| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Existenta comutatoarelor de faza eficiente si a procesoarelor rapide au facilitat dezvoltarea si folosirea pe scara larga a comenzilor motoarelor asincrone.
La o comanda tipica de motor asincron, convertorul serveste la convertirea energiei furnizate intr-o forma convenabila pentru comanda motorului.
Caracteristica de iesire a convertorului poate fi controlata asa incat sa apara ca o sursa de tensiune sau curent de marime si frecventa reglabila pentru motor.
In figura 1.11. se arata schema bloc a unei comenzi de motor asincron. Puterea furnizata catre motor se face in maniera dorita asa cum o dirijeaza regulatorul (controlerul electronic).
De obicei, conditionarea implica generarea formelor de unda corespunzatoare de tensiune si de curent cu temporizarea adecvata.
Functia de baza a regulatorului e de a transforma valoarea de comanda si semnalele de reactie (feed back) in semnalele de control pentru comanda convertorului.Mai poate avea si alte functii, de exemplu monitorizare si protectie.
Dinamica electrotehnicii in domeniul comenzilor motoarelor asincrone sub diferite strategii de control poate fi studiata prin simulare folosind o sursa de curent sau tensiune sinusoidala de amplitudine si frecventa variabila pentru a reprezenta comportamentul fundamental al formei de unda reala a invertorului.
Cum energia este data in principal de componenta fundamentala se va descrie interactiunea de control de baza.
O astfel de simulare poate asigura o intelegere a principiilor de control implicate fara a intra in detalii ale partilor constructive electronic

al convertorului care va fi dificil de simulat si ia mult timp din cauza discontinuitatilor numeroase cauzate de comutarile invertorului.
Nu poate fi folosita pentru a rezolva probleme asociate cu armonicile formelor de unda reale ale invertorului.
Invertoarele pot fi clasificate in doua categorii mari dupa caracteristica sursei si anume, invertoare alimentare cu surse de tensiune sau invertoare alimentare cu surse de curent.
Invertoarele alimentate in tensiune au surse de alimentare care se comporta ca surse de c.c. adesea redresoare cu condensator in paralel in legaturile de curent continuu.
Alimentarea unui invertor alimentat in curent e de obicei un redresor comandat cu o bobina serie mare in legatura de curent continuu.
Majoritatea motoarelor asincrone mici din ziua de azi folosesc un invertor cu modulatie de durata a impulsurilor alimentate alimentate in tensiune ce permit atat amplitudinii tensiunii cat si frecventei de iesire in curent alternativ sa fie schimbate electronic.
Functia modulatorului cu modularea in durata a impulsurilor este de a transforma formele de unda de modulare de amplitudine si frecventa variabila intr-un tren de impulsuri comutabile pentru invertor la un modulator clasic sinusoidal cumodulare de durata a impulsurilor incrucisabile dintre forma de tensiune sinusoidala si purtatoarea triunghiulara determina punctele de comutatie ale impulsurilor .
In fig. 1. 12. Arata formele de unda ale tensiunii de iesire a unui invertor sinusoidal trifazat cu mod de durata a impulsurilor ( M01 ).
La un invertor sinusoidal cu M 01 indexul de modulare e definit ca raportul dintre amplitudinea undei modulatoare la amplitudinea undei purtatore. Marimea componentei fundamentale a iesirii e proportionala cu indexul de modulare, cand acesta este mai mic ca unitatea.
La un index de modulare 1 marimea componentei fundamentalei e cam 79% din cea a unei unde patrete de aceiasi amplitudine .
Pe masura ce indexul de modulare se apropie de 1, latimea pulsului devine prea mica asa incat nu va fi timp suficient pentru comutatoarele cu semiconductori sa se stinga (sa inchida ) si sa revina la capacitatea de blocaj.
La intervalele unde e posibila folosirea pe un brat de invertor a unui scurtcircuit de curent continuu prin doua dispozitive de comutare complementare durata impulsului care e insuficienta pentru o revenire completa a dispozitului pe timpul inchiderii si se pote preveni prin inchidere sau comutare ulterioara dupa un timp minim specificat.
Peste indexul unitar relatia dintre marimea fundamentala de iesire si indexul de modulare devine neliniara. In apropierea limitei superioare a tensiunii de iesire in curent alternativ, multe invertoare alimentate in tensiune vor trece de la modulare in impulsul pe o forma de modulare bloc si in final ca o forma de unda de iesire cvasi-patratica.
Modularea bloc tinde sa produca un continut relativ mare de armonici joase care de obicei nu sunt o problema la viteze mari. Este o metoda de modulare favorabila pentru invertor alimentat in curent , mai ales la puteri mai mari. Exista in afara schemei MDI sinusoidale mentionate aici si alte scheme MDI si fiecare are ceva nou de oferit.
De exemplu tehnica alimentarii armonicelor descrisa permite eliminarea si a armonicelor nedorite sau se mai folosesc MDI cu injectii sub armonica ce folosesc unde modulatoare sinusoidale. Scheme MDI ce folosesc vector spatial de tensiune pentru a reduce anumiti armonici de curent si MDI optimale precalculate astfel incat sa indeplineasca criterii specifice.
Fig. 1.13 indica stategiile de operare folosite adesea pentru regim de lucru motor pentru a obtine o gama larga de viteza. Pentru acest regim indentificam urmatoarele trei moduri.
Modul1 - Mentine
Modul 2 -Mentine tensiunea
statorului la valoarea nominala si regleaza curentul de stator pentru a obtine
putere
Modul 3 - Mentine tensiunea statorului la valoarea nominala si regleaza viteza de alunecare chiar sub valoarea ei pentru un cuplu de decrosaj.
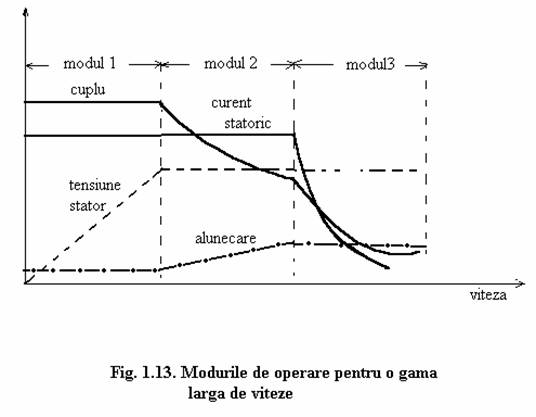
In modul 1 raportul dintre marimea tensiunii de iesire a invertorului si frecventa invertorului e reglat pentru a mentine fluxul in intrefier aproximativ constant.
Cuplul maxim disponibil in regim de cuplu constant e fixat de obicei limitand curentul invertorului ca sa fie sub acel cuplu de decrosaj corespunzator.
Trecerea de la modul 1 la modul 2 au loc cand tensiunea maxima disponibila a invertorului e atinsa.
In modul 2, comanda opereaza cu tensiunea maxima disponibila a invertorului; adesea forma de unda de iesire va fi cvasipatratica.
Pe masura ce frecventa continua sa creasca in acest mod, masina va lucra cu flux in intrefier redus.
Marginile acestui mod sunt obtinute prin cresterea alunecarii pentru a mentine curentul de stator in limitele sale. Trecerea de la modul 2 la modul 3 are loc cand alunecarea se apropie in final de valoarea corespunzatoare conditiei de cuplu de decrosaj.
Dupa aceea alunecarea va fi obtinuta chiar sub valoarea de cuplu de decrosaj si reglarea curentului de stator inceteaza.
Limita superioara a vitezei poate fi determinata prin consideratii, cum ar fi desincronizarea inacceptabila, pierderi excesive in fier si bobinaj, joc mecanic si oscilatii mari ale sarcinii.
Fig.1.13 arata strategiile de lucru numai pentru regimul motor; celea pentru franare sunt asemanatoare.
Limita superioara a modului 1 este la o viteza mai mare decat in cazul regimului de motor pentru ca in franare, caderile de tensiune din masina sunt inversate.
Pentru multe aplicatii cu viteza variabila la care e permisa o mica variatie a vitezei motorului cu sarcina, poate fi satisfacator un sistem simplu cu bucla deschisa ce foloseste un control al U/f cu compensare de joasa frecventa, ca cel din figura 1.14.
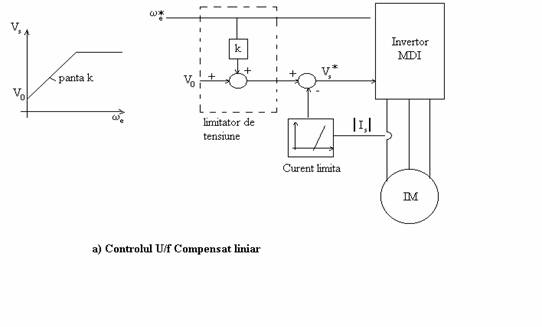
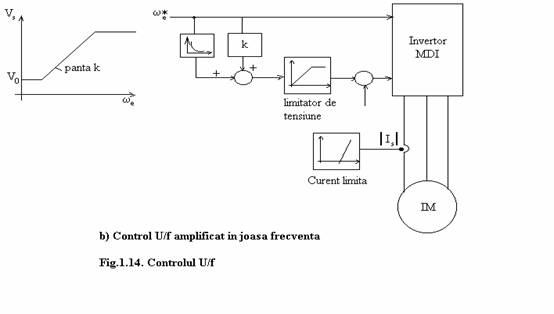
Figura 1.14 arata doar doua moduri simple de generare a unei
caracteristici U/f compensate. Alte moduri cu caracteristici dependente de sarcina sunt in referatul urmator si in teza.
Cum s-a aratat, o comanda a vitezei de alunecare se adauga vitezei masurate a rotorului pentru a produce frecventa invertorului dorita.
Valoarea de comanda a vitezei de alunecare poate fi negativa, caz in care masina va fi generator in loc de motor; totusi, valoarea ei trebuie limitata la o margine de siguranta sub viteza de alunecare ce corespunde punctului de cuplu de decrosaj.
Intrucat viteza de alunecare e in mod normal mica comparata cu viteza rotorului, o astfel de schema necesita masuratori precise a vitezei rotorului.
Operarea cu viteza de alunecare negativa va determina motorul sa introduca energie inapoi in legatura de curent continuu. Puterea regenerata trebuie sa fie disipata pe o rezistenta (rezistor) de franare sau regenerata pe pe partea de curent alternativ pentru a evita cresterea excesiva a tensiunii de curent continuu datorata supraincarcarii condensatorului de filtraj din circuitul intermediar.
Strategia alunecarii controlate e folosita mult pentru ca atat factorul de putere al intrarilor masinilor asincrone cat si raportul cuplu/ curent stator pot fi mentinute la valori ridicate, rezultand o mai buna valorificare a curentului invertor disponibil.
Cand fluxul in intrefier si viteza de alunecare sunt ambele mentinute constante, cuplu dezvoltat va fi acelasi, dar randamentul nu e atat de bun ca cel obsinut cand alunecarea mentinuta constant.
Cand alunecarea e
In figura 1.15 am aratat o schema de control a vitezei cu bucla inchisa ce foloseste regulator U/f si totodata reglajul alunecarii.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2209
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved