| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
ELEMENTE DE MASURARE
Ø In prima faza de dezvoltare a automatizarilor s-au folosit sisteme de masurare specializate, in sensul ca valorile marimii de masurat se obtin intr-un domeniu de variatie ales arbitrar. De exemplu, pentru un domeniu de masurare al temperaturii cuprins intre 500 si 800 0C, semnalul obtinut la iesirea unui traductor variaza intre 0 si 100 mV, sau intre 0 si 500 mA etc. Pentru a fi adaptate la asemenea domenii de variatie, aparatele de masurare - indicatoare, inregistratoare etc., precum si regulatoarele, trebuie sa functioneze pentru aceleasi valori limita ale domeniului de masurare. In acest caz, aparatele de masurare si regulatoarele trebuie sa fie realizate "special" (specializate) pentru traductoarele corespunzatoare.
Ø In prezent, majoritatea sistemelor automate de masurare si control (precum si cele de reglare) sunt unificate, in sensul ca domeniul de variatie al semnalului din canalul de transmitere este standardizat (semnale unificate). De exemplu, pentru semnale electrice se foloseste domeniul de curent i=210mA c.c. sau i=420mA c.c., iar pentru semnale pneumatice se utilizeaza presiuni unificate p=210 daN/cm2.
Ø De exemplu, pentru un domeniu de variatie al presiunii masurate de 0-15 atm, traductorul elaboreaza la iesire un curent unificat i = 210mA c.c. (respectiv 0 atm => 2mA si 15 atm => 10 mA). Un asemenea sistem de semnal unificat la care pentru o marime de intrare nula se obtine un curent diferit de zero se numeste semnal unificat "cu zero viu". Ratiunea de a se folosi un semnal "cu zero viu" rezida in aceea ca un "zero real" poate sa insemne nu numai o intrare nula, dar si o defectare a sistemului de convertire a marimii masurate.
Ø Folosirea unor traductoare cu semnal de iesire unificat implica si utilizarea unor aparate de masurat sau regulatoare avand acelasi semnal de intrare unificat. Acest lucru prezinta un avantaj considerabil datorita faptului ca numarul tipurilor de aparate de pe panoul central este foarte redus (aparatura unificata). In acest caz, aparatura respectiva este mai usor de inlocuit.
Ø Procesul de unificare a aparaturii de automatizare se extinde si la alte semnale ca, de exemplu, unificarea parametrilor surselor de alimentare (f = 500 Hz, f = 1000Hz) etc., ceea ce implica o structura modulara a echipamentelor in ansamblul lor.
Elemente de executie (EE)
Notiuni generale
Ø Elementele de executie sunt componente ale sistemelor automate care primesc la intrare semnale de mica putere de la blocul de conducere si furnizeaza marimi de iesire, in marea majoritate a cazurilor, de natura mecanica (forte, cupluri) capabile sa modifice starea procesului in conformitate cu algoritmul de conducere stabilit.
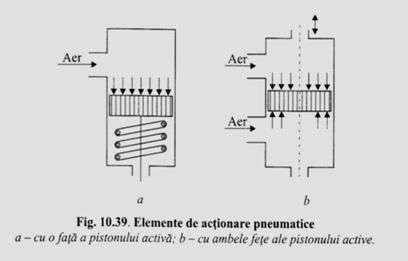
Ø Avand un dublu rol, informational si de vehiculare a unor puteri importante, elementele de executie au o structura complexa, reprezentand subsisteme in cadrul sistemelor automate. In general, elementul de executie este format din doua parti distincte: motorul de executie ME (numit si servomotor) si organul de executie OE (fig. a)
Adaptarea dintre regulatorul automat RA si elementul de executie EE se poate realiza prin intermediul unui convertor electro-hidraulic E/H ( fig.b)
Clasificarea elementelor de executie
|
Motor de executie |
Electric |
Motor rotativ |
De curent alternativ |
|
De current continuu |
|||
|
Solenoid |
|||
|
Pneumatic sau Hidraulic |
Cu membrana |
||
|
Cu piston |
Cu 2 fete active |
||
|
Cu o fata activa |
|||
|
Cu distribuitor |
|||
|
Mixt |
|||
|
Organ de executie |
Electric |
Reostat |
|
|
Intrerupator |
De joasa tensiune |
||
|
De inalta tensiune |
|||
|
Neelectric |
Robinet |
Cu dubla actiune |
|
|
Cu simpla actiune |
|||
|
Vana |
Clapeta |
||
|
Plana (fluture) |
|||
Ø Relatia care se stabileste intre marimile Xm de la iesirea EE (marimea de executie) si Xc marimea de intrare a EE (provenita de la regulator) defineste comportarea EE in regim stationar. Raportul dintre aceste marimi, pentru orice valoare a lui Xc, ar fi ideal sa fie constant, dar intervin in cursul functionarii EE anumiti factori care influenteaza marimea Xm (reactii ale mediului ambiant, greutati neechilibrate etc.).
Ø EE poate actiona asupra modificarii de energie in doua moduri:
Continuu, daca marimea m poate lua orice valoare cuprinsa intre doua valori limita;
Discontinuu, daca marimea m poate fi modificata numai pentru doua valori limita (dintre care cea inferioara este in general zero).
Ø Daca interventia asupra organului de executie se realizeaza manual, partea motoare ME nu mai este necesara.
Ø Dupa natura sursei de energie folosite pentru alimentarea partii motoare ME, EE se pot clasifica in:
Electrice;
Pneumatice
Hidraulice
1. Actionarea electrica a EE
Ø Actionarea electrica a organelor de executie se realizeaza cu electromagneti sau cu motoare electrice de curent continuu sau de curent alternativ.
Ø Folosind electromagneti, se obtine o actionare discontinua, bipozitionala, intrucat se pot obtine la iesire doua pozitii stationare (inchis-deschis, dreapta-stanga); trecerea de la o stare la alta se face intr-un timp scurt.
Ø Pentru organele de executie de putere mica se folosesc in general motoare bifazate (asincrone) cu rotorul in scurtcircuit, iar pentru organe de executie de puteri mari, motoare trifazate cu rotorul in scurtcircuit.
Ø Se construiesc servomotoare asincrone in urmatoarele variante: cu o singura rotatie, cu mai multe rotatii sau cu o cursa rectilinie. Cele cu mai multe rotatii, la care cursa completa a elementului de reglare corespunde cu cateva rotatii ale arborelui de iesire, se folosesc mai frecvent pentru actionarea robinetelor sau a supapelor regulatoare.
Ø La servomotoarele cu miscare rectilinie, arborele de iesire este inlocuit printr-o tija, a carei cursa completa corespunde cu cursa completa a elementului de reglare. Parametrii principali, in functie de care se aleg elementele, sunt: cuplul de rotatie la arborele de iesire sau forta la dispozitivul cu cursa rectilinie si durata unei rotatii complete a arborelui de iesire sau a unei curse complete a tijei.
Ø Actionarile electrice cu motoare se impart in doua grupe:
Cu viteza constanta;
Cu viteza variabila.
Ø Pentru comanda motoarelor bifazate si trifazate asincrone se folosesc bobine de reactanta cu saturatie (amplificatoare magnetice).
Ø Din punct de vedere constructiv, partea motoare a EE este construita din doua subansambluri independente:
Amplificatorul de executie;
Motorul de executie.
Ø In cazul motoarelor de curent continuu, comanda se poate face in doua moduri:
Variind curentul de excitatie si mentinand constant curentul din indusul motorului;
Variind curentul din indusul motorului si mentinand constant curentul de excitatie.
Ø In general, in SRA se intrebuinteaza metoda a doua, pentru ca pierderile de energie sunt mai mici. Aceste motoare sunt folosite mai ales in SRA in care parametrul legat este turatia sau un cuplu.
Ø Avantajele utilizarii servomotoarelor de c.c. decurg din cerintele de functionare ale acestora:
Posibilitatea de reglaj in limite largi;
Stabilitate a vitezei;
Putere de comanda mica;
Cuplu de pornire si viteza de raspuns mare.
Ø Dezavantajul folosirii motoarelor de c.c. il constituie aparitia scanteilor la colector in timpul comutatiei, facandu-l nefolosibil in medii inflamabile sau explozive, precum si producerea de perturbatii radiofonice.
Actionarea pneumatica a EE
Motoarele de executie pneumatice se folosesc foarte mult pentru ca prezinta urmatoarele avantaje:
Fluidul folosit (aerul) nu prezinta pericol de incendiu;
Dupa utilizare, aerul este evacuat in atmosfera, nefiind necesare conducte de intoarcere ca la cele hidraulice;
Pierderile de aer in anumite limite, datorate neetanseitatii, nu produc deranjamente;
Sunt simple, robuste, sigure in functionare si necesita cheltuieli de intretinere reduse.
Ø Dezavantajele acestor motoare sunt urmatoarele:
Viteza de raspuns este mica (in medie 1/3 - 1/4 din viteza de raspuns a motoarelor hidraulice);
Precizia motoarelor pneumatice este redusa.
Ø Se recomanda folosirea servomotoarelor pneumatice in urmatoarele cazuri:
Servomotorul are greutate redusa;
Temperatura mediului ambiant este ridicata si cu variatii mari;
Mediul ambiant este exploziv;
Nu se cere precizie mare;
Nu se cer viteze de lucru mari.
Ø Motoarele pneumatice pot fi liniare sau rotative. Cele liniare se pot realiza cu piston sau cu membrana.
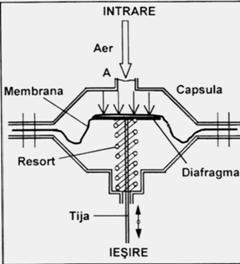
Element de actionare pneumatica
cu membrana
Ø Actionarile hidraulice au fost primele mecanisme din tehnica reglarii automate destinate reglarii proceselor. Prin dezvoltarea sistemelor electrice de reglare, folosirea elementelor hidraulice a scazut, datorita neajunsurilor elementelor hidraulice (lipsa posibilitatii de comanda la distanta, necesitatea etansarii ingrijite a corpurilor si conductelor, dependenta caracteristicilor de variatiile de temperatura ale mediului ambiant si necesitatea unei surse hidraulice).
Ø In ultimul timp, elementele hidraulice cunosc o larga raspandire, intrucat prezinta unele avantaje fata de cele electrice, de exemplu: banda mare de trecere (frecvente ridicate de lucru), raport putere/gabarit maxim, lipsa in majoritatea cazurilor a unui reductor de iesire si varietatea mare a formelor de miscare a axului de iesire (rotativ, oscilant, liniar).
Ø Caracteristicile statice principale ale elementelor de actionare hidraulice sunt caracterizate de viteza si de forta care determina viteza de iesire si forta dezvoltata de motorul de executie in functie de elementul de comanda. Folosind presiuni inalte se pot comanda EE pana la 200m, fara pierderi importante de presiune.
Ø Deosebit de eficienta este hidraulica atunci cand trebuie actionate, in acelasi timp, mai multe EE (de exemplu: macazurile folosite in transporturi etc.).
Ø In instalatiile de automatizare se folosesc, in majoritatea cazurilor, motoare hidraulice cu piston, care pot fi:
o Cu miscare liniara;
o Cu miscare de rotatie (limitata la un unghi de 1800).
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1521
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved