| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Tehnici de reglare a sistemelor
Asa cum s-a precizat in cursurile anterioare, teoria reglarii sistemelor este una din elementele de baza in prelucrarea informatiilor in sistemele multi-agenti. Atingerea unor stari sau stabilizarea acestora sunt cerinte pe care sistemele de reglare trebuie sa le indeplineasca sistematic. Tehnicile de reglare utilizeaza modele.
In acest curs se prezinta doar o introducere in cele mai importante concepte de reglare.
Elemente de baza ale reglarii sistemelor
Metodele tehnicii de reglare se bazeaza pe modelarea elementelor din bucla de reglare (controler, actuator, proces) si reglarea, prin functii discrete/continui in timp GP, GR, a elementelor de reglare (senzor, modul de supraveghere, calculul erorii si a marimii de comanda (fig. 7.1). Formele cele mai importante sunt: reglarea conducerii si valoarea de terminare a reglarii.
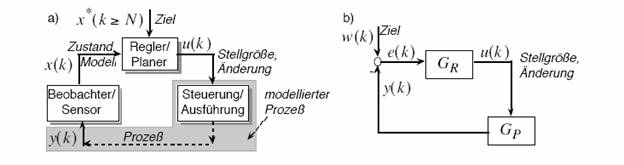
fig. 7.1 Bucla de reglare simpla: a) in sistem, b) in model
In reglarile conducerii trebuie ca marimea de reglare y (k) sa urmareasca cat mai bine posibil marimea de conducere w( k) astfel incat eroarea de reglare (abaterea reglarii) e (k)= w( k)- y (k) sa ramana cat mai mica posibil. Marimea de reglare poate fi interpretata ca starea actuala, cea de conducere ca starea tinta si eroarea de reglare ca distanta (diferenta).
La reglarea prin valoarea de terminare a reglarii, o anumita starea finala a procesului x (N) trebuie atinsa si mentinuta intr-un interval de timp N, determinat anterior sau nu.
![]() Algoritmii de reglare
digitali sau discreti in timp utilizeaza valorile date de modulul de
supraveghere la prelucrarea succesiva a informatiilor si la stabilitatea
conducerii. Frecventa de sesizare este data de dinamica procesului si
influenteaza stabilitatea reglarii. Ea determina
perioada de sesizare T0. Pentru a putea utiliza o anumita
frecventa de sesizare, trebuie ca suma timpilor de prelucrare a informatiilor
(fig 7.2) din cadrul reglarii cu functia GR sa fie mai mica decat T0: : tO
+tC <=T0.
Daca se doreste o conducere in timp real, trebuie ca noua stare a marimii de
reglare sa se atinga in durata de timp T0
Algoritmii de reglare
digitali sau discreti in timp utilizeaza valorile date de modulul de
supraveghere la prelucrarea succesiva a informatiilor si la stabilitatea
conducerii. Frecventa de sesizare este data de dinamica procesului si
influenteaza stabilitatea reglarii. Ea determina
perioada de sesizare T0. Pentru a putea utiliza o anumita
frecventa de sesizare, trebuie ca suma timpilor de prelucrare a informatiilor
(fig 7.2) din cadrul reglarii cu functia GR sa fie mai mica decat T0: : tO
+tC <=T0.
Daca se doreste o conducere in timp real, trebuie ca noua stare a marimii de
reglare sa se atinga in durata de timp T0
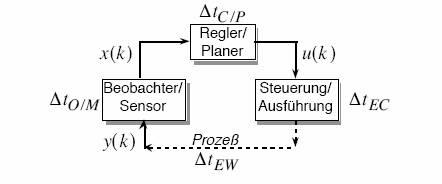
Fig. 7.2 Intarzierea ca timp prin proces si prin componente pentru sesizare, reglare si conducere
La implementarea descentralizata a sistemului de reglare prin mai multe task-uri, intr-un sistem de operare multitasking, trebuie verificat, pe langa timpul de prelucrare a unui task, in plus timpul necesar pentru comunicare intre task-uri ca si timpul intre activarea task-urilor.
Notiunea de stabilitate asimptotica a reglarii descrie capabilitatea reglarii ca abaterea acesteia (distanta pana la tinta) sa fie intr-adevar redusa la zero in decursul trecerii timpului. Abaterea reglarii poate sa aiba valori alternante periodic in timp.
Stabilitate la limita apare atunci cand abaterea reglarii se apropie asimptotic de o valoare limita mai mare ca zero si alterneaza in jurul valorii limita.
Instabilitate monotona sau oscilanta este definita atunci cand abaterea reglarii creste continuu. Pentru sisteme liniare discrete in timp exista metode prin care sa se atinga conditii de stabilitate prin functiile de proces si de reglare GP, GR.
Exemplu: stabilitate la deplasarea de-a lungul unui zid . Wall-following
Un robot mobil mic poate masura, prin senzori, distanta sa relativa pana la un zid, in timpul deplasarii sale in fata. Senzorii au un domeniu limitat de sesizare, de masurare a distantei de maximum 5 cm. Aceasta apare la momente discrete de timp numai pentru o viteza de deplasare constanta in fata si o distanta precomandata constanta pana la zid. Daca se mareste distanta fata de zid, robotul se roteste spre zid. Daca se micsoreaza aceasta distanta, robotul se roteste in sens invers fata de zid (fig. 7.3).
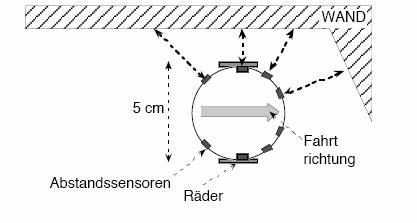
Fig. 7.3 Reglarea distantei unui robot fata de un zid pentru deplasarea acestuia de-a lungul zidului
La cresterea frecventei de supraveghere si de calcul, se poate ca distanta comandata pana la zid sa aiba usoare abateri. La o frecventa micsorata, robotul va incepe sa se deplaseze in linie serpuita de-a lungul zidului. Daca frecventa scade in continuare, poate sa apara o coliziune cu zidul sau senzorii nu mai pot sesiza zidul. Reglarea devine instabila.
Modelarea componentelor din bucla de reglare (conducere, actuator, proces) ca o functie clara de intrari/iesiri se poate face prin reprezentarea marimilor starilor. In acest caz se va utiliza nu numai marimea de reglare actuala y (k ), ci si o stare x( k) , care ae bazeaza pe starea initiala x si insumeaza mai multe marimi de reglare anterioare y (k , y (k si mai multe stari anterioare x( k ,x (k- Ecuatia urmatoare exprima cum o stare, care rezulta din ultimele 3 marimi de reglare si de aici, cum poate fi determinata din marimea de reglare actuala y (k) si din ultima stare x (k
x(k)=[y(k), y(k-1), y(k-2)]=[y(k), x(k-1)[1], x(k-1)[2]]
La reglarea prin valoarea de terminare a reglarii trebuie luate in considerare nu numai marimea de reglare actuala ci si ultimele doua valori ale marimii de reglare. Starea actuala la multe din procesele reglate nu este direct masurabila, ci este determinata din mai multe marimi masurate. Sunt cazuri in care numai marimile de comanda si de reglare se pot masura si trebuie ca starea sa fie dedusa din aceste doua marimi. De aici comanda actionarii activeaza in paralel un model al procesului, cu acesta se calculeaza si se memoreaza starea actuala a marimii de reglare ˆy(k). In modulul de supraveghere se compara valorile actuale ˆy( k) si cele tinta y (k ) si se utilizeaza la determinarea starii actuale ale lui x (k).
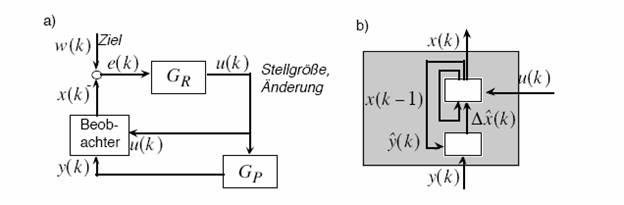
Fig. 7.4 a) Modelul reglarii marimii de stare cu modulul de supraveghere, b) Modelul modulului de supraveghere
In figurile 7.1b si 7.4a procesul global reglat este modelat printr-o functie GP, pentru care s-a proiectat functia de reglare GR, care asigura ca:
![]() (7.3)
(7.3)
In aceasta forma de modelare nu sunt diferentiate procesul dinamic propriu-zis (de exemplu, starea externa) si elementul de executie (de exemplu, actuatorul care determina interactiunea), ci acestea sunt modelate ca un element intreg. Daca ne referim la exemplul cu robotul mobil de mai sus, nu exista o separare explicita intre metoda de modificare a directiei, atributele de reflexie ale mediului si metoda de masurare a distantei pana la zid.
Din punctul de vedere al tehnicii de reglare, elementele de executie, procesul extern si sistemul de masurare sunr modelate cu o functie si interpretate ca un proces. In structura sistemelor autonome, dimpotriva, componentele actuatoare si senzori sunt socotite in sistemul de comanda al procesului. Daca un sistem autonom trebuie sa regleze si sa stabilizeze mai multe procese externe, atunci trebuie ca elementele de executie si mecanismele de interactiune, ca si metodele de masurare si sistemul de masurare sa fie modelate independent de procesul extern (fig. 7.5).
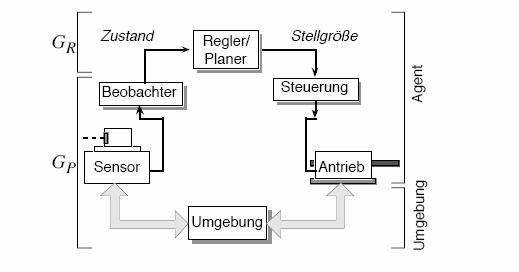
Fig. 7.5 Separarea sistemului global in agent si mediu, respectiv in reglare si proces
Bucla de reglare simpla
Se va descrie in cele ce urmeaza, un exemplu de influenta a reglarii simple in urmarirea unui mobil de catre altul. Robotul mobil din fata se deplaseaza cu o viteza oarecare, necunoscuta de catre mobilul urmaritor (fig. 7.6).
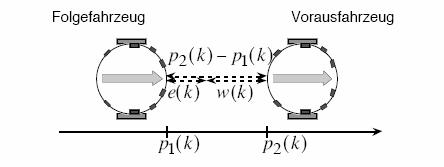
Fig. 7.6 Deplasarea prin urmarire a doua mobile
Mobilul din spate cauta sa mentina distanta prescrisa fata de robotul din fata. Robotul urmaritor este echipat cu motor pas cu pas. Modulul de reglare poate sa dea, in fiecare moment de timp al tactului (comanda directa cu indexarea timpului) numarul de pasi, pentru ca acesta sa se miste. Marimea de comanda, adica numarul maxim de pasi la o indexare, este limitata la valoarea
uˆ( k).
In cazul cel mai simplu, se neglijeaza viteza robotului si se regleaza numai distanta. Spatiul starilor, in care modulul de reglare al robotului urmaritor poate sa intervina cu modificari, este unidimensional, in care in unitatea de timp, se pot returna un sir de mai multi pasi pentru motor.
De aceea, spatiul starilor este discret in timp (domeniu de definitie este discretizat) si cuantificat (domeniu discret al valorilor).
Daca intr-un tact al timpului, modulul de reglare nu genereaza nici o marime de comanda, atunci nu se poate face nici o predictie cu privire la starea urmatoare. Practiv, mobilul se deplaseaza prin inertie.
Modificarile de stare, respectiv noua stare se pot masura prin mai multe metode.
. Combinatii intre senzorii interni si cei externi: mobilul urmaritor cunoaste din exterior pozitia absoluta a mobilului din fata si isi determina pozitia pornind de la o pozitie initiala cunoscuta si din insumarea (integrarea) marimilor sale de comanda.

. Senzori de masurare relativa: robotul din spate poate sa-si masoare direct distanta fata de robotul din fata prin senzori:
![]()
Se poate stabili o reglare simpla numai cu aceasta informatie de distanta, fara o cunoastere clara a sirului real de valori in bucla de reglare. Dupa activarea reglarii, se stabileste un salt al marimii de stare dintr-o stare initiala predefinita e x( 0, intr-o stare reala e x( (marimea a treptei normate).
Exemplu: reglarea distantei cu timp de reglare minim (marime de comanda maxima)
La reglarea saltului in timp minim, un factor important este limita marimii de comanda uˆ:
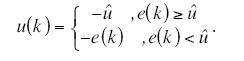 (7.6)
(7.6)
Timpul necesar pentru reglarea unui sistem static:

(7.7)
Variatia erorii de reglare, pentru cazul in care mobilul din fata nu se misca, este prezentata in fig 7.7.
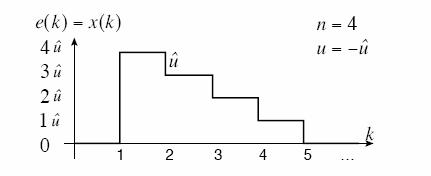
Fig. 7.7 Reglarea cu valoarea maxima a marimii de comanda si limitarea acesteia uˆ
De asemenea, poate fi aleasa si alta reglare, in care marimea de comanda nu variaza brusc cu valoarea sa maxima. Limitarea marimii de comanda nu permite o modelare printr-o functie liniara si complica crearea unui model sistematic. Un alt concept de reglare propune atingerea starii tinta intr-un timp de reglare dat, in loc de minimizarea acestui timp.
Exemplu: reglarea distantei cu un timp de reglare dat (valoarea minima a marimii de comanda)
Pentru o reglare simpla a saltului in trepte intr-un timp dat, functia de calcul a marimii de comanda este:
In acest caz se va stabili pentru inceput o valoare constanta a marimii de comanda. Este bine sa se determine marimea actuala de comanda din timpul si diferenta (abaterea ) de reglare ramase:
![]() Din aceasta ecuatie se
observa daca se poate respecta timpul de reglare prescris. Rezulta atunci:
Din aceasta ecuatie se
observa daca se poate respecta timpul de reglare prescris. Rezulta atunci:
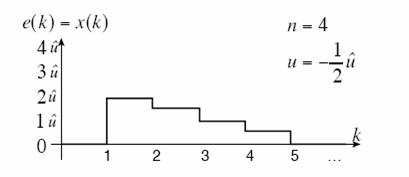
Fig. 7.8 Reglarea cu valoarea minima a marimii de comanda si limitarea acesteia uˆ
Reglarea din ambele exemple, atata timp cat limita marimii de comanda nu este atinsa, este o reglare proportionala, pentru ca marimea de comanda este direct proportionala cu eroarea de reglare. De indata ce valoarea limita a marimii de comanda este atinsa, se ajunge la o reglare neliniara.
Functia de reglare corespunde unui model invers, in care marimea de comanda se poate calcula direct din starea actuala si din starea tinta propusa. Aici se iau in considerare urmatoarele presupuneri:
. daca se poate calcula, ce eroare de reglare e (k +1) se obtine la introducerea unei noi marimi de comanda u (k), atunci se poate calcula si invers, adica ce modificare este necesara, ca sa se obtina o stare dorita.
. modificarea poate fi liniara, impartita in mai multe mici transformari si, corespunzator, se poate de asemenea ca si marimea de comanda sa fie impartita liniar.
Aceste presupuneri nu sunt intotdeauna valabile. Se poate ca limitele marimii de comanda sa nu fie simetrice sau marimea de comanda sa ia numai anumite valori dintr-un domeniu de valori care depind de stare, etc. In aceste cazuri se poate defini un model invers numai pentru un subdomeniu al spatiului starilor. Si perturbatiile pot conduce la concluzia ca o divizare liniara nu este posibila.
Componente proportionale, diferentiale si integrale
Reglarea cea mai simpla este cea proportionala, de forma:
u(k)= K. e (k)
Aceasta reprezentare este denumita si 'algoritmul de situare', pentru ca marimea de comanda se calculeaza direct pentru o situare data. Daca este posibil sa se memoreze si ultima marime de comanda si de reglare, atunci putem utiliza si 'algoritmul de viteza' astfel:
![]() (7.25)
(7.25)
Pentru o reglare proportionala, calculul din algoritmul de viteza este aufwendiger ca cel din algoritmul de situare. Functia de transmitere pentru algoritmul de situare a reglarii proportionale este:
 (7.26)
(7.26)
La utilizarea de pana acum a reglarii proportionale s-a acceptat ca este suficient pentru o reglare daca marimea de comanda se calculeaza proportional cu eroarea de reglare. Aceasta nu este intotdeauna valabil. Atunci cand eroarea de reglare este foarte mare sau ea se modifica constant sub influente externe, se utilizeaza alte metode de reglare.
In loc de introducerea limitarii marimii necesare (tinta) din bucla de reglare, se poate alege atat de mic factorul de amplificare K, incat o eroare de reglare oarecare nu atinge de la sine valoarea limita a marimii tinta. Aceasta prezinta avantajul ca in apropierea starii tinta, o valoare mica a erorii de reglare, nu conduce imediat la o valoare mare a marimii de comanda.
Aceasta strategie conduce pe de alta parte la faptul ca timpul de atingere a starii tinta prin eroarea de reglare devine prea mare, adica se situeaza peste o valoare maximala a timpului de reglare prescris. In plus pot aparea dificultati ca eroarea de reglare sa creasca continuu prin influenta externa.
Din exemplul anterior, robotul din fata se deplaseaza incet inainte. Se poate ca partea proportionala sa fie aleasa prea mica. Mobilul urmaritor nu atinge punctul de referinta, ci distanta dintre vehicule se mareste incet.
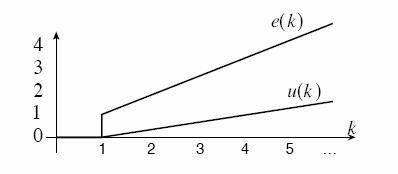
Fig. 7.9 Variatia continua a marimii de comanda sub valoarea abaterii reglarii
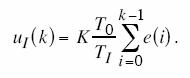
In acest caz se poate ca factorul de amplificare sa fie marit artificial prin termenul de integrare. In acest scop se va comuta pe un termen de reglare I. Reglarea I integreaza constant eroarea de reglare si se produce un termen proportional-integral:
 (7.27)
(7.27)
Constanta TI se denumeste, dupa DIN 19226, timp post-situare sau timp de integrare. Cu cat eroarea de reglare se mentine un timp mai indelungat, cu atat mai mare va fi termenul de integrare.
Cu referire la exemplul de mai sus, vehiculul din spate va accelera incet si constant, pana se atinge punctul de referinta. La atingerea acestuia trebuie din nou suma ca prin integrarile ulterioare termenul I sa se reduca. Din acest motiv nu este indicat ca termenul integral sa fie lasat sa influenteze reglarea un timp indelungat, pentru aceleasi valori ale erorii de reglare. O alta posibilitate este ca integrarea sa intervina numai daca marimea de comanda se situeaza sub o valoare limita (altfel termenul integral conduce la vibratii).
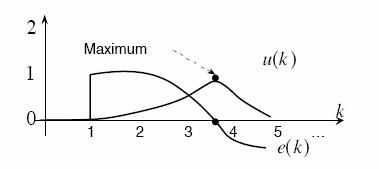
Fig. 7.10 La reglarea I, dupa atingerea valorii tinta, marimea de comanda scade imediat
Cele prezentate mai sus apartin algoritmului de situare.
Algoritmul de viteza este mai simplu:
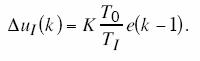 (7.28)
(7.28)
Variatia marimii de comanda este proportionala cu ultima abatere a reglarii. Termenul integral actioneaza cu intarziere si duce la vibratii mari, astfel incat trebuie gasita o modalitate de reactie rapida la abateri de reglare mari. Acesta se poate realiza printr-un termen diferential.
Termenul diferential creste rapid marimea de comanda la variatii ale erorii de reglare. Astfel, se poate reactiona rapid la un salt al erorii de reglare:
 (7.29)
(7.29)
Constanta TD este denumita, dupa DIN 19226, ca timp-inainte de oprire sau timp diferential.
Componenta de reglare D, spre deosebire de reglarea P sau I nu poate fi implementata individual, pentru ca la o valoare constanta a erorii aceasta nu poate reactiona (este nula).
Fig. 7.11 O componenta pur diferentiala nu poate compensa o valoare constanta a abaterii de reglare
O combinatie a P si I, cu o componenta D, intr-o asa numita reglare PID, este cunoscuta ca un sistem de reglare foarte eficace pentru reglarea proceselor liniare (de exemplu in cele mai multe actuatoare ale robotilor).
Pentru algoritmul de situare se utilizeaza urmatoarea formula:

si pentru algoritmul de viteza:
![]() (7.31)
(7.31)
cu parametrii
 (7.32)
(7.32)
Regulatorul PID de viteza este un regulator liniar nerecursiv, care produce, la o eroare de reglare sub forma de impuls, numai 3 valori nenule ale marimii de comanda Du(k)
Proiectarea reglarii liniare pentru timp de situare finiti
Descrierile de mai sus ale regulatoarelor si ale componentelor lor ajuta la proiectarea experimentala a reglarii. Daca este deja cunoscuta functia de transmitere, atunci se poate calcula o reglare optimala.
Daca procesul si reglarea sunt comutate impreuna, atunci rezulta functia de transmitere a comenzii actionarii, care descrie, cum marimea de reglare y (k ) influenteaza marimea de conducere w (k), este:
 (7.33)
(7.33)
Pentru o functie dorita de transmitere a conducerii, se obtine o functie de reglare:
 (7.34)
(7.34)
Astfel de reglari de compensare genereaza anumite conditii limita care sunt influentate de catre functia de transmitere a conducerii. O reglare de compensare deosebit de simpla este reglarea Deadbeat, care la o modificare treapta a marimii de conducere
w (k)=1 pentru k =
dupa un timp limita m, nu mai genereaza abateri intre marimea de conducere w (k) si de reglare y (k
y (k)= w( k)=1 pentru k>= m
si, de asemenea, nici o modificare a marimii de comanda
u (k)= u( m) pentru k>= m (7.37)
Dupa o deviatie simpla, se obtine o functie pentru reglarea Deadbeat:
 (7.38)
(7.38)
Parametrii de reglare se calculeaza direct din parametrii de proces. Asa de elegante si eficiente sunt aceste calcule, incat nu trebuie sa se observe ca acestea influenteaza decisiv procesul (in exemplul cu cele doua mobile). Mobilul urmaritor poate doar supraveghea cu senzorii procesul, nu sa-l cunoasca exact sau sa-l prevada. In multe cazuri sunt necesare: o continua evaluare a procesului, parametrii de reglare din marimile de masurare si o discreta schimbare intre diferitele tipuri de reglari (de exemplu P, PI, PD, PID). Aceste procedee sunt denumite reglari adaptive.
Conducerea prin comutarea perturbatiilor
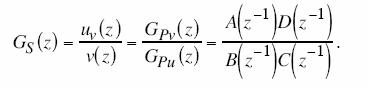
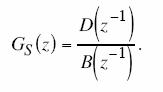
Asa cum a fost prezentat in figura 6.2, se poate ca modificarile controlate ale marimii de reglare y(k) prin influentele n(k) sa fie suprasolicitate de perturbatiile v(k). Daca perturbatia este masurabila, atunci se recomanda o comutare a marimii perturbatiei prin conducerea GS, care este comutata de reglarea GP pentru procesul neperturbat GPu. Aceasta este denumita comutarea ideala prin marimea perturbatiei.
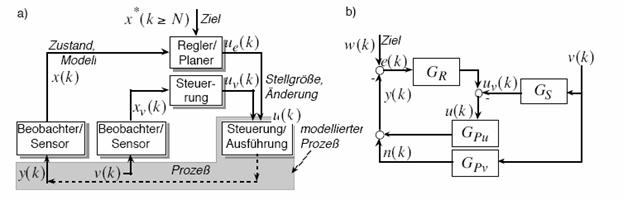
Fig. 7.12 Comutare prin marimea perturbatiei: a) in sistem, b) in model
Comutarea ideala prin marimea perturbatiei este limitata in utilizare, aceasta nu produce intarzieri, salturi, limitari sau instabilitate. Ea nu influenteaza reglarea liniara a procesului deja existenta, care, la randul ei nu trebuie sa regleze comutarea prin marimea perturbatiei Atentie la actionarea impreuna a celor doua marimi ue (k) si uv (k) d in fig. 7.12a.
Cu functia de transmitere pentru comportamentul perturbat:
 (7.39)
(7.39)
si conditia pentru comutarea ideala a marimii perturbatiei (conducere compensata):
GS (z) GPu( z) GPv z) (7.40)
rezulta:
 (7.41)
(7.41)
daca GPv (z) si GPu (z) sunt procese nerecursive cu raspuns limitat sub forma de impuls, adica,
A( z C (z-1 1, respectiv in general A( z-1 C( z-1) , atunci se poate calcula ecuatia de conducere din ambele raspunsuri impuls:
 (7.42)
(7.42)
Procese si reglari care interactioneaza intre ele
Daca spatiul de interactiune contine doi agenti independenti (cu reglari independente), atunci la momente nedeterminate de timp pot sa apara interactiuni reciproce intre acestia. Tipice sunt interactiunile de la nivelul procesului (fig. 7.13). Pentru o stapanire completa a interactiunilor la nivelul procesului se recomanda sa se utilizeze si interactiunile intre informatii, adica comunicare, cooperare, coordonare.
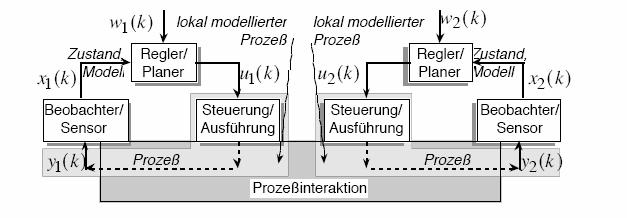
Fig. 7.13 Interactiuni la nivelul procesului
Exista mai multe posibilitati de cunoastere a interactiunilor intre unul sau mai multi agenti cu diferite atribute. Scenariul urmator prezinta urmatoarele: mai multe vehicule indeplinesc mai multe sarcini de deplasare in acelasi spatiu, intre doua puncte. Intr-un timp foarte scurt, acestea trebuie sa evite coliziuni cu peretii sau alte obstacole, respectiv alte vehicule. In acest scop regulatorul genereaza pentru fiecare mobil marimi de comanda pentru motoare, continand viteza si directia de deplasare dorite. Daca nu exista nici un perete sau obstacol in domeniul de activare al senzorilor de proximitate al vehiculului, atunci se va regla direct distanta pana la punctul tinta.
Pentru a stapani interactiunile, exista urmatoarele alternative:
Compensare locala: Fiecare vehicul incearca sa optimizeze distanta pana la toate obstacolele si pana la punctul tinta. Celelalte vehicule se vor modela in procesul de reglare ca perturbatii si miscarile acestora se vor compensa (fig. 7.14a).
Compensare cooperativa: Fiecare vehicul cauta sa regleze local distanta fata de obstacole si pana la punctul tinta. Celelalte mobile se vor modela ca perturbatii in procesul de reglare si miscarile lor locale se vor compensa local. Regulatorul verifica totusi, daca el perturba procesul celorlalte mobile in aceeasi masura in care este el este perturbat de catre acestea. Dupa reglarile reciproce prestabilite si determinate, se va realiza compensarea locala a perturbatiilor, astfel incat sa se perturbe alte procese cat mai putin posibil (fig. 7.14b).
Compensare prin transmiterea starilor: Fiecare vehicul cauta sa regleze local distanta fata de obstacole si pana la punctul tinta. Celelalte mobile se vor modela ca perturbatii in procesul de reglare si miscarile lor locale se vor compensa local. Regulatorul transmite marimile sale actuale de proces (tinta, starea actuala, marimle de comanda) la vehiculul pe care probabil il perturba. Imediat, regulatorul local al celuilalt vehicul utilizeaza informatiile primite pentru modelarea perturbatiilor (fig. 7.14c).
Interactiuni intre regulatoare: Dupa identificarea fiecarui proces individual, se va realiza un sistem de reglare general, bazat pe fiecare regulator, in scopul de se regla optimal procesul cuplat. (fig. 7.14d).
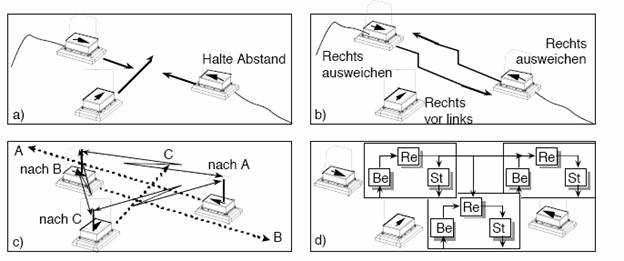
fig. 7.14 Procedee diferite controlarea interactiunilor: a) compensare locala, b) compensare cooperativa, c) compensare prin transmiterea starilor, d) interactiune intre regulatoare
Toate procedeele de compensare au ca scop minimizarea interactiunilor fizice reale (coliziuni). O coliziune, respectiv o depasire a distantei minime de siguranta se datoreaza unei instabilitati a regulatorului, pentru ca acesta trebuie sa garanteze un anumit comportament al vehiculului relativ la distanta fata de obstacole. Pentru evitarea coliziunilor, fiecare vehicul trebuie sa-si varieze viteza (franare, accelerare) sau sa-si modifice directia (sa aleaga alte succesiune de stari). In spatiul starilor proceselor locale exista totusi stari temporare, respectiv domenii sau rezerve, care conduc spre instabilitate si, de aceea, acestea nu trebuie luate in considerare de catre regulator. Aceste domenii nu pot fi finite cu functii liniare ale procesului modelat.
La compensarea locala se va supraveghea miscarea altor mobile, acestea se vor modela ca perturbatii in regulatorul local si apoi vor fi controlate prin conducerea de compensare ulterioara. Daca toate vehiculele utilizeaza aceleasi sau alte metode de compensare, atunci se obtine un sistem global haotic, a carui dinamica se controleaza numai prin reducerea vitezei.
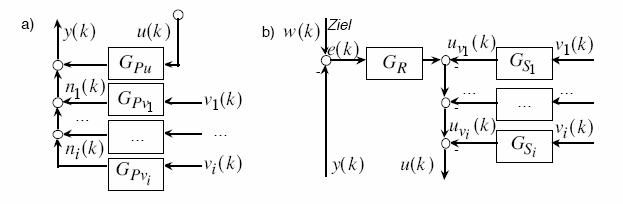
Fig. 7.15 a) Modelul procesului si b) modelul regulatorului pentru compensarea perturbatiilor intr-un vehicul din fig. 7.14
In fig. 7.15 se observa ca fiecare perturbatie a procesului se solicita una pe alta rapid si neliniar si se pot influenta reciproc astfel incat conducerea compensarii sa se anuleze reciproc, respectiv sa nu mai fie posibila comutarea nici unei perturbatii ideale.
La compensarea cooperativa, la o depasire a unui anumit prag de distanta, se va realiza mai intai o cuplare reala a proceselor reglate, respectiv o reglare a distantei intre vehicule. Pornind de aici se cauta ca la toate vehiculele, dupa o strategie prestabilita, aceste spatii sa se micsoreze, pentru ca procesele individuale sa se cupleze.
La compensarea prin transmiterea starilor, se vor evita erorile de interpretare a comportamentelor altor vehicule, pentru ca starile acestora nu sunt complet cunoscute, ci parti din aceste stari se vor transmite direct prin comunicare.
La interactiunea intre regulatoare, regulatoarele se vor cupla, pentru a se regla sistemul global. Acestea necesita o legatura fixa a sistemelor de reglare individuale cu un schimb de date continuu.
Alegerea tipurilor de compensare: locala, cooperativa, prin transmiterea starilor sau interactiunea intre regulatoare, pentru o strategie optimala de control a interactiunilor, depinde de multi factori. In sistemele multi agenti se recomanda, respectiv este necesar, ca sa se comute dinamic intre strategii.
Reglarea lanturilor modulare cinematice
Pe langa minimizarea interactiunilor prin respingere (coliziuni) prin compensare locala, se poate ca Verdrngung sa constituie o tinta de analizat. Se va exemplifica, la manipulatoarele mobile sau la constructia lanturilor cinematice modulare deschise (fig. 7.16a). Este important sa se utilizeze un sistem global de referinta in spatiul starilor, respectiv sisteme de referinta, astfel incat sa se calculeze metricile elementelor lantului in reprezentarea spatiului starilor. Cuplarea gradelor de libertate se poate analiza ca un sistem intreg prin cinematica directa sau inversa.
La manipulatoarele mobile, trebuie ca vehiculul sa preia sarcini de deplasare intre doua puncte oarecare si sa minimizeze coliziunile cu peretii, alte mobile sau obiecte mobile. Vehiculul transporta unul sau mai multe manipulatoare si influenteaza spatiul de lucru al acestora. Manipulatoarele pot, in paralel cu miscarile vehiculului, sa manipuleze scule sau obiecte, trebuie sa urmeze traiectorii programate si sa minimizeze coliziunile. In aceste configuratii sunt strans cuplate, de catre producator, prin legaturi cinematice, procesele individuale ale vehiculului si ale manipulatorului. Instantaneu, fiecare regulator are sarcini individuale tinta: punct/traiectorie tinta si minimizarea coliziunilor.
Vehiculul, ca baza a lantului cinematic- poate sa se miste, complet independent de manipulatoare, -atata timp cat nu contine nici un lant cinematic inchis. In schimb manipulatoarele trebuie sa cunoasca miscarea vehicului prin senzori (intern, extern, relativ) si sa o compenseze local in regulatorul lor (cuplare). Acestea sunt necesare pentru a garanta realizarea tintei manipulatoarelor si evitarea coliziunilor (fig. 7.16b). Compensarile sunt date de limitele naturale ale spatiilor de lucru ale manipulatoarelor. Manipulatoarele trebuie sa-si intrerupa atingerea tintelor, de indata ce se depaseste spatiul de lucru necesar pentru aceste tinte.
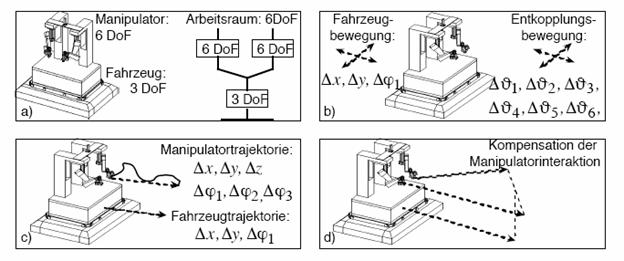
Fig. 7.16 a) lanturi cienmatice deschise, b) cuplarea miscarilor, c) extinderea spatiilor de lucru, d) compensarea interactiunilor din ramificare
Pe de alta parte, manipulatoarele pot sa-si mareasca real spatiul de lucru prin vehicul, daca acestea pot comanda regulatorul lor, respectiv sarcinile de deplasare se pot partaja. In acest caz vehiculul compenseaza marimile de comanda si limiteaza spatiul de lucru al manipulatorului (fig. 7.16c).
Daca vehiculul este utilizat pentru extinderea spatiului de lucru al unui manipulator, atunci se poate ca spatiul de lucru al celuilalt manipulator sa fie amenintat. drohen. Vehiculul, ca punct de ramificare al lantului cinematic, trebuie sa compenseze atat cat se poate schimburile dintre manipulatoare si sa ia o pozitie, care sa-i permita atat lui cat si manipulatoarelor sa-si urmareasca tintele. (fig. 7.16d).
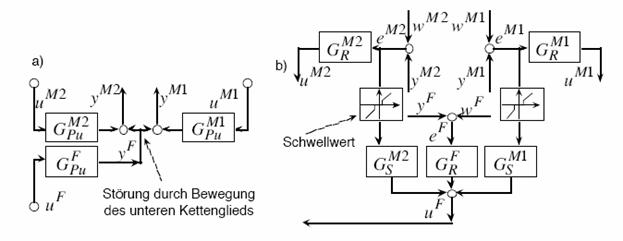
Fig. 7.17. a) Modelul procesului si b) modelul regulatorului pentru compensarea interactiunilor elementelor superioare din lantul cinematic deschis din fig. 7.16
Fig. 7.17 arata un model al procesului (a) si un model al regulatorului (b) pentru lantul cinematic deschis cu o ramificare. Elementul inferior cuprinde vehiculul (F) din fig. 7.16, si ambele elemente superioare, dupa ramificarea cinematica, cuprind manipulatoarele (M1, M2). La modelul procesului si al regulatorului se ia in considerare ca marimile de reglare sunt modelate in raport cu sistemul de coordonate globale (spatiul starilor). Modelul de reglare din fig. 7.17b arata, cum eroarea de reglare din elementul superior (manipulatoarele) este utilizata, ca valoare de prag sau ca o functie progresiva de cost cu prag, pentru conducerea miscarii elementului inferior. Daca se depaseste acest prag de catre un manipulator sau de catre ambele manipulatoare, atunci se deplaseaza vehiculul acolo unde este necesar pentru elementul superior.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1901
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved