| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Evaluarea performantelor - automobil
1 Bilantul de tractiune si caracteristica fortei la roata
Caracteristica de tractiune sau caracteristica fortei la
roata
reprezinta curbele de variatie ale fortei la roata in functie de viteza de
deplasare a autovehiculului ![]() pentru fiecare treapta a cutiei de viteze
utilizata.
pentru fiecare treapta a cutiei de viteze
utilizata.
Construirea caracteristicii fortei la roata se face pe baza caracteristicii exterioare a motorului pornind de la curba puterii sau momentului utilizand relatiile:
![]() (1.1)
(1.1)
sau
![]() (1.2)
(1.2)
unde: M este momentul motor;
![]() este raportul de transmitere al transmisiei,
cand este cuplata treapta k de viteza cu raportul
este raportul de transmitere al transmisiei,
cand este cuplata treapta k de viteza cu raportul ![]()
![]() este randamentul
transmisiei;
este randamentul
transmisiei;
![]() raza dinamica a
rotii.
raza dinamica a
rotii.
Viteza de deplasare a autovehiculului se calculeaza cu relatia:
![]() (1.3)
(1.3)
unde n este turatia motorului corespunzatoare coordonatelor P sau M din caracteristica exterioara a motorului.
Forma caracteristicii fortei la roata este prezentata in figura 6.1.
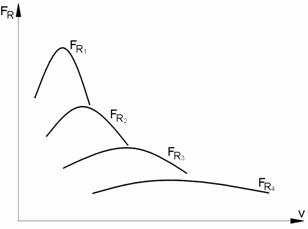
Fig.1.Caracteristica fortei la roata
Pentru
studiul performantelor automobilului la deplasarea pe un anumit drum,
caracterizat de o inclinare longitudinala ![]() si un coeficient de rezistenta la rulare f
caracteristica se completeaza si cu bilantul de tractiune dat de relatia:
si un coeficient de rezistenta la rulare f
caracteristica se completeaza si cu bilantul de tractiune dat de relatia:
![]() (1.4)
(1.4)
Pentru
o treapta a cutiei de viteze reprezentarea grafica a relatiei (6.4) este
prezentata in figura 6.2. Variatia parabolica a fortei la roata este
determinata de caracterul variatiei momentului motorului in functie de turatie.
Pentru aceasta reprezentare coeficientul rezistentei este considerat constant
(pentru viteze uzuale de deplasare) si de aceea rezistenta la rulare ![]() este reprezentata
printr-o dreapta orizontala, paralela cu axa absciselor. Rezistenta la urcarea
pantelor nu depinde de viteza, deci se reprezinta tot printr-o dreapta paralela
cu axa absciselor. Rezistenta aerului
este reprezentata
printr-o dreapta orizontala, paralela cu axa absciselor. Rezistenta la urcarea
pantelor nu depinde de viteza, deci se reprezinta tot printr-o dreapta paralela
cu axa absciselor. Rezistenta aerului ![]() se reprezinta
printr-o curba de gradul doi.
se reprezinta
printr-o curba de gradul doi.
La o viteza v oarecare segmentele marcate pe diagrama din figura 2. sunt proportionale cu urmatoarele forte:
![]() - rezistenta la rulare;
- rezistenta la rulare;
![]() - rezistenta la panta (
- rezistenta la panta (![]() rezistenta totala a
drumului cu resitenta specifica
rezistenta totala a
drumului cu resitenta specifica ![]()
![]() - rezistenta aerului;
- rezistenta aerului;
![]() - forta la roata.
- forta la roata.
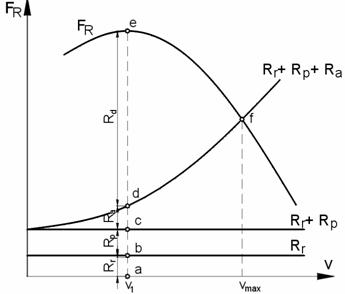
Fig.2.Caracteristica fortei la roata pentru o treapta a cutiei de viteze
Deoarece
forta la roata ![]() echilibreaza totdeauna suma fortelor de
rezistenta inseamna ca:
echilibreaza totdeauna suma fortelor de
rezistenta inseamna ca:
![]() - rezistenta la demarare.
- rezistenta la demarare.
Punctul
f unde ![]() caracterizeaza regimul la care autovehiculul
trece de la o miscare accelerata la una uniforma, a carei acceleratie este
egala cu zero. Rezulta ca abscisa
punctului f determina viteza maxima pe cale cu rezistenta specifica
caracterizeaza regimul la care autovehiculul
trece de la o miscare accelerata la una uniforma, a carei acceleratie este
egala cu zero. Rezulta ca abscisa
punctului f determina viteza maxima pe cale cu rezistenta specifica ![]()
|
FR1 |
FR2 |
FR3 |
FR4 |
FR5 |
V1 |
V2 |
V3 |
V4 |
V5 |
|
|
N |
m/s | |||||||||
|
| ||||||||||
2 Bilantul de putere si caracteristica puterilor
Caracteristica puterilor este reprezentarea grafica a bilantului de putere functie de viteza autovehiculului pentru toate treptele cutiei de viteze.
Bilantul
de putere al autovehiculului reprezinta echilibrul dinamic dintre puterea la
roata ![]() si suma puterilor necesare invingerii
rezistentelor la inaintare dat de relatia:
si suma puterilor necesare invingerii
rezistentelor la inaintare dat de relatia:
![]() (2.1)
(2.1)
unde:
P este puterea motorului (pe caracteristica exterioara sau caracteristica partiala pe care urmeaza a se face studiul);
![]() este randamentul transmisiei.
este randamentul transmisiei.
Reprezentarea grafica a relatiei (2.2) tinand cont de expresiile analitice ale puterilor functie de viteza pentru o treapta a cutiei de viteze este prezentata in figura 3.
Din reprezentarea grafica rezulta ca la o viteza v oarecare, segmentele marcate sunt proportionale la scara coordonatelor cu urmatoarele puteri:
![]()
![]()
![]()
![]()
![]()
![]()
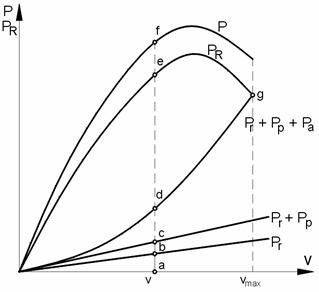
Fig.3.Caracteristica puterii la roata.
Abscisa
punctului g, unde ![]() determina viteza maxima la deplasarea pe o
cale cu rezistenta specifica.
determina viteza maxima la deplasarea pe o
cale cu rezistenta specifica.
Deoarece
studiul performantelor autovehiculului se face pe o cale orizontala in stare
buna se propune pentru caracteristica puterilor forma din figura 5., unde cu ![]() s-a notat puterea consumata pentru invingerea
rezistentei la rulare pe cale orizontala buna considerata cu un coeficient al
rezistentei la rulare
s-a notat puterea consumata pentru invingerea
rezistentei la rulare pe cale orizontala buna considerata cu un coeficient al
rezistentei la rulare ![]()
Deci:
![]()
In acest caz segmentele marcate sunt proportionale dupa cum urmeaza:
![]()
![]()
![]()
![]()
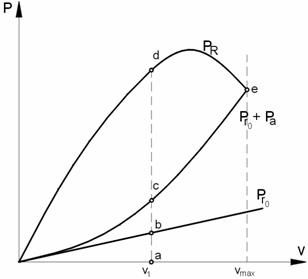
Fig.5.Caracteristica puterii la roata.
unde ![]() este o putere numita excedentara fata de
deplasarea cu viteza constanta pe calea data (sau disponibila). Aceasta putere
este utilizata de automobil in urmatoarele scopuri:
este o putere numita excedentara fata de
deplasarea cu viteza constanta pe calea data (sau disponibila). Aceasta putere
este utilizata de automobil in urmatoarele scopuri:
sporirea maxima a vitezei;
invingerea rezistentelor maxime ale caii re rulare;
sporirea vitezei si invingerea rezistentelor caii.
Forma caracteristicii puterilor este prezentata in figura 6.
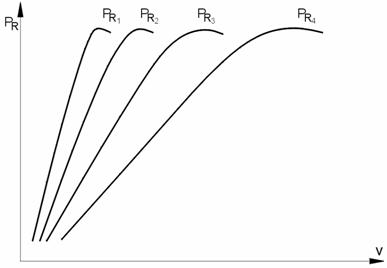
Fig.6. Caracteristica puterilor la roata
|
PR1 |
PR2 |
PR3 |
PR4 |
PR5 |
V1 |
V2 |
V3 |
V4 |
V5 |
|
|
[kw] |
m/s | |||||||||
|
| ||||||||||
3. Acceleratia automobilului si caracteristica acceleratilor
Acceleratia automobilului caracterizeaza in general calittile lui de demarare, deoarece, in conditii egale cu cat acceleratia este mai mare, cu atat creste viteza medie de exploatare.
Pentru determinarea acceleratiei, precum si pentru studiul performantelor de demarare se considera autovehiculul in miscare rectilinie, pe o cale orizontala, in stare buna, cu un coeficient mediu al reistentei la rulare f.
In aceste conditii puterea
excedentara ![]() ce va fi utilizata numai pentru accelerare.
ce va fi utilizata numai pentru accelerare.
Deci : ![]() (3.1)
(3.1)
de unde se obtine pentru acceleratia medie :
![]() (3.2)
(3.2)
Avand in vedere schimabarea coeficientului de influenta al maselor aflate in miscare de rotatie relatia (6.18) devine pentru acceleratiile automobilului in treptele cutiei de viteze :
![]() (3.3)
(3.3)
unde ![]() este
coeficeintul de influenta al maselor in miscare de rotatie cand in transmisie
este cuplata treapta k de viteza.
este
coeficeintul de influenta al maselor in miscare de rotatie cand in transmisie
este cuplata treapta k de viteza.
Daca se reprezinta grafic relatia (3.3) in functie de viteza autovehiculului se obtine un grafic ca cel din figura 6.15.
Figura 3.1. Caracteristica acceleratiilor
O asemenea reprezentare poarta numele de caracteristica acceleratiilor.
De asemenea pentru determinarea caracteristicii acceleratiilor poate fi folosita caracteristica dinamica.
In acest caz se obtine :
![]()
|
a1 |
a2 |
a3 |
a4 |
a5 |
V1 |
V2 |
V3 |
V4 |
V5 |
|
[m/s^2] |
[m/s^2] |
[m/s^2] |
[m/s^2] |
[m/s^2] |
m/s |
m/s |
m/s |
m/s |
m/s |
|
| |||||||||
4 Timpul si spatiul de demarare
Timpul de demarare
Timpul de
demarare reprezinta timpul necesar pentru ca autovehiculul sa-si sporeasca
viteza de la valoarea minima in prima treapta (![]() ) pana la
valoarea maxima in ultima treapta (
) pana la
valoarea maxima in ultima treapta (![]() )
)
Pornind de a expresia acceleratiei automobilului:
![]() (1)
(1)
se poate scrie:
![]() (2)
(2)
de unde se observa ca timpul de demarare ![]() , necesar
cresterii vitezei intre
, necesar
cresterii vitezei intre ![]() si
si ![]() se obtine rezuma la integrarea relatiei :
se obtine rezuma la integrarea relatiei :
 (3)
(3)
Pentru
efectuarea integrarii numerice prin metoda trapezelor, utilizand metoda
trapezelor, datorita existentei in relatia (6.24) a termenului ![]() se construieste mai intai caracteristica
inversului acceleratiilor
se construieste mai intai caracteristica
inversului acceleratiilor
Figura 1. Caracteristica inversului acceleratiilor
Se unesc curbele ![]() prin punctele in care are loc schimbarea
treptelor de viteza si se obtine astfel o curba continua ce va fi folosita
pentru integrarea numerica a relatiei (3).
prin punctele in care are loc schimbarea
treptelor de viteza si se obtine astfel o curba continua ce va fi folosita
pentru integrarea numerica a relatiei (3).
Figura 2. Caracteristica inversului acceleratiilor
Abscisa ![]() se imparte
in 'n' intervale echidistante de valoare
se imparte
in 'n' intervale echidistante de valoare ![]() .
.
Figura 3. Calculul numeric al timpului de demarare.
Metoda trapezelor.
Fiecarei
valori a vitezei ![]() ,
, ![]() ii corespunde pe ordonata
ii corespunde pe ordonata ![]() valoarea respectiva
valoarea respectiva ![]() ,
, ![]() . Timpul
de crestere al vitezei cu
. Timpul
de crestere al vitezei cu ![]() in intervalul de viteze
in intervalul de viteze ![]() va fi :
va fi :
![]()
Daca intr-un
sistem de axe se iau in abscisa vitezele pana la care se face demararea, iar in
ordonata timpul necesar de demarare pentru fiecare viteza se obtine o
caracteristica ![]() , numita caracteristica timpului de demarare.
, numita caracteristica timpului de demarare.
Figura Caracteristica timpului de demarare
Spatiul de demarare
Spatiul de demarare reprezinta distanta parcursa de autovehicul in timpul de demarare.
Pornind de la
definitia vitezei ![]() se
deduce :
se
deduce :
![]() (4)
(4)
sau tinand seama ca ![]() :
:
![]() (5)
(5)
Determinarea spatiului de demarare se obtine prin integrarea uneia dintre relatiile (4) sau (5).
In cazul utilizarii relatiei (5) pornind de la caracteristica timpului de demarare, aplicand metoda trapezelor se recomanda metodologia urmatoare :
Figura 5. Metoda trapezelor pentru determinarea spatiului de demarare.
Se
imparte ordonata ![]() in 'n' intervalle echidistante de
valori
in 'n' intervalle echidistante de
valori ![]() . Fiecarei
valori a timpului de demarare
. Fiecarei
valori a timpului de demarare ![]() ii corespunde pe abscisa
ii corespunde pe abscisa ![]() valoarea
respectiva
valoarea
respectiva ![]() .
.
Ca urmare
spatiul de demarare in intervalul ![]() va fi:
va fi:
![]() (6)
(6)
Pentru
demararea in timpul ![]() se obtine:
se obtine:
![]() (7)
(7)
unde: ![]() este pasul
de integrare ;
este pasul
de integrare ;
![]() valori ale vitezei corespunzatoare timpilor
valori ale vitezei corespunzatoare timpilor ![]() .
.
Aceste valori pot fi citite din caracteristicile timpului de demarare sau din tabloul in care au fost inscrise pentru trasarea caracteristicii timpului de demarare.
Daca intru-un
sistem de axe se iau in abscisa vitezele de demarare si in ordonata distantele
parcurse de automobil pana la atingerea acestor viteze se obtine o
caracteristica: ![]() numita caracteristica
spatiului de demarare.
numita caracteristica
spatiului de demarare.
Figura 6 Caracteristica spatiului de demarare
|
v |
1/a |
td |
sd |
|
m/s |
[1/m/s^2] |
s |
m |
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1625
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved