| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Cunoscand ecuatiile de miscare x = x0 cos2t, y = y0 sin2t, sa se determine traiectoria, viteza, hodograful vitezei si acceleratia mobilului.
R. a) Eliminand timpul t intre cele doua ecuatii parametrice; se determina ecuatia
![]() .
.
Traiectoria este deci o elipsa, de semiaxe x0 si y0.(fig.1a).
b) Viteza va avea componentele
![]() ,
, ![]() .
.
Modulul vitezei este ![]() .
.
Vitezele punctului in pozitiile A, B, C si D sunt urmatoarele
vA = 2y0, vB = -2 x0, vC = -2 y0, vD = 2 x0.
c) Hodograful vitezei. Ecuatiile parametrice ale hodografului vitezei sunt:
![]() ,
, ![]() .
.
Eliminand parametrul t intre aceste ecuatii, rezulta ecuatia hodografului vitezei, care reprezinta o elipsa (fig.1b).
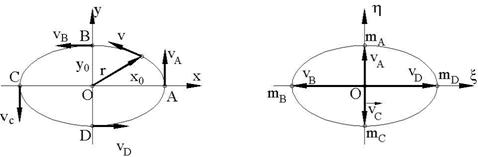
Fig.1a Fig.1b
d) Acceleratia are urmatoarele componente:
![]() ,
, ![]() .
.
si modulul
![]() .
.
Acceleratiile in punctele A, B, C si D sunt urmatoarele
![]()
![]()
![]()
![]() .
.
Un punct material porneste din repaus
si executa o miscare rectilinie. Stiind ca
acceleratia sa este data de γ
= ![]() sin
sin![]() , sa se determine:
, sa se determine:
a) ecuatiile de miscare
b) viteza maxima si viteza medie in intervalul (0, 2T)
c) viteza si spatiul parcurs dupa 2T secunde.
R. Ecuatia
diferentiala a miscarii mobilului este ![]() , din care rezulta prin integrare:
, din care rezulta prin integrare:
![]() ,
, ![]() .
.
Constantele de integrare C1, C2 se determina din conditiile initiale ale miscarii: t = 0, x = 0,
v = 0; rezulta ![]() , C2 =
0.
, C2 =
0.
a) Ecuatiile de miscare se scriu ![]() ,
, ![]() .
.
b) Viteza maxima corespunde momentului in
care se anuleaza acceleratia. Din a
= 0, se obtine t = 0, t = T.
La momentul initial t = 0,
viteza este nula iar la t = T viteza devine maxima ![]() .
.
Viteza medie pe intervalul de timp (0, 2T) este ![]() .
.
c) In momentul t
= 2T viteza va fi v1 =
0, iar spatiul parcurs ![]() .
.
Se cunosc ecuatiile de miscare ale unui mobil sub forma parametrica:
x = 1 - e-t, ![]() .
.
Sa se afle ecuatia traiectoriei, viteza, hodograful vitezei, acceleratia in momentele t = 0 si t = 1s.
R. Eliminand
parametrul t intre cele doua
ecuatii, se obtine ecuatia carteziana a traiectoriei sub
urmatoarea forma:  . Componentele vitezei sunt
. Componentele vitezei sunt
![]() ,
,
iar componentele acceleratiei ![]() .
.
In momentul initial viteza si acceleratia
au marimile ![]() ,
,
iar la t = 1s, au
aceeasi valoare numerica: ![]() .
.
Ecuatiile hodografului vitezei sunt ![]() , de unde rezulta
, de unde rezulta ![]() .
.
Cunoscand ecuatiile de miscare ale unui punct M in coordonate polare
r = 2 r0 cospt, q = pt,
sa se determine traiectoria, viteza si acceleratia mobilului.
R. Eliminand parametrul t intre cele doua ecuatii, se obtine r = 2r0 cosq
Viteza are componentele
![]() - 2r0 p sinpt,
- 2r0 p sinpt,
![]() 2r0 p cospt
2r0 p cospt
si modulul ![]() 2r0 p.
2r0 p.
Componentele acceleratiei sunt
![]() ,
, ![]() .
.
Marimea acceleratiei punctului M este ![]() 4r0 p2.
4r0 p2.
Un disc de raza R se rostogoleste fara alunecare pe un plan orizontal. Sa se studieze miscarea unui punct de pe periferia discului stiind ca centrul sau se deplaseaza uniform cu viteza constanta v0 (fig.5).
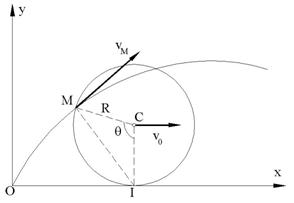
Fig.5
R. Deoarece discul executa rostogolire fara alunecare, putem scrie relatia
OI = arc![]() = Rq
= Rq
Coordonatele punctului M in functie de unghiul q exprima ecuatiile parametrice ale cicloidei
x = Rq - Rsinq = R(q - sinq ), y = R - Rcosq = R(1 - cosq
Din relatiile OI = v0t= arc![]() = Rq. rezulta
= Rq. rezulta ![]() . Inlocuind unghiul q, ecuatiile de mai sus devin
. Inlocuind unghiul q, ecuatiile de mai sus devin ![]() ,
, ![]() .
.
Componentele vitezei si acceleratiei sunt
![]() ,
, ![]()
![]() ,
,
de unde deducem si modulele ![]() .
.
Observatii
a) Deoarece IM = 2R![]() , viteza se poate
scrie sub forma
, viteza se poate
scrie sub forma ![]() .
.
b) Vectorul vM este perpendicular pe
vectorul ![]() . Intr-adevar, din expresiile
. Intr-adevar, din expresiile
![]() ,
, ![]()
rezulta ![]() .
.
c) In ce priveste viteza, punctul M se comporta ca si cand s-ar
roti uniform cu viteza unghiulara ![]() in jurul lui I.
in jurul lui I.
d) Acceleratia punctului M se mai
poate scrie sub forma ![]() .
.
e) Vectorul ![]() este coliniar cu vectorul
este coliniar cu vectorul ![]() . In ce priveste acceleratia, punctul M se comporta ca si cum s-ar
roti cu viteza unghiulara constanta in jurul lui C.
. In ce priveste acceleratia, punctul M se comporta ca si cum s-ar
roti cu viteza unghiulara constanta in jurul lui C.
Fie ecuatiile de miscare ale unui punct
M in coordonate polare r = bt,
![]() . Sa se determine
traiectoria, viteza si acceleratia punctului.
. Sa se determine
traiectoria, viteza si acceleratia punctului.
R. Traiectoria se
obtine eliminand parametrul t
intre cele doua ecuatii; rezulta ecuatia unei spirale hiperbolice
![]() .
.
Viteza are componentele ![]() , directia
, directia ![]() si intensitatea
si intensitatea ![]() .
.
Acceleratia are componentele
![]() ,
,
modulul si directia date de relatiile ![]() .
.
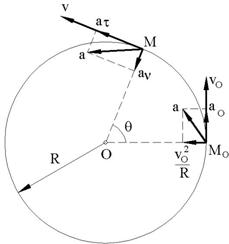
Un punct descrie un cerc de raza R intr-o miscare uniform
accelerata (fig.7). Stiind ca acceleratia
tangentiala este ![]() si ca la
momentul initial mobilul are viteza v0,
sa se determine:
si ca la
momentul initial mobilul are viteza v0,
sa se determine:
dupa cat timp unghiul dintre viteza si acceleratie devine a
unghiul la centrul q descris de raza
viteza si acceleratia mobilului in acest punct.
R. Miscarea fiind uniform accelerata, acceleratia tangentiala constanta este orientata in sensul vitezei.
Integrand ecuatia ![]() si tinand
seama de conditiile initiale t = 0, v = v0, a = 0, rezulta
si tinand
seama de conditiile initiale t = 0, v = v0, a = 0, rezulta  ,
, ![]() .
.
Unghiul a intre viteza si
acceleratie este dat de relatia ![]() .
.
|
|
In
pozitia acceleratia tangentiala |
|
Fig.7 |
Un mobil este lansat orizontal cu viteza initiala v0 de la inaltimea h. Sa se determine:
traiectoria mobilului
viteza cu care atinge solul
unghiul de atac al mobilului
pozitia punctului lovit (fig.8).
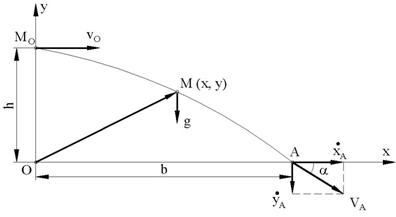
Fig.8
R. Acceleratia
punctului este egala cu acceleratia gravitationala![]() , de unde rezulta ecuatiile diferentiale
, de unde rezulta ecuatiile diferentiale ![]() cu integralele
urmatoare
cu integralele
urmatoare
![]() ,
, ![]() .
.
Cu conditiile initiale: t = 0, x = 0, y = h,![]() , se determina constantele
, se determina constantele
![]() .
.
Eliminand timpul t intre
primele doua ecuatii parametrice ![]() ,
, ![]() , se obtine ecuatia traiectoriei
, se obtine ecuatia traiectoriei![]() , adica o parabola simetrica fata de
Oy.
, adica o parabola simetrica fata de
Oy.
In A mobilul are abscisa egala cu bataia ![]() . Stiind timpul
. Stiind timpul![]() de coborare in A, se determina imediat
componentele vitezei
de coborare in A, se determina imediat
componentele vitezei ![]() , intensitatea
, intensitatea ![]() si unghiul de
atac
si unghiul de
atac![]() din relatia
din relatia  .
.
O bara rectilinie OA se roteste in jurul
extremitatii fixe O cu
viteza unghiulara constanta![]() . De-a lungul barei aluneca o piesa cu viteza v. Sa se determine ecuatia
traiectoriei, viteza absoluta, acceleratia absoluta, viteza
relativa si acceleratia relativa a piesei, daca viteza
este: a) constanta si egala cu
. De-a lungul barei aluneca o piesa cu viteza v. Sa se determine ecuatia
traiectoriei, viteza absoluta, acceleratia absoluta, viteza
relativa si acceleratia relativa a piesei, daca viteza
este: a) constanta si egala cu![]() ; b) proportionala cu distanta mobilului la axa
de rotatie. La momentul initial t
= 0 bara este orizontala, iar piesa se afla la distanta
; b) proportionala cu distanta mobilului la axa
de rotatie. La momentul initial t
= 0 bara este orizontala, iar piesa se afla la distanta![]() de capatul barei (fig.9).
de capatul barei (fig.9).
R. a) In sistemul coordonatelor polare viteza absoluta a piesei are componentele
![]() .
.
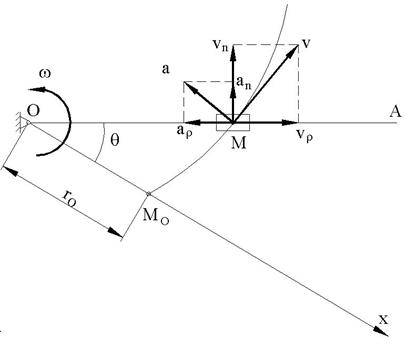
Fig.9
Din aceste ecuatii rezulta ![]() . Conditiile initiale dau constantele de integrare
. Conditiile initiale dau constantele de integrare ![]() . Din ecuatiile parametrice
. Din ecuatiile parametrice ![]() se deduce ecuatia
polara a traiectoriei
se deduce ecuatia
polara a traiectoriei![]() , adica spirala lui Arhimede.
, adica spirala lui Arhimede.
Componentele vitezei in coordonate polare
![]()
furnizeaza modulul![]() .
.
Acceleratia va avea componentele
![]() ,
, ![]()
si intensitatea ![]() .
.
In timpul miscarii relative pe bara, punctul are viteza ![]() si acceleratia
si acceleratia ![]() .
.
b) Daca piesa are o viteza relativa
care este proportionala cu distanta mobilului la axa de
rotatie, atunci putem scrie ![]() , de unde rezulta
, de unde rezulta ![]() .
.
Introducand apoi constanta de integrare ![]() , se obtine solutia ecuatiei
, se obtine solutia ecuatiei ![]() . Pe de alta parte, din
. Pe de alta parte, din ![]() rezulta
rezulta ![]() . Eliminand timpul intre cele doua ecuatii
parametrice, deducem ecuatia polara a traiectoriei
. Eliminand timpul intre cele doua ecuatii
parametrice, deducem ecuatia polara a traiectoriei ![]() , adica o spirala logaritmica.
, adica o spirala logaritmica.
Componentele vitezei si acceleratiei absolute sunt date de relatiile
![]()
![]() ,
,
de unde se deduc imediat urmatoarele intensitati
![]()
![]() .
.
Viteza si acceleratia relativa au expresiile
![]() ,
, ![]() .
.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3435
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved
 , viteza
, viteza , acceleratia normala
, acceleratia normala