| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
ALGORITUMUL DE PROIECTARE AL SISTEMULUI MECANIC al unui Robot Industrial se prezinta in figura3.1.
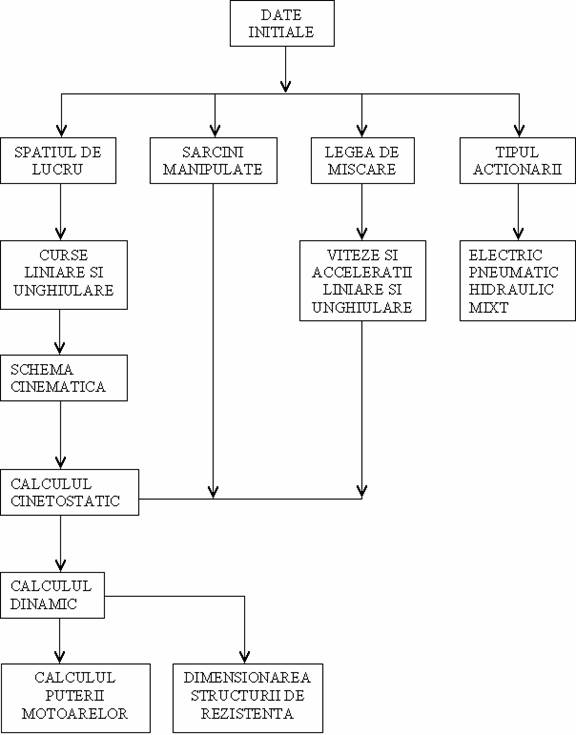
Figura 3.1 Algoritm de proiectare al unui Robot Industrial

|
Tipul Robotului |
KR 3 SI |
|
Greutate maxima de preluat |
1.5 Kg |
|
Numar de grade de mobilitate |
6 |
|
Flansa de montare |
DIN ISO 9409 - 1 - A450 |
|
Pozitia de montare |
Podea/Tavan |
|
Repetabilitate |
0.05mm |
|
Controller-ul |
KR C3 |
|
Greutatea aproximativa |
54 Kg |
|
Spatiul de lucru |
0.679 m3 |

|
Tipul robotului |
Painter IRB 5500 |
|
Acceleratia |
20m/s2 |
|
Viteza medie de vopsire |
1.5-2 m/s |
|
Greutatea |
540 Kg |

|
Tipul robotului |
KR 60 JET |
|
Greutatea de incarcare |
60 Kg |
|
Greutatea suplimentara de incarcare |
35 Kg |
|
Greutatea totala distribuita |
95 Kg |
|
Lungimea Bratului |
820 mm |
|
Numar de grade de mobilitate |
6 |
|
Flansa de montare |
DIN ISO 9409-1-A100 |
|
Greutatea robotului |
435 Kg |
|
Spatiul de lucru |
5.70 m2 |

|
Incarcarea |
6 Kg |
|
Incarcarea suplimentara pe fiecare brat |
10 Kg |
|
Sarcina distribuita |
36 Kg |
|
Numar de grade de libertate |
6 |
|
Posibilitati de mintare |
Podea/plafon |
|
Repetabilitate |
0.1mm |
|
Greutatea robotului |
235 Kg |
|
Spatiul de lucru |
9.2m3 |
|
Sarcina utila |
16 Kg |
|
Incarcarea suplimentara |
10 Kg |
|
Sarcina distribuita total |
46 Kg |
|
Numar de grade de libertate |
6 |
|
Posibilitati de montare |
Podea/Perete/Plafon |
|
Repetabilitate |
0.1mm |
|
Greutatea robotului |
235 Kg |
|
Spatiul de lucru |
14.5 m3 |
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1479
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved