| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
ANALIZA STRUCTURALA A MECANISMULUI CU PARGHII
1 Determinarea familiei si a gradului de mobilitate
Pentru determinarea familiei mecanismului, in fig. 1.4, s-a reprezentat schema cinematica a mecanismului studiat; s-au numerotat prin cifre arabe elementele mecanismului si prin cifre romane cuplele cinematice. Din analiza structurala a schemei cinematice a mecanismului, se observa urmatoarele:
numarul de elemente mobile, n=5;
numarul cuplelor de clasa a V : C5=7
5 articulatii, in punctele :
I: O1;
II: A;
III: B24;
IV: B34;
V: O3;
VI: C45;
1 cupla de translatie, in punctul C50.
numarul cuplelor de clasa a IV, C4=0.
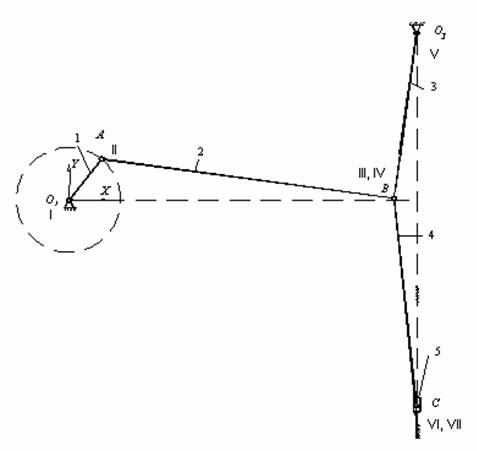
Fig. 1.4
Din tabelul miscarilor elementelor in raport cu sistemul cartezian de referinta asociat bazei, se observa ca exista 3 restrictii comune impuse tuturor elementelor mecanismului ( X Y, vZ). Axa O1z este perpendiculara pe planul xO1y si orientata spre noi. Prin urmare rezulta ca mecanismul este un mecanism plan, de familia f=3. Se utilizeaza formula structurala Cebasev-Grubbler:
![]()
Numarul total de cuple:
![]()
Numarul de contururi ale mecanismului:
![]()
Tabelul 1 1
|
Ele-ment |
ROTATIE |
TRANSLATIE |
||||||||||
|
X |
Y |
ωZ |
vX |
vY |
vZ |
|||||||
|
1 | ||||||||||||
|
2 |
|
|||||||||||
|
3 | ||||||||||||
|
4 | ||||||||||||
|
5 | ||||||||||||
Daca se considera mecanismul de familia 0, gradul de mobilitate corespunzator se calculeaza cu relatia:
![]()
Pentru verificarea corectitudinii determinarii familiei, se utilizeaza relatia:
![]()
Mecanismul are un gradul de mobilitate 1 si deci pentru ca miscarea sa fie determinata (mecanismul sa fie desmodrom), este necesar ca numarul de elemente conducatoare sa fie egal cu gradul de mobilitate pentru familia 3, adica 1.
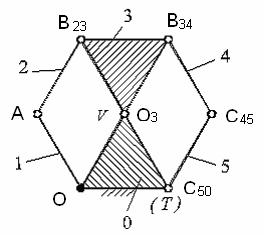
2 Reprezentarea schemei structurale a mecanismului
Pornind de la schema cinematica a mecanismului, reprezentata in fig. 1.4, s-a reprezentat schema structurala a acestuia in fig. 1.5.
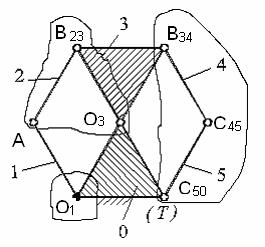
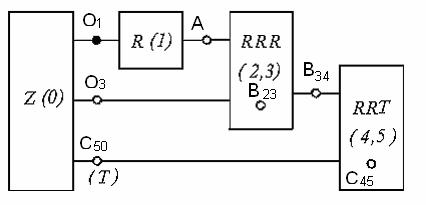
In fig. 1.6 se reprezinta, pe schema structurala, impartirea in grupe structurale a mecanismului.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1910
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved
