| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
MECANISME CU ROtI DINtATE
In functie de gradul de complexitate, se deosebesc trei tipuri principale de mecanisme sau transmisii cu roti dintate: 1) elementare, 2) simple si 3) complexe.
Un mecanism elementar cu roti dintate, denumit simplu si angrenaj, este format din doua roti, in angrenare, si un element suport-axe H, care materializeaza axele rotilor si mentine constanta distanta dintre acestea. Rotile unui angrenaj pot fi de forma circulara sau necirculara (eliptica, ovala, poligonala etc); deoarece au cea mai larga utilizare tehnica, in continuare sunt considerate numai angrenajele cu roti circulare. In tabelul 4.1 sunt sistematizate reprezentarile simplificate ale principalelor tipuri de angrenaje, cu roti circulare, folosite in tehnica. In functie de starea elementului H, un angrenaj poate fi: a) angrenaj cu axe fixe, daca elementul H este fix si b) angrenaj planetar, daca elementul H este mobil.
Un mecanism simplu cu roti dintate contine cel putin doua angrenaje si are un element suport-axe H unic; poate fi mecanism cu axe fixe, daca H este fix (v. fig. 4.1 si 4.7 ), sau mecanism planetar, daca H este mobil (v. tabelul 4.2 ).
Un mecanism complex cu roti dintate contine cel putin doua angrenaje si are cel putin doua elemente suport-axe Hj; j = 1,2,
In acest capitol sunt abordate, in interpretare inginereasca, urmatoarele doua probleme:
a) modelarea structurala, cinematica si statica a mecanismelor cu axe fixe (subcap.4.2), si
b) modelarea structurala, cinematica si statica a mecanismelor planetare simple, cu doua roti centrale (subcap. 4.3).
Pentru intuitivitate, rezolvarea problemelor enuntate se bazeaza pe utilizarea unor exemple aplicative reprezentative.
Obiective
Principalele obiective urmarite in acest capitol se refera la:
Identificarea marimilor de stare structurala, cinematica si statica ale mecanismelor cu axe fixe, de tip serie, paralel si mixt, si stabilirea proprietatilor caracteristice acestor mecanisme;
Definirea notiunii de unitate planetara si identificarea situatiilor structurale de functionare ale unei unitati planetare;
Identificarea marimilor de stare structurala, cinematica si statica ale unitatii planetare diferentiale si stabilirea proprietatilor caracteristice mecanismelor diferentiale.
Modelarea structurala, cinematica si statica a mecanismelor cu axe fixe
Tinand seama ca un angrenaj cu axe fixe este un mecanism monomobil (M = 1) cu o intrare si o iesire (L = 2), in continuare se propun doua aplicatii intuitive. Cu ajutorul acestor aplicatii se modeleaza, d.p.d.v. structural, cinematic si static, mecanismele cu axe fixe, de tip serie si, respectiv, paralel; pe baza interpretarii rezultatelor obtinute, se stabilesc apoi proprietatile cinematice si statice specifice acestor mecanisme.
Tabelul 4.1. Reprezentarea angrenajelor uzuale cu roti circulare
|
Angrenaj cilindric exterior |
a1 |
||
|
Angrenaj cilindric interior |
a2 |
||
|
Angrenaj conic (exterior) |
b |
||
|
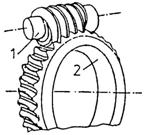
Angrenaj melcat |
c |
Modelarea mecanismelor de tip serie
Pentru modelarea mecanismelor cu axe fixe, de tip serie, se propune urmatoarea aplicatie:
Se dau:
Patru angrenaje cu axe fixe:
un angrenaj cilindric exterior (v. tab.4.1,a1), cu numerele de dinti z1 = 20, z2 = 40 si randamentul h
un angrenaj cilindric interior (v. tab.4.1,a2), cu numerele de dinti z3 = 20, z4 = 100 si randamentul h
un angrenaj conic (v. tab.4.1,b1), cu numerele de dinti z5 = 30, z6 = 30 si randamentul h
un angrenaj melcat (v. tab.4.1,c1), cu numerele de dinti z7 = 2 (inclinare: dreapta), z8 = 100 si randamentul h
Se cer:
Sa se reprezinte schema structurala si schema bloc a mecanismului generat prin cuplarea in serie a angrenajelor cu axe fixe date; sa se efectueze caracterizarea structurala a mecanismului realizat.
Sa se determine functia de transmitere a vitezelor realizata de mecanismul obtinut.
Sa se stabileasca functia de transmitere a momentelor, realizata de mecanismul obtinut, in urmatoarele premise:
a) se neglijeaza frecarea (h h h h = 1) si efectele inertiale ale maselor;
b) se considera frecarea (h h h h = 0,7) si se neglijeaza efectele inertiale ale maselor.
Sa se determine, pentru fiecare din premisele anterioare, parametrii de functionare ai masinii rezultate, din mecanismul realizat, prin cuplarea arborelui de intrare la un motor de curent continuu (m.c.c.) si a arborelui de iesire la un efector de tip troliu; se cunosc caracteristicile mecanice:
T w + 200 [Nm], pentru motor si
-T8 = 50 000 [Nm] constant, pentru efector.
Caracterizarea structurala a mecanismului rezultat prin cuplarea in serie a angrenajelor cu axe fixe
In fig. 4.1,a este ilustrata schema structurala a mecanismului rezultat prin inserierea celor patru angrenaje, iar alaturat sunt reprezentate sensurile pozitive ale directiilor descrise de axele rotilor. Dedesubt, in fig. 4.1,b, este ilustrata schema bloc corespunzatoare acestei inserieri. Mecanismul astfel obtinut este un mecanism simplu, cu axe fixe, deoarece are un element suport-axe unic (H s H1 s H2 s H3 s H4), care este fix (H s
Conform schemei bloc (fig. 4.1,b), prin inseriere, intre cele patru angrenaje, intervin Lc = 3 cuplari:
s w w s w w s w w
ca urmare, sistemul format din cele patru angrenaje, necuplate intre ele, are gradul de mobilitate SMj = M1 + M2 + M3 + M4 = 1 + 1 + 1 + 1 = 4, iar mecanismul, rezultat in urma cuplarii angrenajelor (fig. 4.1), are gradul de mobilitate:
M SMj - Lc = 4 - 3 = 1.
Aceasta inseamna ca mecanismul cu axe fixe generat (fig. 4.1,b) are o miscare exterioara independenta (de exemplu, w ) si un moment exterior dependent (de exemplu, T1 = T1( )); ca urmare, miscarea exterioara ramasa este dependenta (L - M = 2 - 1 = 1 =>w w w )), iar momentul exterior ramas este independent (L - M = 2 - 1 = 1 => T8 este independent).
a
b
Fig. Mecanism simplu cu roti dintate, generat prin inserierea a patru angrenaje cu axe fixe: a) schema structurala; b) schema bloc cu parametrii exteriori independenti si dependenti
In concluzie, d.p.d.v. calitativ, mecanismul din fig. 4.1 poate realiza o functie de transmitere pentru miscari:
w w w
si o functie de transmitere pentru momente:
T = T1(T8).
Determinarile cantitative ale acestor functii constituie obiective principale pentru modelarea cinematica si, respectiv, statica a mecanismului realizat (fig. 4.1).
Determinarea functiei de transmitere a vitezelor: w w w
Determinarea functiei de transmitere a vitezelor w w w ), se reduce la stabilirea raportului de transmitere i1,8, care prin definitie are expresia (v. fig.4.1):
![]() , (4.1)
, (4.1)
in care, prin ![]() s-a notat raportul de transmitere de la roata 1 la
roata 8, cand elementul H este fix. Tinand seama de cuplarile
dintre angrenaje (w2H w3H w4H w5H w6H w7H),
raportul cautat poate fi scris sub urmatoarea forma (fig.4.1):
s-a notat raportul de transmitere de la roata 1 la
roata 8, cand elementul H este fix. Tinand seama de cuplarile
dintre angrenaje (w2H w3H w4H w5H w6H w7H),
raportul cautat poate fi scris sub urmatoarea forma (fig.4.1):
![]() (4.2)
(4.2)
conform relatiei obtinute, raportul de transmitere al oricarui mecanism, rezultat prin inseriere, este egal cu produsul rapoartelor de transmitere ale mecanismelor inseriate.
Stiind ca raportul de transmitere al oricarui angrenaj cu axe fixe este egal cu raportul invers al numerelor de dinti, in urma inlocuirilor se obtine:

![]() (4.3)
(4.3)
aceasta inseamna ca la 500 de rotatii ale rotii 1, intr-un anumit sens (al axei sale), roata melcata 8 efectueaza o singura rotatie, in acelasi sens (al axei sale).
Din expresia raportului de transmitere calculat, rezulta functia de transmitere cautata:
 (4.4)
(4.4)
![]() (4.5)
(4.5)
functia de transmitere obtinuta arata ca mecanismul din fig. 4.1 este un reductor de turatie, care realizeaza la iesire o turatie de 500 de ori mai mica decat cea de la intrare.
Precizari privind stabilirea semnelor pentru rapoartele de transmitere ale angrenajelor cu axe fixe
In subcapitolul 2.3 s-a demonstrat ca raportul de transmitere al unui angrenaj cilindric cu axe fixe este egal cu raportul invers al numerelor de dinti: iH1,2 = w1H w2H z2/z1; semnul plus se refera la angrenajul interior (deoarece rotile conjugate se rotesc in acelasi sens), iar semnul minus, la angrenajul exterior (deoarece rotile conjugate se rotesc in sensuri inverse). In cazul angrenajelor cilindrice, stabilirea semnului este simpla, deoarece axele rotilor sunt paralele si, implicit, sensurile de rotatie ale rotilor pot fi comparate direct intre ele.
Proprietatea de mai sus ramane valabila si pentru angrenajele cu axe fixe neparalele, cu exceptia semnelor; in aceste cazuri, pentru stabilirea semnelor se propune urmatorul procedeu:
a) Se asociaza fiecarei directii distincte cate un sens pozitiv, dupa dorinta. O directie distincta poate fi definita de doua sau mai multe axe paralele intre ele sau de o axa unica; astfel, in fig. 4.1 se disting trei directii distincte: o directie definita de axele paralele ale rotilor 1, 2s3 si 4s5, o directie descrisa de axa rotilor 6s7 si o directie definita de axa rotii melcate 8. Odata alese, sensurile pozitive nu mai pot fi schimbate!
b) Se roteste una dintre rotile angrenajului in sensul pozitiv al axei sale si se stabileste intuitiv sensul de rotatie al rotii conjugate. Daca roata conjugata se roteste, de asemenea, in sensul pozitiv al axei proprii, raportul de transmitere are semnul plus; in caz contrar, are semnul minus (v. angrenajul conic 5-6 din fig. 4.1,a).
In cazul angrenajului melcat (v. angrenajul 7-8 din fig. 4.1,a), aplicarea procedeului impune rotirea melcului; pentru stabilirea intuitiva a sensului de rotatie a rotii melcate, melcul se asimileaza cu un surub cu axa fixa, iar zona de contact a rotii, cu o piulita de translatie. In cazul in care melcul are dinti inclinati spre stanga, pentru simplitate, se determina semnul raportului in premiza ca melcul are inclinarea spre dreapta si apoi se schimba semnul.
Stabilirea functiei de transmitere a momentelor T1 = T1(T8)
a) Se stabileste mai intai functia de transmitere a momentelor, in premisa neglijarii frecarii (h h h h = 1) si a efectelor inertiale ale maselor; conform fig. 4.1, in aceasta premisa, din ecuatia de echilibru a puterilor rezulta urmatoarea expresie a functiei de transmitere:
![]() (4.6)
(4.6)
 (4.8)
(4.8)
Functia de transmitere obtinuta arata ca reductorul de turatie din fig. 4.1 este, in acelasi timp, un amplificator de moment, care realizeaza la iesire un moment de 500 de ori mai mare decat momentul de intrare. Ca urmare, in premisa precizata, raportul de reducere a turatiei coincide cu raportul de amplificare a momentului!
b) In conditiile considerarii frecarii (h h h h = 0,7) si neglijarii efectelor inertiale ale maselor, functia de transmitere a momentelor se obtine din randamentul mecanismului-serie (fig. 4.1). Tinand seama ca in fig. 4.1:
w T2 + w T3 = 0, w T4 + w T5 = 0, w T6 + w T7 = 0, (4.9)
rezulta ca randamentul mecanismului-serie este egal cu produsul dintre randamentele angrenajelor inseriate:

![]() . (4.10)
. (4.10)
In conformitate cu relatia (4.10), in premisa considerarii frecarii, se obtine urmatoarea functie de transmitere a momentelor:
![]()
![]() (4.11)
(4.11)
 . (4.12)
. (4.12)
Asadar, spre deosebire de cazul precedent (in care turatia se reducea de 500 de ori si momentul se amplifica de tot atatea ori), in acest caz, turatia se reduce de 500 de ori si momentul se amplifica de numai 319,4 ori, datorita pierderilor prin frecare !
Concluzie
Frecarea modifica functia de transmitere a momentelor, lasand nemodificata functia de transmitere a miscarilor.
Parametrii de functionare ai masinii de tip motor-reductor-efector
Prin cuplarea arborelui de intrare al reductorului (fig. 4.1) la un motor de curent continuu (m.c.c.) si a arborelui de iesire la un efector de tip troliu, se obtine masina din fig. 4.2. Parametrii de functionare ai acestei masini, in faza de regim stationar (w = ?, T1 = ?, w = ? si T8 = ?), se obtin prin rezolvarea sistemului de ecuatii, format din functiile de transmitere ale reductorului si din ecuatiile care descriu caracteristicile mecanice ale motorului si efectorului; acesti parametri descriu punctul de functionare al masinii in regim stationar.
a) In premisa neglijarii frecarii si a efectelor inertiale ale maselor, se obtine urmatorul sistem de ecuatii:
 (4.13)
(4.13)
implicit, punctul de functionare are urmatorii parametri:
 (4.14)
(4.14)
Conform fig. 4,3, aceleasi valori pot fi obtinute grafic, intersectand caracteristica mecanica a motorului cu cea a efectorului redusa la arborele de intrare (exprimata in functie de T1):
-T8 = 50.000 [Nm] -T8 = 500T1 = 50.000 [Nm] T = 100 [Nm];
(4.15)
caracteristica efectorului, redusa la arborele de intrare, este descrisa prin relatia (4.15) si este reprezentata in fig. 4.3 cu linie continua.
Fig. Vedere de sus a
masinii formate prin cuplarea
arborelui de intrare al mecanismului (v. fig. 4.1) la un motor si
a arborelui de iesire la un efector.
Fig. Punctele de functionare A1 si A2 ale masinii din fig. 4.2, in regim stationar, determinate ca intersectie a caracteristicii mecanice a motorului (m) cu cea a efectorului, redusa la arborele de intrare: fara frecare (e1) si cu frecare (e2).
b) In premisa considerarii frecarii, sistemul de ecuatii (4.13) devine:
 (4.16)
(4.16)
si, implicit, parametrii punctului de functionare se modifica astfel:
 (4.17)
(4.17)
Conform fig. 4,3, aceleasi valori se obtin grafic, intersectand caracteristica mecanica a motorului cu cea a efectorului redusa la arborele de intrare (reprezentata cu linie intrerupta):
-T8 = 50.000 [Nm] -T8 = 319,4T1 = 50.000 [Nm]
T = 156,543 [Nm]. (4.18)
Din analiza comparativa a rezultatelor obtinute in cele doua cazuri (v. si fig.4.3) reiese ca frecarea influenteaza semnificativ parametrii punctului de functionare; conform fig.4.3, in prezenta frecarii, momentul motorului creste si, implicit, turatia acestuia scade.
Exemple de mecanisme cu axe fixe, de tip serie, aplicate in tehnica
In fig. 4.4, 4.5 si 4.6 sunt ilustrate, pentru exemplificare, trei solutii constructive de reductoare, cu axe fixe, in doua trepte (obtinute prin inserierea a doua angrenaje): varianta din fig. 4.4 reprezinta un reductor cilindric (obtinut prin inserierea a doua angrenaje cilindrice), solutia din fig. 4.5 reprezinta un reductor conico-cilindric (format prin inserierea unui angrenaj conic cu un angrenaj cilindric), iar aplicatia din fig. 4.6, se refera la un reductor cilindro-melcat (obtinut prin inserierea unui angrenaj cilindric cu un angrenaj melcat). Reprezentarea schemelor si determinarea functiilor de transmitere, ale acestor reductoare de turatie, se propun ca tema de casa; pentru rezolvare, se va utiliza, ca model, aplicatia precedenta.
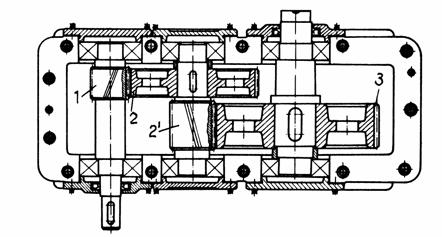
Fig. Reductor cilindric in doua trepte.
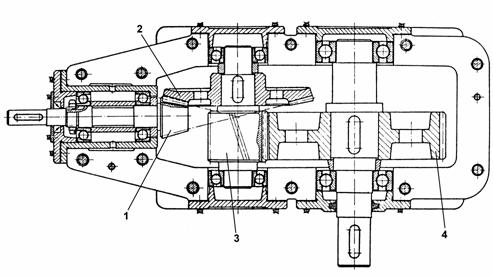
Fig. Reductor conico-cilindric.
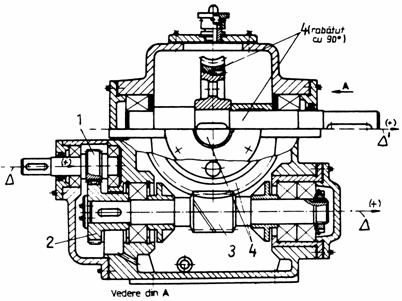
Fig. Reductor cilindro-melcat.
Tema de casa
Se dau:
1. Solutiile constructive a trei reductoare de turatie, cu axe fixe (fig. 4.4, 4.5 si 4.6), la care se cunosc numerele de dinti si randamentele angrenajelor componente:
a) z = 20, z2 = 60, z2' = 25, z3 = 75, h h = 0,97, pentru reductorul din fig. 4.4;
b) z = 20, z2 = 50, z2' = 20, z3 = 80, h h = 0,97, pentru reductorul din fig. 4.5 si
c) z = 30, z2 = 60, z2' = 3, z3 = 120, h = 0,97 si h = 0,7, pentru reductorul din fig. 4.6;
2. Ecuatiile caracteristicilor mecanice
ale motorului (care antreneaza fiecare reductor) si efectorului
(antrenat de fiecare reductor): T1 = -0,5w + 150 [Nm] si
-T3 = 1,2w
Se cer:
1. Reprezentarea schemei structurale si a schemei bloc; caracterizarea structurala a fiecarui reductor.
2. Determinarea functiei de transmitere a vitezelor, pentru fiecare reductor.
3. Determinarea functiei de transmitere a momentelor, pentru fiecare reductor (in regim stationar de functionare), in urmatoarele premise:
a) se neglijeaza frecarea (h h
b) se considera frecarea din angrenaje, prin intermediul randamentelor (h < 1; h < 1).
4. Stabilirea parametrilor de functionare, in regim stationar, ai fiecarei masini de tip motor-reductor-efector, in premisele a) si b); analiza comparativa si interpretarea rezultatelor obtinute.
Modelarea mecanismelor de tip paralel
Pentru modelarea mecanismelor cu axe fixe, de tip paralel, se propune urmatoarea aplicatie:
Se dau:
Doua angrenaje cilindrice exterioare 1-2 si 1'-2' (v. tab. 4.1,a1), cu axe fixe, care au numerele de dinti z1 = z1' = 20, z2 = 40, z2' = 80 si randamentul h h
Se cer:
Sa se reprezinte schema structurala si schema bloc a mecanismului generat prin cuplarea in paralel a angrenajelor date; sa se efectueze caracterizarea structurala a mecanismului realizat.
Sa se determine functiile de transmitere, realizate de mecanismul obtinut, pentru viteze si momente si sa se interpreteze rezultatele obtinute.
Sa se determine parametrii de functionare ai masinii rezultate, din mecanismul realizat, prin cuplarea arborilor de intrare (1 si 1') la cate un motor de curent continuu (m.c.c.) si a arborelui de iesire (2 s s q) la un efector de tip troliu; se cunosc caracteristicile mecanice:
T w + 100 [Nm] si
T1' = - 0,5w + 100 [Nm], pentru motoare si
Tq = 400 [Nm] constant, pentru efector.
Caracterizarea structurala a mecanismului rezultat prin cuplarea in paralel a angrenajelor date
In fig. 4.7,a este ilustrata schema structurala a mecanismului rezultat prin conexiunea in paralel a celor doua angrenaje; alaturat, in fig. 4.7,b1 si b2, sunt ilustrate schemele bloc corespunzatoare acestei conexiuni, pentru cele doua cazuri posibile de functionare: cu doua intrari si o iesire (b1); cu o intrare si doua iesiri (b2). Mecanismul astfel obtinut este un mecanism simplu, cu axe fixe, deoarece are un element suport-axe unic (H s H1 s H2), care este fix (H s
Conform schemei bloc (fig.4.7,b1 sau b2), conexiunea realizata, introduce, intre cele doua angrenaje, o singura cuplare:
Lc s s q w w wq
ca urmare, sistemul format din cele doua angrenaje, necuplate intre ele, are gradul de mobilitate SMj = M1 + M2 = 1 + 1 = 2, iar mecanismul, rezultat in urma cuplarii angrenajelor (fig. 4.7), are gradul de mobilitate:
M SMj - Lc = 2 - 1 = 1. (4.19)
Aceasta
inseamna ca mecanismul generat (fig. 4.7,b1 si
b2) are o miscare
exterioara independenta (de exemplu, wq) si un moment exterior dependent (de
exemplu, Tq = Tq( )); ca urmare,
miscarile exterioare ramase sunt dependente (L-M = 3-1 = 2 => w w wq) si w w wq)), iar momentele
exterioare ramase sunt independente
(L-M = 3-1 = 2 => T1 si T1'
sunt independente).
In concluzie, d.p.d.v. calitativ, mecanismul din fig. 4.7 poate realiza doua functii de transmitere pentru miscari:
w w wq) si w w wq
si o functie de transmitere pentru momente:
Tq = Tq(T1, T1').
a
 b1 b2
b1 b2
Fig. Mecanism simplu cu roti dintate, generat prin legarea in paralel a doua angrenaje cilindrice cu axe fixe: a) schema structurala; b1) si b2) schemele bloc, cu parametrii exteriori INDEPENDENTI si DEPENDENTI, in cele doua cazuri de circulatie ale fluxurilor energetice: cu doua intrari si o iesire (b1); cu o intrare si doua iesiri (b2).
Determinarile cantitative ale acestor functii constituie obiective principale pentru modelarea cinematica si, respectiv, statica a mecanismului-paralel realizat (fig. 4.7).
Determinarea functiilor de transmitere pentru viteze
Determinarea functiilor de transmitere pentru viteze, w w wq) si w w wq), se reduce la stabilirea rapoartelor de transmitere i1,q si i1'q (v. fig. 4.7):
![]()
![]()
![]()
![]() .
.
Ca urmare, transmiterea miscarilor prin mecanismul-paralel din fig. 4.7 se realizeaza pe baza urmatoarelor functii de transmitere:
![]() (4.20)
(4.20)
![]()
Interpretare
Mecanismul monomobil (M = 1) cu trei legaturi exterioare (L = 3), din fig. 4.7, are o miscare exterioara independenta (wq) pe care o distribuie in mod determinat pe celelalte legaturi exterioare (w si w
Determinarea functiei de transmitere pentru momente.
a) Se stabileste mai intai functia de transmitere a momentelor, in premisa neglijarii frecarii (h h = 1) si a efectelor inertiale ale maselor; conform fig. 4.7, in aceasta premisa, din relatiile (4.20) si (4.21) si din ecuatia de echilibru a puterilor rezulta urmatoarea expresie a functiei de transmitere:
![]()
![]()
![]()
![]()
![]() . (4.22)
. (4.22)
b) In conditiile considerarii frecarii (h h = 0,95) si neglijarii efectelor inertiale ale maselor, din fig. 4.7,b1 si b2 rezulta:
![]()
![]() ;
;
![]() ;
;
![]() ; (4.23)
; (4.23)
ca urmare, se obtine urmatoarea functie de transmitere a momentelor:
![]() (4.24)
(4.24)
Interpretari
Din comparatia relatiilor (4.22) si (4.24) rezulta ca diferentele 2T1 - 1,9T1 = 0,1T1 si 4T1' - 3,8T1' = 0,2T1' reprezinta momentele, date de cele doua motoare, pentru invingerea frecarii.
In conformitate cu relatia (4.24), mecanismul monomobil (M = 1) cu trei legaturi exterioare (L = 3) are urmatoarele proprietati statice:
a) poate insuma (v. fig. 4.7,b1) doua momente exterioare independente (T1 si T1'), conform functiei de transmitere (4.24), oferind un moment exterior "suma" (Tq) sau
b) poate distribui (v. fig. 4.7,b2) un moment exterior (Tq), in mod nedeterminat, pe celelalte legaturi exterioare ale mecanismului (T1 si T1').
Proprietatea a) este folosita in cazul actionarii unui efector cu doua motoare (fig. 4.7,b1); astfel de aplicatii se regasesc in tehnica la actionarea unei elice de vapor cu doua motoare (v. fig. 4.8), precum si la actionarea elicei principale a unui elicopter cu doua turbine. Proprietatea b) s-a utilizat frecvent in tehnica primelor decenii de industrializare, la actionarea a doua sau mai multe masini unelte de la un motor unic cu abur (fig. 4.7,b2).
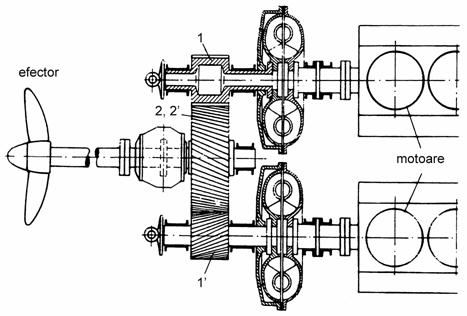
Fig. Exemplu de mecanism simplu cu roti dintate, generat prin legarea in paralel a doua angrenaje cilindrice cu axe fixe, utilizat la antrenarea cu doua motoare a elicei unui vapor.
Punctul de functionare al masinii formate din 2 motoare, mecanism si efector
Prin cuplarea arborilor de intrare 1 si 1', ai mecanismului-paralel (fig. 4.7,a si b1), la cate un motor si a arborelui de iesire q la un efector, se formeaza o masina (fig. 4.9). Parametrii de functionare ai acestei masini, in faza de regim stationar (w = ?, T1 = ?, w = ?, T1' = ?, wq = ? si Tq = ?), se obtin prin rezolvarea sistemului de ecuatii, alcatuit din functiile de transmitere ale mecanismului-paralel si din ecuatiile care descriu caracteristicile mecanice ale motoarelor si efectorului; acesti parametrii descriu punctul de functionare al masinii in regim stationar.
Fig. Vedere de sus a masinii formate prin cuplarea a doua motoare si a unui efector la mecanismul-paralel din fig. 4.7,a si b1.
a) In premisa neglijarii frecarii si a efectelor inertiale ale maselor, se obtine urmatorul sistem de ecuatii:
 (4.25)
(4.25)
implicit, punctul de functionare are urmatorii parametri:
 (4.26)
(4.26)
Conform fig. 4.10, aceleasi valori pot fi obtinute grafic, intersectand caracteristica mecanica a efectorului cu caracteristica mecanica suma a celor doua motoarelor, redusa la arborele de iesire (exprimate in functie de Tq):
![]() ; (4.27)
; (4.27)
Caracteristica-suma a celor doua motoare, redusa la arborele de iesire, este descrisa prin relatia (4.27) si este reprezentata in fig. 4.10 cu linie continua.
b) In premisa considerarii frecarii, sistemul de ecuatii (4.25) devine:
 (4.28)
(4.28)
si, implicit, parametrii punctului de functionare se modifica astfel:
Fig. Punctele de functionare A1 si A2 ale masinii din fig. 4.9 (v. si fig. 4.7,a si b1), in regim stationar, determinate ca intersectie a caracteristicii efectorului (e) cu caracteristica-suma a motoarelor, redusa la arborele de iesire: fara frecare ( m1) si cu frecare ( m2).
 (4.29)
(4.29)
Conform fig. 4.10, aceleasi valori pot fi obtinute grafic, intersectand caracteristica mecanica a efectorului (Tq = 400 [Nm] = const.) cu suma celor doua caracteristici mecanice ale motoarelor, redusa la arborele de iesire (exprimata in functie de Tq):
![]()
![]() ; (4.30)
; (4.30)
caracteristica-suma a celor doua motoare, redusa la arborele de iesire, este descrisa prin relatia (4.30) si este reprezentata in fig. 4.10 cu linie intrerupta.
Din analiza comparativa a rezultatelor obtinute in cele doua cazuri (v. si fig. 4.10) reiese ca frecarea influenteaza semnificativ parametrii punctului de functionare; conform fig. 4.10 si a relatiilor (4.26) si (4.29), in prezenta frecarii, momentele de actionare ale motoarelor cresc.
Precizare
In mecanismele de tip paralel, fiecare ramura energetica strabate cate un angrenaj distinct. Spre deosebire de acestea, in mecanismele de tip mixt, cel putin o ramura energetica strabate doua sau mai multe angrenaje; asa de exemplu, daca in mecanismul-paralel din fig. 4.7,a se introduce un angrenaj suplimentar, pentru antrenarea arborelui rotii 1, se obtine un mecanism-mixt. Modelarea mecanismelor de tip mixt ramane insa aceeasi cu cea a mecanismelor de tip paralel.
Tema de casa
Se dau:
a) Varianta constructiva a unei masini, cu doua motoare, pentru antrenarea elicei unui vapor (fig. 4.8);
b) Numerele de dinti si randamentele angrenajelor: z1 = z1' = 30, z2 = z2' = 120, 1,2 = 1',2' = 0,96;
c) Caracteristicile mecanice ale motoarelor cu ardere interna: T1 = 30 [Nm] = const.; T1' = 30 [Nm] = const.;
d)
Caracteristica mecanica a efectorului (propulsorului cu elice):
-Te = 10e ; e
= 2 = 2'.
Se cer:
1. Schema structurala si schema bloc a mecanismului cu roti dintate, cu precizarea legaturilor exterioare si a parametrilor exteriori independenti si dependenti; tipul mecanismului si functiile de transmitere, in exprimare calitativa.
2. Determinarea functiilor de transmitere a vitezelor si interpretarea acestora, in conditiile masinii din fig. 4.8.
3. Stabilirea functiei de transmitere a momentelor, in regim stationar de functionare, si interpretarea acesteia, in conditiile masinii din fig. 4.8.
4. Stabilirea grafica si analitica a punctului de functionare al masinii, in regim stationar.
Modelarea structurala, cinematica si statica a mecanismelor planetare simple
Generic, prin mecanisme planetare se inteleg mecanisme cu roti dintate, in care miscarea dintre roti este similara cu cea a planetelor fata de soare; ca urmare, un mecanism planetar are atat roti solare (sau centrale), ale caror axe sunt fixe, cat si roti-satelit, ale caror axe sunt mobile.
Cele mai simple mecanisme planetare sunt denumite unitati planetare si constituie module de sinteza, in conceperea de mecanisme planetare, cu diverse grade de complexitate.
Prin unitate planetara se intelege un mecanism, cu roti dintate, care indeplineste urmatoarele trei conditii:
are un element suport-axe unic H (suport pentru axele tuturor rotilor), denumit uneori si brat port-sateliti;
Precizare
Axa fixa de rotatie a bratului H desemneaza axa centrala a unitatii planetare; implicit, rotile ale caror axe coincid cu axa centrala sunt denumite roti centrale (sau solare), iar celelalte roti sunt denumite sateliti.
are una sau maxim doua roti centrale (daca intervin trei sau mai multe roti centrale, atunci sunt doua sau mai multe unitati, ale caror brate Hj sunt solidarizate intre ele, j = 1, 2, 3,.);
prin unitatea cu axe fixe, rezultata din unitatea planetara prin inversiunea miscarii fata de H, puterea circula neramificat (pe o singura ramura);
Precizari
a) Inversiunea miscarii, fata de H, inseamna aplicarea unei miscari, egale si de sens invers cu miscarea bratului H, tuturor elementelor unei unitatii planetare; in acest fel, bratul H devine fix si, implicit, unitatea planetara devine unitate cu axe fixe. Deci, expresia planetar inseamna H-mobil, iar expresia cu axe fixe inseamna cu H-fix.
b) Daca prin unitatea cu axe fixe, obtinuta prin inversiunea miscarii, puterea circula ramificat (prin S 2 ramuri), atunci exista S unitati identice legate in paralel.
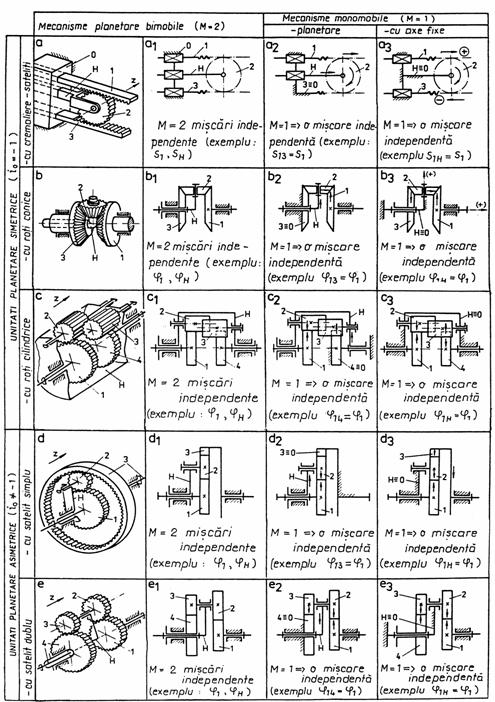
In tabelul 4.2 sunt sistematizate principalele unitati planetare cu doua roti centrale, utilizate frecvent in tehnica; pentru fiecare unitate, in tabel sunt ilustrate situatiile structurale de functionare. Conform tab. 4.2, o unitate planetara are trei situatii structurale posibile de functionare:
a) unitate planetara bimobila (sau diferentiala), care are M = 2 si L = 3 si se recunoaste prin aceea ca are bratul H si cele doua roti centrale mobile (v. tab. 4.2, schemele a1,.,e1);
b) unitate planetara monomobila, care are M = 1 si L = 2 si se recunoaste prin aceea ca are o roata centrala fixa (v. tab. 4.2, schemele a2,.,e2);
c) unitate cu axe fixe, care are M = 1 si L = 2 si se recunoaste prin aceea ca are elementul H fix (v. tab. 4.2, schemele a3,.,e3).
Comentarii
Dintr-o unitate planetara diferentiala (bimobila) pot fi obtinute:
a) o unitate cu axe fixe, prin inversiunea miscarii fata de bratul H si
b) o unitate planetara monomobila, prin inversiunea miscarii fata de o roata centrala;
ca urmare, in cele trei unitati, vitezele absolute sunt diferite, in timp ce vitezele relative si momentele raman neschimbate.
Dintre cele trei situatii structurale de functionare ale unei unitati planetare (v. tabelul 4.2), numai unitatea cu axe fixe are o modelare cinematica simpla, de tipul celei prezentate in subcapitolul anterior (4.1).
In continuare, se prezinta principalele particularitati cinematice si statice ale unitatilor planetare, cu doua roti centrale, cu ajutorul urmatoarei aplicatii:
Se dau:
a) unitatea planetara diferentiala (bimobila), ilustrata in schema b din tab. 4.2;
b) numerele de dinti ale rotilor dintate: z1 = z3 = 60, z2 = 30.
Se cer:
Schema structurala si schema bloc, cu precizarea calitativa a functiilor de transmitere realizate de unitatea planetara bimobila.
Schema structurala si schema bloc, corespunzatoare
unitatii cu axe fixe (rezultata din unitatea planetara
diferentiala prin inversiunea miscarii fata de
bratul H); calculul
raportului de transmitere al unitatii cu axe fixe ![]() .
.
Determinarea ecuatiei de viteze a unitatii planetare bimobile; explicitarea functiei de transmitere a vitezelor si interpretarea acesteia.
Schema structurala si schema bloc, corespunzatoare
unitatii planetare monomobile, rezultate din unitatea bimobila
prin blocarea rotii centrale 3; calculul functiei de transmitere a
vitezelor si a raportului de transmitere ![]() .
.
Determinarea functiilor de transmitere a momentelor, realizate de unitatea planetara diferentiala, si interpretarea acestora.
Tabelul Unitati planetare si situatii structurale de functionare ale acestora
Parametrii punctului de functionare, in regim stationar, al masinii obtinute prin cuplarea unitatii planetare diferentiale cu doua motoare de curent continuu si cu un efector de tip troliu; motoarele, de caracteristici mecanice: T1 = -0,5w + 35 [Nm] si T3 = -0,5w + 40 [Nm], sunt cuplate la arborii rotilor centrale 1 si respectiv 4, iar tamburul troliului este materializat prin elementul H si are caracteristica mecanica: TH -60 [Nm] constant.
Schema structurala si schema bloc, cu precizarea calitativa a functiilor de transmitere realizate de unitatea planetara bimobila
In fig. 4.11,a s-a ilustrat schema structurala a unitatii planetare bimobile, iar alaturat, in fig.4.11,b, s-a reprezentat schema bloc, cu legaturile exterioare si parametrii exteriori ai acestora; deoarece are gradul de mobilitate M = 2, unitatea planetara are doua miscari exterioare independente (de exemplu, cele incadrate in fig. 4.11,b) si, implicit, doua momente exterioare dependente (de exemplu, cele notate in fig. 4.11,b cu semne de intrebare). Ca urmare, unitatea planetara diferentiala realizeaza, calitativ, urmatoarele functii de transmitere:
wH wH w w (4.31)
T = T1(TH) = ?, (4.32)
T = T3(TH) = ?. (4.33)
Unitatea cu axe fixe, rezultata din
unitatea planetara prin inversiunea miscarii fata de
bratul H, si calculul raportului de transmitere i = ![]()
In
fig. 4.11,c s-a ilustrat schema structurala a unitatii cu axe fixe,
rezultata din unitatea planetara bimobila (fig. 4.11,a)
prin inversiunea
a b
 c d
c d
e f
Fig. Schemele
structurale si schemele bloc ale situatiilor structurale de
functionare derivate din unitatea planetara cu roti conice: a,b)
unitatea planetara diferentiala (bimobila); c,d) unitatea
cu axe fixe obtinuta din unitatea planetara
diferentiala prin inversiunea miscarii fata de H;
e,f) unitatea planetara monomobila, rezultata din unitatea
planetara diferentiala prin blocarea rotii centrale 3.
miscarii fata de H (imprimand intregii unitati planetare bimobile o miscare egala si de sens invers cu cea a elementului H, se obtine mecanismul cu axe fixe din fig. 4.11,c); alaturat, in fig. 4.11,d, s-a reprezentat schema bloc a unitatii cu axe fixe si s-au precizat parametrii exteriori independenti si dependenti. Prin inversiunea miscarii s-au modificat numai vitezele absolute, in timp ce momentele si vitezele relative au ramas aceleasi!
Pentru mecanismul cu axe fixe, astfel obtinut (fig. 4.11,c), se poate scrie urmatorul raport de transmitere:
 ; (4.34)
; (4.34)
aceasta inseamna ca, in mecanismul cu axe fixe (fig. 4.11,c), rotile 1 si 3 au turatii egale, dar de sensuri contrare.
Raportul
i0 = ![]() este denumit uzual raport cinematic interior al
unitatii planetare, iar unitatile planetare cu raportul
interior i0 = -1 sunt denumite unitati planetare simetrice; celelalte unitati
planetare (care au i0 -1) sunt denumite unitati
asimetrice.
este denumit uzual raport cinematic interior al
unitatii planetare, iar unitatile planetare cu raportul
interior i0 = -1 sunt denumite unitati planetare simetrice; celelalte unitati
planetare (care au i0 -1) sunt denumite unitati
asimetrice.
Ecuatia de viteze a unitatii planetare bimobile si functia de transmitere a vitezelor
Pe baza relatiei de calcul a vitezelor relative (wx,y wx wy) si in conformitate cu fig. 4.11,a si c, raportul interior poate fi exprimat in functie de vitezele unghiulare ale unitatii bimobile:
![]()
![]() ; (4.35)
; (4.35)
in urma calculelor, s-a obtinut ecuatia de viteze a unitatii planetare bimobile (4.35). Din aceasta ecuatie se expliciteaza functia de transmitere a vitezelor, realizata de unitatea planetara bimobila (v. fig. 4.11,a si b):
![]() .
.
Din interpretarea functiei de transmitere obtinute, decurg urmatoarele doua proprietati cinematice:
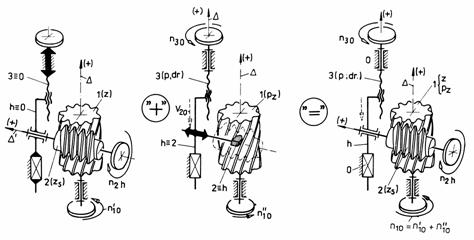
Unitatea planetara diferentiala (cu M = 2 si L = 3) poate "insuma" doua miscari exterioare independente (w si w ), dupa regula descrisa de functia de transmitere, rezultand o miscare exterioara "suma" (wH); aceasta proprietate este folosita uzual in masinile unelte de danturat, cu freza-melc, la prelucrarea rotilor cilindrice cu dinti inclinati (fig. 4.12 si 4.13).
Unitatea planetara diferentiala (cu M = 2 si L = 3) poate "distribui" o miscare exterioara (wH), in mod nedeterminat, in alte doua miscari exterioare (w si w ); aceasta proprietate este folosita in puntile motoare ale automobilelor (fig. 4.14 si 4.15), pentru eliminarea alunecarii dintre pneuri si drum, la deplasarea in curbe .
Exemple
Exemplul nr. 1: Se expliciteaza proprietatea 1), pe baza fig. 4.12 si 4.13, considerand urmatorul exemplu: pe roata semifabricat urmeaza sa se dantureze z1 = 20 dinti inclinati, cu pasul elicei pz = 1000 mm; pentru aceasta, masina unealta foloseste o freza-melc, cu z2 = 1 dinte, pe care o antreneaza cu o turatie n2h = 100 rot/min (fig. 4.13,a si c) si ii imprima un avans vertical v20 = 10 mm/min (fig. 4.13,b si c).
Pe de o parte, conform fig. 4.13,a, masina unealta trebuie sa antreneze roata semifabricat cu o turatie:
n = n2h(z2/z1) = 100(1/20) = 5 rot/min,
pentru ca freza sa taie in roata cei 20 de dinti; pe de alta parte, conform fig. 4.13,b, masina unealta trebuie sa antreneze roata semifabricat cu o turatie:
n = v20/pz = 10/1000 = 0,01 rot/min,
pentru ca un dinte al frezei sa taie in roata un gol dupa o elice cu pasul pz = 1000 mm.
a
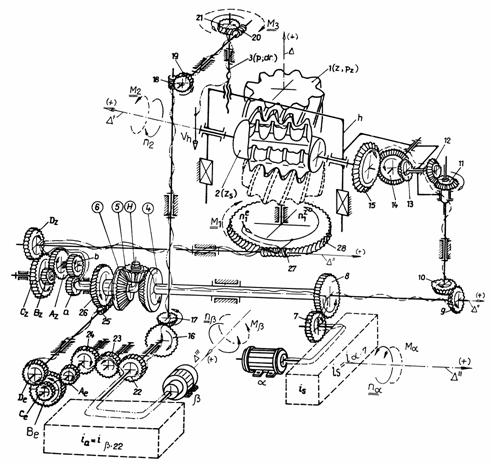
a1
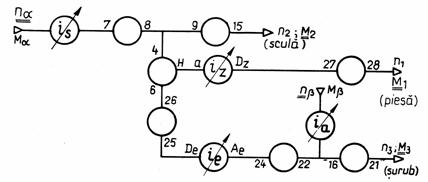
Fig. Schema structurala (a) si schema bloc (a1) ale unei masini de danturat cu freza melc, echipata cu mecanism diferential de insumare a miscarilor.
c c1 b a
b1 a1
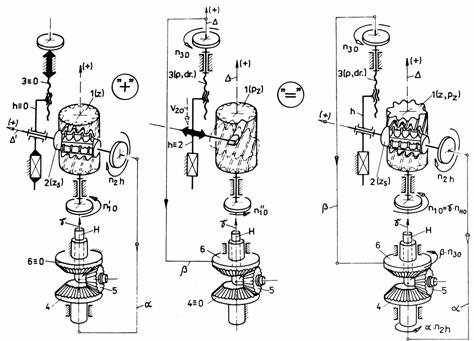
Fig. Exemple de utilizare a mecanismelor
diferentiale, ca "sumator" de miscari, pe masinile de
danturat, cu freza melc, la prelucrarea rotilor cilindrice cu
dinti inclinati: a, a1) ilustrarea turatiei
semifabricatului ![]() , care asigura realizarea numarului de dinti;
b, b1) ilustrarea turatiei semifabricatului
, care asigura realizarea numarului de dinti;
b, b1) ilustrarea turatiei semifabricatului ![]() , care asigura realizarea elicei de pas pz;
c, c1) ilustrarea "insumarii" turatiilor
, care asigura realizarea elicei de pas pz;
c, c1) ilustrarea "insumarii" turatiilor ![]() si
si ![]() cu ajutorul
unitatii planetare diferentiale.
cu ajutorul
unitatii planetare diferentiale.
Ca urmare, pe masina unealta, roata semifabricat trebuie sa efectueze simultan ambele miscari:
n = n'10+ n"10;
conform fig.4.13,a1,b1 si c1, insumarea acestor miscari poate fi realizata cu ajutorul unitatii planetare diferentiale 4-5-6-H (fig. 4.13,c1).
Exemplul nr. 2: Se expliciteaza proprietatea 2), pe baza fig. 4.14, considerand urmatorul exemplu: la deplasarea unui autocamion intr-o curba (de raza R), puntea motoare (fig. 4.14,a) efectueaza, impreuna cu sasiul camionului, o miscare de rotatie, in jurul axei verticale care trece prin punctul O, cu o viteza unghiulara W; ca urmare, centrele rotilor motoare A si C au viteze diferite (fig. 4.14,a):
vA = (R-0,5b)W w'r vC = (R+0,5b)W w"r.
In aceste conditii, rularea fara patinare, a pneurilor pe drum, este posibila daca vitezele unghiulare ale rotilor realizeaza raportul:
w w" = vA / vC = (R-0,5b) / (R+0,5b).
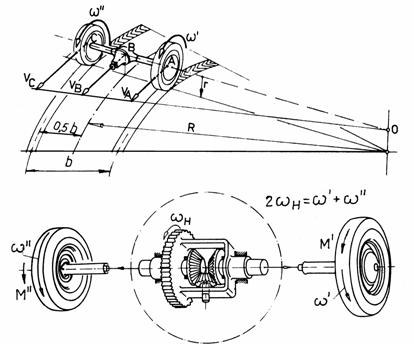
Fig. Scheme pentru
justificarea utilizarii mecanismelor diferentiale
inter-roti, din puntile motoare ale automobilelor: a) cinematica
rotilor motoare la deplasarea in
curbe; b) exemplu de mecanism diferential inter-roti.
Deoarece curbele pot avea diverse raze R, raportul w w" poate lua orice valoare. Cu alte cuvinte, viteza unghiulara wH, cu care este antrenata puntea motoare (fig. 4.14,b), trebuie distribuita pe rotile motoare (w' si w") in mod nedeterminat (dupa cum cer curbele); aceasta distributie nedeterminata se realizeaza, conform fig. 4.14,b, cu ajutorul unui mecanism diferential simetric inter-roti.
In mod analog se justifica necesitatea utilizarii mecanismului diferential asimetric inter-punti (fig. 4.15), in cazul automobilelor cu doua punti motoare.
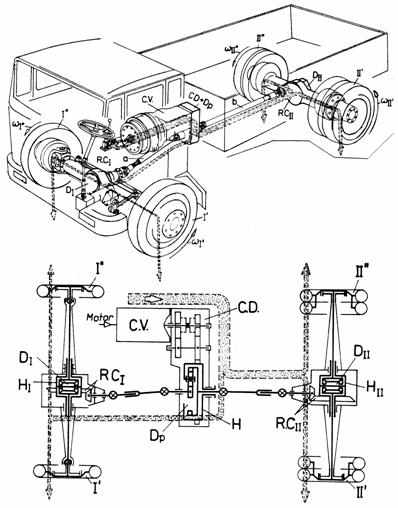
Fig. Exemplu de utilizare a mecanismelor diferentiale inter-roti (DI si DII), intr-un camion cu doua punti motoare (44).
Functia si raportul de transmitere realizate prin blocarea unei roti centrale
Conform fig. 4.11,a, b si e, f, prin blocarea rotii centrale 3 (w = 0), unitatea planetara bimobila devine unitate planetara monomobila (cu M = 1 si L = 2). Ca urmare, functia de transmitere a vitezelor, realizata de unitatea planetara monomobila (fig. 4.11,e si f), poate fi obtinuta din functia de transmitere a unitatii planetare diferentiale, prin particularizarea w
![]() =>
=>
![]() ; (4.37)
; (4.37)
deoarece roata 3 a devenit baza, vitezele w si wH au devenit w si respectiv wH
Din functia de transmitere a vitezelor (4.37), se obtine raportul de transmitere (fig. 4.11,e si f):
![]() ; (4.38)
; (4.38)
aceasta inseamna ca la doua rotatii ale rotii 1, fata de roata fixa 3, bratul H efectueaza o singura rotatie, in acelasi sens.
Functiile realizate de unitatea planetara diferentiala pentru transmiterea momentelor
In premisa ca unitatea planetara diferentiala functioneaza in regim stationar fara frecare, conform fig. 4.11,b, poate fi scrisa urmatoarea ecuatie de echilibru a puterilor :
![]() . (4.39)
. (4.39)
Tinand seama ca wH w /(1- i0) - w i0/(1-i0), din ecuatia (4.39) se obtine urmatoarea egalitate:
 . (4.40)
. (4.40)
Deoarece vitezele unghiulare w si w sunt independente (v. fig. 4.11,b), egalitatea (4.40) este adevarata numai daca parantezele, care descriu coeficientii acestor viteze, sunt nule; prin explicitarea acestora, se obtin urmatoarele functii de transmitere a momentelor:
 (4.41)
(4.41)
 (4.42)
(4.42)
Din interpretarea relatiilor (4.41) si (4.42), decurge urmatoarea proprietate referitoare la momente exterioare:
unitatea planetara diferentiala (v. fig. 4.11,a si b), cu trei intrari si iesiri (L = 3), are un moment exterior independent (TH) pe care il distribuie, in mod determinat, pe celelalte doua legaturi exterioare (T1 si T3).
Comentarii
In premisa precizata, functiile de transmitere a momentelor, realizate de unitatea planetara diferentiala (fig. 4.11,a si b), raman valabile si pentru mecanismele generate din aceasta unitate prin inversiunea miscarii:
a) unitatea cu axe fixe (fig. 4.11,c si d), rezultata prin inversiunea miscarii fata de H si
b) unitatea planetara monomobila (fig. 4.11,e si f), rezultata prin inversiunea miscarii fata de roata centrala 3.
Pentru verificare, se propune urmatoarea tema de casa: sa se determine functia de transmitere a momentelor pentru unitatea cu axe fixe din fig. 4.11,c si d si, de asemenea, pentru unitatea planetara monomobila din fig. 4.11,e si f, in premisa functionarii in regim stationar fara frecare.
Comparand proprietatile cinematice si statice ale mecanismului cu M = 1 si L = 3 (fig. 4.7) cu cele ale mecanismului cu M = 2 si L = 3 (fig. 4.11,a si b), se observa ca acestea sunt "simetrice" intre ele: proprietatile statice ale unui mecanism se regasesc la celalalt ca proprietati cinematice si reciproc.
Concluzie: Insumarea a k miscari poate fi realizata cu un mecanism care are M = k si L = k+1, iar insumarea a k momente poate fi realizata cu un mecanism care are M = 1 si L = k+1.
Punctul de functionare al masinii formate prin cuplarea unitatii planetare diferentiale cu doua motoare si un efector
In conformitate cu fig. 4.16, se cere sa se determine punctul de functionare (in regim stationar, fara frecare) al masinii obtinute prin cuplarea unitatii planetare diferentiale (din fig. 4.11,a si b) cu doua motoare de curent continuu si cu un efector de tip troliu; conform fig. 4.16, motoarele, de caracteristici mecanice: T1 = -0,5w + 50 [Nm] si T3 = -0,5w + 50 [Nm], sunt cuplate la arborii rotilor centrale 1 si respectiv 3, iar tamburul troliului este materializat prin elementul H si are caracteristica mecanica: TH -60 [Nm] constant.
Ca si in cazurile precedente (prezentate in subcapitolul 4.2), parametrii punctului de functionare, al masinii din fig. 4.16, se stabilesc cu ajutorul sistemului de ecuatii format din:
a) functiile de transmitere ale unitatii planetare diferentiale
si
b) caracteristicile mecanice ale motoarelor si efectorului:
Fig. Exemplu de masina formata prin cuplarea unitatii planetare diferentiale (tab. 4.2,b,b1) cu doua motoare si un efector de tip troliu.
prin rezolvare, din sistemul (4.43) se obtin urmatoarele valori ale parametrilor care descriu punctul de functionare in regim stationar, fara frecare (v. fig. 4.16):
Pentru verificare, se recalculeaza suma puterilor de intrare si iesire, ale unitatii planetare diferentiale, care, in premisa considerata, trebuie sa fie nula:
w T1 + w T3 + wH TH =
(se verifica!).
Teme de casa
1) Se dau:
a) Unitatea planetara diferentiala, ilustrata in schema c a tabelului 4.2, si numerele de dinti ale rotilor: z1 = z4 = 60 si z2 = z3 = 30.
b)
Caracteristicile mecanice ale motoarelor cuplate cu rotile centrale 1
si 4:
T1 = -0,5w + 35 [Nm] si T4 =
-0,5w + 40 [Nm];
c) Caracteristica mecanica a troliului, a carui toba este solidara cu elementul H: TH -60 [Nm] constant.
Se cer:
Schema structurala si schema bloc, cu precizarea calitativa a functiilor de transmitere realizate de unitatea planetara bimobila.
Schema structurala si schema bloc, corespunzatoare
unitatii cu axe fixe (rezultata din unitatea planetara
diferentiala prin inversiunea miscarii fata de
bratul H); calculul
raportului de transmitere al unitatii cu axe fixe i0 =
![]() .
.
Determinarea ecuatiei de viteze a unitatii planetare bimobile; explicitarea functiei de transmitere a vitezelor si interpretarea acesteia.
Schema structurala si schema bloc, corespunzatoare
unitatii planetare monomobile, rezultate din unitatea bimobila
prin blocarea rotii centrale 4; calculul functiei de transmitere a
vitezelor si a raportului de transmitere ![]() .
.
Determinarea functiilor de transmitere a momentelor, realizate de unitatea planetara diferentiala, si interpretarea acestora.
Punctul de functionare, in regim stationar fara frecare, al masinii formate prin cuplarea unitatii planetare diferentiale cu cele doua motoare si cu efectorul de tip troliu.
2) Se dau:
a) Varianta constructiva a unui reductor planetar (fig. 4.17), ale carui roti centrale au 30 si respectiv 90 de dinti;
b) Caracteristica mecanica a motorului
de antrenare: T1 = -0,5w + 60 [Nm]
si caracteristica mecanica a troliului pe care reductorul il
antreneaza:
TH = - 120 [Nm].
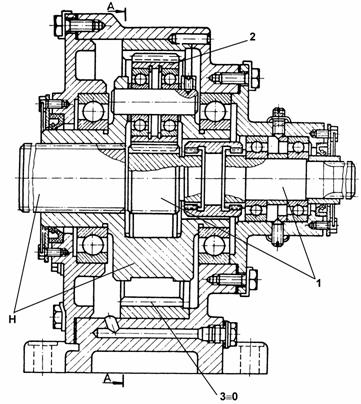
Fig. Exemplu constructiv de reductor planetar intr-o treapta.
Se cer:
Identificarea, pe baza tabelului 4.2, a tipului de unitate planetara monomobila folosita in reductorul din fig. 4.17.
Schema structurala si schema bloc, cu precizarea calitativa a functiilor de transmitere realizate de reductor.
Ecuatia de viteze a unitatii planetare diferentiale (rezultata prin deblocarea rotii centrale cu dantura interioara). Functia de transmitere a vitezelor si raportul de transmitere realizate de reductorul planetar dat.
Functia de transmitere a momentelor, realizata de reductor, in premisa functionarii in regim stationar fara frecare.
Punctul de functionare al masinii formata prin cuplarea reductorului cu motorul de antrenare si cu efectorul de tip troliu.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 9311
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved