| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Motoare pas cu pas
Motoarele pas cu pas sunt masini sincrone, care transforma semnalele de intrare ca impulsuri electrice in unghiuri discrete sau deplasari liniare, numite pasi. La frecventa mare a impulsurilor, miscarea pas cu pas trece in miscare de rotatie continua. Motoarele pas cu pas se pot produce in serii arbitrare cu pasi in doua sensuri de rotatie fara erori in functionarea lor. Impulsurile electrice de comanda pot fi unipolare sau bipolare.
Principiul de executie si constructii
Principiul constructiv al motoarelor pas cu pas, indeosebi al rotoarelor, este asemanator cu cel al masinilor sincrone. Se utilizeaza constructia, in care in stator exista un numar mare de infasurari concentrate si plasate pe poli aparenti.
Infasurarile se alimenteaza succesiv de la sursa de comanda cu impulsuri unghiulare exacte. Din aceasta, rezulta ca fazorul fluxului magnetic se roteste in spatiu, pozitia lui fiind determinata de axa infasurarii alimentata in momentul examinat. Rotoarele motoarelor pas cu pas sunt de trei tipuri:
Ø activ cand este magnet permanent;
Ø reactiv cilindru cu suprafata danturata din material magnetic moale ca la motoarele sincrone reactive;
Ø hibride in a carui constructie se utilizeaza cele doua principii de mai sus - magnet permanent si suprafata danturata din material magnetic moale.
In fig.5.39 se observa constructii reale ale motoarelor demontate cu statoarele si rotoarele citate in cele 3 variante: a - activ; b - reactiv; c - hibrid. Statoarele prezentate au constructii caracteristice pentru toate motoarele pas cu pas.
Principiul de comanda al motoarelor pas cu pas
Dupa obtinerea semnalului de intrare de la dispozitivul de comanda la infa-surarile statorului, rotorul motorului pas cu pas se roteste. El se fixeaza pe directia fluxului magnetic care se excita datorita actiunii curentului prin infasurarile ali-mentate ale statorului (cel mai adesea - una sau doua).
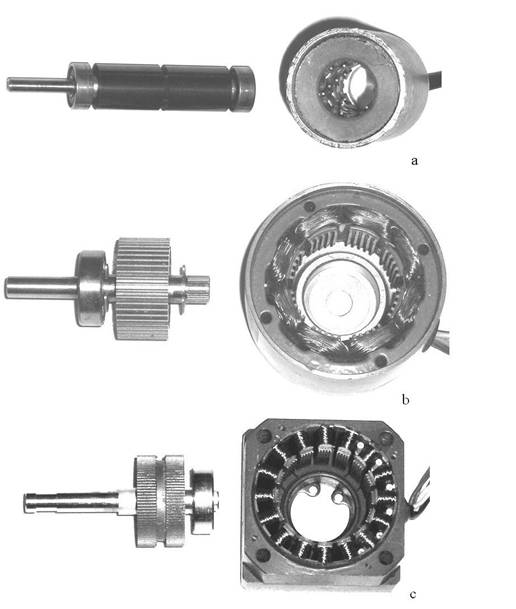
Fig.5.39 Constructii reale a motoarelor pas cu pas demontate:
a) cu rotor activ; b) cu rotor reactiv; c) cu rotor cilindric.
In fig.5.40 se prezinta constructia unui motor pas cu pas cu rotor activ impreuna cu doua scheme de principiu pentru comanda lor.

a b
Fig.5.40 Constructia motorului pas cu pas cu rotor activ impreuna cu schemele de principiu privind comanda lor: a) cu punct median conectat la sursa de alimentare fara modificarea polaritatii impulsului de alimentare; b) fara punct median, cu comanda bipolara;
Cele doua faze A si B ale statorului au acelasi numar de poli N si S. Diferen-ta consta in aceea ca infasurarile din fig.5.40 a au punctul median scos si conectat la sursa de alimentare, iar in schema din fig.5.40 b nu exista punct median.
Pentru schema a cele doua iesiri de la A si B se
conecteaza la cealalta pola-ritate a alimentarii prin intrerupatoarele
comandate ![]() si
si ![]() Prin acest procedeu se formeaza cate doua
jumatati de faza A si
Prin acest procedeu se formeaza cate doua
jumatati de faza A si ![]() B si
B si ![]() care se conecteaza inde-pendent la sursa de
impulsuri electrice cu tensiunea
care se conecteaza inde-pendent la sursa de
impulsuri electrice cu tensiunea ![]() Din schema se vede ca prin
Din schema se vede ca prin ![]() si
si ![]() trec curenti de polaritati inverse fata de A
si B, care creaza in polii fazelor fluxuri magnetice de sensuri opuse. Exemplu,
pentru prima faza alimentata mai sus A - polul este N, iar la functionarea lui
trec curenti de polaritati inverse fata de A
si B, care creaza in polii fazelor fluxuri magnetice de sensuri opuse. Exemplu,
pentru prima faza alimentata mai sus A - polul este N, iar la functionarea lui ![]() - polul este S. Dupa acelasi procedeu se
modifica polaritatile pentru B si
- polul este S. Dupa acelasi procedeu se
modifica polaritatile pentru B si ![]()
c
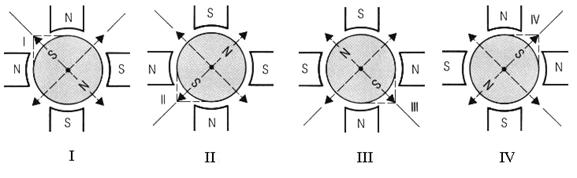
Fg.5.40 c Pozitiile rotorului motorului pas cu pas in timpul unei rotatii complete
In prima pozitie polii sunt conectati la alimentare
prin pozitiile 1 si 3 ale intrerupatoarelor pentru A si B. Rotorul se fixeaza
in pozitia stabilita de fluxul rezultant al celor doua faze (poz. I). Dupa ce ![]() se trece de la iesirea 1, la iesirea 2, se
alimenteaza
se trece de la iesirea 1, la iesirea 2, se
alimenteaza ![]() si B. Polaritatea polilor primei faze se
modifica si rotorul se roteste cu unghiul
si B. Polaritatea polilor primei faze se
modifica si rotorul se roteste cu unghiul ![]() (poz. II). Urmeaza alimentarea lui
(poz. II). Urmeaza alimentarea lui ![]() si
si ![]() de la iesirile 2 si 4, cand rotorul executa in
sens direct urmatorul pas de
de la iesirile 2 si 4, cand rotorul executa in
sens direct urmatorul pas de ![]() (poz. III).
(poz. III).
Rotorul se roteste in pozitia IV prin conectarea la
iesirile 1 si 4 a lui A si ![]() - din nou inca cu
- din nou inca cu ![]() La urmatoarea schimbare (functioneaza A si B)
se ajunge la pozitia initiala I.
La urmatoarea schimbare (functioneaza A si B)
se ajunge la pozitia initiala I.
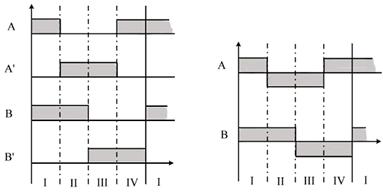
In cazul examinat din fig.5.40 a nu exista modificare a polaritatii impulsu-rilor de comanda, prezentate in fig.5.40 d. Acest regim de comanda este unipolar.
Principiul comenzii bipolare este prezentat in fig.5.40 b.
In acest caz infasurarile de faza A si B nu au punct
median comun. Schimbarea sensului curentului in faze, respectiv polaritatea
polilor se obtine prin conectarea curentului prin intreaga infasurare. Aceasta
se obtine prin intermediul intrerupatoarelor bipolare ![]() si
si ![]()
Functionarea motorului pas cu pas din fig.5.40 b se explica potrivit aceluiasi procedeu
ca in fig.5.40 a. In pozitia I
infasurarile A si B sunt conectate la sursa prin iesirile 1 ale
intrerupatoarelor ![]() si
si ![]() ce determina sensurile curentilor prin
infasurari si polaritatea polilor. Dupa deconectarea lui
ce determina sensurile curentilor prin
infasurari si polaritatea polilor. Dupa deconectarea lui ![]() de la iesirea 1 si conectarea lui la iesirea
2, curentul din faza A schimba sensul si polaritatea polilor lui A de asemenea se schimba - pozitia II. Rotorul
se roteste cu
de la iesirea 1 si conectarea lui la iesirea
2, curentul din faza A schimba sensul si polaritatea polilor lui A de asemenea se schimba - pozitia II. Rotorul
se roteste cu ![]() potrivit sensului noului flux rezultant.
potrivit sensului noului flux rezultant.
Dupa schimbarea iesirilor lui ![]() de la 1 la 2 se obtine polaritatea inversa a
curentului si prin faza B, cum si acea polaritate inversa a polilor ei.
Potrivit orientarii fluxului rezultant
de la 1 la 2 se obtine polaritatea inversa a
curentului si prin faza B, cum si acea polaritate inversa a polilor ei.
Potrivit orientarii fluxului rezultant ![]() rotorul se roteste cu unghi de
rotorul se roteste cu unghi de ![]() in pozitia III. Pozitia IV a rotorului se
obtine dupa cuplarea de la iesirea 2 la iesirea 1 a lui
in pozitia III. Pozitia IV a rotorului se
obtine dupa cuplarea de la iesirea 2 la iesirea 1 a lui ![]() Pozitia initiala I este dupa pasul rotorului
cu
Pozitia initiala I este dupa pasul rotorului
cu ![]() cand din nou intrerupatoarele
cand din nou intrerupatoarele ![]() si
si ![]() sunt in pozitia 1. Daca variatia polaritatii
are loc in serie inversa, rotirea va avea loc in sens invers.
sunt in pozitia 1. Daca variatia polaritatii
are loc in serie inversa, rotirea va avea loc in sens invers.
Variatia semnalelor de comanda este bipolara. Este prezentata in al doilea sistem de coordonate din fig.5.40 d pentru fazele A si B.
d
Fg.5.40 d Variatia bipolara a polaritatii semnalelor de comanda
Posibilitati de reducere a pasilor
Functionarea motoarelor pas cu pas din fig.5.40 se
caracterizeaza prin misca-rea rotorului cu pas complet. In cazul in care la
motorul bifazat ![]() este o pereche de poli pe faza, atunci acest
unghi este de
este o pereche de poli pe faza, atunci acest
unghi este de ![]() Unghiul
Unghiul ![]() se determina din expresia:
se determina din expresia:

Miscarea de rotatie neintrerupta (continua) se obtine prin aplicarea repetata a impulsurilor. La functionarea motoarelor pas cu pas se obtin unghiuri mici de rotatie a rotorului. Reducerea pasului se face in principiu potrivit urmatoarelor procedee:
Ø alegerea potrivita a variantei motorului pas cu pas;
Ø perfectionarea schemei de comanda a alimentarii infasurarilor.
In functie de aplicatii se utilizeaza constructii care se perfectioneaza conti-nuu. Motoarele cu rotor activ au comparativ moment mare si pozitionare stabila datorita magnetului permanent. Pentru reducerea pasului din punctul de vedere al constructiei, ele se executa cu cateva statoare inseriate, dispuse cu un unghi deter-minat unul fata de altul. Rotoarele sunt din materiale magnetice dure cu inductie remanenta mare. Se magnetizeaza zonele ce formeaza polii rotorici. Acest motor este prezentat in fig.5.41 a (ca si in fig.5.39 a), unde:
1 - rotorul in cele doua forme; 2 - statorul inferior; 3 - statorul superior;
4 - infasurarea statorului inferior; 5 - infasurarea statorului superior;
6 - piesa polara superioara a statorului superior;
7 - piesa polara inferioara a statorului superior.
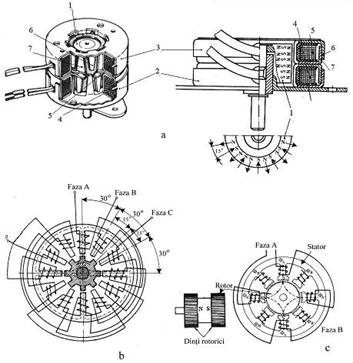
Fig.5.41 Motoare pas cu pas: a) cu doua statoare; b) cu numar mare de poli in stator si in rotor si piese polare danturate; c) motor pas cu pas cu rotor hibrid.
Motoarele reactive se alimenteaza cu impulsuri unipolare. Ele se executa cu numar mare de poli in stator si in rotor deoarece se dantureaza inclusiv si piesele polare (fig.5.41 b si fig.5.41 b). Motoarele pas cu pas cu rotor hibrid au constructie complexa pentru rotor. El are magnet permanent plasat intre doua bucsi (camasi) dintate. Aceste piese danturate sunt rotite una fata de cealalta cu jumatate din latimea dintelui. Magnetul permanent este magnet alcalin si acesta determina polarizatia inversa a bucselor dintate.
Comanda pasilor
Principiul de functionare al motorului din fig.5.40
consta in deplasarea rotorului cu pas complet (in cazul ![]() ). In
functie de comanda, rotatia se poate realiza cu unghi de
). In
functie de comanda, rotatia se poate realiza cu unghi de ![]() (jumatate
de pas); cu unghi de
(jumatate
de pas); cu unghi de ![]() (sfert de pas).
(sfert de pas).
Daca pentru motorul din fig.5.40 b notam cu A si B functionarea la sensul pozitiv al curentilor, iar
cu ![]() si
si ![]() - la
sensul negativ, se poate arata diferenta in pozitia polilor S-N la pas intreg,
pe jumatate si pe sfert. Steaua din fig.5.42 a indica pozitia rotorului (S-N), care corespunde la pas complet
(fig.5.40). Liniile pline, cu sageti, indica orientarea polilor N-S. In fig.5.42
b este data steaua pozitiilor
rotorului la jumatate de pas. In timp ce in primul caz, curentul trece
totdeauna prin doua infasurari, aici aceasta este valabila pentru primul, al
treilea, al cincilea pas s.a.m.d. Prin mijloacele celui de-al doilea, al
patrulea, al saselea pas s.a.m.d., curentul trece numai prin una din cele doua
infasurari A si B. Pentru rotirea completa a rotorului sunt necesari 8 pasi
- la
sensul negativ, se poate arata diferenta in pozitia polilor S-N la pas intreg,
pe jumatate si pe sfert. Steaua din fig.5.42 a indica pozitia rotorului (S-N), care corespunde la pas complet
(fig.5.40). Liniile pline, cu sageti, indica orientarea polilor N-S. In fig.5.42
b este data steaua pozitiilor
rotorului la jumatate de pas. In timp ce in primul caz, curentul trece
totdeauna prin doua infasurari, aici aceasta este valabila pentru primul, al
treilea, al cincilea pas s.a.m.d. Prin mijloacele celui de-al doilea, al
patrulea, al saselea pas s.a.m.d., curentul trece numai prin una din cele doua
infasurari A si B. Pentru rotirea completa a rotorului sunt necesari 8 pasi ![]()
In fig.5.42 c
este prezentata realizarea regimului cu 4 pasi. Noua pozitie a rotorului dintre
cele doua pozitii cu semipas se pot obtine, daca se conecteaza si jumatatile
infasurarilor A si B - pozitiile 2, 4, 6 s.a.m.d. Pentru pozitiile 3, 7, 11, 15
se alimenteaza cu curent in sens direct sau invers intregile faze independente,
iar pentru pozitiile 1, 5, 9, 13 - simultan doua faze A sau ![]() si B sau
si B sau ![]()
A' A' A' A' A' A'
![]()
![]()
![]()
![]()
![]()
Fig.5.42 Pozitiile rotorului pentru diferiti pasi: a) pas complet;
b) pentru pas pe jumatate; c) regimul cu patru pasi.
Masuri de imbunatatire a functionarii motoarelor pas cu pas
Cresterea numarului de impulsuri, respectiv a pasilor,
ridica probleme legate de functionarea rapida si exactitatea in stabilirea
pasilor. Impulsurile tensiunii de alimentare sunt unghiuri drepte. Deoarece infasurarile
statorice au inductivitate importanta, curentul la conectarea infasurarii
variaza ca in procesele tranzitorii din circuite RL cu constant de timp ![]() , cum se
prezinta in fig.5.43 a.
, cum se
prezinta in fig.5.43 a.
La viteza mai mare de crestere a curentului se pot obtine cum se folosesc unele variante:
Ø prin reducerea constantei de timp (prin
conectare de ![]() si tensiune U ridicata;
si tensiune U ridicata;
Ø prin doua nivele ale tensiunii de alimentare si prin comanda mai complexa;
dupa cum se aplica impulsul de comanda (chopper - de comanda) si se alege tensiunea de alimentare suficient de mare.
In primul caz se obtine:  dar pe
dar pe ![]() apar pierderi excesive (inutile).
apar pierderi excesive (inutile).
In al doilea caz este necesara o sursa cu doua nivele
de tensiune ![]() si
si ![]() La inceput se aplica tensiunea inalta
La inceput se aplica tensiunea inalta ![]() si curentul creste rapid. Dupa un timp
stabilit alimentarea se comuta la tensiunea
si curentul creste rapid. Dupa un timp
stabilit alimentarea se comuta la tensiunea ![]() Aceasta varianta de comanda ofera rezultate
mai bune la moment de antrenare ridicat si cresteri a frecventei impulsu-rilor
de comanda.
Aceasta varianta de comanda ofera rezultate
mai bune la moment de antrenare ridicat si cresteri a frecventei impulsu-rilor
de comanda.
Forma impulsurilor de curent si variatia lui la comanda prin impuls cu doua nivele de tensiune se prezinta in fig.5.43 b.
Comanda prin impuls este ilustrata in fig.5.43 c. Aceasta metoda ofera indicii cei mai
buni pentru accelerarea motorului fara a se inrautati ![]()
La motoarele pas cu pas se defineste frecventa de sensibilitate. Aceasta este frecventa maxima a impulsurilor pentru care rotorul se roteste cu unghiul dat fara a se omite pasul. Acest indicator depinde sensibil de mijloacele examinate de comanda si este mai bun decat la comanda prin impuls.
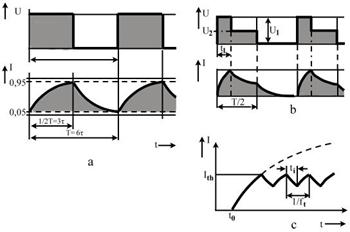
Fig.5.43 Variatia curentului prin infasurari: a) ca in procesele tranzitorii din circuitele RL;
b) la comanda prin impuls cu doua nivele de tensiune; c) comanda prin
Statorul masinilor sincrone are aceeasi constructie ca si statorul masinilor asincrone. El este constituit din circuitul magnetic cilindric din tole de otel electrotehnic, in crestaturile caruia se plaseaza infasurarea trifazata, cel mai adesea conectata in stea. Rotorul indeplineste rolul inductorului si este destinat a crea fluxul magnetic al masinii. El reprezinta sistemul de electromagneti cu poli aparenti sau inecati, a caror infasurare se alimenteaza de la sursa de c.c., numita excitatoare.
Obisnuit ca excitatoare se utilizeaza generatorul de c.c. cu excitatie paralela, care cel mai adesea se monteaza pe arborele comun cu masina sincrona. Puterea excitatoarei este de (0,33)% din puterea masinii sincrone. In unele cazuri in locul generatorului de excitatie (excitatoarei) se utilizeaza redresorul comandat.
Rotoarele cu poli aparenti se utilizeaza la masinile sincrone lente (n1<1500 rot./min), unde fortele centrifuge sunt mici. Acestea sunt spre exemplu hidrogene-ratoarele. La rotoarele cu poli aparenti, bobinele infasurarii de excitatie se plaseaza pe poli. La trecerea curentului continuu prin infasurarea de excitatie se obtine alter-nanta succesiva a polilor nord si sud. Datorita faptului ca fluxul magnetic de exci-tatie este constant, polii se pot executa masivi si nu din tole. Schema constructiva de principiu a masinii sincrone cu poli aparenti este prezentata in fig.5.1 a.
La masinile sincrone rapide (n1=1500 sau 3000 rot./min) pentru a se obtine rezistenta mecanica necesara, rotoarele se executa cu poli inecati.
Acestea sunt de exemplu turbogeneratoarele. La masinile cu polii inecati in rotorul, executat din otel masiv, se realizeaza crestaturi in care se plaseaza conductoarele infasurarii de excitatie.
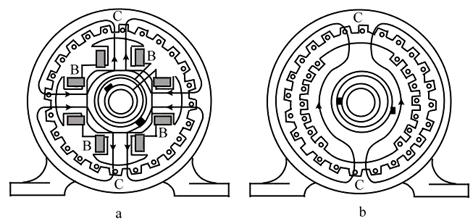
Fig.5.1 a, b Schema principala constructiva a masinii sincrone
cu poli aparenti (a) si poli inecati (b)
Crestaturile se inchid cu pene magnetice speciale, iar conexiunile frontale se consolideaza cu bandaje. Astfel de constructie este stabila la forte centrifuge mai mari. Obisnuit rotoarele cu poli inecati sunt bipolare. In fig.5.1 b se prezinta sche-ma de principiu constructiva a masinii sincrone cu poli inecati.
Electromagnetii
rotorului (inductorului) excita fluxul magnetic ![]() constant in timp, care se distribuie in
intrefierul masinii dupa o lege sinusoidala. Iata de ce la rotatia rotorului in
fiecare faza a infasurarii statorului se induce t.e.m. sinu-soidala e0, a carei valoare efectiva
se poate exprima ca si la motoarele asincrone, adica
constant in timp, care se distribuie in
intrefierul masinii dupa o lege sinusoidala. Iata de ce la rotatia rotorului in
fiecare faza a infasurarii statorului se induce t.e.m. sinu-soidala e0, a carei valoare efectiva
se poate exprima ca si la motoarele asincrone, adica
![]()
unde:
kw - este factorul de bobinaj al infasurarii statorice (are aceeasi semnificatie ca si la motoarele asincrone), iar w este numarul de spire al unei infasurari de faza.
Pe aceasta se bazeaza principiul de functionare al generatoarelor sincrone.
Caracteristic pentru masinile sincrone este faptul ca turatia n1 a rotorului si frecventa f1 a t.e.m. (respectiv a curentului) din infasurarea statorica totdeauna se afla intr-o relatie constanta strict determinata, adica
f1=pn1, sau  (5.1)
(5.1)
unde:
p - numarul perechilor de poli;
In consecinta, atunci
cand masina functioneaza ca generator cu numar de pe-rechi de poli p
determinat, trebuie a se roti cu viteza unghiulara ![]() strict determi-nata (respectiv cu turatia n1), pentru a se genera
t.e.m. cu frecventa f1
dorita.
strict determi-nata (respectiv cu turatia n1), pentru a se genera
t.e.m. cu frecventa f1
dorita.
Atunci cand masina sincrona functioneaza in regim de
motor si este cu numarul de perechi de poli p determinat, ea trebuie a se
alimenta cu curentul alter-nativ cu frecventa f1 strict determinata, pentru a se obtine viteza
unghiulara ![]() (respectiv turatia n1) dorita sau stabilita in prealabil. Tocmai datorita
acestei sincro-nizari dintre frecventa t.e.m. (respectiv a curentului) din
stator si turatia rotorului, masinile se numesc sincrone.
(respectiv turatia n1) dorita sau stabilita in prealabil. Tocmai datorita
acestei sincro-nizari dintre frecventa t.e.m. (respectiv a curentului) din
stator si turatia rotorului, masinile se numesc sincrone.
Avand in vedere ca frecventa industriala este f=50 Hz, daca masina are p=1, 2, 3, 4.n perechi de poli, turatia rotorului in mod corespunzator este:
n1=3000, 1000, 750 . etc. rot./min
La trecerea curentilor i1, i2, i3,
ce formeaza sistemul trifazat, prin infasurarea statorica a masinii sincrone
asemanatoare cu a motoarelor asincrone se creaza cam-pul magnetic invartitor
statoric, de flux magnetic ![]() (fluxul de
reactie a indusului).
(fluxul de
reactie a indusului).
Turatia acestui camp na (respectiv viteza
unghiulara ![]() ) depinde
de numarul polilor echivalenti ai infasurarii statorului (indusului - egal cu
numarul polilor in-ductorului) si de frecventa curentului prin infasurare. In
acest caz,
) depinde
de numarul polilor echivalenti ai infasurarii statorului (indusului - egal cu
numarul polilor in-ductorului) si de frecventa curentului prin infasurare. In
acest caz,  (respectiv
(respectiv ![]() ). Prin
urmare, campul inductorului (rotorului) si campul indusu-lui (statorului) se
rotesc sincron. Ele creaza campul magnetic rezultant, al carui flux magnetic
este:
). Prin
urmare, campul inductorului (rotorului) si campul indusu-lui (statorului) se
rotesc sincron. Ele creaza campul magnetic rezultant, al carui flux magnetic
este:
![]() (5.2)
(5.2)
Turatia campului rezultant, natural ca va fi egala cu aceea a rotorului masi-nii n1. Din interactiunea electromagnetica a curentului din infasurarea statorului si campului magnetic invartitor rezultant apare momentul electromagnetic din masi-na. Pe acest principiu se bazeaza functionarea masinii sincrone in regim de motor.
Interactiunea electromagnetica dintre curentul din infasurarea statorica si campul magnetic invartitor rezultant se poate exmina ca interactiunea dintre polii rotorici si polii fictivi ai campului magnetic rezultant. In plus, la polul dat de rotor cu polaritatea stabilita, corespunde polul fictiv al campului magnetic invartitor rezultant cu polaritate opusa, intre care exista interactiune electromagnetica (forte de atractie).
Datorita faptului, ca
intre polii de nume diferite exista forte de atractie, roto-rul si campul
magnetic invartitor se rotesc sincron. Daca se examineaza rotatia ro-torului
motorului sincron neincarcat in conditii idealizate (se neglijeaza pierderile
mecanice), polii rotorici si polii fictivi ai campului magnetic invartitor vor
fi coaxiali. Daca insa cu ajutorul unui motor primar se accelereaza rotorul
masinii sincrone, campul magnetic invartitor ramane in urma fata de rotor. In
plus, campul si rotorul continua a se roti sincron dar axa polilor rotorici
depaseste cu unghiul ![]() axa polilor fictivi ai campului. In acest caz,
rotorul este conducator, deplasat cu unghiul
axa polilor fictivi ai campului. In acest caz,
rotorul este conducator, deplasat cu unghiul ![]() fata de campul invartitor in sensul de
rotatie.
fata de campul invartitor in sensul de
rotatie.
Pe seama energiei mecanice, cedata de motorul primar rotorului masinii sincrone, in infasurarea ei statorica se genereaza energia electrica, care se cedeaza in retea. In consecinta, masina sincrona functioneaza in regim de generator.
Momentul electromagnetic este de sens invers (rezistent) deoarece campul magnetic invartitor exercita actiune de franare in raport cu miscarea de rotatie a rotorului.
Unghiul ![]() este negativ, iar marimea lui depinde de
energia mecanica cedata rotorului masinii sincrone. Atunci cand ea este mai
mare, unghiul creste. Creste de asemenea si energia electrica generata de
generatorul sincron.
este negativ, iar marimea lui depinde de
energia mecanica cedata rotorului masinii sincrone. Atunci cand ea este mai
mare, unghiul creste. Creste de asemenea si energia electrica generata de
generatorul sincron.
Daca se realizeaza
momentul rezistent de sens invers la arborele masinii sin-crone, rotorul ramane
in urma fata de campul magnetic invartitor. In acest caz, campul este
conducator, adica unghiul ![]() dintre axa polilor campului si rotorului este
pozitiv. Cu cresterea sarcinii la arbore,
dintre axa polilor campului si rotorului este
pozitiv. Cu cresterea sarcinii la arbore, ![]() creste. Pentru invingerea cuplului rezistent,
masina sincrona incepe a consuma o cantitate de energie electrica mai mare din
retea, adica ea trece in regim de motor.
creste. Pentru invingerea cuplului rezistent,
masina sincrona incepe a consuma o cantitate de energie electrica mai mare din
retea, adica ea trece in regim de motor.
Prin urmare campul magnetic rezultant invartitor si rotorul masinii sincrone se rotesc sincron, dar plasarea axelor polilor lor depinde de regimul de functionare al masinii si de incarcare.
In continuare, se examineaza in principiu regimul de generator si de motor al masinii sincrone, unde pentru inlesnire se considera spre exemplu masina cu poli inecati si se neglijeaza saturatia circuitului magnetic si pierderile din fierul magnetic.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 6531
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved