| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Conducerea in curbe a vehiculelor cu osii orientabile
Dispozitivele clasice de rulare, cu osii fixe in raport cu sasiul, au avut la baza conceptia ca, prin ghidarea osiilor cu mentinerea paralela a acestora, se asigura stabilitatea transversala a vehiculului si ca, totodata, ceea ce s-a dovedit a fi fals, se reduc solicitarile exercitate de buzele rotilor asupra sinelor in curbe. Dupa cum s-a aratat, la vehiculele cu osii fixe, conducerea in curbe se realizeaza prin forte exercitate asupra buzelor rotilor, producandu-se alunecari longitudinale si transversale, care au ca efect producerea de uzari importante a suprafetelor de rulare si a buzelor rotilor, precum si a sinelor.
In scopul imbunatatirii calitatilor de rulare ale vehiculelor, cercetarile din ultimii ani s-au oriental spre sistemele de conducere elastica a osiilor, atentia indreptandu-se asupra posibilitatilor de autoghidare a osiilor montate. Orientarea noua in concepjia boghiurilor consta in crearea aptitudinii de negociere a razelor de curbura prin asezarea in pozitie radiala a osiilor, fara a fi insa afectata stabilitatea transversala a vehiculului in aliniament. Se urmareste ca vehiculul sa poata circula intr-o curba de raza mica, fara alunecari si fara contact intre buza si sina, eliminandu-se astfel riscul deraierii si, totodata, reducandu-se considerabil uzurile si consumul de energie pentru tractiune.
Alunecarile, atat transversale, cat si longitudinale, pot fi inlaturate daca se da posibilitatea osiei montate de a se aseza radial si, totodata, de a se deplasa transversal astfel incat aceasta sa aiba o miscare de rulare pura. Astfel, intr-o curba de raza R, rularea pura a unei osii cu conicitatea efectiva γ se realizeaza la un decalaj al osiei montate din pozitia medians in cale
![]()
in care, pentru pozijia medians a osiei, r reprezinta raza cercului efectiv de rulare;
γ0 -unghiul de flanc al suprafetei de ruale; ρr, ρs - razele de curbura ale profilului rotii si, respectiv, al sinei.
Profilul rotii prezinta o importanta deosebita, atat in ceea ce priveste posibilitatea de rulare pura in curbe de raze mici, cat si a producerii unei fortte de centraj (numita si forta gravitationala), cu efect de stabilizare a miscarilor transversale ale osiei si de reducere a eforturilor exercitate asupra osii. Aceste cerinte nu pot fi satisfacute decat daca se folosesc roji cu profiluri de uzura care sunt superioare celor conice, atat din punctul de vedere al marimii conicitatii efective, cat si prin faptul ca numai acestea pot produce forte de centraj.Forta de centraj C putand fi considerata proportionala cu decalajul y la valori mici ale acestuia, se comporta ca o forja elastica produsa de un arc cu rigiditatea (constanta elastica de centraj.
![]()
Forta centrifuga care se exercita asupra osiei montate actioneaza in sens contrar forjei de centraj, astfel ca exista o viteza la care osia cu profil de uzura la roti poate realiza rularea pura fara atingerea buzei de flancul interior al sinei.
Pentru o osie libera, intr-o curba de raza R, supusa actiunii fortei exterioare Fn (fig.),
ecuatiile de echilibru sunt
![]()
![]()
de unde, eliminand forta P, se obtine
![]()
si, reprezentand curbele M, D si Z, ajungem la concluzia ca osia libera este instabila, deoarece pozitia polului Ω este nedefinita, curba Z tinzand asimptotic catre axa absciselor.
De altfel osia libera reprezinta o situatie ipotetica, intrucat osia montata este intotdeauna legata intr-un sistem care ii asigura ghidarea in cale
Fig. osia libera in curba Fig. osia condusa prin bissel
La locomotivele cu abur, osiile alergatoare erau prinse intr-un bissel (un fel de oiste) legat elastic de sasiu, care permitea asezarea radiala in curba a osiilor. Conditiile de echilibru pentru un astfel de sistem de ghidare a osiei sunt

obtinandu-se 
sau
de unde rezulta ca pozitia polului H se obtine din conditia Z=M1 Forta F fiind necunoscuta, se aplica metoda de relaxare prezentata. Astfel, considerandu-se o serie de pozitii ipotetice ale osiei, se determina curba R=M-M1 a carei intersectie
cu D va corespunde pozitiei adevarate a polului Ω.
In cazul in care osia vehiculului are rotile cu profiluri de uzura, fortele tangentiale Tx actioneaza in sensul micsorarii unghiului de atac a (fig. 10.16), orientand astfel osia spre pozitia radiala corespunzatoare, la care forta tangentiala T devine nula. Aceasta proprietate la care se adauga si efectul de centraj sunt caracteristici fundamen-tale ale osiilor numite orientabile
Fig.. osie cu profil de uzura in curba
Pentru a asigura orientarea radiala a osiilor la circulatia in curbe, H Scheffel a conceput un boghiu la care osiile sunt conjugate prin legaturi tip bissel, elastice lateral si articulate la varfuri (fig., a In felul acesta se realizeaza si o reducere a miscarilor de serpuire a osiilor prin faptul ca o rotatie de serpuire a unei osii provoaca aparitia unui moment care, exerci-tandu-se asupra celeilalte osii, o va deplasa in sens
opus. S-a realizat in felul acesta o stabilizare a osiilor, numita 'in raport cu solul', sistemul elastic astfel conceput opunandu-se deplasarilor transversale si unghiulare relative intre cele doua osii. Aceleasi efecte se obtin si prin conjugarea osiilor cu bare asezate in cruce (fig., b).
In continuare se va determina rigiditatea longitudinala cx a sistemului de ghidare cu bare asezate in cruce, cu cuplaj transversal relativ rigid intre osii, astfel incat sa se asigure boghiului circulatia in curbe fara contact al buzelor rotilor cu sinele .
Fig..Sisteme de conjugare a osiilor, concepute de Scheffel:
a- prin bare articulate; b-prin bare asezate in cruce
O astfel de conditie nu poate fi realizata decat in cazul in care rotile au profiluri de uzura.
Pentru osiile asezate in pozitie radiala (fig...), rularea pura sc produce atunci cand, fata de pozitia mediana, acestea se deplaseaza spre firul exterior cu yc=yco=er/(yR). Aceasta deplasare face sa apara o fora de centraj transversala
![]()
care este echilibrata de forta de frecare transversala T ce apare datorita pseudoalunecarii transversale vy = a produse prin rotirea cu unghiul a a osiei fata de directia radiala (fig...). Astfel, tinand seama de cele mentionate, vom avea
2Ty= 2ryQ= 2XyvyQ= 2fya
in care fy = xyQ se poate interpreta ca un coeficient de pseudoalunecare exprimat in unitati de forta. Din conditia C = 2Ty , adica
cyer/(yR)= 2fya
rezulta
![]()
aceasta rotire avand ca urmare o variatie a decalajului transversal Δy= (a/2)a , respectiv variata fortei de centraj cu
![]()
forta de centraj la osia din fata devenind
ceea ce face sa se modifice cu Δα inclinarea osiilor, acest unghi rezultand din conditia
Datorita decalajului Δy osiile nu vor mai rula conic, aparand pe fiecare roata o pseudoalunecare longitudinala
vx (y/r)Δ y= (ylr) {a/2)α ,
respectiv o forta de pseudoalunecare longitudinala
Tx = τxQ = χx υx Q = fx υx= fx (γ/r)(a/2)α
unde fx = χx Q
Fig.fortele care actioneaza asupra osiilor cand acestea se afla in conditia de rulare pura si cand acestea se abat de la pozitia radiala
MomentuI fortelor Tx va trebui sa fie echilibrat de momentul fortelor elastice din arcurile longitudinale, adica

Fig.varianta de conjugare cu bare articulate Fig.. Sisteme de orientare a osiilorde catre cutia vehiculuiui
obtinandu-se in final
si, tinand seama ca, in general, unghiul Δα este foarte redus, chiar in curbe cu raze mici, se poate considera
Boghiurile cu osii orientabile sunt tot mai des utilizate in ultimul timp la vehiculele destinate sa circule in curbe cu raze mici. S-au conceput si alte variante constructive, unele din acestea tinand seama si de spatiul disponibil pe boghiu pentru amplasarea elementelor sistemului de conjugare. In fig. .. se prezinta o solutie de conjugare a osiilor cu bare articulate plasate in spatiul lateral al boghiului. Alte sisteme se bazeaza pe orientarea fortata a osiilor de catre cutia vehiculului produsa prin rotatia boghiului fata de cutie la inscrierea in curba (fig. ..).
Pe langa acestea exista si sistemele 'cu orientare naturala a osiilor', la care orientabilitatea radiala a osiilor este favorizata prin conducerea elastica longitudinala a acestora (fig. .)
Fig. Boghiu cu conducere elastica a osiilor
Pentru un boghiu cu conducere elastica a osiilor, ca cel reprezentat in fig. .., se va analiza inscrierea in curba presupunand ca s-a stabilit un regim de circulatie stationar, cvasistatic. O lucrare de referinja care trateaza aceasta problema a fost elaborata de D. E. Newland (Steering a flexible railway truck on curved track.
Fig.. Boghiul cu conducere elastica a osiilor la circulatia in curba
Se presupune ca sub acjiunea fortei exterioare Fn si a fortelor de contact dintre roti si sine boghiul se asaza in curba in pozitia din fig. .., osiile facand cu normalele la curba unghiurile (de atac) α1 si, respectiv, α2 De asemenea se presupune ca nu apar alunecari mari ale rotilor (cu profil de uzura), ci pseudoalunecari proportionale cu fortele de contact si ca fortele de centraj pot asigura rularea osiilor fara contact pe buze.
Fata de axa caii, centrele osiilor sunt decalate sprc exterior cu yc1 si, respectiv, yc2 iar sasiul boghiului, redus la axa sa longitudinals, este decalat in dreptul osiilor cu yt si, respectiv, y2
In timpul miscarii, fortele de frecare, fortele de centraj si cele din suspensie, de pe fiecare osie, trebuie sa fie in echilibru. De asemenea, forjele din suspensie care actioneaza asupra sasiului boghiului trebuie sa fie in echilibru cu forja aplicata in crapodina (fig. .)
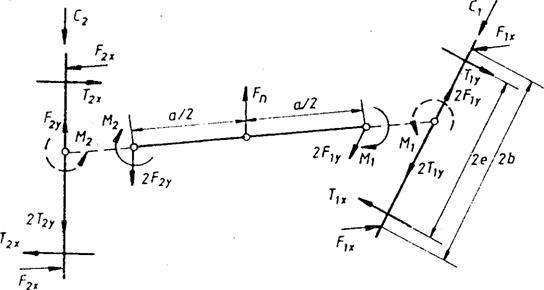
Fig. . Fortele si momentele care actioneaza asupra osiilor si sasiului boghiului
Fata de sasiu osiile sunt rotite cu

si deci forjele longitudinale din arcurile suspensiei vor fi
![]()
care pot fi reduse la momentele

Fortele transversale din arcurile suspensiei sunt:
![]()
Daca se noteaza si in acest caz cu ![]() coeficientii de pseudoalunecare (in unitafi de
forta), q fiind sarcina pe roata, atunci fortele de pseudoalunecare vor fi
coeficientii de pseudoalunecare (in unitafi de
forta), q fiind sarcina pe roata, atunci fortele de pseudoalunecare vor fi
Fortele de centraj ale celor doua osii sunt
![]()
unde, de data aceasta, s-a notat cu cg
Cu fortele astfel stabilite, se pot scrie ecuatiile de echilibru pentru osii si pentru sasiul boghiului, in care se tine seama de valorile mici ale unghiurilor care intervin
care, dupa inlocuiri, devine
ecuatii care permit stabilirea pozitiei de inscriere in curba a unui vehicul pe doua osii in cazul general cand osiile sunt legate de sasiu prin elemente elastice longitudinale si laterale. Pe baza ecuatiilor de mai sus se vor analiza in continuare doua cazuri particulare.
Cazul 1. Boghiu cu flexibilitate longitudinala infinita, cx = 0. Aces: caz este ipotetic, deoarece un boghiu cu osii libere in realitate nu poate exista. Daca pentru astfel de osii se presupune ca si centrajul este nul, adica cg = 0, rezulta
care arata ca osiile realizeaza o rulare conica, deci fara alunecari longitudinale, abaterea osiei de la axa caii depinzand numai de geometria osiei. Daca Fn= osiile se vor orienta radial, realizand rularea pura fara nici un fel de alunecari. Forta laterala Fn modifica numai unghiul de atac al osiei, facand ca aceasta sa ruleze cu alunecari transversale.
Fortei laterale pe fiecare roata i se opune forta de pseudoalunecare Ty care este maxima atunci cand coeficientul de frecare transversal este maxim, adica pentru γy= μ. Rezulta deci, din conditia Ty = fya =μQ unghiul de rotire limita al osiei
![]()
Daca se ia in considerare si
care arata ca efecrul de centraj al osiei duce la micsorarea unghiului de atac.
Cazul 2. Boghiu cu osii fixe: cx = oo , cy = oo fn acest caz yl =ycI, y2 =yc2 Presupunand de asemenea ca c = 0, se obtin unghiurile de atac
precum si decalajele osiilor
de unde, pentru Fn = 0, rezulta

care corespunde pozitiei boghiului din fig. .. Relatiile arata ca abaterea de la axa caii la un boghiu rigid este mai mare decat in cazul osiilor libere. Aceasta abatere este cu atat mai mare, cu cat ampatamentul vehiculului va fi mai mare. Osiile in acest caz sunt impiedicate de a se orienta radial si a gasi pe sine o pozitie in care sa se poata misca cu rulare pura.
Fig. asezarea in curba a unui boghiu rigid
![]()
![]()
Cand pe crapodina se aplica forta laterala Fn relatiie arata ca
decalajul osiei din fata se micsoreaza cu (a/2).Fn/(4fy)
iar a celei din spate creste cu aceeasi valoare. Deci, ca urmare a fortei
laterale, intregul boghiu ia o pozitie rotita fata de cale cu unghiul
![]()
Pentru Fn = 0, pseudoalunecarile longitudinale sunt

iar cele transversale
![]()
si deci forta de pseudoalunecare rezultanta pe roata este
![]()
care, pentru
valoarea maxima a acesteia fiind μQ Prin urmare, vehiculul va parcurge cu alunecari curbele cu raza
rezultand si din acest punct de vedere efectul defavorabil al ampatamentelor mari.
Cazul 3. Osii legate elastic de sasiu. Considerand si in acest caz c =0, din sistemul de ecuatii se obtine

Primul termen din relatia (...) pune in evidenja abaterea de la axa caii iar al doilea reprezinta deplasarea radiaia a osiei datorita fortei laterale Fn .
Pentru elastitati mici ale suspensiei, abaterea de la axa caii este mai mare decat
in cazul osiilor fixe iar daca 2cx b2 >fx a, elasticitatea suspensiei nu imbunatateste
inscrierea in curba a vehiculului. Daca 2cx b2 <fx a, abaterea de la axa caii va scadea iar pentru o suspensie suficient de elastica abaterea se va apropia de valoarea minima (posibila pentru osii libere) yc] = yc0.
Abaterea de la axa caii, cand 2cx b2 <fx a, se reduce si prin marirea valorii termenului
![]()
adica printr-o conicitate efectiva γ mare si prin micsorarea rigiditatii transversale cy . Deplasarea osiei din spate fata de axa caii este

Pentru F = 0, unghiurile pe care le fac osiile cu normalele la cale vor fi
![]()
Forta maxima de pseudoalunecare va aparea la cele doua roti din fata. La acestea, pentru Fn = 0, pseudoalunecarile sunt

iar forta de pseudoalunecare, considerand ca fx=fy=f este

Rezulta deci ca un boghiu cu conducere elastica a osiilor va aluneca pe orice curba a carei raza este
![]()
Cu cat suspensia este mai elastica, cu atat si raza curbei R este mai mica, osiile tinzand spre o pozitie radiala.
Comparand deplasarile produse de forta laterala Fn , se observa ca osia din spate este deplasata mai mult decat osia din fata, aceasta deplasare fiind independenta de raza curbei. Deplasarea sub efectul fortei Fn este, de asemenea, independenta si de abaterea de la axa caii, care se produce chiar daca asupra boghiului nu actioneazi nici o forta laterala si care indica de fapt capacitatea inerenta a boghiului de a se autoghida in cale prin fortele de pseudoalunecare dintre roti si sine.
Fortele dinamice produse prin socul de atac
In curbele caii ferate pot aparea abateri de la dimensiunile nominale, sub forma
de coturi continue sau discontinue, ce produc forte dinamice de interactiune vehicul - cale in directie transversala, care, pe langa ca inrautatesc calitatea mersului, pot periclita si siguranta ghidarii vehiculelor.
Coturile continue ale caii sunt caracterizate prin abaterile de curbura cu variajie continua care, suprapunandu-se peste torsionarile caii, duc la variatia atat a insuficientei de suprainaltare, cat si a acceleratiei transversale a vehiculului. La C.F.R., coturile continue sunt limitate prin tolerantele admise la sagetile masurate.
Coturile discontinue sunt caracterizate prin variatia discontinua a curburii, respectiv prin aparitia in cale a unui punct unghiular. Acestea apar in mod accidental, de regula in dreptul joantelor. Prezenta coturilor discontinue in cale amplifica efectele dinamice ale variatiei insuficientei de suprainaltare, care se suprapun peste cele cvasistatice la circulatia vehiculului in curbe.
Unghiul de soc δ dintre tangentele la cele doua curbe in punctul unghiular (varful cotului discontinuu) se poate calcula din sagetile masurate in dreptul punctului fd si cele alaturate, ----, corespunzatoare unei coarde de masura de lungime C (fig.)
Fig. Detrminarea unghiului de soc
Astfel, cu notatiile din fig. (..), vom avea
De asemenea
![]()
unghiul de soc fiind
![]()
de unde, pentru sageti egale inainte si dupa cot se obtine:
![]()
Daca vehiculul circula cu viteza constanta intr-o curba lipsita de abateri cu insuficienta de suprainaItare I, cutia sa de masa mc va fi supusa unei accelera|ii transversale cvasistatice γT0, respectiv unei forte centrifuge necompensate Fn. Ca urmare, pe fiecare osie va actiona o forja de conducere cvasistatica a sasiului H . Concomitent cu aparitia forjei H are loc si o comprimare elastica a elementelor supra-structurii caii si a vehiculului.
Considerand ca rigiditatea totala a acestora este cy, deformatia lor statica va fi yc=H/cy. Prin urmare, vehiculul va putea fi considerat ca un oscilator armonic simplu., adica un sistem masa - arc, in care yc reprezinta deformatia statica a arcului (fig. ..).
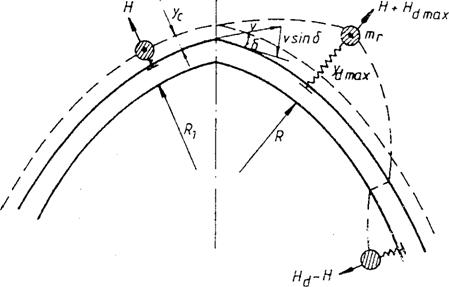
Fig. Reprezentare a evolutiei fenomenului de soc.
In momentul cand vehiculul atinge cu roata exterioara a primei osii varful unui cot discontinuu, sina va fi atacata cu o viteza de atac v.sinδ~vδ avand o directie perpendiculara pe sina atacanta. Se produce astfel o forta dinamica de conducere a sasiului
![]()
numita si forta de soc sau forta de atac, in care yd reprezinta deformatia dinamica a arcului cu rigiditatea cumulata cy .
In procesul de soc nu participa intreaga masa a vehiculului, ci numai o parte din aceasta, respectiv o masa 'redusa', notata cu mr .
Expresia fortei dinamice maxime Hdmx poate fi dedusa aplicand teorcma conservarii energiei. Astfel, componenta vitezei de atac v sinδ r perpendiculara pe sina, va da masei mr in aceasta directie o energie cinetica
![]()
care este preluata elastic de arcul dintre masa si sine, de rigiditate cy In momentul in care comprimarea arcului este maxima ydmax , energia cinetica devine nula, transformandu-se in intregime in energie potentiala
![]()
Daca cotului discontinuu i se asociaza un cot continuu, datorita variatiei ΔI [mm] a insuficientei de suprainaltare, in momentul atacului, vehiculul va avea o acceleratie suplimentara
![]()
sj va efectua un lucru mecanic suplimentar pe distanja yd
tmx . In acesi caz bilanjul
energetic va fi
![]()
de unde rezulta forta dinamica maxima
![]()
fenomenului de soc in timp este data de relatia
![]()
![]() - reprezinta pulsatia miscarii
- reprezinta pulsatia miscarii
![]()
Potrivit caracterului sinusoidal al acestei evolutii, forta dinamica Hd va creste de la valoarea zero pana la valoarea maxima Hdmax , solicitand firul exterior al caii si apoi va scadea, continuand sa actioneze invers pe firul interior al caii.
Forta maxima de soc se produce cand sin(ωt- φ) = 1, deci pe firul exterior al caii, dupa timpul socotit din momentul atingerii varfului de cot

iar pe firul interior dupa ti=3te ,
Frecarile din sistemul vibratoriu produc amortizarea fenomenului pana la dispart|ia sa completa, aceasta daca fortele mari de conducere nu au provocat intre timp deraierea vehiculului.
Rezulta ca valorile maxime ale fortelor care se transmit caii, solicitand-o la deripare, sunt:
- pe firul interior
- pe firul exterior
Deraierea vehiculului, prin depasirea raportului (H/Q0)lim , are loc de regula pe firul interior al caii, care este mai descarcat decat cel exterior.
Relatia poate fi particularizata pentru urmatoarele cazuri:
- pe cale exista numai cotul discontinuu
![]()
pe cale existsa numai cotul continuu (sinδ = 0)
![]()
Relatiile de mai inainte permit o evaluare a fortelor dinamice Hd determinarii corecte a constantei elastice cy si a masei reduse mr
Pentru determinarea constantei elastice cumulate cy sunt necesare rigiditatea transversals a caii cc (pe un fir) si rigiditatea transversala a vehiculului cv:
![]()
si deoarece 1/cc se poate neglija in raport cu 1/cv , intr-un calcul aproximativ se poate considera cy = cv , adica se presupune calea ca fiind rigida. in aceasta ipoteza si totodata admitind ca osia este solidara cu calea, la fenomenul de soc vor participa numai masele suspendate ale vehiculului.
Astfel, la un vehicul pe doua osii, se poate considera ca cv reprezinta rigiditatea transversala a suspensiei osiei si ca la soc participa masa redusa a cutiei mrc, in dreptul osiei. Aceasta masa se poate deduce din conditiile de echilibru dinamic, tinand seama de faptul ca forta dinamica Hd actioneaza dezaxat fata de centrul de masa O la distantele x = xc si z = zc (fig..)
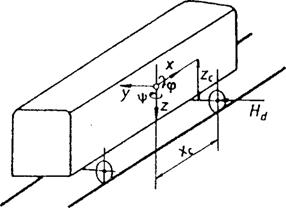
Fig. . Vehicul pe doua osii - model pentru
calculul masei reduse
Astfel, din ecuatiile:
se obtin acceleratiile:
![]()
respectiv acceleratia totala in punctul de aplicatie a lui :
![]()
de unde rezulta ca :
in care reprezinta masa cutiei iar ix si iz reprezinta razele de inertie (giratie) corespunzatoare momentelor de inertie Ix si Iz ale cutiei in jurul axelor Ox si Oz.
Relatiile stabilite pot fi extinse
si pentru vehiculele pe boghiuri, tinand seama ca la soc va participa si masa
redusa a boghiului in dreptul osiei atacante. Masa redusa a cutiei se considera
concentrata in crapodina boghiului.
Studiul prezentat se limiteaza numai la astfel de vehicule intrucat la acestea efectele socului de atac sunt mult mai importante decat la vehiculele care au si suspensie centrala.
Masa redusa mr care este determinata de repartitia maselor proprii ale vehiculului si de starea de incarcare a acestuia, se poate determina prin procedee destul de laborioase de calcul. Experimental, aceasta poate fi usor determinata masurand in mers acceleratiile transversale in doua puncte de pe sasiul cutiei, respectiv, al boghiului; se obtine astfel pozitia polului acceleratiilor (polul de inertie), functie de care rezulta masa redusa care actioneaza pe osia atacanta.
Constanta de rigiditate cy , care este influentata si de elasticitatea proprie a structurii de rezistenta a vehiculului, se poate determina experimental masurand deplasarea osiei sub efectul unor forte transversale aplicate sasiului in dreptul osiei atacante.
Fortele de conducere a sasiului prezinta o importanta practica deosebita, fiindca determina siguranta la deriparea caii, solicitarea organelor de rulare ale vehiculului, precum si siguranta la deraiere .
Pentru a ilustra mersul calculelor se va considera cazul unui vehicul pe boghiuri cu doua osii, fara suspensie centrala, care circula cu viteza V [km/h] intr-o curba de raza R [m] cu suprainaltarea h [mm]. Acestei curbe, pentru coarda de lungime C [m], ii
corespunde o sageata f= C2/(8 R) [m], Existenta unui cot continuu peste curba de baza s-a pus in evidenta prin masurarea unei sageti f1 , ceea ce conduce la o raza de curbura
R1, = C2/(8 f1). Un astfel de cot in cale, cu variatia continua a razei de curbura de la R la R1 si pastrarea suprainaltarii h duce la variatia insuficientei de suprainaltare
![]()
si la o acceleratie transversala suplimentara
![]()
Se considera ca pe curba de raz.a Rl apare un cot discontinuu, care s-a pus in evidenta prin masurarea unei diferente de sageti fd - f1 , unghiul δ fiind dat conform formulei.
Pentru studiul comportarii dinamice a vehiculului la intalnirea cotului discontinuu, trebuie mai intai determinata masa redusa a vehiculului in dreptul osiei atacante (fig. ..). Presupunand crapodina situata in centrul de masa al boghiului, se determina in acest punct masa redusa a cutiei mrc cu relatiei. Masa redusa a intregului vehicul va fi
in care mb reprezinta masa suspendata a boghiului iar ibx si ibz - razele de inertie ale boghiului
Fig. Vehicule pe boghuri - dimensiuni necesare
determinarii masei reduse
Cunoscand rigiditatea transversala a suspensiei osiei cy , se determina forta dinamica maxima Hd . Forta cvasistatica H care actioneaza asupra osiei va fi data de relatia
![]()
![]()
in care m0 reprezinta masa nesuspendata corespunzatoare unei osii 2 Q0 - sarcina pe osie si I insuficienta de suprainaltare pe curba de raza R.
Pentru a face verificarea la deripare a caii trebuie sa se tina seama de faptul ca aceasta este solicitata atat de forta Hmax ,cat si de forta de inertie a osiei
 Siguranta la deraiere a vehiculului
se verifica, pentru cele doua fire ale caii, cu conditia Hmax/ Q0
≤ (H/Q0)lim dupa ce in prealabil s-a determinat
transferul de sarcina ΔQ0.
Siguranta la deraiere a vehiculului
se verifica, pentru cele doua fire ale caii, cu conditia Hmax/ Q0
≤ (H/Q0)lim dupa ce in prealabil s-a determinat
transferul de sarcina ΔQ0.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3338
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved