| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Universitatea din Pitesti
Facultatea de Mecanica si Tehnologie
= Proiect =
Cuprins :
Se precizeaza ca mecanismul functioneaza in plan vertical. Se neglijeaza influenta frecarilor din cuplele cinematice. Proiectul are 2 parti:
I. Scrisa
II. Desen
Continutul partii scrise:
Analiza structurala a mecanismelor
Analiza rotabilitatii din cupla motoare
2.1. Stabilirea tipului elementului conductor
2.2. Macheta functionala
2.3. Determinarea experimentala pe macheta a marimii ciclului cinematic: jc [grade]
2.4. Determinarea tipului elementelor conduse in functie de miscarea executata
Analiza cinematica a mecanismului:
Se va face prin 2 metode:
a) metoda grafoanalitica
b) metoda analitica
Determinarea pozitiei elementelor si punctelor caracteristice ale mecanismului.
Schema cinematica a mecanismului la scara in pozitia:
a) initiala corespunzatoare: unghiul j [o]
b) unghiul j j jc
La fiecare pozitie figurata individual pe A3 se determina prin masurare si calcul:
unghiul elementelor conduse
coordonatele punctelor caracteristice
Traiectoria punctului caracteristic E pe ciclul cinematic incepand cu j cu pasul Dj ales convenabil pentru precizia curbei traiectoriei
a) Metoda grafica
b) Metoda analitica (program pe calculator)
b1) model grafic de calcul (desen)
b2) model analitic de calcul (formule)
b3) tabelul rezultatelor
b4) traiectoria trasata cu valorile din tabel
Calculul erorilor de pozitie prin metoda grafica comparativ cu cea analitica la pozitiile j si j
Determinarea vitezelor elementelor si punctelor caracteristice in pozitiile j si j
Metoda grafoanalitica
Metoda analitica
Calculul erorilor la viteze
Determinarea acceleratiilor elementelor si punctelor caracteristice in pozitiile j si j
Metode grafoanalitica
Metoda analitica
Calculul erorilor la viteze
Studiul unor solutii constructive similare mecanismului din tema (minimum 2):
desen
descrierea constructiva si functionare
utilizare
Analiza cinetostatica a mecanismului in j si j
grafoanalitic
analitic
5.1. Calculul fortelor si cuplurilor ce actioneaza pe elementele mecanismului
5.2. Determinarea reactiunilor din cuplele grupei structurale assur
5.3. Echilibrul elementului conducator
5.3.1. Reactiunea din cupla motoare
5.3.2. Momentul de echilibrare prin metoda cinetostatica
5.4. Calculul erorilor reactiunilor si momentului de echilibrare, comparativ metodei grafoanalitica cu cea analitica in pozitiile j si j
Continutul partii desenate:
Doua planse A3 cuprinzand fiecare:
a) schema cinematica conform 3.1.1. a si b
b) poligoanele de viteze conform 3.2.1.
c) poligoanele de forte conform 3.3.2 si 5.3.1.
![]()

![]()
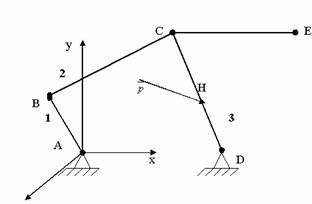
![]() Se da mecanismul de ghidare a punctului E a
carui schema cinematica este data in figura de mai jos :
Se da mecanismul de ghidare a punctului E a
carui schema cinematica este data in figura de mai jos :
Q
![]() C α
C α
E
![]() 2 β
2 β
B ![]()
1 3
![]()
![]()
![]()
![]()
![]()
![]()
![]() φ1
φ1
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() A D
A D
La acest mecanism se cunosc urmatoarele date :
|
Date |
II Walt |
AB [m] | |
BC |
4,54 x AB |
|
CD |
1,82 x AB |
|
AD |
1,64 x AB |
|
BE |
2,27 x AB |
|
CE |
1,22 x AB |
|
A | |
|
Q [N] | |
|
P [N] | |
|
α [ O] | |
|
β [ O] | |
|
CH |
0,6 x CD |
|
φ10 [O] | |
|
ω [rad/s] |
Mecanismul din figura are urmatoarele laturi cu lungimile :
AB = 0,35 [m]
BC = 1,54 x AB ; BC = 0,53 [m]
CD = 1,82 x AB ; CD = 0,63 [m]
AD = 1,64 x AB ; AD = 0,57 [m]
BE = 2,27 x AB ; BE = 0,79 [m]
CE = 1,22 x AB ; CE = 0,42 [m]
CH = 0,6 x CD ; CH = 0,37 [m]
Mecanismul functioneaza in plan vertical si se neglijeaza influenta frecari din cuplele acestui mecanism.
Cap I :
1.1. Schema cinematica a mecanismului :
![]()
 C E
C E
![]() y
y
2
![]()
![]() H
H
 B
B
1
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
 A
A
x D
z
1.2.1. Familia mecanismului : Axyz - fix
|
Element |
vx |
vy |
vz |
ωx |
ωy |
ωz |
|
X |
||||||
|
2 |
X |
X |
X |
|||
|
3 |
X |
f = 3
1.2. 2. Mobilitatea . Desmodromia .
MB= 3 x m - 1 x C4 - 2 x C5
m= 3 ; C4 = 0 ; C5 = 4
M3 = 3 x 3 - 2 x 4
M3 = 1
Rezulta mecanismul este desmodrom cu elementul conductor 1.
Schema structurala a mecanismului functional:
![]()
 E
E
C
![]()
![]() B
B
![]()
![]() ω1
ω1
![]()
![]()
Mec (1) A D
Determinarea numarului de contururi la mecanismul functional.
Se face pe baza schemei structurale a mecanismului cu relatia:
N = C - m
N - numarul contururilor
C - numarul cuplelor fundamentale
M - numarul elementelor mobile
![]() C = 4 ; m =
3 N
= 4-3
C = 4 ; m =
3 N
= 4-3
N = 1
Conturul este ABCDA
Descompunerea in grupe structurale:
 3
3
 C
C
![]()

![]() 1 2 C
1 2 C

![]()
 B E
B E
![]()
![]() ω1
ω1
![]()
![]()
![]() φ10 B
φ10 B
![]()
![]()
![]() Mec (1) A B
Mec (1) A B
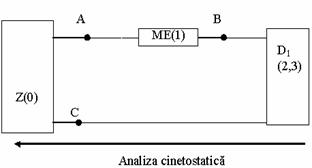
Schema multipolara. Relatia structurala.
 A B
A B
![]()
![]()
![]()
![]()
![]()
![]() ME(1)
ME(1)
D1
(2,3)
Z(0)
C
![]()
![]() Analiza cinematica
Analiza cinematica
![]()
Analiza cinetostatica
Relatia structurala este:
Z(0) + ME (1) + D1( 2,3 )
Analiza cinematica a mecanismului.
2.1. Analiza rotabilitatii din cupla motoare :
a) Rotabilitatea din cupla motoare A
S1 = AB + AD S1 = 0,92 [m]
D1 = ׀ AB -AD ׀ D1 = 0,22 [m]
S2 = BC + CD S2 = 1,16 [m]
D2 = ׀ BC - CD ׀ D2 = 0,1 [m]
Conditia de
rotabilitate :  AB - manivela
AB - manivela
b) Rotabilitatea din cupla D :
S3 = AD + CD S3 = 0,57
D3 = ׀ AD - CD ׀ D3 = 0,63
S4 = AB + BC S4 = 0,88
D4 = ׀ AB - BC ׀ D4 = 0,18
Conditia de rotabilitate :  DC - balansier
DC - balansier
c) Rotabilitatea din cupla B :
S5 = AB + BC S5 = 0,88
D5 = ׀ AB - BC ׀ D5 = 0,18
S6 = CD + AD S6 = 0,35
D6 = ׀ CD - AD ׀ D6 = 0,06
d) Rotabilitatea din cupla C :
S7 = BC +CD S7 = 1,16
D7 = ׀ BC - CD ׀ D7 = 0,1
S8 = AB + AD S8 = 0,92
D8 = ׀ AB - AD ׀ D8 = 0,22
Din studiul celor doua cuple rezulta ca BC este o biela care face o miscare oscilatorie.
2.2. Calculul scari :
Se alege scara: kl = ![]() =
= ![]() =
=
[AB] = ![]() ; AB = 50 mm .
; AB = 50 mm .
[BC] =![]() ; BC = 75 mm .
; BC = 75 mm .
[CD] = ![]()
![]() ; CD = 60 mm.
; CD = 60 mm.
[AD] = ![]() ; AD = 81 mm.
; AD = 81 mm.
[BE] = ![]() ; BE = 112 mm.
; BE = 112 mm.
[CE] = ![]() ; CE = 60 mm.
; CE = 60 mm.
[CH] = ![]() ; CH = 52 mm.
; CH = 52 mm.
2.3. Determinarea experimentala (pe macheta ) a marimi ciclului:
Elementul conducator este elementul 1, care face o miscare de rotatie completa. Rezulta ca marimea ciclului cinematic este de 360o.
c = 360o [grade]
2.4. Determinarea tipului elementelor conduse din punct de vedere al miscari executate.
Elementul conducator este biela BC, care face o miscare oscilatorie, realizata cu ajutorul manivelei AB care face miscare de rotatie completa.
Cap III.
Analiza cinematica a mecanismului
3.1. Determinare pozitiei elementelor si punctelor caracteristice ale mecanismului.
3.1.1. Schema cinematica a mecanismului la scara in pozitiile:
a. Initiala corespunzatoare unghiului ( 70o).
b. In pozitia φ1
φ1 = φ10 + ![]()
70
+ ![]() [grade]
[grade]
|
| ||||
3.1.2.b. Metoda analitica.
|
Punctele caracteristice |
X [mm] |
Y [mm] |
|
A | ||
|
B | ||
|
C | ||
|
D | ||
|
E |
Determinarea pozitiilor elementelor si punctelor caracteristice. Scriem ecuatia vectoriala de inchidere a conturului principal ABCD.
![]()
![]() y C
y C
![]()
![]() B φ2 E
B φ2 E
![]() ε1
ε1
![]()
![]() ω1 φ3
ω1 φ3
![]()
![]()
![]()
![]()
![]()
![]()
![]() A φ1
A φ1
![]()
![]()
![]()
![]() x
x
![]()
![]()
N = C - m ![]() N = 1
N = 1
![]() =
= ![]() +
+![]() (1)
(1)
![]() =
= ![]() +
+![]() (2)
(2)
![]()
 (6) si
(7)
(6) si
(7)
Necunoscutele sunt φ2 , φ3
AB2 cos2
φ1+BC2cos2 φ2+2AB![]() BC
cos φ1cos φ2 - - 2AB
BC
cos φ1cos φ2 - - 2AB![]() AD
cos φ1 - - 2BC
AD
cos φ1 - - 2BC![]() AD
cos φ2 = DC2 cos2 φ3 (8)
AD
cos φ2 = DC2 cos2 φ3 (8)
AB2sin2φ1+BC2sin2φ2+2AB![]() sin
φ1sin φ2=DC2sin2 φ3 (9)
sin
φ1sin φ2=DC2sin2 φ3 (9)
Din relatiile 8 si 9 rezulta:
AB2+BC2+AD2-2BC(AB
cosφ2-AD)cos φ2+2AB![]() BC
sin φ1sin φ2-1AB
BC
sin φ1sin φ2-1AB![]() AD
cos φ2
AD
cos φ2
A cos φ2+B sin φ2+C = 0
![]() ;
; ![]() ;
; ![]() (13)
(13)
Din 13 si 14:
![]()
-A t2 + C t + 2B t + C - A = 0
t2 ( C-A) + 2B t + C + A = 0
A = 2 . 0.35(0.35
A = -0.31
B = 2
B = 0.34
C = 0.125 + 0.34 - 0.39 + 0.28 - 2
C = 0.22
![]()
![]()
φ = 55o
Notam laturile mecanismului:
AB = l1 ; AB = 0.35
BC = l21 ; BC = 0.53
BE = l22 ; BE = 0.79
CD = l3 ; CD = 0.63
l1 cos φ1 + l3 cosφ3 - AD = -l21 cosφ2
l1 sin φ1 + l3 sin φ3 = -l21 sin φ2

l21(cos2φ1 + sin2 φ1) + l23(cos2 φ3 - sin2 φ3) - l221(cos2 φ2 + sin2 φ2)+cos φ3 (2 l1l3 cos φ1 -
-2 AD l3) + sin φ3 (2l1l2sin φ1) - 2AD l1cos φ1 = 0
l21 + l23 - l221 -2AD l1cosφ1 + cos φ3 [ 2 l3 ( l1cos φ1 - AD)] + sin φ3( 2 l1l3 sin φ1) = 0
cos φ3 A + sin φ3 B + C = 0
A = 2 l3 ( l1cos φ1 - AD) ; A = -0.98
B = 2 l1l3 sin φ1 ; B = 0.41
C = l21 + l23 - l221 +AD2 ; C = 0.57

Analog pentru pozitia φ1 = 190o rezulta : φ2 = 31o si φ3 = 35o .
3.2. Determinarea vitezelor elementelor si punctelor caracteristice in pozitiile φ10 si φ1.
3.2.1. Metoda grafoanalitica.
Pentru mecanismul R.R.R in pozitia φ10 = 70o
ω1 = 9![]()
vB = ω1
٠AB = 9 0.35
= 3.15![]()
kv = ![]() ; [vB] = 50 mm
; [vB] = 50 mm
![]() ;
; 
Din poligonul vitezelor rezulta vitezele vC si vCB
[VBC ] = 22 mm ; rezulta VBC = 22 * 0.06 =1.32
[VC ] = 32 mm ; rezulta VC = 32 * 0.06 =1.92
VCB = ω2 BC ; ω2 = ![]()
![]()
VC = ω3 CD ; ω3 = ![]()
![]()

Rezulta ca [vBE]
= 
Din poligonul vitezelor
rezulta [VE] =45 
![]()
DH = CD - CH
DH = 0.63 - 0.37 ; DH = 0.26
Pentru mecanismul R.R.R in pozitia φ1 = 190o .
![]() ;
;
Din poligonul vitezelor rezulta vitezele vC si vCB
[VBC ] = 29 mm ; rezulta VBC = 29 * 0.06 =1.74 ![]()
[VC ] = 36 mm ; rezulta VC = 36 *
0.06 = 2.16 ![]()
VCB = ω2 BC ; ω2 = ![]()
![]()
VC = ω3 CD ; ω3 = ![]()
![]()

Rezulta ca [vBE]
= 
Din poligonul vitezelor rezulta [VE] =10 mm
![]()
DH = CD - CH
DH = 0.63 - 0.37 ; DH = 0.26
3.2.2. Metoda analitica.
l1cosφ1 + l21cosφ2 + l3cosφ3 = AD
l1sinφ1 + l21sinφ2 + l3sinφ3 = 0 (1)
-l1ω1sinφ1 - l2ω2sinφ2 - l3ω3sinφ3 = 0
l1ω1cos φ1 + l2ω2cosφ2 + l3ω3cosφ3 = 0
Din relatia (1) rezulta:
ω2
= 2.29 ![]()

![]()
![]()
 vH = 4.65
vH = 4.65
|
vBx |
vBy |
vB |
vCx |
vCy |
vC |
vEx |
vEy |
vE |
vC1x |
vC1y |
vC1 |
vC2x |
vC2z |
vC2 |
w |
j |
|
3.2.3. Calculul erorilor la viteze in cele 2 pozitii:
|
uM j |
ew |
evB |
evC |
evE |
evC1 |
evC2 |
|
70o | ||||||
|
190o |
![]()
3.3. Determinarea acceleratiilor.
Metoda grafo-analitica
3.3.2. Metoda analitica
|
aBx m/s2 |
aBy m/s2 |
aB m/s2 |
aCx m/s2 |
aCy m/s2 |
aC m/s2 |
aEx m/s2 |
aEy m/s2 |
aE m/s2 |
aC1x m/s2 |
aC1y m/s2 |
aC1 m/s2 |
aC2x m/s2 |
aC2y m/s2 |
aC2 m/s2 |
e |
w |
j |
|
|
| ||||||||||||||||||
3.3.3. Calculul erorilor la acceleratii in pozitiile j = 700 si j
|
eaB |
eaE |
eaC |
eaC1 |
eaC2 |
ee |
|
Cap IV :
Studiul unor solutii constructive similare mecanismului din tema (minimum 2):
desen
descrierea constructiva si functionare
utilizare
Mecanism de tip R.R.R.
Mecanismul din figura 1 este folosit la ghidarea punctului M al macaralelor portuare. Punctul M trebuie sa se deplaseze orizontal.
Figura 1 (schema constructiva) Figura 2 (schema cinematica)
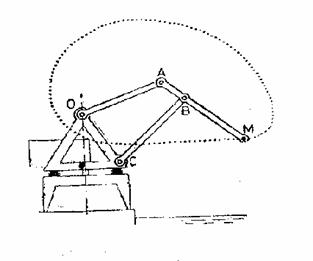
A
O' B
M
C
2. Mecanismul cu o oprire
Mecanismul din figura 3 este format din mecanismul RRRR la care s-a legat o diada RRR (diada MEF ). Pe portiunea superioara (arcul 1-3)curba de biela Г a punctului M poate fi aproximata cu un arc de cerc cu centru in E. Se plaseaza o cupla de rotatie in M si alta in E, obtinand elementul 4. Cupla exterioara F a diadei MEF, adaugata mecanismului elementar ABCD, se leaga adecvat la baza, obtinand mecanismul cu o oprire AVCDMEF.
M 2
4 C1
E
F
B
3
D
1
CAP. V:
Analiza cinetostatica a mecanismului in pozitiile j = 700 si j
5.1. Calculul fortelor si cuplurilor care actioneaza pe elementele mecanismului
5.1.1. Fortele de greutate
5.1.2. Fortele si cuplurile de inertie
a) Grafo-analitic in cele 2 pozitii
Forta de inertie a elementului f actioneaza in centrul de greutate al elementului f si este egala cu ![]() =
acceleratia centrului de greutate al acelui element, fiind paralela si de sens
opus cu
=
acceleratia centrului de greutate al acelui element, fiind paralela si de sens
opus cu ![]()
![]()
Momentul de inertie ce actioneaza asupra elementului f este egal cu produsul dintre momentul mecanic de inertie in raport cu centrul de greutate al elementului si acceleratia unghiulara fiind opus ca sens acceleratiei unghiulare ef
|
uM j |
N |
N |
N |
Nm |
Nm |
Nm |
b) Modelul analitic :
|
uM j |
N |
N |
N |
N |
N |
N |
N |
N |
N |
Nm |
Nm |
Nm |
5.2. Determinarea reactiunilor din cuple - fara frecare
a) Grafo-analitic in cele 2 pozitii
Se izoleaza diada (2,3) din mecanismul R.R.R.
Pentru mentinerea echilibrului in cuplele B, D de
rotatie se introduc reactiunile ![]() de directie oarecare. Pentru insusirea
acestora se descompun in
de directie oarecare. Pentru insusirea
acestora se descompun in ![]() =
=  si
si
Ecuatia vectoriala de echilibru este :
![]()
Daca ![]() este cu minus, in poligon se schimba sensul ales
arbitrar pe model.
este cu minus, in poligon se schimba sensul ales
arbitrar pe model.
Alegerea de reprezentare a fortelor din primul poligon (ce contine fortele din ecuatia de mai sus) KF1
![]()
Aleg scara de reprezentare a fortelor din cel de-al doilea poligon (ce contine fortele din ecuatia de mai sus): KF2 = 3 [N/mm]
![]()
la scara de reprezentare KF2
Din poligon ![]()
Motoelementul (1)
Aleg scara de reprezentare a fortelor KF3 = 2
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2610
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved