| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Mecanisme
Se da mecanismul cu schema cinematica din figura urmatoare:
Date de intrare
- constructive
AB
=
BC = 1,6 AB=0,48 m
CD = 2,2 AB=0,66 m
AD = 2,5 AB=0,75 m
MB = AB
- pozitional cinematice ale elementului conducator 1
![]()
 ,
cu
,
cu ![]() -
constant
-
constant
Date de iesire
Studiul a 3 mecanisme aplicate tehnic in constructia de masini:
schema aplicatiei
denumirea aplicatiei
descrierea functionarii aplicatiei
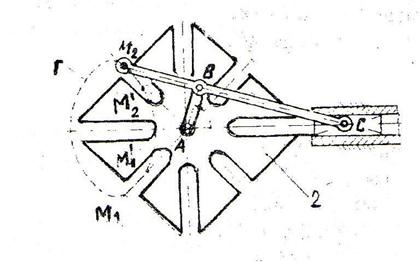
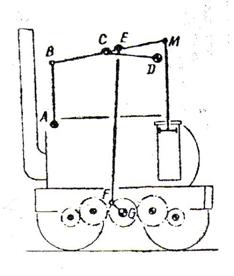
a) Discul de Malta cu 8 caneluri interioare
este antrenat prin mecanismul menivela-culisor ABCM, al carui punct M descrie
traiectoria ![]() cu portiunile rectilinii M2M21,
M1M11, ortogonale, coincidente cu axele
canelurilor.
cu portiunile rectilinii M2M21,
M1M11, ortogonale, coincidente cu axele
canelurilor.
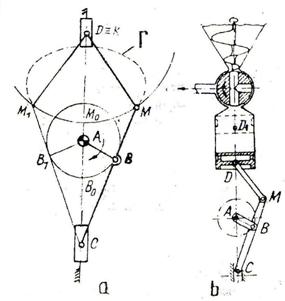
b) In figura a) s+a reprezentat schema cinematica a unui mecanism cu oprire, iar in figura b) este reprezentata o aplicatie a acestuia la un dozator automat.In timp ce punctul de biela M parcurge portiunea de cerc MM0M1, adica in timp ce cupla D coicide cu centrul cercului K.
c) Locomotiva cu doi cilindri verticali asezati lateral, construita in 1813 de Puffing Billy, sunt utilizate doua mecanisme cu Watt-Evans dublu-balansier identice, ABCD, asezate lateral, in care punctul de ghidare rectiliniar al tijei pistonului este M.Miscarea punctului M al balansierului BCM, prin biela MF se transforma in miscare de rotatie continua a manivelei FG, care o transmite la roata dintata concentrica cu ea si apoi la rotile motoare, prin intermediul angrenajelor.
Analiza structurala a mecanismului din tema
Analiza cinematica a mecanismului in ![]() (grafo-analitica)
(grafo-analitica)
3.1 Schema cinematica
- coordonatele punctelor caracteristice
- unghiurile de pozitie ale elementelor 2 si 3
3.2 Vitezele
3.3 Acceleratiile
Partea grafica cuprinde fise cu schemele celor 3 mecanisme (capitolul I) si o plansa care detine :
schema la scara a mecanismului
poligonul vitezelor
poligonul acceleratiilor
Capitolul II: Analiza structurala
2.1. Schema cinematica a mecanismului
2.2. Familia
|
Elemente |
|
|
|
|
|
|
|
|
|
|
x |
|||
|
x |
x |
x |
||||
|
x |
||||||
|
f=3 |
||||||
2.3. Mobilitatea mecanismului
![]()
![]()
![]()
![]()
![]() ;
;
![]()
![]() ;
;
![]()
![]()
![]()
![]()
2.4. Interpretarea rezultatului
![]() mecanismul
este dezmodrom cu elementul conducator 1.
mecanismul
este dezmodrom cu elementul conducator 1.
2.5. Schema structurala a mecanismului fundamental
Partea II. Organe de masini
Sa se proiecteze elementele componente ale unei transmisii mecanice de reducere a turatiei care face parte din lantul cinematic de antrenare a gaterului in industria lemnului
Transmisia va avea urmatoarele componente inseriate :
Ø motor electric asincron trifazat cu rotorul in scurtcircuit ;
Ø transmisie cu curele trapezoidale ;
Ø reductor cu un angrenaj cilindric exterior cu roti drepte.
Schema cinematica a transmisiei este prezentata in figura 1.
ME - motor electric ;
TCT - transmisie cu curele trapezoidale ;
RC - reductor cilindric cu o treapta ;
I, II, III - arborii transmisiei ;
z1 - pinionul ;
z2 - roata dintata condusa ;
C - cuplaj ;
ML - masina de lucru.
Date de proiectare :
Denumirea masinii antrenate: Gater in industria lemnului
Puterea
utila necesara la arborele III: ![]()
Turatia necesara la arborele III: ![]() rot/min
rot/min
Raportul
de transmitere nominal al reductorului: ![]()
Durata zilnica de functionare a transmisiei: Dzilnica ore
Durata totala de functionare a angrenajului: Lh = 10 000 ore
Regimul de lucru al masinii antrenate: socuri medii
Factorul de suprasarcina la pornire: KA = 1,8
Capitoul I. Studiul a trei variante de reductoare cu o treapta
Reductor cu roti dintate cilindrice cu o treapta :
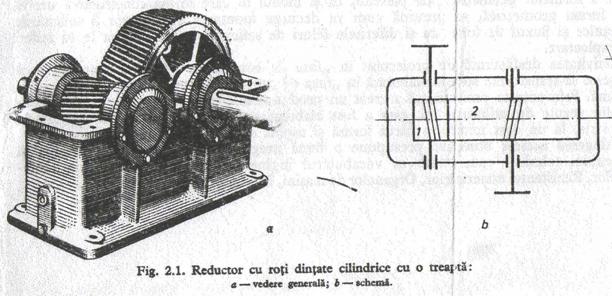
Reductoarele cu o treapta (fig.2.1.), sunt folosite pentru puteri pana la 515 KW, cand ungerea se face prin barbotare si pana la 950 KW, cand ungerea este fortata.Randamentul este 0,98.0,99 in cazul variantei cu roti cu dinti drepti sau inclinati si 0,97.0,98 la roti dintate cu dinti in "V''.
Reductor cu roti dintate conice cu dinti curbi cu o treapta:
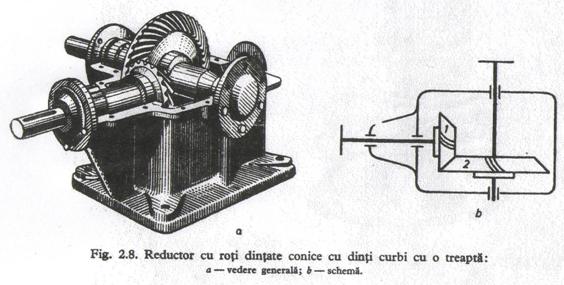
Se folosesc in cazul transmiterii puterii intre arbori cu axe concurente pentru rapoarte de transmitere i=1..6 si numai atunci cand constructia masinii impune utilizarea lor.Cum de obicei o roata dintata conica este in consola (fig.2.8.), conditiile de lucru ale dintilor sunt mult inrautatite.La reductoarele de putere mare, pentru inlaturarea acestui dezavantaj, se pot utiliza angrenajele pseudoconice sau hipoide la care ambele roti pot fi montate intre reazeme (fig.2.9.)
Reductor cu roti dintate pseudoconice cu o treapta :
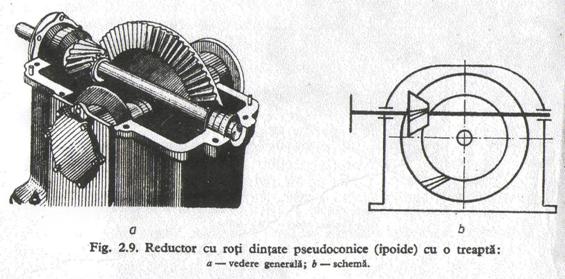
Randamentul acestor reductoare este 0,980,99.
Capitoul II. Alegerea electromotorului
Date de intrare :
![]()
![]() rot/min
rot/min
![]()
2.1. Randamentul transmisiei
![]()
![]() - randamentul transmisiei cu
curele trapezoidale
- randamentul transmisiei cu
curele trapezoidale
![]() - randamentul angrenajului cilindric cu dinti
drepti
- randamentul angrenajului cilindric cu dinti
drepti
![]() -
randamentul unui lagar cu rulment
-
randamentul unui lagar cu rulment
![]() = 0,95
= 0,95
![]() = 0,98
= 0,98
![]()
![]()
![]()
![]()
![]()
![]()
![]() =91,2
%
=91,2
%
2.2. Puterea necesara a motorului
![]() =
= ![]()
![]() =
= ![]()
![]()
![]() =6,6 KV
=6,6 KV
2.3. Adoptarea puterii standardizate
![]()
Adopt ![]() = 7,5 KW STAS
2474 - 68
= 7,5 KW STAS
2474 - 68
2.4.
Turatia necesara la intrarea in reductor (arborele II)![]()
![]()
![]()
![]()
![]() = 510 rot/min
= 510 rot/min
2.5. Turatia necesara la arborele motorului(arborele I)
![]()
- se recomanda ca ![]() sa fie: 1,5
sa fie: 1,5 ![]()
![]()
![]()
Adopt ![]()
![]() 510∙2=1020
rot/min
510∙2=1020
rot/min
![]()
![]() 1020 rot/min
1020 rot/min
2.6. Adoptarea turatiei standardizate
Adopt ![]() rot/min STAS 1893 - 72
rot/min STAS 1893 - 72
2.7. Tipul si caracteristicile motorului
TIP 132M
P 7,5 KW
n = 960 rot/min
d = diametrul arborelui de iesire
d =
Capitoul III. Determinarea rapoartelor de transmisie
![]() = raport de
transmisie total
= raport de
transmisie total
![]()
![]()
![]()
![]()
Recalculare: 
![]()
![]()
Capitoul IV. Calculul transmisiei cu curele trapezoidale
Elementele geometrice ale rotii de curea
4.1. Date initiale:
![]() = puterea utila a curelei
= puterea utila a curelei
![]() = puterea de
calcul
= puterea de
calcul
![]()
![]() =
7,5 KW
=
7,5 KW
![]() = 1435 rot/min
= 1435 rot/min
Regimul de lucru al transmisiei : variatii neansemnate.
Raportul de transmitere 
![]() ic
= 1,88
ic
= 1,88
4.2. Tipul curelei
Adopt curea trapezoidala ingusta
TIP SPZ ![]() =
63 - 180
=
63 - 180
4.3.
Diametrul primitiv al rotii mici, ![]()
Adopt ![]()
4.4.
Diametrul primitiv al rotii mari, ![]()
![]() =
= ![]()
![]()
![]()
![]() =
=
![]() Adopt DP2
=250 mm
Adopt DP2
=250 mm
4.5.
Diametrul primitiv mediu al rotilor de curea, ![]()
![]()
![]()
![]()
![]() 187,5 mm
187,5 mm
4.6. Distanta dintre axe, preliminara
![]()
![]() A
A ![]() (
(![]() )
)
![]() A
A ![]()
![]() A
A ![]()
Adopt A preliminar
4.7.
Unghiul dintre ramurile curelei, ![]()
![]()
![]() rad
rad![]()
4.8. Unghiul de infasurare la roata mica de curea, ![]()
![]()
![]()
![]() = 180˚-14,25
= 180˚-14,25
![]()
![]() = 165,75 = 165˚45
= 165,75 = 165˚45![]()
4.9. Unghiul de infasurare la roata mare de curea, ![]()
![]() = 180˚ +
= 180˚ + ![]()
![]() = 180˚ + 14,25
= 180˚ + 14,25
![]()
![]() =194,25=201
=194,25=201![]() 15
15![]()
4.10. Lungimea primitiva a curelei, Lp
 =1000+187,5π+
=1000+187,5π+![]() =1596,51
mm
=1596,51
mm
Adopt ![]() mm
mm
4.11. Distanta dintre axe definitiva
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() q=1953
q=1953
![]()
![]()
![]()
![]() 501,34 mm
501,34 mm
4.12. Viteza periferica a curelei
![]()
![]()
![]()
![]()
![]() 6,68 m/s
6,68 m/s
4.13. Coeficientul de functionare
![]()
4.14. Coeficientul de lungime
![]()
4.15. Coeficientul de infasurare
![]()
4.16. Puterea nominala transmisa de o curea
![]() Dp1 =
Dp1 =
i =
pentru i = P0 = 2,45 KW
i ![]() P0 = 2,49 KW
P0 = 2,49 KW
Di ![]() DP0 = 2,49-2,45 = 0,04 KW
DP0 = 2,49-2,45 = 0,04 KW
Di ![]() DP0 = x KW
DP0 = x KW
![]()
![]() = 0,02
= 0,02
![]() P0 = 2,45 + 0,02
P0 = 2,45 + 0,02
![]() P0 = 2,47 KW
P0 = 2,47 KW
Adopt ![]() KW
KW
4.17. Numarul de curele preliminar

![]() Z0
Z0
4.18. Coeficientul numarului de curele, cz
cz=0,90
4.19.Numarul de curele definitiv, z
z=![]() =4,44
=4,44
Adopt numarul de curele z=4.
4.20. Numarul de roti ale transmisiei
x =
4.21. Frecventa incovoierilor curelei
![]()
![]()
![]()
![]() f=8,34 Hz
f=8,34 Hz
4.22. Forta periferica transmisa
![]() [N]
[N]
![]()
![]()
![]() F=1123,6 [N]
F=1123,6 [N]
4.23. Forta de intindere a curelei
![]()
![]()
![]()
![]() Sa=1685,4
N
Sa=1685,4
N
Adopt Sa=1685 N
4.24. Cotele de modificare a distantei dintre axe
x![]() 0,03
Lp=0,03∙1600=48
0,03
Lp=0,03∙1600=48
y![]() 0,015
Lp=0,015∙1600=24
0,015
Lp=0,015∙1600=24
Adopt : x=48 mm
y=24 mm
4.25. Dimensiunile canalelor rotilor de curea
Sectiunea canalului: Z
lp=8,5
mm; nmin=2,5 mm; mmin=9 mm; f=8 mm; e=12 mm; ![]() =38o; r=0,5 mm; Dp1=125 mm; Dp2=235 mm; De1=125+5=130 mm;
=38o; r=0,5 mm; Dp1=125 mm; Dp2=235 mm; De1=125+5=130 mm;
De2=235+5=240 mm; B=(z-1)e+2f=(2-1)12+2∙8=28 mm.
Capitoul V. Proiectarea angrenajului reductorului
5.1. Predimensionarea
Date de proiectare
- Puterea nominala de
transmis la arborele pinionului : P1
[KW] ![]()
![]()
![]()
![]() KW
KW
-Turatia arborelui pinionului : n1 [rot/min]
![]() =
=![]()
![]()
![]() rot/min
rot/min
- Raportul de transmitere : iR = 4,25
- Durata de functionare a
angrenajului: ![]() ore
ore
- Conditii de functionare:
Ø sursa motoare: motor electric asincron trifazat cu rotorul in scurtcircuit;
Ø felul masinii de lucru: Transportor cu banda;
Ø caracterul sarcinii si marimea socurilor: vibratii.
- Siguranta in functionare impusa: normala (99%)
- Abaterea admisa a raportului de transmitere: 0,2
5.2. Determinarea elementelor de baza ale angrenajului
Acestea sunt:
Ø organul de referinta al danturii: cremaliera cu dinti drepti STAS 821 - 82;
Ø modulul danturii;
Ø numerele de dinti ai rotilor;
Ø suma coeficientilor de deplasare a danturii; repartizarea pe roti.
1. Viteza periferica a pinionului
 ms -1;
ms -1;
1 KW = 1,36 CP
1 CP = 0,736 KW
P1=7,12∙1,36=9,68 CP
![]()
![]()
![]()
2. Alegerea materialului, a tratamentului termic si a tehnologiei de fabricare a rotilor dintate
Adopt OLC45
Tehnologie: semifabricat ![]() degrosare
degrosare ![]() tratament termic de imbunatatire
tratament termic de imbunatatire ![]() strunjire de finisare
strunjire de finisare ![]() danturare finala
danturare finala
Tratament termic: imbunatatit
3. Alegerea treptei de precizie a angrenajului
Dat ![]()
![]()
Treapta de precizie: 7 - 8
Proces tehnologic final: freza de precizie medie: 8 - 9
Domeniul de aplicatie: reductor de uz general: 6 - 9
Adopt treapta de precizie: 8
4. Tensiunile admisibile ale materialelor rotilor la solicitarile de baza
a) La solicitarea la oboseala de contact a flancurilor
![]()
Se adopta: ![]()
![]() -
tensiunea limita;
-
tensiunea limita;
![]() - factorul durabilitatii la solicitarea de
contact;
- factorul durabilitatii la solicitarea de
contact;
![]() - factorul raportului duritatii flancurilor;
- factorul raportului duritatii flancurilor;
Pentru semifabricat laminat:
![]()
Adopt HB = 1750
![]()
![]() N/mm2
N/mm2
![]()
![]() N/mm2
N/mm2
![]()
![]() - numarul ciclurilor de solicitare
- numarul ciclurilor de solicitare
![]()
![]()
![]()
![]()
![]() rot /min
rot /min
![]()
![]()
![]()
![]()
![]()
![]()
![]() =
1
=
1
![]()
![]() =
1
=
1
![]()
![]()
![]()
![]()
Adopt ![]()
b) La oboseala de incovoiere a piciorului dintelui
![]()
![]() - tensiunea limita;
- tensiunea limita;
![]() - factorul durabilitatii la solicitarea de incovoiere;
- factorul durabilitatii la solicitarea de incovoiere;
![]() - factorul relativ de sensibilitate a
materialului la concentrarea de tensiune la baza dintelui, la durabilitate
nelimitata;
- factorul relativ de sensibilitate a
materialului la concentrarea de tensiune la baza dintelui, la durabilitate
nelimitata;
![]()
![]()
![]()
Adopt duritatea HB 1700
![]()

![]()

![]() =
=![]() =1
=1
![]()
![]()
![]()
![]()
5. Determinarea distantei dintre axe minim necesara
5.1. Adoptarea coeficientilor dimensionali
1. Coeficientul
diametral ![]() , al latimii danturii
, al latimii danturii
Adopt
![]()
2. Coeficientul axial ![]() , al latimii danturii
, al latimii danturii
Adopt
![]()
5.2. Adoptarea factorului
regimului de functionare, ![]()
Adopt KA=1,25
5.3. Determinarea momentului de torsiune la arborele pinionului
![]() ;
; ![]()
![]()

5.4. Determinarea factorului
de elasticitate al materialelor rotilor, ![]()
ZE=189,8 MPa
5.5. Determinarea distantei dintre axe

![]() - raportul de angrenare
- raportul de angrenare
![]()
![]()
![]()

![]()
![]() mm
mm
Adopt ![]() mm
mm
6. Verificarea alegerii corecte a materialului
6.1. Diametrele de divizare preliminare ale rotilor
![]() ;
; ![]()
![]()
![]()
![]() mm
mm
![]()
![]()
![]()
![]() mm
mm
6.2. Latimea preliminara a rotilor
![]()
![]()
![]()
![]()
![]() mm
mm
![]()
![]()
![]() mm
mm
7. Calculul modulului minim necesar

![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]()

![]()
![]()
8. Adoptarea preliminara a modulului standardizat
Adopt mSTAS=1
- pentru roti imbunatatite: ![]()
![]()
![]() se
verifica relatia de mai sus
se
verifica relatia de mai sus
9. Calcularea numarului de dinti ai rotilor
9.1. Numarul maxim de dinti
ai pinionului; adoptarea ![]()
![]()
![]()
![]()
Adopt ![]()
9.2. Recalcularea modulului

![]()
![]()
Adopt ![]() mm
mm
9.3. Numarul de dinti ai rotii conjugate
![]() - se rotunjeste la intreg
- se rotunjeste la intreg
![]()
![]()
Adopt Z2=64
10. Verificarea raportului de transmitere

![]()
Abaterea:
Trebuie sa fie indeplinita conditia: ![]()
![]()
![]() este indeplinita conditia
este indeplinita conditia
11. Distanta dintre axe de referinta ![]()
![]()
![]()
![]()
![]() mm
mm
Se recomanda sa fie indeplinita conditia:
![]()
![]()
12. Adoptarea sumei coeficientilor de deplasare a danturii ![]()
![]()
![]()
Adopt ![]()
- Repartizare ![]() pe cele doua roti:
pe cele doua roti:
![]()
![]()
![]()
![]()
![]()
![]()
5.3. Calculul geometric al angrenajului
Date initiale:
Numerele de dinti: ![]() ;
; ![]()
Modulul standardizat ![]() mm
mm
Profilul de referinta standardizat (STAS 821-82)
![]() ;
; ![]() ;
; ![]() ;
; ![]()
![]()
Suma coeficientilor de deplasare a danturii ![]()
Repartizarea coeficientilor de deplasare pe roti: ![]() ;
; ![]()
3.1. Elementele geometrice ale rotilor dintate
3.1.1. Diametrele de divizare
![]() mm
mm
![]() mm
mm
3.1.2. Diametrele de baza
![]() mm
mm
![]() mm
mm
3.1.3. Inaltimea capului dintelui
![]() mm
mm
![]() mm
mm
3.1.4. Diametrele de cap
![]() mm
mm
![]() mm
mm
3.1.5. Inaltimea piciorului dintelui
![]() mm
mm
![]() mm
mm
3.1.6. Diametrele de picior
![]() mm
mm
![]() mm
mm
3.1.7. Pasul de divizare
![]() mm
mm
3.1.8. Pasul de baza
![]() mm
mm
3.1.9. Arcul dintelui pe cercul de divizare
![]()
![]()
3.1.10. Unghiul de presiune al evolventei pe cercul de cap


3.2. Elementele geometrice ale angrenajului
3.2.1. Distanta dintre axe, de referinta
![]()
![]()
![]()
![]()
![]() mm
mm
3.2.2. Unghiul de angrenare
 ;
; ![]()
![]()
![]()
3.2.3. Diametrele de rostogolire
![]()
![]()
![]()
![]() mm
mm
![]()
![]()
![]()
![]() mm
mm
3.2.4. Distanta dintre axe
![]()
![]()
![]()
![]()
![]() mm
mm
3.2.5. Modificarea distantei dintre axe
Coeficientul modificarii distantei dintre axe
![]()
![]()
![]()
3.2.6. Scurtarea dintilor
Coeficientul scurtarii capului dintilor pentru relizarea
jocului standardizat ![]()
![]()
![]()
![]()
![]()
3.3. Verificarea calitatilor geometrice ale danturilor
3.3.1. Verificarea lipsei ascutirii dintilor pe cercul de cap
3.3.1.1. Arcul dintelui pe cercul de cap

![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
3.3.1.2. Verificarea
![]() - pentru roti de imbunatatire
- pentru roti de imbunatatire
Se compara: ![]()
![]()
![]()
![]()
![]() se verifica relatiile de mai sus
se verifica relatiile de mai sus
3.3.2. Verificarea lipsei subtaierii
a. Numarul minim de dinti ai rotilor
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
b. Se verifica indeplinirea conditiilor:
![]()
![]()
Adica:
![]()
![]()
![]() se verifica
se verifica
3.4. Verificarea calitatilor geometrice ale angrenajului
3.4.1. Verificarea continuitatii angrenarii
Se calculeaza gradul de acoperire ![]()

![]()
![]()
Se verifica indeplinirea conditiei:
![]()
![]()
![]() conditia este indeplinita
conditia este indeplinita
3.4.2. Verificarea lipsei interferentei profilurilor in functionare
a. Razele inceputului profilului evolventic al dintilor
![]()
![]()
![]()
![]()
![]() mm
mm
![]()
![]()
![]()
![]()
![]() mm
mm
b.
Raza intrarii in angrenare
![]()
![]()
![]()
![]() mm
mm
c. Raza iesirii din angrenare
![]()
![]()
![]()
![]() mm
mm
d. Verificare
![]()
![]()
![]() 1,18>0,69
1,18>0,69
![]()
![]()
![]() 18,95>16,37
18,95>16,37
Sunt verificate conditile.
3.5. Calculul dimensiunilor nominale de control al danturilor
3.5.1. Numarul de dinti in
intervalul de masurare a cotei ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
3.5.2. Cota (lungimea) peste N dinti
![]()
![]()
![]()
![]()
![]()
![]()
![]()
3.6. Adoptarea formei constructive a rotilor angrenajului (preliminar)
3.6.1. Pinionul
![]() mm ;
mm ; ![]() mm ;
mm ;
![]() N∙mm
N∙mm
Adpot ![]()
![]()
![]()
 mm
mm
![]() Adopt
Adopt ![]() mm
mm
![]()
![]() pinionul se construieste in forma roata
separata de arbore
pinionul se construieste in forma roata
separata de arbore
![]()
![]() pinionul
se construieste roata disc plin
pinionul
se construieste roata disc plin
3.6.2. Roata condusa
![]() mm
mm
![]() mm
mm ![]() roata condusa se construieste disc plin
roata condusa se construieste disc plin
3.6.3. Schitele solutiilor constructive ale rotilor
Roata disc plin pentru pinion si pentru roata condusa
3.6.4. Latimea comuna de contact a danturii
![]() mm
mm
![]() mm
mm
![]() Adopt
Adopt ![]() mm
mm
![]()
![]() mm
mm
3.6.5. Latimea pinionului
![]()
![]() mm
mm
![]() Adopt
Adopt ![]() mm
mm
Capitoul VI. Proiectarea arborelui de intrare al reductorului
Arborele de intrare al unui reductor antrenat cu curele
1.Date deproiectare
1.1.Puterea pe arbore P[KW]
P=PII=PME∙ηc=7,5
∙ 0,95=7,125 KW![]()
1.2.Turatia n [N∙mm]
nII=![]() =
=![]() =511
rot/min
=511
rot/min
1.3.Mt pe arbori
Mt = MtII =
9,55∙106 ![]() [N∙mm]
[N∙mm]
Mt = 9,55 ∙ 106
![]() = 133,16∙103 N∙mm
= 133,16∙103 N∙mm
1.4. Organe de masini dispuse pe arbore si modul de solidarizare cu acestea
Roata condusa, asanblata prin pana paralela;
Rulment, asamblat prin presare;
Pinionul, asamblat prin pana paralela.
1.5. Conditii de functionare - normale
2. Predimensionarea arborelui
Urmareste determinarea diametrului arborelui considerat initial constant.
Determinarea din conditiile de rezistenta la torsiune:
![]()
![]()
![]()
 mm
mm
Adopt dSTAS=17 mm
2.1. Determinarea distantei dintre reazemele arborelui
 Se cunosc:
Se cunosc:
B=28 mm
b1=41 mm
Se determina:
Br=(0,4..0,8)d
=10,2 mm
l2=15..25 - distanta dintre pinion si rulment
Adopt l2=20 mm
l3=30.40 - distanta dintre rulment si roata condusa, cu curea
Adopt l3=35
Se calculeaza:
l=b1+2l2+Br
l=41+2∙20+10,2=91,2 mm
l4=0,5Br+l3+0,5B
l4=0,5∙10,2+35+0,5∙28=54,1 mm
2.2. Calculul la incovoiere
2.2.1. Forta care actioneza pe arbore
a) Forta din transmisiile cu curele, Sa
Sa=![]()
e=2,718; μ=0,35;
β2=3,51 rad
γ=0,37 rad
DP2=315 mm
FtII=![]() N
N
S1=![]() =
=![]() N
N
![]() N
N
![]() N
N
![]() rad
rad
b) Forta din angrenaj
FtII=![]() N
N
![]()
![]()
FrII=FtII∙tgαw=11,39∙103∙0,38=4326,7 N
2.2.2. Diagrama de forte si momente
2.2.3. Repartizarea fortelor in doua plane perpendiculare
Planul orizontal, H: Sacosθ=2047,02∙0,99=2026,55 N;
FtII=11,39∙103 N
Planul vertical, V: Sasinθ=2047,02∙0,11=225,17 N;
FrII=4,33∙103 N
2.2.4. Determinarea relatiei de rezistenta
a) In planul H: Sacosθ-RBH+FtII-RDH=0
![]()
![]() Sacosθ∙(l+l4)-RBH∙l+FtII∙0,5∙l=0
Sacosθ∙(l+l4)-RBH∙l+FtII∙0,5∙l=0
RBH=![]() N
N
RDH=-RBH+FtII+ Sacosθ=-8,92∙103+11,39∙103+2047,02∙0,99=4,5∙103 N
b) In planul V: Sasinθ-RBV+FrII-RDV=0
![]()
![]() RBV= Sasinθ(l+l4)-RBV∙l+FrII∙0,5∙l=0
RBV= Sasinθ(l+l4)-RBV∙l+FrII∙0,5∙l=0
RBV=![]() N
N
RDV= Sasinθ-RBV+FrII=2047,02∙0,11-6050+4330=-1,494∙103 N
2.2.5. Calculul momentelor incovoietoare
a) In planul H:
MAB=Sa∙x∙cosθ:
MBC=Sa(l4+x)cosθ-RBH∙x:
MDC=RDH∙x:
b) In planul V:
MAB=Sa∙xsinθ:

MBC=Sa∙(l4+x)sinθ
- RBV∙x=0
MDC=RDV∙x=0
d)Momentul incovoietor rezultant
Mij=![]() ; j=A,B,C,D
; j=A,B,C,D
MiA=![]()
MiC=![]()
MiC2=![]()
MiD=![]()
2.2.6.Solicitarea la torsiune
Mt=MtII=133,16∙103 N∙mm
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 5002
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved