| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
SISTEMUL DE ORIENTARE
Sistemele de orientare (S.O.) sunt realizate in diferite variante structurale si constructive, dispunand de cel putin trei grade de libertate proprii, care constau de regula in miscari de rotatie in raport cu axele sistemului cartezian mobil cu originea in punctual characteristic P al mecanismului de pozitionare (M.P.).
Elementele cinematice din componenta SO sunt de regula rotile conice si cilindrice, rigide si elastice, bare si cabluri flexibile. Actionarea SO se realizeaza practic cu motoare rotative (electrice si hidraulice) sau cu motoare translante de tip hidraulic, folosindu-se ca transmisii reductoare melcate sau armonice.
Actionarea SO poate fi inclusa in elementele apropiate de baza robotului sau poate fi plasata la nivelul SO.
Solutiile utilizate pentru transmiterea miscarii sunt :
-transmiterea prin arbori coaxiali ;
-transmiterea prin arbori paraleli ;
-transmiterea prin mecanisme paralelogram ;
-transmiterea prin lanturi, benzi si cabluri.
In constructia robotilor industriali, se disting SO care realizeaza la elementele conduse miscari independente si miscari dependente.
Pentru robotul proiectat se alrgr un sistem de orientare cu doua miscari dependente.
Schema cinematica a SO este prezentata in figura .
Miscarea de rotatie, caracterizata de unghiul Өx (roll) se obtine cu ajutorul unei transmisii prin curea dintata.
Miscarea de rotatie definita prin unghiul Өy (pitch) se obtine cu acelasi tip de transmisie prin curea dintata si un angrenaj conic ortogonal.
DETERMINAREA MASELOR SI MOMENTELOR DE INERTIE PENTRU FIECARE COMPONENTA ORGANOLOGICA IN PARTE
Determinarea momentelor de inertie
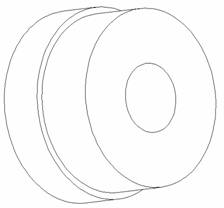
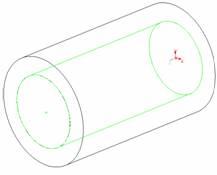
a) Pentru obiectul manipulat
 Se
cunosc :
Se
cunosc :
- m=10 Kg
D=161 mm
d=150 mm
L=93 mm
V1= 1505206.16 [mm3]
Jx1=0.28860633 [Kg*m2]
Jy1=0.28860633 [Kg*m2]
Jz1=0.40579535 [Kg*m2]
b) Pentru bacuri
Se cunosc:
- L = 120 [mm]
- l = 90 [mm]
- h = 50 [mm]
 m2=
3.6349 [Kg]
m2=
3.6349 [Kg]
V2= 466020 [mm3]
Jx2= 0.00321 [Kg*m2]
Jy2= 0.005119 [Kg*m2]
Jz2= 0.0068155 [Kg*m2]
c)
 Pentru
elementul port-bac
Pentru
elementul port-bac
Se cunosc :
- L = 125 [mm]
- l = 90 [mm]
- h = 20 [mm]
m3=1.766 [Kg]
V3=225000 [mm3]
Jx3=0.00125 [Kg*m2]
Jy3=0.00349 [Kg*m2]
Jz3=0.00235 [Kg*m2]
 d) Pentru elementele de tip bucsa
d) Pentru elementele de tip bucsa
Se cunosc :
- L = 90 [mm]
- l = 30 [mm]
- h = 60 [mm]
m4=1.271 [Kg]
V4= 162 000 [mm3]
Jx4= 0.00047688 [Kg*m2]
Jy4= 0.00095377 [Kg*m2]
Jz4= [Kg*m2]
e) Pentru elemental de tip tija pe care culiseaza bucsele cu bile
 Se
cunosc :
Se
cunosc :
- L = 300 [mm]
- Ф = 20 [mm]
m5= 0.739 [Kg]
V5= 94247.78 [mm3]
Jx5= 0.005567334 [Kg*m2]
Jy5= 0.005567334 [Kg*m2]
Jz5= 0.000036992 [Kg*m2]
f) Pentru elemental format din doua eclise si doua bolturi
 Se
cunosc :
Se
cunosc :
- L = 82 [mm]
- l = 60 [mm]
- h = 60 [mm]
- grosimea = 18.5 [mm]
m6= 0.499 [Kg]
V6= 63690 [mm3]
Jx6= 0.000216055[ Kg*m2]
Jy6= 0.000437256 [Kg*m2]
Jz6= 0.000612981 [Kg*m2]
g)
 Pentru
peretii carcasei
Pentru
peretii carcasei
Se cunosc :
- L = 165 [mm]
- l = 129 [mm]
- h = 15 [mm]
m7= 2.506 [Kg]
V7= 319275 [mm3]
Jx7= 0.003522616[ Kg*m2]
Jy7= 0.009161811 [Kg*m2]
Jz7= 0.005733181 [Kg*m2]
h) Pentru elemental cuprins intre eclise si tija MHL
Se cunosc :
 -
L = 90 [mm]
-
L = 90 [mm]
- l = 60 [mm]
- h = 22 [mm]
m8= 0.932[Kg]
V8= 118800 [mm3]
Jx8= 0.000317388 [Kg*m2]
Jy8= 0.000909265 [Kg*m2]
Jz8= 0.000667105 [Kg*m2]
i) Pentru peretele carcasei ce asambleaza MHL
 Se
cunosc :
Se
cunosc :
- L = 285 [mm]
- l = 129 [mm]
- h = 15 [mm]
m9= 4.329 [Kg]
V9 [mm3]
Jx9 [Kg*m2]
Jy9 0.03530580 [Kg*m2]
Jz9 0 02938362 [Kg*m2]
J) Pentru elemental de tip flans ace asambleaza MHL de sistemul de prehensiune
Se cunosc :
 - L = 20 [mm]
- L = 20 [mm]
- Ф = 87 [mm]
m10= 0.933 [Kg]
V10= mm3]
Jx10= 0.000472626 [Kg*m2]
Jy10= 0.000472626 [Kg*m2]
Jz10= 0.000883032 [Kg*m2]
k) Pentru elemental de tip flans ace asambleaza MHL cu sistemul de orientare
Se cunosc :
 - L = 19 [mm]
- L = 19 [mm]
- Ф = 87 [mm]
m11= 0.886 [Kg]
V11= 112948 [mm3]
Jx11= 0.000446113 [Kg*m2]
Jy11= 0.000446113 [Kg*m2]
Jz11= 0.000838880 [Kg*m2]
l) Pentru elemental de tip piston luat in calcul impreuna cu bucata din flansa ce intra in carcasa
Se cunosc :
 - L = 51 [mm]
- L = 51 [mm]
- Ф = 34 [mm]
m12= 0.363 [Kg]
V12 [mm3]
Jx12=
0.000105047 [Kg*m2]![]()
Jy12= 0.000105047 [Kg*m2]
Jz12=
0.000052523 [Kg*m2]![]()
 m) Pentru
elemental de tip opritor al pistonului MHL
m) Pentru
elemental de tip opritor al pistonului MHL
Se cunosc :
- L = 14 [mm]
- Ф = 34 [mm]
m13= 0.0997 [Kg]
V13= 12710.88 [mm3]
Jx13=
0.000008838 [Kg*m2]![]()
Jy13= 0.000008838 [Kg*m2]
Jz13=
0.000014418 [Kg*m2]![]()
 n) Pentru elemental de tip tija
al MHL (bucata neluata in calcul)
n) Pentru elemental de tip tija
al MHL (bucata neluata in calcul)
Se cunosc :
- L = 45 [mm]
- = 10 [mm]
m14= 0.027 [Kg]
V14= 3534.29 [mm3]
Jx14=
0.000004855 [Kg*m2]![]()
Jy14= 0.000004855 [Kg*m2]
 Jz14= 0.000000346 [Kg*m2]
Jz14= 0.000000346 [Kg*m2]![]()
o) Pentru elemental de tip carcasa al MHL
Se cunosc :
- L = 80 [mm]
- Ф = 51 [mm]
- grosimea = 8.5 [mm]
m15= 0.712 [Kg]
V15= 90792.03 [mm3]
Jx15=
0.00054747 [Kg*m2]![]()
Jy15= 0.00054747 [Kg*m2]
Jz15= 0.00033470 [Kg*m2]![]()
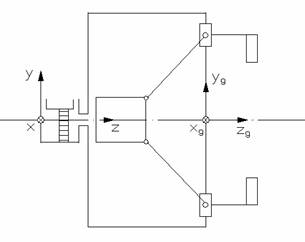
2 Calculul sistemului de prehensiune si precizia pozitiei centrului de greutate ale tuturor componentelor organologice ale gripper-ului
Calculul momentelor de inertie reduse pe cele 3 axe
Sistemul de axe de coordonate de referinta este reprezentat pe schema de mai jos:
Masa sistemului de prehensiune :
mSpreh.=2m2 + 2m3 + 2m4 + 2m5 + 2m6 + 2m7 + m8 + m9 + m10 + m11 + m12 + m13 + m14 + m15=33.11[Kg]
Masa totala a sistemului de prehensiune impreuna cu obiectul manipulat :
mSPrehTot=mSP + mObiect= 44.11 [Kg]
Distributia spatiala a tuturor componentelor organologice ale sistemului de prehensiune si a obiectului manipulat
-coordonatele centrului de greutate :
a) pentru obiectul manipulat
m1= 11 [Kg]
xg1= 387.5 [mm] yg1= 0 [mm] zg1= 0 [mm]
dx1= ![]() = 0 [mm]
= 0 [mm]
dy1= ![]() = 387.5 [mm]
= 387.5 [mm]
dz1= ![]() =387.5 [mm]
=387.5 [mm]
b ) pentru bacuri
m2= 3.6349 [Kg]
xg2= 387.5 [mm] yg2= 0 [mm] zg2= 79 [mm]
dx2=![]() =
79 [mm]
=
79 [mm]
dy2=![]() =
395.47 [mm]
=
395.47 [mm]
dz2=![]() [mm]
[mm]
c ) pentru elemental port bac
m3= 1.766 [Kg]
xg3 365 [mm] yg3= 0 [mm] zg3= 107.5 [mm]
dx3=![]() =107.5
[mm]
=107.5
[mm]
dy3=![]() =
380.5[mm]
=
380.5[mm]
dz3=![]() =
365 [mm]
=
365 [mm]
d ) pentru elemental de tip bucsa
m4= 1.271 [Kg]
xg4= 290 [mm] yg4= 0 [mm] zg4= 79 [mm]
dx4=![]() =
79 [mm]
=
79 [mm]
dy4=![]() =
300 [mm]
=
300 [mm]
dz4=![]() =
290 [mm]
=
290 [mm]
e) pentru elementul de tip tija pe care culiseaza bucsele cu bile
m5= 0.739 [Kg]
xg5= 290 [mm] yg5= 15 [mm] zg5= 0 [mm]
dx5=![]() = 15 [mm]
= 15 [mm]
dy5=![]() = 290 [mm]
= 290 [mm]
dz5=![]() = 290.38 [mm
= 290.38 [mm
f ) pentru elementul format din doua eclise si doua bolturi
m6= 0.499678 [Kg]
xg6= 242[mm] yg6= 0 [mm] zg6= 69 [mm]
dx6=![]() =
69 [mm]
=
69 [mm]
dy6=![]() =
251.64 [mm]
=
251.64 [mm]
dz6=![]() =
242 [mm]
=
242 [mm]
g) pentru pereti carcasei laterale
m7= 2.506 [Kg]
xg7= 232.5 [mm] yg7= 0 [mm] zg7= 135 [mm]
dx7=![]() = 135 [mm]
= 135 [mm]
dy7=![]() = 268.85 [mm]
= 268.85 [mm]
dz7=![]() = 232.5 [mm]
= 232.5 [mm]
h) pentru elementul cuprins intre eclisa si tija MHL
m8= 0.932 [Kg]
xg8= 225 [mm] yg8= 0 [mm] zg8= 0 [mm]
dx8=![]() =
0 [mm]
=
0 [mm]
dy8=![]() =
225 [mm]
=
225 [mm]
dz8=![]() =
225 [mm]
=
225 [mm]
i ) pentru peretele carcasei ce se asambleaza cu MHL
m9= 4.329 [Kg]
xg9= 141 [mm] yg9= 0 [mm] zg9= 0 [mm]
dx9=![]() =
0 [mm]
=
0 [mm]
dy9=![]() =
141 [mm]
=
141 [mm]
dz9=![]() =
141 [mm]
=
141 [mm]
j ) pentru elementul de tip flansa ce asambleaza MHL de sistemul de prehensiune
m10= 0.933 [Kg]
xg10= 126 [mm] yg10= 0 [mm] zg10= 0 [mm]
dx10=![]() =
0 [mm]
=
0 [mm]
dy10=![]() =
126 [mm]
=
126 [mm]
dz10=![]() =
126[mm]
=
126[mm]
k ) pentru elementul de tip flansa ce asambleaza MHL cu sistemul de orientare
m11= 0.886 [Kg]
xg11= 9.5 [mm] yg11=0 [mm] zg11= 0 [mm]
dx11=![]() =
0 [mm]
=
0 [mm]
dy11=![]() =
9.5 [mm]
=
9.5 [mm]
dz11=![]() =
9.5 [mm]
=
9.5 [mm]
l ) pentru elementul de tip piston luat in calcul impreuna cu bucata din flansa ce intra in carcasa
m12= 0.363 [Kg]
xg12=109.5 [mm] yg12=0 [mm] zg12= 0 [mm]
dx12=![]() = 0 [mm]
= 0 [mm]
dy12=![]() = 109.5 [mm]
= 109.5 [mm]
dz12=![]() = 109.5 [mm]
= 109.5 [mm]
m ) pentru elementul de tip opritor al pistonului MHL
m13= 0.099 [Kg]
xg13= 26 [mm] yg13= 0 [mm] zg13= 0 [mm]
dx13=![]() =
0 [mm]
=
0 [mm]
dy13=![]() =
26 [mm]
=
26 [mm]
dz13=![]() =
26 [mm]
=
26 [mm]
n ) pentru elementul de tip tija al MHL (bucata ramasa)
m14= 0.0277 [Kg]
xg14= 124.5 [mm] yg14= 0 [mm] zg14= 0 [mm]
dx14=![]() = 0 [mm]
= 0 [mm]
dy14=![]() = 124.5 [mm]
= 124.5 [mm]
dz14=![]() = 124.5[mm]
= 124.5[mm]
o ) pentru elementul de tip carcasa al MHL
m15= 0.712 [Kg]
xg15= 59 [mm] yg15=0 [mm] zg15= 0 [mm]
dx15=![]() =
0 [mm]
=
0 [mm]
dy15=![]() = 59 [mm]
= 59 [mm]
dz15=![]() = 59 [mm]
= 59 [mm]
Calculul centrului de greutate al ansamblului sistem de prehensiune-obiect manipulat
zg J![]() =J
=J![]()
![]()
Calculul momentului de inertie redus pe axa OY pe care se realizeaza miscarea ROLL
J![]() = 1.34 [kg*m
= 1.34 [kg*m![]()
M![]() = J
= J![]() *
*![]() = 7.25 [N*m]
= 7.25 [N*m]
![]()
![]()
Calculul si alegerea principalelor componente ce alcatuiesc sistemul de orientare
Calculul si alegerea componentelor organologice principale ce alcatuiesc axa ROLL de rotatie in cadrul SO
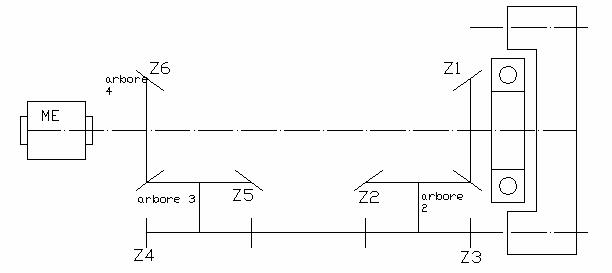
Schema cinematica structurala a axei de mizcare ROLL
Se alege din
catalogul
Reductorul armonic are urmatoarele caracteristici tehnice:
-turatia maxima : nRA= 3500 rotatii/min
-raportul de transmitere : iRA = 120
- momentul maxim la care
functioneaza : Mmax = 40 [N*m] >M![]()
-momentul de inertie aproximativ : JRA = 1.44 [Kg*m2]
-momentul de pornire fara sarcina ( mers in gol ) : MPfS = 3.2 [N*m]
Predimensionare arborelui 1 se face din solicitarea de torsiune:
darb.1=
Aleg constructiv darb.1=30mm
Materialul din care se fabrica
arborele 1 este OLC45 , pentru care ![]() =(15...30) [N/mm2]
=(15...30) [N/mm2]
![]() Aleg
Aleg ![]() =30 [N/mm2]
=30 [N/mm2]
Momentul de torsiune se calculeaza cu relatia:
![]() Mt=
Mt=![]() J
J![]() + Jflansa + JRA]*
+ Jflansa + JRA]*![]() *
*![]() =
60,875 [N*mm]
=
60,875 [N*mm]
Calculul momentului de inertie al flansei ce leaga sistemul de prehensiune de sistemul de orientare
mflans= 3.9517 [kg]
Jx=Jy= [kg*m2]
Jz= [kg*m2]
Alegerea si calculul geometric al rotilor
dintate conice cu dantura curba in arc de cerc cu inaltime
Se cunosc :
- raportul de transmitere:
![]()
![]()
- numarul maxim de dinti ai rotii conduse zR =26 dinti
- numarul maxim de dinti ai pinionului zP=26 dinti
- modulul la diametrul mare al rotilor m=1.5 mm
- unghiul de inclinare al spirei dintelui pe cercul mediu β= 35
1) unghiul conului de divizare:
tg φp = zP/zR = 45
φR = δ - φp = 90 - 45 = 45
2) Diametrul cercului de divizare
dp = m * zp = 1.2 * 26 = 39 mm
dR = m * zR = 1.2 * 26 = 39 mm
3) Lungimea generatoarei conului de divizare
Le = dp/2sin φp = dR/2sin φR= 27.58 mm
4) Lungimea dintelui in lungul generatoarei (latimea danturii)
Kb 0.2 0.3) aleg Kb =0.29
B = Kb * Le = 8 mm
5) Lungimea generatoarei medii pe conul de divizare:
L = Le - 0.5b = 23.58 mm
6) Modulul normal in punctul mediu al dintelui
mn=m*λ'ecosβ = 1.0504 mm
7) Inaltimea capului dintelui
hap= ( fn + εn )* mn = 1.0504 mm
unde: εn = 0
fn= 1
8) Inaltimea piciorului dintelui
hbp= ( 2 fn + c'n )* mn - hap = 1.313 mm
c'n
hbR= ( 2 fn + c'n )* mn - haR = 1.313 mm
9) Diametrul exterior
dep= dp + 2 hap * sinφp = 40.4905 mm
deR= dR + 2 haR * sin R = 40.4905 mm
10) Distanta de la planul cercului de divizare la varful conului de divizare.
Vp
= VR = dR /2 = dp/2 = 19.5 mm![]()
11) Distanta de la planul cercului de divizare la suprafata de reazem
Se aleg constructiv:
![]()
![]()
![]()
![]()
12) Distanta de la suprafata de reazem la varful dintelui
B'p = A'p + hap * sin p = 6.743 mm
B'R = A'R + haR * sin R = 30.743 mm
13) Latimea corpului rotii in sens axial
Bp = B'p + B*cosφp = 12.3998 mm
BR = B'R + B*cosφR = 36.3998 mm
14) Distanta de la varful conului de divizare la suprafata de reazem
Ap = A'p + 0.5 * dp * ctgφp = 24.5 mm
AR = A'R + 0.5 * dR * ctg R = 49.5 mm
15) Diametrul capului port-cutit :
Dcpc=3.5''
![]()
![]()
![]()
16) Numarul de dinti ai rotii plane :
![]() dinti
dinti
17) Dimensiunea dinte si gol in punctul mediu in sectiunea normala pe roata plana
Snp - grosimea dinte-pinion (pe roata plana)
Sgnp - latimea gol-pinion (pe roata plana)
metoda taiere pinion - fixed setting -
![]()
![]()
![]() Snp = 1.64996 mm
Snp = 1.64996 mm ![]()
εn = 0 τn = 0 αn = 20
Sgnr - latime gol-roata (pe roata plana)
Snr - grosimea dinte-roata
Metoda de taiere roata -spread blade -
![]()
![]()
18) Dimensiunea dinte si gol in punctul mediu in sectiunea frontala pe roata plana
Sp - grosimea dinte-pinion (pe roata plana)
Sgr - latimea gol-roata (pe roata plana)
![]()
![]()
Sr - grosimea dinte-roata (pe roata plana)
Sgr - latimea gol-pinion (pe roata plana)
![]()
![]()
19) Dimensiunea dinte si gol in sectiune normala la diametrul exterior al rotii plane
Snep - grosimea dinte pinion in plan normal la exterior
Sgner - latimea gol roata in plan normal la exterior
metoda de taiere pinion - fixed setting -
![]()
![]()
Sher - grosimea dinte roata in plan normal la exterior
Sghep - latimea gol pinion in plan normal la exterior
![]()
![]()
![]() β = 35
β = 35
![]() Sner = 2.2133 mm
Sner = 2.2133 mm
20) Dimensiunea dinte si gol la exterior in plan frontal la roata plana
Sep- grosimea dinte pinion in plan frontal la exterior
Sger- latimea gol roata in plan frontal la exterior
![]() Sep = 2.0142 mm
Sep = 2.0142 mm
Ser - grosimea dinte roata in plan frontal la exterior
Sgep - latimea gol pinion in plan frontal la exterior
![]() Ser = 2.6994 mm
Ser = 2.6994 mm
21) Dimensionarea dinte si gol in sectiune normala la diametrul interior al rotii plane
Snip - grosimea dinte pinion in plan normal la interior
Sgnir - latime gol roata in plan normal la interior
metoda de taiere pinion - fixed setting -
![]()
![]()
Shir - grosimea dintre roata in plan normal la interior
Sghip - latimea gol pinion in plan normal la interior
![]()
![]()
![]() λi =
0.8303
λi =
0.8303
![]() βi = 36.26
βi = 36.26
![]() Snir = 1.04712 mm
Snir = 1.04712 mm
22) Dimensiunea dinte si gol la interior in plan frontal la roata plana:
Sip-latime gol roata in plan frontal la interior;
Sgir-latime gol roata in plan frontal la interior;
![]() Sip = 2.0462 mm
Sip = 2.0462 mm ![]()
Sir-grosimea dinte roata in plan frontal la interior;
Sgip-latime gol pinion in plan frontal la interior;
![]() Sir = 1.2986 mm
Sir = 1.2986 mm ![]()
23) Grosimea dintelui pe coarda de grosime constanta in punctul mediu al dintelui (sectiune normala)
![]() S'nxp = 1.4569 mm
S'nxp = 1.4569 mm
![]() S'nxr = 1.4569 mm
S'nxr = 1.4569 mm
24) Inaltimea la coarda constanta:
![]() h'nxp = 0.7856 mm
h'nxp = 0.7856 mm
![]() h'nxr = 0.7856 mm
h'nxr = 0.7856 mm
25) Verificarea la ascutire pentru sistemul de prelucrare 'spread blade' roata si 'fixed setting pinion', verificarea se face la roata
![]() di = 39.16 mm
di = 39.16 mm
![]() dei = 41.26 mm
dei = 41.26 mm
![]() α0s = 24.29
α0s = 24.29
![]()
![]() αis = 30.099
αis = 30.099
![]()
Sir = 1.2986 ![]() →
0.3561511≥ ; 0.5252 )
→
0.3561511≥ ; 0.5252 )
Tesirea la varf a danturii este necesara.
Calculul de predimensionare al arborelui 2:
Arborele 2 se predimensioneaza din solicitarea de torsiune:
![]() darb.2=
3
darb.2=
3 Aleg constructiv darb.2
=12 [mm]
Aleg constructiv darb.2
=12 [mm]
Materialul din care
se fabrica arborele 2 este OLC45 , pentru care ![]() =(15...30) [N/mm2]
=(15...30) [N/mm2]
![]() Aleg
Aleg ![]() =30 [N/mm2]
=30 [N/mm2]
Momentul de torsiune se calculeaza cu relatia:
Mt2=![]()
![]()
![]() = 60.422 [ N*mm]
= 60.422 [ N*mm]

Calculul momentului de inertie al arborelui 1:
Se cunosc :
- L = 80 [mm]
- Ф = 12 [mm]
marb.1= 0.071 [kg]
Jx = 0.000038519 [kg*m2]
Calculul momentului de inertie al rotii z1:
Se cunosc :
- L = 12.39 [mm]
- D = 39 [mm]
mz1=0.115 [kg]
Jx = 0.0000124 [kg*m2]
![]()
![]()
![]()
![]() = 0.03675 [ rad/sec]
= 0.03675 [ rad/sec]
Calculul si alegerea curelei si a rotilor de curea
P → puterea nominala
P = M*n/9550 = 0.1898 [ KW]
In functie de rotatie si putere se alege tipul curelei XL
raportul de transmitere al transmisiei prin curea este: i34 = 1
rotile de curea au acelasi numar de caneluri: z3 = z4 = z
se alege din catalog 24XL037 cu z = 24 de tip 6F cu diametrul 38.40mm ; diamertul flanselor laterale = 48 mm ; latime W = 16.3 ; lungime L = 24.2mm ; diametrul H = 29 mm ; diametrul maxim al gaurii dmax = 16 mm
in conformitate cu aceste roti se allege cureaua dintata de tip 130XL cu zR = 65 dinti , latimea curelei standardizata este de 9.53 mm ; diametrul exterior pe roti este de 38.81 mm si distanta dintre centrele rotilor de curea a = 104.14 mm
Calculul de predimensionare al arborelui 3
Arborele 3 se predimensioneaza din solicitarea de torsiune :
darb3 = ![]()
Se alege constructiv darb3 = 12 mm
Materialul din care este confectionat : OLC45
τa = (15 ; 30) [N/mm2]
Mt3 = 
 [N*mm]
[N*mm]
Jz4 = Jz3 ; Jz5 = Jz2 ; Jarb3 = Jarb2 ; εarb3 = εarb4
Calculul momentului de inertie al rotii z2 ( se aproximeaza roata dintata cu un cilindru )
Se cunosc :
 - L = 36.39 [mm]
- L = 36.39 [mm]
- Ф = 39 [mm]
mz2 = 0.341 [Kg ]
Jx = 0.000070097 [Kg*m2]
 Calculul momentului de inertie al
arborelui 2 :
Calculul momentului de inertie al
arborelui 2 :
Se cunosc :
- L = 72 [mm]
- Ф = 12 [mm]
marb2 = 0.063 [Kg]
Jx = 0.000028189 [Kg*m2]
Calculul momentlui de inertie al roti z3 :
Se cunosc :
- L = 22.2 [mm]
- D = 45 [mm]
- d = 16 [mm]
mz3 = 0.179 [Kg]
Jx = 0.000063066 [Kg*m2]
Alegerea si calculul geometric al rotilor
dintate conice cu dantura curba in arc de cerc cu inaltime
Rotile dintate conice z5/z6 au aceleasi dimensiuni geometrice si aceleasi caracteristici construnctiv-functionale ca rotile conice din angrenajul z1/z2.
Calculul de predimensionare al arborelui 4
Arborele 4 se predimensioneaza din solicitarea de torsiune :
darb4 = 
Aleg construnctiv darb4 = 12 mm
Materialul din care este confectionat arborele 4 este OLC45
τa = 30 [N/mm2]
Mt4 =
Mt4 = 60.447 [N*mm]
Coordonatele centrelor de greutate ale tuturor componentelor organologice dispuse intre obiectul manipulat si axa de miscare PITCH
a ) pentru obiectul manipulat
m1= 11 [Kg]
xg1= 509.5 [mm] yg1= 0 [mm] zg1= 0 [mm]
dy1=
![]() = 509.5 [mm]
= 509.5 [mm]
b ) pentru bacuri
m2= 3.6349 [Kg]
xg2= 509.5 [mm] yg2= 0 [mm] zg2= 79 [mm]
dy2=![]() = 515.58 [mm]
= 515.58 [mm]
c ) pentru elemental port bac
m3= 1.766 [Kg]
xg3 487 [mm] yg3= 0 [mm] zg3= 107.5 [mm]
dy3=![]() = 498.723 [mm]
= 498.723 [mm]
d ) pentru elemental de tip bucsa
m4= 1.2636 [Kg]
xg4= 412 [mm] yg4= 0 [mm] zg4= 79 [mm]
dy4=![]() = 419.505 [mm]
= 419.505 [mm]
e ) pentru elementul de tip tija pe care culiseaza bucsele cu bile
m5= 0.7351 [Kg]
xg5 487 [mm] yg5= 0 [mm] zg5= 107.5 [mm]
dy5=![]() = 412 [mm]
= 412 [mm]
f ) pentru elementul format din doua eclise si doua bolturi
m6 = 0.499 [Kg]
xg6= 364 [mm] yg6= 0 [mm] zg6= 69 [mm]
dy6=![]() =
370.48 [m
=
370.48 [m
g ) pentru pereti carcasei laterale
m7 = 2.506 [Kg]
xg7= 354 [mm] yg7= 0 [mm] zg7= 135 [mm]
dy7=![]() = 379.33 [mm]
= 379.33 [mm]
h ) pentru elementul cuprins intre eclisa si tija MHL
m8 = 0.932[Kg]
xg8= 347 [mm] yg8= 0 [mm] zg8= 0 [mm]
dy8=![]() =
347 [mm]
=
347 [mm]
i ) pentru peretele carcasei ce se asambleaza cu MHL
m9 = 4.329 [Kg]
xg9= 263 [mm] yg9= 0 [mm] zg9= 0 [mm]
dy9=![]() =
263 [mm]
=
263 [mm]
j ) pentru elementul de tip flansa ce asambleaza MHL de sistemul de prehensiune
m10 = 0.933 [Kg]
xg10= 248 [mm] yg10= 0 [mm] zg10= 0 [mm]
dy10=![]() =248
[mm]
=248
[mm]
k ) pentru elementul de tip flansa ce asambleaza MHL cu sistemul de orientare
m11= 0.886 [Kg]
xg11=131.5 [mm] yg11=0 [mm] zg11= 0 [mm]
dy11=![]() =
131.5 [mm]
=
131.5 [mm]
l ) pentru elementul de tip piston luat in calcul impreuna cu bucata din flansa ce intra in carcasa
m12 = 0.363 [Kg]
xg12 = 231.5 [mm] yg12 = 0 [mm] zg12= 0 [mm]
dy12=![]() = 231.5 [mm]
= 231.5 [mm]
m ) pentru elementul de tip opritor al pistonului MHL
m13 = 0.097 [kg]
xg13 = 148 [mm] yg13= 0 [mm] zg13= 0 [mm]
dy13=![]() =
148 [mm]
=
148 [mm]
n ) pentru elementul de tip tija al MHL(bucata ramasa)
m14= 0.0277 [Kg]
xg14 = 246.5 [mm] yg14 = 0 [mm] zg14 = 0 [mm]
dy14=![]() = 246.5 [mm]
= 246.5 [mm]
o ) pentru elementul de tip carcasa al MHL
m15 = 0.712 [Kg]
xg15 = 181 [mm] yg15= 0 [mm] zg15= 0 [mm]
dy15 =![]() = 181 [mm]
= 181 [mm]
p ) pentru flansa sistemului de orientare
m16 = 3.951 [Kg]
zg16 = 105 [mm] yg16 = 0 [mm] zg16 = 0 [mm]
dy16 = ![]() =
105 [mm]
=
105 [mm]
Jy16 = 0.00386 [kg*m2]
r ) pentru arbore 1in cadrul SO
m17 = 0.0828 [Kg]
xg17 = 51 [mm] yg17= 0 [mm] zg17 [mm]
dy17 = ![]() =
51 [mm]
=
51 [mm]
Jy17=Jx17 = 0.000044905 [kg*m2]
s ) pentru carcasa ce acopera arboreal 1
m18= 0.664 [Kg]
xg18= 57.5 [mm] yg18= 0 [mm] zg18= 0 [mm]
dy18= ![]() = 57.5 [mm]
= 57.5 [mm]
Jy18 = 0.00026117 [kg*m2]
t ) pentru roata dintata z1
m19= 0.115 [Kg]
xg19= 20 [mm] yg19= 0 [mm] zg19= 0 [mm]
dy19= ![]() = 20 [mm]
= 20 [mm]
Jy19= 0.00002186 [kg*m2]
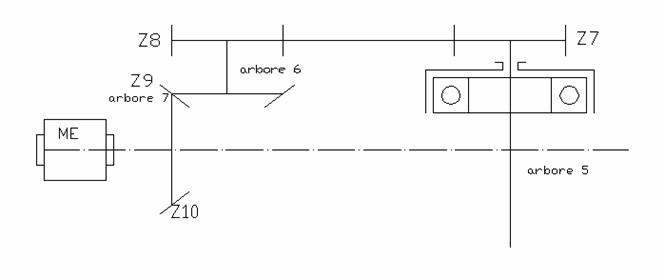
Calculul momentului de inertie redus pe axa Oy (axa de rotatie PITCH)
J![]() = J
= J![]() = (JYi + mi*d2yi)
= 11.31203 [ Kg * m2 ]
= (JYi + mi*d2yi)
= 11.31203 [ Kg * m2 ]
Calculul centrului de greutate al ansamblului sistem de prehensiune - componente organologice aflate inte obiectulmanipulat si axa e rotatie PITCH
( axa arborelui 5 )
mSpreh.tot = 54.057 [Kg]
xg = ![]() 413.24
[mm]
413.24
[mm]
![]() → moment datorat fortelor de inertie
→ moment datorat fortelor de inertie
![]() = 4.53 [grade/sec2]
= 4.53 [grade/sec2]
![]() 51.24 [N*m]
51.24 [N*m]
![]() → momentul
datorat fortelor gravitationale
→ momentul
datorat fortelor gravitationale
![]() = 235.33 [N*m]
= 235.33 [N*m]
![]() = 286.57 [N*m]
= 286.57 [N*m]
Se
alege din catalogul Harmonicul Drive reductorul armonic ce
corespunde valorii totale calculate a ![]() .
.
Aleg reductorul armonic simbolizat HDR spatiu 32.
Reductorul armonic are urmatoarele caracteristici tehnice:
-turatia maxima : nRA= 3500 rotatii/min
-raportul de transmitere : iRA = 100
- momentul maxim la care
functioneaza : Mmax = 298 [N*m]>M![]()
-momentul de inertie aproximativ : JRA = 2.87 [Kg*m2]
-momentul de pornire fara sarcina ( mers in gol ) : MPfS = 25 [N*m]
Calculul de predimensionare al arborelui 5
Arborele 5 se predimensioneaza din solicitarea de torsiune .
 7.86 [mm]
7.86 [mm]
Aleg constuuctiv darb5 = 12 [mm]
Materialul din care este confectionat arborele 5 este ONC 45
τa = (15 ;30) [ N/mm2] → aleg τa = 30 [N/mm2]
Mt5 =  = 2870.824 [N*mm]
= 2870.824 [N*mm]
Calculul si alegerea curelei si a rotilor de curea
Aleg cureaua si rotile de curea aceleasi cu cele alese in cazul miscarii ROLL
-rotile de curea : 24 X037
-curea dintata de tip : 130 XL
-momentul de inertie al rotilor este : Jz7/z8 = 0.00006843 [Kg*m2] ; Jy = Jx = Jz7/z8
Calculul de predimensionare al arborelui 6
Arborele 6 se predimensioneaza din solicitarea de torsiune
darb6 = 
Aleg constuuctiv darb6 = 12 [mm]
τa = (15 ;30) [N/mm2] → τa = 30 [N/mm2]
Materialul din care este confectionat arborele 6 este : OLC 45
Mt6 = 
Mt6 = 2865.77 [N*mm]
unde : ![]() = 0.0453 [rad/sec]
= 0.0453 [rad/sec]
Calculul momentului de inretie al arborelui 5
 Se cunosc :
Se cunosc :
- L = 156 [mm]
- = 12 [mm]
marb6 = 0.138 [Kg]
Jx = Jy = 0.000282122 [Kg/m2]
Alegerea si calculul geometric al rotilor
dintate conice cu dantura curba in arc de cerc cu inaltime
Se cunosc :
- raportul de transmitere:
i9-10 = ![]()
- numarul maxim de dinti ai rotii conduse zR = 38 dinti
- numarul maxim de dinti ai pinionului zP = 38 dinti
- modulul la diametrul mare al rotilor m =1.5 mm
- unghiul de inclinare al spirei dintelui pe cercul mediu β = 35
-unghiul dintre axele angrenajului : δ = 90
1) unghiul conului de divizare:
tg φp = zP/zR = 1
φR = δ - φp = 90 - 45 = 45
2) Diametrul cercului de divizare
dp = m * zp = 57 mm
dR = m * zR = 57 mm
3) Lungimea generatoarei conului de divizare
Le = dp/2sin φp = dR/2sin φR= 40.3 mm
4) Lungimea dintelui in lungul generatoarei (latimea danturii)
Kb 0.2 0.3) aleg Kb =0.2233
b = Kb * Le = 9 mm
5) Lungimea generatoarei medii pe conul de divizare
L = Le - 0.5b = 35.8 mm
6) Modulul normal in punctul mediu al dintelui
mn=m*λ'ecosβ = 1.091 mm
λ'e = L/Le = 0.8883
7) Inaltimea capului dintelui
hap= ( fn + εn )* mn = 1.091 mm har = hap
unde: εn = 0
fn= 1
8) Inaltimea piciorului dintelui
hbp= ( 2 fn + c'n )* mn - hap = 1.364 mm
c'n
hbR= ( 2 fn + c'n )* mn - haR = 1.364 mm
9) Diametrul exterior
dep= dp + 2 hap * sinφp = 59.182 mm
deR= dR + 2 haR * sinφR = 59.182 mm
10) Distanta de la planul cercului de divizare la varful conului de divizare.
Vp
= VR = dR /2 = dp/2 = 28.5 mm![]()
11) Distanta de la planul cercului de divizare la suprafata de reazem
Se aleg constructiv:
A'p = 12 mm
A'R = 60 mm
12) Distanta de la suprafata de reazem la varful dintelui
B'p = A'p + hap * sin p = 12.771 mm
B'R = A'R + haR * sin R=60.771 mm
13) Latimea corpului rotii in sens axial
Bp = B'p + B*cosφp = 19.1349 mm
BR = B'R + B*cos R = 67.1349 mm
14) Distanta de la varful conului de divizare la suprafata de reazem
Ap = A'p + 0.5 * dp * ctgφp = 40.5 mm
AR = A'R + 0.5 * dR * ctgφR= 88.5 mm
15) Diametrul capului port-cutit :
Dcpc=3.5''
![]()
![]()
![]()
16) Numarul de dinti ai rotii plane :
![]() dinti
dinti
17) Dimensiunea dinte si gol in punctul mediu in sectiunea normala pe roata plana
Snp - grosimea dinte-pinion (pe roata plana)
Sgnp - latimea gol-pinion (pe roata plana)
metoda taiere pinion - fixed setting -
![]()
![]()
![]() Snp = 1.7137 mm
Snp = 1.7137 mm ![]()
εn = 0 τn = 0 αn = 20
Sgnr - latime gol-roata (pe roata plana)
Snr - grosimea dinte-roata
Metoda de taiere roata -spread blade -
![]()
![]()
18) Dimensiunea dinte si gol in punctul mediu in sectiunea frontala pe roata plana
Sp - grosimea dinte-pinion (pe roata plana)
Sgr - latimea gol-roata (pe roata plana)
![]() Sp = 2.092
Sp = 2.092
Sr - grosimea dinte-roata (pe roata plana)
Sgr - latimea gol-pinion (pe roata plana)
![]() SR = 2.092
SR = 2.092
19) Dimensiunea dinte si gol in sectiune normala la diametrul exterior al rotii plane
Snep - grosimea dinte pinion in plan normal la exterior
Sgner - latimea gol roata in plan normal la exterior
metoda de taiere pinion - fixed setting -
![]() Snep = 1.7137
Snep = 1.7137
Sher - grosimea dinte roata in plan normal la exterior
Sghep - latimea gol pinion in plan normal la exterior
![]() λ1 = 1.1256
λ1 = 1.1256
![]() β = 37
β = 37
![]() Sner = 2.0302 mm
Sner = 2.0302 mm
20) Dimensiunea dinte si gol la exterior in plan frontal la roata plana
Sep- grosimea dinte pinion in plan frontal la exterior
Sger- latimea gol roata in plan frontal la exterior
![]() Sep = 2.1557 mm
Sep = 2.1557 mm
Ser - grosimea dinte roata in plan frontal la exterior
Sgep - latimea gol pinion in plan frontal la exterior
![]() Ser = 2.5538 mm
Ser = 2.5538 mm
21) Dimensionarea dinte si gol in sectiune normala la diametrul interior al rotii plane
Snip - grosimea dinte pinion in plan normal la interior
Sgnir - latime gol roata in plan normal la interior
metoda de taiere pinion - fixed setting -
![]() Snip = 1.7137
Snip = 1.7137
Shir - grosimea dintre roata in plan normal la interior
Sghip - latimea gol pinion in plan normal la interior
![]()
![]()
![]() λi =
0.8303
λi =
0.8303
![]() βi = 33.2
βi = 33.2
![]() Snir = 1.3473 mm
Snir = 1.3473 mm
22) Dimensiunea dinte si gol la interior in plan frontal la roata plana:
Sip-latime gol roata in plan frontal la interior;
Sgir-latime gol roata in plan frontal la interior;
![]() Sip = 2.048 mm
Sip = 2.048 mm ![]()
Sir-grosimea dinte roata in plan frontal la interior;
Sgip-latime gol pinion in plan frontal la interior;
![]() Sir = 1.6101 mm
Sir = 1.6101 mm ![]()
23) Grosimea dintelui pe coarda de grosime constanta in punctul mediu al dintelui (sectiune normala)
![]() S'nxp = 1.51326 mm
S'nxp = 1.51326 mm
![]() S'nxr = 1.51326 mm
S'nxr = 1.51326 mm
24) Inaltimea la coarda constanta:
![]() h'nxp = 0.8156 mm
h'nxp = 0.8156 mm
![]() h'nxr = 0.8156 mm
h'nxr = 0.8156 mm
25) Verificarea la ascutire pentru sistemul de prelucrare 'spread blade' roata si 'fixed setting pinion', verificarea se face la roata
![]() di = 62.6 mm
di = 62.6 mm
![]() dei = 64.782 mm
dei = 64.782 mm
![]() 0s =
23.5
0s =
23.5
![]()
![]() αis = 31.39
αis = 31.39
dei*
 ≥
( 0.3 ; 0.5 ) [mm]
≥
( 0.3 ; 0.5 ) [mm]
Sir = 1.6101 ![]() →
0.441842 ≥ ; 0.5455 )
→
0.441842 ≥ ; 0.5455 )
Tesirea la varf a danturii nu este necesara.
Calculul de predimensionare al arborelui 7
Arborele 7 se predimensioneaza din solicitarea de torsiune :
darb7 =  = 7.864 [mm]
= 7.864 [mm]
Aleg constructiv darb7 = 12 mm
Materialul din care este confectionat arborele 7 este OLC 45
τa = 30 [N/mm2]
Mt7 = 
*![]()
Mt7 = 2865.77 [N*mm]
εarb7 = εarb6 = 0.0453
Calculul momentului de inertie al rotii z9
Se cunosc :
- L = 57.13 [mm]
- D = 57 [mm]
- d = 32 [mm]
mz9 = 0.56 [Kg]
Jy = 0.000308622 [Kg*m2]
Calculul mnomentului de inertie al arborelui 6
Se cunosc :
- L = 26 [mm]
- = 12 [mm]
marb6 = 0.023 [Kg]
Jy = 0.0000015081 [Kg*m2]
Alegerea si calculul geometric al rotilor dintate cu dinti drepti din angrenajul z11/ z12
- modulul rotilor: m = 1.5 [mm]
- numarul de dinti z11 = z12 = 42
- diametrul de divizare : Dd11 = Dd12 = m*z11,12 = 63 [mm]
- inaltimea dintelui h = a + b = 3.375 [mm]
a = m = 1.5 [mm]
b = 1.25*m = 1.875 [mm]
- diametrul exterior : De = Dd + 2*a = m *(z + 2) = 66 [mm]
- diametrul interior: Di = Dd - 2*b = m*(z-2.5) = 59.25 [mm]
- diametrul de baza : Db = Dd* cosα = 59.2 [mm]
- distanta dintre axele rotilor : a11-12 = ![]() =
63 [mm]
=
63 [mm]
Alegerea cuplajelor cardamice
MPITCH max = 2.8708 [N*m]
In functie de MPITCHmax se aleg, atat pentru axa de rotatie PITCH cat si pentru axa de rotatie ROLL, motoarele de actionare de tip servomotoare de c.c / c.a fara perii colectoare de la firma Kallmorgen .
Motorul ales este din seria :
M tip M-105-B ce are urmatoarele caracteristici constructiv - functionale :
Mmax = 4.5 [N*m]
hmax = 7500 [rot/min]
Caracteristici geometrice : A = 262.1 [mm] ; B = 237.9 [mm]
C = 30 [mm D = 20 [mm]
Toti arborii predimensionati au d = 12 [mm] numai in zona de lagaruire, ei avand dupa caz si salturi de diametrii.
Determinarea masei si centrului de greutate ale sistemului de orientare
Originea sistemului de referinta, fata de care se determina centrele de greutate ale componentelor organologice, este in centrul flansei ce reailzeaza asamblarea intre sistemul de orientare si segmerntul ce realizeaza miscarea de translatie in plan vrtical.
Detrminarea centrelor de greutate ale componentelor organologice ale sistemului de orientare
a) pentru roata z1 :
mz1 = 0.115 [Kg]
xgz1 = 290 [mm] ygz1= 0 [mm] zgz1 = 0 [mm]
b) penrtu roata z2 :
mz2 = 0.339 [ Kg]
xgz2 = 270 [mm] ygz2 = - 33 [ mm] zgz2 = 0 [mm]
c) pentru roata z3 :
mz3 = 0.2405 [Kg]
xgz3 = 270 [mm] ygz3 = -66 [mm] zgz3 = 0 [mm]
d ) pentru roata z4 :
mz4 = 0.2405 [Kg]
xgz4 = 165 [mm] ygz4 = -66 [mm] zgz4 = 0 [mm]
e ) pentru roata z5 :
mz5 = 0.339 [Kg]
xgz5 = 165 [mm] ygz5 = -33 [mm] zgz5 = 0 [mm]
f ) pentru roata z6 :
mz6 = 0.115 [Kg]
xgz6 = 145 [mm] ygz6 = 0 [mm] zgz6 = 0 [mm]
g ) pentru roata z7
mz7 = 0.2405 [Kg]
xgz7 = 270 [mm] ygz7 = 115 [mm] zgz7 = 0 [mm]
h ) pentru roata z8 :
mz8 = 0.2405 [Kg]
xgz8= 165 [mm] ygz8= 115 [mm] zgz8 = 0 [mm]
i ) pentru roata z9 :
mz9 = 0.557 [Kg]
xgz9= 165 [mm] ygz9 = 55 [mm] zgz9 = 0 [mm]

j ) pentru roata z10:
Se cunosc :- L = 19.13 [mm]
D = 57 [mm]
d = 44 [mm]
mz10 = 0.307 [Kg]
xgz10 = 135 [mm] ygz10 = 0 [mm] zgz10 = 0 [mm]
 k ) pentru roata z11 :
k ) pentru roata z11 :
Se cunosc :- L = 20 [mm]
D = 66 [mm]
d = 52 [mm]
mz11 = 0.4325 [Kg]
xgz11 = 64 [mm] ygz11= 0 [mm] zgz11 = 0 [mm]
l ) pentru roata z12 :
mz12 = 0.3648 [Kg]
xgz12= 64 [mm] ygz12= 0 [mm] zgz12 = 0 [mm]
m ) pentru arborele 1 :
marbn1 = 0.0828 [Kg]
xarb1 = 300 [mm] yarb1= 0 [mm] zarb1 = 0 [mm]
n ) pentru arborele 2 :
marbn2 = 0.0635 [Kg]
xarb2 = 270 [mm] yarb2= -73 [mm] zarb2 = 0 [mm]
o ) pentru arborele 3:
marbn3 = 0.0635 [Kg]
xarb3 = 170 [mm] yarb3= -73 [mm] zarb3 = 0 [mm]
p ) pentru arborele 4:
marbn4 = 0.1208 [Kg]
xarb4= 68 [mm] yarb4= 0 [mm] zarb4 = 0 [mm]
r ) pentru arborele 5:
marbn5 = 0.1376 [Kg]
xarb5= 270 [mm] yarb5= 63 [mm] zarb5 = 0 [mm]
s ) pentru arborele 6:
marbn6 = 0.0229 [Kg]
xarb6= 165 [mm] yarb6= 140 [mm] zarb6 = 0 [mm]
s ) pentru arborele 7:
marb7 = 0.415 [Kg]
xarb7= 77 [mm] yarb7= 0[mm] zarb7 = 0 [mm]
t ) pentru flansa sistemului de orientare ( cea care face legatura cu sistemul de prehensiune) :
mflSO = 3.9517 [Kg]
xgflSO= 375 [mm] ygflSO= 0 [mm] zgflSO = 0 [mm]
t ) pentru reductorul armonic HDP 20 :
mRA1 = 0.32 [Kg]
xRA1= 360 [mm] yRA1= 0 [mm] zRA1 = 0 [mm]
u ) pentru reductorul armonic HDR 32 :
mRA2 = 1.7 [Kg]
xRA2 = 270 [mm] yRA2= 63 [mm] zRA2 = 0 [mm]
v ) pentru arborele cu canal de pana :
marbn pana = 0.1014 [Kg]
xarb pana = 57 [mm] yarb pana = 0 [mm] zarb pana = 63 [mm]
w ) pentru carcasa arborelui 1:
mcarcasa arb1= 0.6828 [Kg]
xgcarc. arb1 = 330 [mm] ygcarc. arb1 = 0 [mm] zgcarc. arb1 = 0 [mm]
x ) pentru capacele arborilor 2, 3, 5 si 6 ( confectionate din aluminiu →ρ = 2700 [KG/m2] )
mcapac = 0.0448 [Kg]
-capac 1
xgcapac = 270 [mm] ygcapa 1= 160 [mm] zgcapac 1 = 0 [mm]
-capac 2
xgcapac = 270 [mm] ygcapa 2= -115 [mm] zgcapac 2 = 0 [mm]
-capac 3
xgcapac = 170 [mm] ygcapa 3 = 160 [mm] zgcapac 3 = 0 [mm]
-capac 4
xgcapac = 170 [mm] ygcapa 4 = -115 [mm] zgcapac 4 = 0 [mm]
z ) flansa de legatura cu segmentul 2 al SO :
mfl leg = 8.097 [Kg]
xgfl leg = 60 [mm] ygfl leg = 0 [mm] zgfl leg = 20 [mm]
q ) carcasa sistemului de orientare :
mcarc = 18.15 [Kg]
xgcarc = 245 [mm] ygcarc = 2 [mm] zgcarc = 0 [mm]
Determinarea centrului e greutate al sistemului de orientare
xg =  = 212.213 [mm]
= 212.213 [mm]
yg =  = 14.51 [mm]
= 14.51 [mm]
zg =  = 4.38 [mm]
= 4.38 [mm]
Masa sistemului de orientare : ![]() = 35.76 Kg
= 35.76 Kg
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1733
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved