
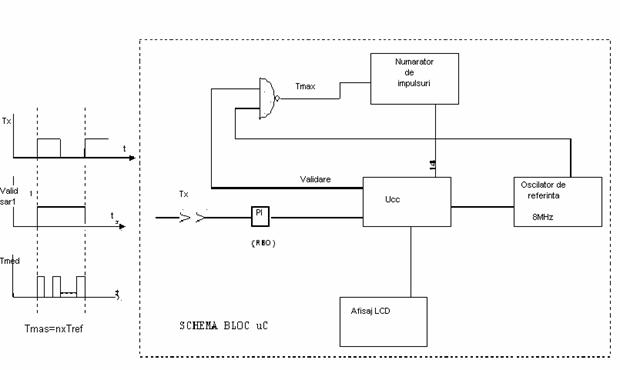
Fig.2.5.1
Calculul inductantei
f0=![]() *
*![]() =
=![]() (2.5.1)
(2.5.1)
daca RL <<1;
RL-rezistenta bobinei;
-Factorul de calitate al bobinei la freecventa de rezonanta
Q=![]() ; ω0=
; ω0=![]() (2.5.2)
(2.5.2)
Impedanta la frecventa de rezonanta
Z0=![]() =
=![]() =Q*L*
ω0=
=Q*L*
ω0=![]() (2.5.3)
(2.5.3)
Microcontrolerul calculeaza frecventa in 2 moduri in functie de oscilator.
1.Pentru oscilatorul de joasa frecventa(LM339)
Tx=2π![]() →
Lx=
→
Lx=![]() =
=![]() *(
*(![]() )2 (2.5.4)
)2 (2.5.4)
Tx=n*TRef ; n-numarul de impulsuri masurate de microcontroler
TRef=1μs
Notam ![]() cu K
cu K
Alegand C=506nF (470nF+33nF)
K=200239,4934=2,00239493*105(F-1)
Lx=K (![]() )2=K*(
)2=K*(![]() )2=K*10-12(
)2=K*10-12(![]() )2 (2.5.5)
)2 (2.5.5)
Lx=2*105*10-12*(![]() )2; (2.5.6) Lx=
)2; (2.5.6) Lx=![]() *10-7[H] (2.5.7)
*10-7[H] (2.5.7)
In registrele TMRO, NUMB; NUMB2 se
gaseste numarul (![]() )in
forma binara.
)in
forma binara.
Kdiv=4 deoarece este dat de divizorul de frecventa
Microcontrolerul calculeaza ![]() iar de coeficientul 10-7 se
tine cont cand face afisarea.
iar de coeficientul 10-7 se
tine cont cand face afisarea.
2.Pentru oscilatorul de joasa frecventa
Lx=![]() *(
*(![]() )2=
)2=![]() (2.5.8)
(2.5.8)
TRef=1μs
Kdiv=256 deoarece este dat de divizorul cu 256
Lx=m*10-12*n2 (2.5.9)
Se alege condensatorul astfel incat m sa fie numar intreg.
-pentru m=100 se determina C=![]() (2.5.9)
(2.5.9)
C=3,865*10-9F=3.865 nF
Lx=m*10-2*n2=10-10*n2 (2.5.10)
Lx=10-10*n2 ; (2.5.11)
Microcontrolerul calculeaza n2 iar de coeficientul 10-10 se tine cont cand se face afisarea.
2.6 Initializare LCD
Schema logica a subrutinei de initializare a LCD-ului este

![]()
Fig.2.6.1
|
LCD |
D777 |
D6666 |
D5 |
D4 |
En |
R/W |
RS | |||
|
P2 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
Wait_15ms |
||
|
0 |
0 |
1 |
1 |
0 |
0 |
0 |
0x3000 |
|||
|
0 |
0 |
1 |
1 |
0 |
0 |
0 |
Enable |
|||
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
||||
|
wait |
wait 5ms |
|||||||||
|
0 |
0 |
1 |
1 |
0 |
0 |
0 |
0x30 |
|||
|
0 |
0 |
1 |
1 |
1 |
0 |
0 |
Enable |
|||
|
wait |
||||||||||
|
0 |
0 |
1 |
1 |
0 |
0 |
0 |
||||
|
wait |
||||||||||
|
0 |
0 |
1 |
1 |
0 |
0 |
0 |
0x30 |
|||
|
0 |
0 |
1 |
1 |
1 |
0 |
0 |
Enable |
|||
|
wait |
||||||||||
|
0 |
0 |
1 |
1 |
0 |
0 |
0 |
||||
|
wait |
||||||||||
|
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0x20 |
|||
|
0 |
0 |
1 |
0 |
1 |
0 |
0 |
Enable |
|||
|
wait |
||||||||||
|
0 |
0 |
1 |
0 |
0 |
0 |
0 |
||||
|
wait |
||||||||||
|
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0x20 |
|||
|
0 |
0 |
1 |
0 |
1 |
0 |
0 |
Enable |
|||
|
wait |
||||||||||
|
0 |
0 |
1 |
0 |
0 |
0 |
0 |
||||
|
wait |
||||||||||
|
1 |
1 |
0 |
0 |
0 |
0 |
0 |
0xC0 |
|||
|
wait | ||||||||||
|
1 |
1 |
0 |
0 |
0 |
0 |
0 |
Enable |
|||
|
1 |
1 |
0 |
0 |
1 |
0 |
0 |
||||
|
wait |
||||||||||
|
1 |
1 |
0 |
0 |
0 |
0 |
0 |
||||
|
wait |
||||||||||
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0x00 |
|||
|
0 |
0 |
0 |
0 |
1 |
0 |
0 |
Enable |
|||
|
wait |
||||||||||
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
||||
|
wait |
||||||||||
|
1 |
1 |
0 |
1 |
0 |
0 |
0 |
0xD0 |
|||
|
1 |
1 |
0 |
1 |
1 |
0 |
0 |
Enable |
|||
|
wait |
||||||||||
|
1 |
1 |
0 |
1 |
0 |
0 |
0 |
||||
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0x00 |
|||
|
0 |
0 |
0 |
0 |
1 |
0 |
0 |
Enable |
|||
|
wait |
||||||||||
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
||||
|
wait |
||||||||||
|
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0x40 |
|||
|
0 |
0 |
0 |
1 |
1 |
0 |
0 |
Enable |
|||
|
wait |
||||||||||
|
0 |
0 |
0 |
1 |
0 |
0 |
0 |
||||
|
wait |
||||||||||
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0x00 |
|||
|
0 |
0 |
0 |
0 |
1 |
0 |
0 |
Enable |
|||
|
wait |
||||||||||
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
||||
|
wait |
||||||||||
|
0 |
1 |
1 |
0 |
0 |
0 |
0 |
0X60 |
|||
|
0 |
1 |
1 |
0 |
1 |
0 |
0 |
Enable |
|||
|
wait |
||||||||||
|
0 |
1 |
1 |
0 |
0 |
0 |
0 |
||||
|
wait |
||||||||||
Fig.2.6.2
2.7 Schema logica a programului
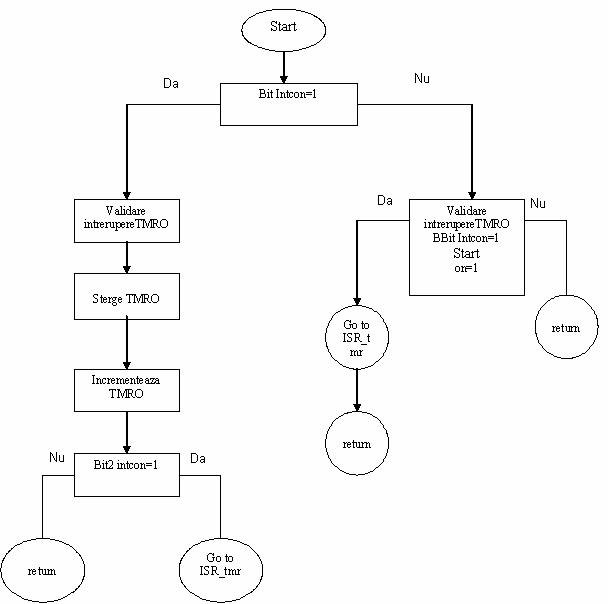
Fig.2.7.1
Organigrama Programului PIC
Fig.2.7.2
Subrutina de calcul a frecventei
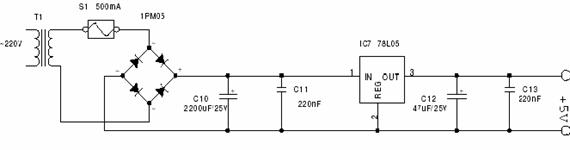
2.8 Sursa de alimentare
Schema electrica a sursei de alimentare
Pentru calculul transformatorului de retea se porneste de la marimile electrice,care se presupun cunoscute:
Up=220V
US=9V
IS=1A
Puterea din secundar se calculeaza astfel:
PS=US*IS
PS=9V*1A de unde PS=9VA
Puterea din primarul transformatorului este
PP=PS/n
PP=9VA/0.85
PP=10.6VA
Curentul din primar:
IP=PP/UP
IP=10.6/220
IP=50mA
Sectiunea miezului transformatorului este
S2=1.22* PP
S2=1.44*10.6
S2=4cm2
Se alege tipul de tole determinand parametrul a:
a2=4.72*S
a2=22.09*4
a=10mm
Grosimea pachetului de tole:
h=50*S/a
h=50*4/10
h=20mm
Numarul de spire pe volt:
n0=45/S
n0=11.24sp/V
Numarul de spire al infasurarilor transformatorului:
NP= n0*Up NP=2473sp
NS= n0*US NS=102sp
Diametrul conductoarelor transformatorului :
d2p=0.712*IP d2p=0.5*0.05 dp=0.15mm
d2s=0.712*IS d2S=0.5*1 dS=0.7mm
Deci primarul va avea 2473 spire cu sarma de Cu de 0.15mm,iar secundarul va avea 102 spire cu sarma de Cu de 0.7mm,bobinajul realizaduse pe o carcasa cu sectiunea de 4 cm2.
Redresorul si filtrul
Redresarea tensiunii alternative data de transformator este facuta cu ajutorul puntii redresoare PR.Filtrul capacitiv realizat cu condensatorul C1,realizeaza aplatizarea riplului dat de PR.Fiultrul de C2,C3 si R1 este necesar pentru stabilirea functionarii circuitului LM7805.
Stabilizatorul ULN 7805
In general alimentarea corecta este de o importanta maxima pentru functionarea corecta a sistemului cu microcontroller.Poate fi usor comparata cu respiratia unui om in aer.Este mai probabil ca un om care respire aer curat va trai mai mult decat un om care locuieste intr-un mediu poluat.Pentru o functionare corecta a oricarui microcontroller este necesar sa oferim o sursa stabile de alimentare.Conform specificatiilor tehnice oferite de producatorul microcontrolerului PIC,tensiune de alimentare ar trebui sa se incadreze intre 2V si 6V pentru toate versiunile.Cea mai simpla solutie este folosirea stabilizatorului de tensiune LM7805 care ofera tensiunea stabile de +5V la iesire.
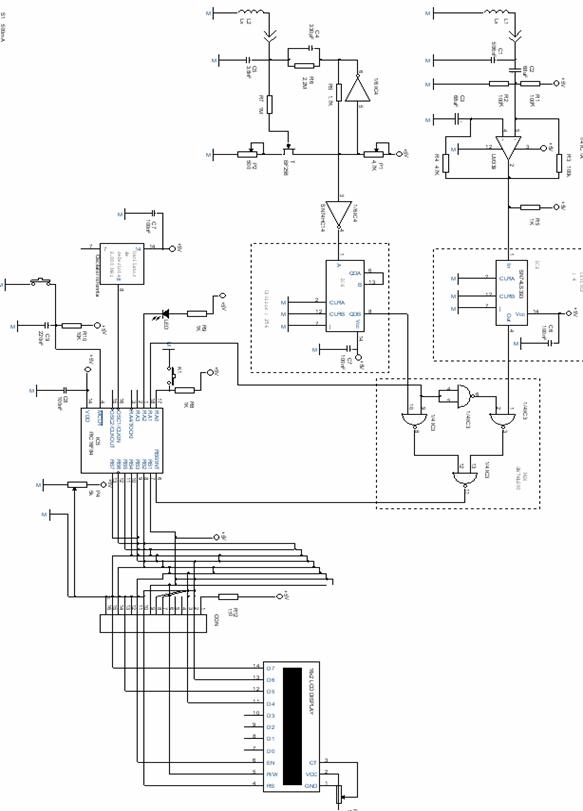
A1 Schema electronica a L-metrului
A.2.Lista de componente
C1 500mF
C2,C3 68μF
R1,R2 100K
R3 100K
R4 47K
LM339
C6 100nF
SN74LS393
R5 1,7K
R6 2,2M
C4 330pF
C5 3,8nF
R7 1M
P1 4,7K
BF256
P2 500
SN74HC14
C7 100nF
R9 1K
LED
R8 1K
R10 10K
C8 100nF
C9 220nF
P4 5K
R12 110
P3 1K
ULN7805
LCD 2X16 Display
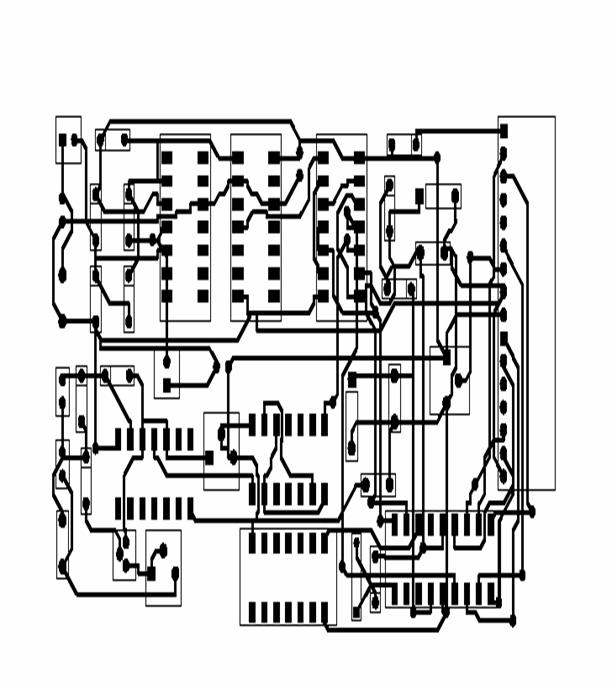
A.3 Cablajul
A.4.Listingul programului in limbaj de asamblare
list p=16F84A
radix hex
PORTA equ 0x05
PORTB equ 0x06
TRISA equ 0x85
TRISB equ 0x86
TMR0 equ 0x01
STATUS equ 0x03
OPTIONS equ 0x81
INTCON equ 0x0B
W_temp equ 0x17
STATUS_temp equ 0x18
COUNT1 equ 0x1A
COUNT2 equ 0x1B
LCD equ 0x1C
COUNT equ 0x0C
INDICE equ 0x19
NUMB1 equ 0x20
NUMB2 equ 0x21
NUMB3 equ 0x22
NUMB4 equ 0x23
NUMZ1 equ 0x24
NUMZ2 equ 0x25
NUMZ3 equ 0x26
NUMZ4 equ 0x27
CARRY equ 0x28
CARRY1 equ 0x29
CARRY2 equ 0x2A
CARRY3 equ 0x2B
CARRY4 equ 0x2C
NRBITI equ 0x2D
CARRY12 equ 0x2E
CARRY13 equ 0x2F
CARRY14 equ 0x30
ACCaLO equ 0x31
ACCaHI equ 0x32
ACCbLO equ 0x33
ACCbHI equ 0x34
ACCcLO equ 0x35
ACCcHI equ 0x36
ACCdLO equ 0x37
ACCdHI equ 0x38
temp equ 0x39
;sign equ 0x3A
#define RS PORTB,1
#define RW PORTB,2
#define EN PORTB,3
org 0x000
goto main
ISR_adr org 0x04
;bcf PORTA,3;-------
;clrf TMR0
btfsc INTCON,7
goto ISR_adr
;call PUSH
btfsc INTCON,1
goto ISR_rb0
btfsc INTCON,2
goto ISR_tmr
main
clrwdt
bsf STATUS,5
movlw b'00000000'
movwf OPTIONS
movlw 0x01 ;--
movwf TRISB
movlw 0x19
movwf TRISA
bcf STATUS,5
clrf PORTA
;clrf PORTB
clrf NUMB1
clrf NUMB2
clrf NUMB3
clrf NUMB4
call init_lcd
call stergere
call scrie_proiect
call stergere
call scrie_mesaj
;-- valdeaza intrerupere RB0
;bcf INTCON,2
bcf INTCON,1
bsf INTCON,4
bcf INTCON,3
bcf INTCON,5
clrf INDICE
bsf INTCON,7
loop ;call init_lcd
;call scrie_mesaj
goto loop
;goto main
ISR_rb0
btfsc INDICE,0
goto rb01
clrf TMR0
bcf INTCON,1
bcf INTCON,2
bsf INTCON,5
bsf INDICE,0
retfie
rb01 movf TMR0,0
movwf NUMB1
bcf INTCON,7
;movf TMR0,0
;movwf NUMB1
;bcf INTCON,7
;--conversie, calcule, afisare
call init_lcd
;call scrie_mesaj
call stergere
call poz_cursor
;movf NUMB4,0
;call afis_nibble_sup
;movf NUMB4,0
;call afis_nibble_inf
;movf NUMB3,0
;call afis_nibble_sup
;movf NUMB3,0
;call afis_nibble_inf
;movf NUMB2,0
;call afis_nibble_sup
;movf NUMB2,0
;call afis_nibble_inf
;movf NUMB1,0
;call afis_nibble_sup
;movf NUMB1,0
;call afis_nibble_inf
;call delay_1s
;call delay_1s
;call delay_1s
;call delay_1s
;call delay_1s
;call delay_1s
;call delay_1s
;call delay_1s
;clrf NUMB4
;clrf NUMB3
; calculeaza NxN
movf NUMB2,0
movwf ACCbHI
movf NUMB1,0
movwf ACCbLO
call multiply
call div_cu_doi2
call div_cu_doi2
call div_cu_doi2
call stergere
call poz_cursor
call conbinbcd
movf NUMZ4,0
call afis_nibble_sup
movf NUMZ4,0
call afis_nibble_inf
movf NUMZ3,0
call afis_nibble_sup
movf NUMZ3,0
call afis_nibble_inf
movf NUMZ2,0
call afis_nibble_sup
movf NUMZ2,0
call afis_nibble_inf
movf NUMZ1,0
call afis_nibble_sup
movf NUMZ1,0
call afis_nibble_inf
call delay_1s
call delay_1s
call delay_1s
call delay_1s
;call delay_1s
;call delay_1s
;call delay_1s
;call delay_1s
;goto loop
; afiseaza rezultatul
call stergere
call poz_cursor
movlw 'L'
call afisare
movlw '='
call afisare
movf NUMZ4,0
bcf STATUS,2
andlw 0xF0
btfss STATUS,2
goto eror
movf NUMZ4,0
bcf STATUS,2
andlw 0x0F
btfss STATUS,2
;goto teo1
goto sute_mH
movf NUMZ3,0
bcf STATUS,2
andlw 0xF0
btfss STATUS,2
;goto teo2
goto zeci_mH
movf NUMZ3,0
bcf STATUS,2
andlw 0x0F
btfss STATUS,2
;goto teo3
goto unit_mH
movf NUMZ2,0
bcf STATUS,2
andlw 0xF0
btfss STATUS,2
;goto teo3
goto sute_uH
movf NUMZ2,0
bcf STATUS,2
andlw 0x0F
btfss STATUS,2
;goto teo3
goto zeci_uH
goto unit_uH
eror
call poz_cursor
movlw 'E'
call afisare
movlw 'r'
call afisare
movlw 'o'
call afisare
movlw 'a'
call afisare
movlw 'r'
call afisare
movlw 'e'
call afisare
goto teo
sute_mH
movf NUMZ4,0
call afis_nibble_inf
movf NUMZ3,0
call afis_nibble_sup
movf NUMZ3,0
call afis_nibble_inf
movlw '.'
call afisare
movf NUMZ2,0
call afis_nibble_sup
movlw 'm'
call afisare
movlw 'H'
call afisare
goto teo
zeci_mH
movf NUMZ3,0
call afis_nibble_sup
movf NUMZ3,0
call afis_nibble_inf
movlw '.'
call afisare
movf NUMZ2,0
call afis_nibble_sup
movlw 'm'
call afisare
movlw 'H'
call afisare
goto teo
unit_mH
movf NUMZ3,0
call afis_nibble_inf
movlw '.'
call afisare
movf NUMZ2,0
call afis_nibble_sup
movf NUMZ2,0
call afis_nibble_inf
movlw 'm'
call afisare
movlw 'H'
call afisare
goto teo
sute_uH
movf NUMZ2,0
call afis_nibble_sup
movf NUMZ2,0
call afis_nibble_inf
movf NUMZ1,0
call afis_nibble_sup
movlw '.'
call afisare
movf NUMZ1,0
call afis_nibble_inf
movlw 'u'
call afisare
movlw 'H'
call afisare
goto teo
zeci_uH
movf NUMZ2,0
call afis_nibble_inf
movf NUMZ1,0
call afis_nibble_sup
movlw '.'
call afisare
movf NUMZ1,0
call afis_nibble_inf
movlw 'u'
call afisare
movlw 'H'
call afisare
goto teo
unit_uH
movf NUMZ1,0
call afis_nibble_sup
movlw '.'
call afisare
movf NUMZ1,0
call afis_nibble_inf
movlw 'u'
call afisare
movlw 'H'
call afisare
teo call delay_1s
call delay_1s
call delay_1s
;call delay_1s
;call delay_1s
;call delay_1s
call sterge_reg
call stergere
call scrie_mesaj
bcf INDICE,0
;-- valideaza intreruperile
clrf TMR0
bcf INTCON,1
bcf INTCON,5
bsf INTCON,4
;bsf INTCON,7
retfie
;goto loop
ISR_tmr ;bsf INTCON,7
incf NUMB2,1
btfss STATUS,2
goto iesire
;bcf STATUS,2
incf NUMB3,1
btfss STATUS,2
goto iesire
;bcf STATUS,2
incf NUMB4,1
;btfss STATUS,2
;goto iesire
;incf NUM5
iesire bcf INTCON,2
bsf INTCON,5
;call POP
;bsf PORTA,3;-----
;call POP
retfie
sterge_reg
clrf NUMB1
clrf NUMB2
clrf NUMB3
clrf NUMB4
return
stergere
bcf RS
bcf RW
movlw 0x00
movwf PORTB
call enable
movlw 0x10
movwf PORTB
call enable
call delay_15m
;8Meg
;call delay_15m
return
D_add
bcf STATUS,0
movf ACCaLO,0
addwf ACCbLO,1
btfsc STATUS,0
incf ACCbHI,1
btfsc STATUS,0
bsf STATUS,0
movf ACCaHI,0
addwf ACCbHI,1
btfsc STATUS,0
bsf STATUS,0
retlw 0
multiply
movf NUMB2,0
movwf ACCaHI
movf NUMB1,0
movwf ACCaLO
call setup
mloop rrf ACCdHI,1
rrf ACCdLO,1
btfsc STATUS,0
call D_add
rrf ACCbHI,1
rrf ACCbLO,1
rrf ACCcHI,1
rrf ACCcLO,1
decfsz temp,1
goto mloop
movf ACCbHI,0
movwf NUMB4
movf ACCbLO,0
movwf NUMB3
movf ACCcHI,0
movwf NUMB2
movf ACCcLO,0
movwf NUMB1
return
setup
movlw .16
movwf temp
movf ACCbHI,0
movwf ACCdHI
movf ACCbLO,0
movwf ACCdLO
clrf ACCbHI
clrf ACCbLO
retlw 0
inm_cu_doi2; impartirea cu doi a unui numar in baza 2
bcf STATUS,0
rlf NUMB1,1
rlf NUMB2,1
rlf NUMB3,1
rlf NUMB4,1
return
div_cu_doi2; impartirea cu doi a unui numar in baza 2
bcf STATUS,0
rrf NUMB4,1
rrf NUMB3,1
rrf NUMB2,1
rrf NUMB1,1
return
init_lcd
call delay_1s
bcf RS
bcf RW
movlw 0x30
movwf PORTB
call enable
call delay_15m
;8Meg
;call delay_125m
call enable
;call delay_125m
call delay_1.5m
call enable;
movlw 0x20
movwf PORTB
call enable
call enable;
bcf RS
bcf RW
movlw 0xC0
movwf PORTB
call enable
movlw 0x00
movwf PORTB
call enable
movlw 0xC0
movwf PORTB
call enable
movlw 0x00
movwf PORTB
call enable
movlw 0x10
movwf PORTB
call enable
movlw 0x00
movwf PORTB
call enable
bcf RS
bcf RW
movlw 0x60
movwf PORTB
call enable
movlw 0x00
movwf PORTB
call enable;
bcf RS
bcf RW
movlw 0xF0
movwf PORTB
call enable
call delay_15m
;8Meg
;call delay_125m
return
scrie_proiect
call poz_cursor
movlw 'P'
call afisare
movlw 'r
call afisare
movlw 'o'
call afisare
movlw 'i'
call afisare
movlw 'e'
call afisare
movlw 'c'
call afisare
movlw 't'
call afisare
movlw ' '
call afisare
movlw 'd'
call afisare
movlw 'e'
call afisare
call poz_lin_2
movlw 'd'
call afisare
movlw 'e'
call afisare
movlw ' '
call afisare
movlw 's'
call afisare
movlw 't
call afisare
movlw 'a'
call afisare
movlw 't
call afisare
call delay_1s
call delay_1s
call delay_1s
call delay_1s
call delay_1s
return
poz_cursor
bcf RS
bcf RW
movlw 0x00
movwf PORTB
call enable
movlw 0x10
movwf PORTB
call enable
call delay_15m
;8Meg
;call delay_15m
bcf RS
bcf RW
movlw 0x80
movwf PORTB
call enable
movlw 0x30
movwf PORTB
call enable
call delay_15m
;8Meg
;call delay_15m
return
poz_lin_2
movlw 0xC0
movwf PORTB
call enable
movlw 0x30
movwf PORTB
call enable
call delay_15m
return
scrie_mesaj
;scrie M
bcf RS
bcf RW
movlw 0x00
movwf PORTB
call enable
movlw 0x10
movwf PORTB
call enable
call delay_15m
;8Meg
;call delay_15m
bcf RS
bcf RW
movlw 0x80
movwf PORTB
call enable
movlw 0x30
movwf PORTB
call enable
call delay_15m
movlw 'C'
call afisare
movlw 'o'
call afisare
movlw 'n'
call afisare
movlw 'e'
call afisare
movlw 'c'
call afisare
movlw 't'
call afisare
movlw 'a'
call afisare
movlw 't'
call afisare
movlw 'i'
call afisare
call poz_lin_2
movlw 'i'
call afisare
movlw 'n'
call afisare
movlw 'd'
call afisare
movlw 'u'
call afisare
movlw 'c'
call afisare
movlw 't'
call afisare
movlw 'a'
call afisare
movlw 'n'
call afisare
movlw 't'
call afisare
movlw 'a'
call afisare
return
;goto main
afisare
movwf LCD
movlw 0xF0
andwf LCD,0
addlw 0x02
movwf PORTB
call enable
swapf LCD,1
movlw 0xF0
andwf LCD,0
addlw 0x02
movwf PORTB
call enable
call delay_15m
;8Meg
;call delay_15m
return
afis_nibble_inf
;movf NUMB1,0
movwf LCD
movlw 0x0F
andwf LCD,1
movlw 0x30
addwf LCD,0
call afisare
return
afis_nibble_sup
movwf LCD
swapf LCD,1
movlw 0x0F
andwf LCD,1
movlw 0x30
addwf LCD,0
call afisare
return
enable
bsf EN
bcf EN
nop
nop
; nop
; nop
; nop
; nop
;-- 8Mhz
call delay_1125
nop
;nop
; nop
; nop
; nop
; nop
;nop
;nop
; nop
; nop
; nop
; nop
return
delay_15m; nu realizeaza i intarziere de 15200us
movlw 0x04
movwf COUNT
loop15 decfsz COUNT,1
goto loop115
goto exit15
loop115 call delay_1.5m
goto loop15
exit15 call delay_1.5m
return
delay_1.5m ; intarzierea = 3 x count1 +3 x count2 +12
; cu call si return
; intarzierea este 1.5ms
nop
nop
nop
nop
nop
nop
movlw 0xFF
movwf COUNT1
movlw 0xFF
movwf COUNT2
loop1.5 decfsz COUNT1,1
goto loop1.5
loop21.5 decfsz COUNT2,1
goto loop21.5
return
delay_1s; la 4Mhz
call delay_125m
call delay_125m
call delay_125m
call delay_125m
call delay_125m
call delay_125m
call delay_125m
call delay_125m
return
delay_125m; realizeaza o intarziere de 125ms
movlw 0xFA
movwf COUNT
loop125 decfsz COUNT,1
goto loop1125
goto exit125
loop1125 call delay_1125
goto loop125
exit125 call delay_1125
return
delay_1125
nop
nop
nop;--
nop
nop
nop
nop
nop
nop
movlw 0x51
movwf COUNT1
movlw 0x4F
movwf COUNT2
loop11125 decfsz COUNT1,1
goto loop11125
loop21125 decfsz COUNT2,1
goto loop21125
return
conbinbcd
clrf NUMZ1
clrf NUMZ2
clrf NUMZ3
clrf NUMZ4
movlw 0x21
movwf NRBITI
bucla1 decfsz NRBITI,1
goto bucla2
goto bucla3
bucla2 call rotleft
call bcd_ori_doi
goto bucla1
bucla3 return
rotleft
bcf STATUS,0
rlf NUMB1,1
rlf NUMB2,1
rlf NUMB3,1
rlf NUMB4,1
movf STATUS,0
movwf CARRY
movlw 0x01
andwf CARRY
return
bcd_ori_doi;inmultirea cu 2 a unui numar de la 09
bcf STATUS,0
bcf STATUS,1
clrf CARRY1
clrf CARRY12
clrf CARRY13
clrf CARRY14
clrf CARRY2
clrf CARRY3
clrf CARRY4
movf NUMZ1,0
addwf NUMZ1,1
btfss STATUS,0
goto doi1
movlw 0x01
movwf CARRY1
doi1 btfss STATUS,1
goto doi2
bcf STATUS,0
movlw 0x06
addwf NUMZ1,1
goto doi3
doi2 bcf STATUS,0
bcf STATUS,1
movlw 0x0A
subwf NUMZ1,0
btfss STATUS,1
goto doi3
;goto doi52
movlw 0x06
addwf NUMZ1,1
doi3 btfss CARRY1,0
goto doi5
doi6 bcf STATUS,0
bcf STATUS,1
movlw 0x60
addwf NUMZ1,1
btfss STATUS,0
goto doi7
bsf CARRY1,0
goto doi7
doi5 movlw 0xA0
subwf NUMZ1,0
btfss STATUS,0
goto doi7
goto doi6
doi7 movf NUMZ2,0
addwf NUMZ2,1
btfss STATUS,0
goto doi8
movlw 0x01
movwf CARRY2
doi8 btfss STATUS,1
goto doi9
bcf STATUS,0
movlw 0x06
addwf NUMZ2,1
goto doi10
doi9 bcf STATUS,0
bcf STATUS,1
movlw 0x0A
subwf NUMZ2,0
btfss STATUS,1
goto doi10
;goto doi52
movlw 0x06
addwf NUMZ2,1
doi10 btfss CARRY2,0
goto doi11
doi12 bcf STATUS,0
bcf STATUS,1
movlw 0x60
addwf NUMZ2,1
btfss STATUS,0
goto doi13
bsf CARRY2,0
goto doi13
doi11 movlw 0xA0
subwf NUMZ2,0
btfss STATUS,0
goto doi13
goto doi12
doi13 movf CARRY1,0
addwf NUMZ2,1
btfss STATUS,0
goto doi14
movlw 0x01
movwf CARRY12
doi14 btfss STATUS,1
goto doi15
bcf STATUS,0
movlw 0x06
addwf NUMZ2,1
goto doi16
doi15 bcf STATUS,0
bcf STATUS,1
movlw 0x0A
subwf NUMZ2,0
btfss STATUS,1
goto doi16
;goto doi52
movlw 0x06
addwf NUMZ2,1
doi16 btfss CARRY12,0
goto doi17
doi18 bcf STATUS,0
bcf STATUS,1
movlw 0x60
addwf NUMZ2,1
btfss STATUS,0
goto doi19
bsf CARRY12,0
goto doi19
doi17 movlw 0xA0
subwf NUMZ2,0
btfss STATUS,0
goto doi19
goto doi18
doi19 movf CARRY12,0
addwf CARRY2,1
movf NUMZ3,0
addwf NUMZ3,1
btfss STATUS,0
goto doi20
movlw 0x01
movwf CARRY3
doi20
btfss STATUS,1
goto doi21
bcf STATUS,0
movlw 0x06
addwf NUMZ3,1
goto doi22
doi21 bcf STATUS,0
bcf STATUS,1
movlw 0x0A
subwf NUMZ3,0
btfss STATUS,1
goto doi22
;goto doi52
movlw 0x06
addwf NUMZ3,1
doi22 btfss CARRY3,0
goto doi23
doi24 bcf STATUS,0
bcf STATUS,1
movlw 0x60
addwf NUMZ3,1
btfss STATUS,0
goto doi25
bsf CARRY3,0
goto doi25
doi23 movlw 0xA0
subwf NUMZ3,0
btfss STATUS,0
goto doi25
goto doi24
doi25 movf CARRY2,0
addwf NUMZ3,1
btfss STATUS,0
goto doi26
movlw 0x01
movwf CARRY13
doi26 btfss STATUS,1
goto doi27
bcf STATUS,0
movlw 0x06
addwf NUMZ3,1
goto doi28
doi27 bcf STATUS,0
bcf STATUS,1
movlw 0x0A
subwf NUMZ3,0
btfss STATUS,1
goto doi28
;goto doi52
movlw 0x06
addwf NUMZ3,1
doi28 btfss CARRY13,0
goto doi29
doi30 bcf STATUS,0
bcf STATUS,1
movlw 0x60
addwf NUMZ3,1
btfss STATUS,0
goto doi31
bsf CARRY13,0
goto doi31
doi29 movlw 0xA0
subwf NUMZ3,0
btfss STATUS,0
goto doi31
goto doi30
doi31 movf CARRY13,0
addwf CARRY3,1
movf NUMZ4,0
addwf NUMZ4,1
btfss STATUS,0
goto doi32
movlw 0x01
movwf CARRY4
doi32
btfss STATUS,1
goto doi33
bcf STATUS,0
movlw 0x06
addwf NUMZ4,1
goto doi34
doi33 bcf STATUS,0
bcf STATUS,1
movlw 0x0A
subwf NUMZ4,0
btfss STATUS,1
goto doi34
;goto doi52
movlw 0x06
addwf NUMZ4,1
doi34 btfss CARRY4,0
goto doi35
doi36 bcf STATUS,0
bcf STATUS,1
movlw 0x60
addwf NUMZ4,1
btfss STATUS,0
goto doi37
bsf CARRY4,0
goto doi37
doi35 movlw 0xA0
subwf NUMZ4,0
btfss STATUS,0
goto doi37
goto doi36
doi37 movf CARRY3,0
addwf NUMZ4,1
btfss STATUS,0
goto doi38
movlw 0x01
movwf CARRY14
doi38 btfss STATUS,1
goto doi39
bcf STATUS,0
movlw 0x06
addwf NUMZ4,1
goto doi40
doi39 bcf STATUS,0
bcf STATUS,1
movlw 0x0A
subwf NUMZ4,0
btfss STATUS,1
goto doi40
;goto doi52
movlw 0x06
addwf NUMZ3,1
doi40 btfss CARRY14,0
goto doi41
doi42 bcf STATUS,0
bcf STATUS,1
movlw 0x60
addwf NUMZ4,1
btfss STATUS,0
goto doi43
bsf CARRY14,0
goto doi43
doi41 movlw 0xA0
subwf NUMZ4,0
btfss STATUS,0
goto doi43
goto doi42
doi43 movf CARRY14,0
addwf CARRY4,1
doi45 btfss CARRY4,0
goto doi46
movlw 0x99
movwf NUMZ1
movwf NUMZ2
movwf NUMZ3
movwf NUMZ4
goto doi47
;return
doi46 btfss CARRY,0
goto doi47
call addbcd_1
doi47 return
addbcd_1; aduna cu 1 in cod BCD
bcf STATUS,1
movlw 0x01
addwf NUMZ1,1
movlw 0x0A
subwf NUMZ1,0
btfss STATUS,1
goto star
bcf STATUS,0
bcf STATUS,1
movlw 0x06
addwf NUMZ1,1
;movlw 0x10
;addwf NUMZ1,1
movlw 0xA0
subwf NUMZ1,0
btfss STATUS,0
goto star
bcf STATUS,0
bcf STATUS,1
movlw 0x60
addwf NUMZ1,1
movlw 0x00
subwf NUMZ1,0
btfss STATUS,0
goto star
movlw 0x01
addwf NUMZ2,1
movlw 0x0A
subwf NUMZ2,0
btfss STATUS,1
goto star
bcf STATUS,0
bcf STATUS,1
movlw 0x06
addwf NUMZ2,1
;movlw 0x10
;addwf NUMZ1,1
movlw 0xA0
subwf NUMZ2,0
btfss STATUS,0
goto star
bcf STATUS,0
bcf STATUS,1
movlw 0x60
addwf NUMZ2,1
movlw 0x00
subwf NUMZ2,0
btfss STATUS,0
goto star
movlw 0x01
addwf NUMZ3,1
movlw 0x0A
subwf NUMZ3,0
btfss STATUS,1
goto star
bcf STATUS,0
bcf STATUS,1
movlw 0x06
addwf NUMZ3,1
;movlw 0x10
;addwf NUMZ1,1
movlw 0xA0
subwf NUMZ3,0
btfss STATUS,0
goto star
bcf STATUS,0
bcf STATUS,1
movlw 0x60
addwf NUMZ3,1
movlw 0x00
subwf NUMZ3,0
btfss STATUS,0
goto star
movlw 0x01
addwf NUMZ4,1
movlw 0x0A
subwf NUMZ4,0
btfss STATUS,1
goto star
bcf STATUS,0
bcf STATUS,1
movlw 0x06
addwf NUMZ4,1
;movlw 0x10
;addwf NUMZ1,1
movlw 0xA0
subwf NUMZ4,0
btfss STATUS,0
goto star
bcf STATUS,0
bcf STATUS,1
movlw 0x60
addwf NUMZ4,1
movlw 0x00
subwf NUMZ4,0
btfss STATUS,0
![]() goto star
goto star
movlw 0x99
movwf NUMZ1
movwf NUMZ2
movwf NUMZ3
movwf NUMZ4
star return
end
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 8497
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved