| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Motoare de executie
Motoarele de executie transforma semnalul electric de intrare in semnal me-canic de iesire. Aceste semnale sunt: tensiunea de alimentare a infasurarii statorice si turatia variabila a motoarelor asincrone. Cerinta transformarii este asigurata daca se realizeaza o dependenta liniara intre marimile de intrare si iesire cu cea mai mare rapiditate posibila. Acceleratia motoarelor de executie depinde de momentul de inertie al rotorului. Utilizare mai mare au motoarele asincrone cu rotor nemag-netic gol (fig.3.30).
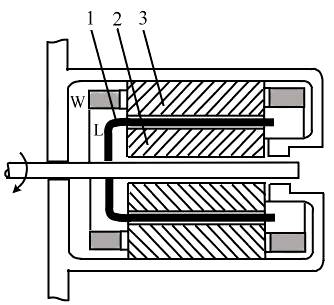
Fig.3.30 Motor asincron de executie cu rotor nemagnetic gol
Se utilizeaza insa si motoare asincrone cu rotor in scurtcircuit, cu rotor fero-magnetic compact, cu rotor feromagnetic gol la care constantele lor mecanice de timp sunt sensibil mai mari.
Motoarele de executie, cel mai adesea sunt monofazate, Infasurarea care pri-meste semnalul de intrare, se numeste de comanda wc. A doua infasurare we este alimentata cu tensiune variabila cu valoarea eficace Ue=const. Motoarele de exe-cutie sunt cu rotor nemagnetic gol (1) fig.3.30 si stator interior imobil (2) fig. 3.30 din material feromagnetic pentru reducerea reluctantei pe drumul fluxului. Rotorul gol este realizat din aluminiu sau aliaj din aluminiu. Infasurarile wc si we sunt plasate in statorul exterior (3) fig. 3.30 si decalate cu 90 in spatiu. Procedeele de baza privind realizarea comenzii sunt:
Ø comanda in amplitudine, cand se modifica numai valoarea amplitudinii tensiunii Uc cu mentinerea neschimbata a fazei;
Ø comanda in faza, cand amplitudinea ramane neschimbata, iar turatia n se regleaza prin variatia unghiului de defazaj al tensiunii Uc fata de Ue;
Ø comanda in amplitudine-faza, cand simultan se modifica si amplitudinea si faza semnalului de comanda Uc fata de Ue.
Schemele de comanda sunt prezentate in fig. 3.31. Mai usor de realizat este comanda in amplitudine-faza, deoarece nu se cer surse speciale de variatie a fazei tensiunii Uc sau retea bifazata de alimentare sau sursa.
Caracteristicile de reglare ce reprezinta particularitatile motoarelor asincrone de executie, sunt date in fig. 3.32. Acestea reprezinta dependentele turatiei de ro-tatie n de semnalele de comanda Uc sau βc la variatia marimii momentului rezistent (de sarcina) M la arborele motorului pentru schemele de comanda a, b si c. Cel mai adesea, aceste dependente se prezinta in unitati relative:
 unde
unde ![]() este turatia la functionarea in gol;
este turatia la functionarea in gol;
 unde
unde ![]() este momentul la scurtcircuit (cu rotorul
imobil);
este momentul la scurtcircuit (cu rotorul
imobil);
 sau
sau ![]() , unde
, unde ![]() - valoarea
relativa a semnalului de comanda.
- valoarea
relativa a semnalului de comanda.
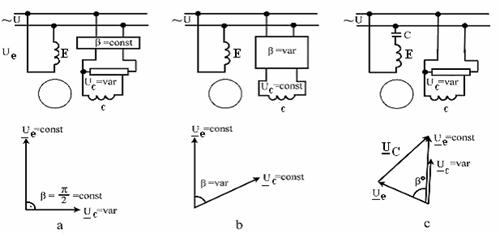
Fig. Schemele de comanda ale motorului asincron monofazat de executie
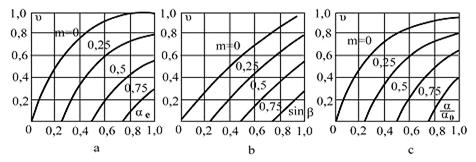
Fig. Caracteristicile de reglaj ale motorului asincron de executie:
dependentele turatiei n de semnalele de comanda Uc si ![]() la
variatia momentului rezistent
la
variatia momentului rezistent
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2565
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved