| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
In scopul indeplinirii sarcinilor pentru care este conceput, un robot poseda o structura mecanica, care asigura legatura fizica intre baza robotului si efectorul final sau organul terminal. Pentru a se asigura conceperea si comandarea functionarii unui robot este necesara modelarea sa matematica conceputa, in general, pentru cazul in care structura acestuia poseda doar corpuri perfect rigide legate prin cuple ideale simple, fie de rotatie, fie de translatie. Fiecarei cuple i se asociaza o singura variabila articulara q care este:
un unghi de rotatie in jurul axei cuplei , cand cupla respectiva este de rotatie;
o deplasare d de-a lungul axei cuplei, cand aceasta este de translatie.
Legatura intre spatiul operational, cuprinzand variabilele care exprima pozitia si orientarea efectorului final si spatiul articular, care cuprinde variabilele cuplelor, este realizata prin intermediul modelului geometric al robotului. Cand aceasta legatura este realizata in sensul indicat, se obtine modelul geometric direct al carui rezultat sunt cele 12 ecuatii cinematice ale robotului. Exprimarea variabilelor articulare ale robotului in functie de cele operationale, este rezultatul abordarii modelului geometric invers.
Conceput ca o succesiune de corpuri legate intre ele prin cuple care le permit miscari relative, orice robot poate fi privit ca o succesiune de repere atasate corpurilor respective. Fiecare dintre aceste repere este perfect exprimat printr-o matrice de tip general , fie fata de reperul precedent din succesiunea de corpuri, fie fata de reperul fix, atasat de regula bazei robotului.
Fie un robot cu n grade de libertate, realizat din n elemente rigide succesive legate prin n cuple simple. Problema principala a modelarii geometrice directe este exprimarea matricei generale n , care precizeaza efectorul final fata de reperul fix, prin intermediul unei succesiuni de matrice care pozitioneaza fiecare element al robotului fata de precedentul. Astfel, intre reperele atasate elementelor i-1 si i, legatura este asigurata printr-o matrice de transfer notata i-1ti, care are intotdeauna forma unei matrice generale, indiferent care este natura cuplei care leaga intre ele doua elemente.
Pozitia elementului i fata de baza robotului, considerat elementul 0 al acestuia, se va exprima deci, prin produsul matricelor de transfer corespunzator tuturor sistemelor de referinta atasate, de la baza pana la i:
![]() (1)
(1)
Efectorul final va fi exprimat fata de baza prin matricea:
![]() (2)
(2)
Pe parcursul determinarii matricei n, se calculeaza produsele matricelor de transfer de la dreapta spre stanga, astfel ca pozitia efectorului va fi cunoscuta, pe rand fata de toate elementele de la stanga sa pana la baza.
Se vor preciza astfel,
![]()
![]()
![]()
Exprimarea matricelor de transfer se poate realiza in mai multe moduri functie de conventiile adoptate pentru modelarea elementelor si a sistemelor de referinta atasate acestora. Cea mai raspandita este conventia Denavit-Hartenberg care porneste de la urmatoarele consideratii:
Numaratoarea elementelor incepe la baza spre efectorul final (de la stanga la dreapta). Astfel, baza este elementul 0 si nu este considerata ca facand parte dintre elementele robotului.
![]() Fiecare element are
acelasi numar ca si cupla plasata la stanga sa, care ii
imprima si miscarea. Astfel, elementul i are la stanga cupla i
si la dreapta cupla i+1.
Fiecare element are
acelasi numar ca si cupla plasata la stanga sa, care ii
imprima si miscarea. Astfel, elementul i are la stanga cupla i
si la dreapta cupla i+1.
![]() Ultima cupla a
robotului este n, situata
la stanga efectorului final. La dreapta acestuia nu mai exista cupla.
Ultima cupla a
robotului este n, situata
la stanga efectorului final. La dreapta acestuia nu mai exista cupla.
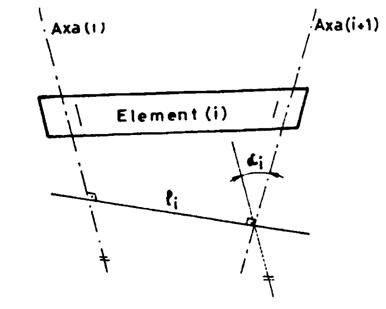
Fiecare element i al robotului, care are rolul strict de a asigura legatura dintre cuplele de la capetele sale, este caracterizat prin doua marimi geometrice (Figura 1):
lungimea li, reprezentata de distanta intre axele cuplelor respective si masurata pe perpendiculara comuna pe axele cuplelor i si i+1;
unghiul de rasucire i, reprezentat de unghiul dintre axele cuplelor de la capete;
Pe axa cuplei oarecare i, se afla picioarele a doua perpendiculare:
perpendiculara comuna axelor i-1 si i
perpendiculara comuna axelor i si i+1
Pozitia relativa a corpurilor i-1 si i este precizata prin:
distanta di masurata pe axa cuplei intre picioarele perpendicularelor comune axelor i+1, i si respectiv i, i+1
unghiul i dintre cele doua perpendiculare, masurat in plan perpendicular pe axa cuplei i
Sistemul de referinta atasat elementului i, trebuind sa reflecte pozitia acestuia la orie moment, se plaseaza pe axa cuplei i+1. Modul de plasare difera in functie de natura cuplei i, adica caracterul miscarii imprimate de aceasta elementului considerat;
Sistemul de referinta S0, atasat bazei robotului, se plaseaza pe axa cuplei 1 si reprezinta reperul fix. Daca din anumite motive este necesara considerarea unui alt sistem de referinta fix, atunci S0 se exprima fata de acesta printr-o matrice generala cu elemente constante.
De regula, sistemul de referinta Sn , atasat efectorului final, este plasat pe axa cuplei n impreuna cu sistemul atasat elementului n-1;
Daca de efectorul final este fixata o scula prelucratoare, pozitia sa se reprezinta fata de reperul atasat efectorului final printr-o matrice generala cu elemente constante.
In cazul elementului i legat prin cupla de rotatie i, variabila articulara aferenta este unghiul i , distanta di fiind constanta (figura 2)
Sistemul de referinta Si atasat elementului se alege astfel:
Originea Oi a reperului este punctul de intersectie dintre axa cuplei i+1 si perpendiculara comuna pe axele cuplelor i si i+1. In cazul in care aceste axe sunt concurente, originea Oi se poate alege in punctul de concurenta. Cand axele sunt paralele sau coliniare, originea reperului se alge astfel ca di = 0.
Directiile axelor sunt:
Axa Oizi se suprapune peste axa cuplei i+1, avand sensul pozitiv dat de rotatia trigonometrica in jurul acestei axe.
Axa Oixi are directia perpendicularei pe axele cuplelor i si i+1 (care sunt axe Oi-1zi-1, respectiv Oizi). Sensul sau pozitiv este sensul produsului vectorial al versorilor celor doua axe. Aceeasi observatie este valabila daca axele Oi-1zi-1 si Oizi sunt concurente. Daca axele cuplelor i si i+1 sunt paralele sau colineare, axa Oixi se alege perpendiculara pe planul determinat de cele doua directii paralele, respectiv pe directia lor comuna, cu sensul astfel precizat ca trecerea de la un reper la altul sa se faca cat mai simplu.
Axa Oiyi are directia si sensul necesare pentru ca triedul Si sa fie drept.
Tinand seama de aceste precizari conventionale, rezulta ca, sistemul de referinta atasat elementului i se obtine din sistemul atasat elementului i-1, de care este legat prin cupla de rotatie i, prin urmatoarea succesiune de transformari:
o rotatie de unghi i in jurul axei Oi-1zi-1;
o translatie de marime di de-a lungul axei Oi-1zi-1;
o translatie de marime li de-a lungul axei Oixi;
o rotatie de unghi i in jurul axei Oixi.
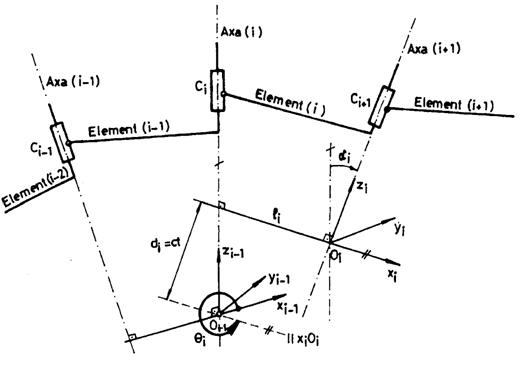
Fig. 2.
Matricea de transfer, care precizeaza reperul Si , se obtine prin produsul matricelor care reprezinta transformarile omogene mentionate:
 (4)
(4)
de unde:
 (5)
(5)
In cazul elementului i legat prin cupla de translatie i, variabila articulara aferenta este deplasarea di, unghiul i fiind constant (figura 3)
Conform proprietatilor miscarii de translatie, la fiecare moment, toate punctele corpului au aceeasi lege de miscare, aceeasi viteza si aceeasi acceleratie. Este evident ca, lungimea elementului i nu are nici o importanta pentru miscare, motiv pentru care se considera li = 0.
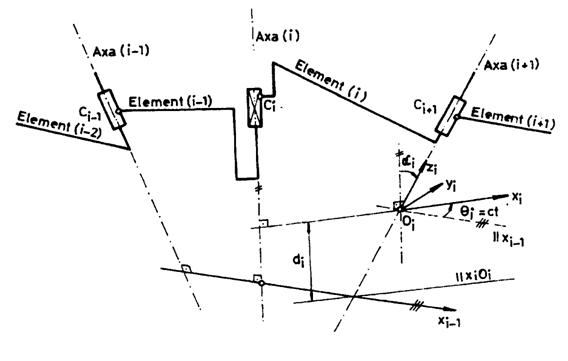
Sistemul de referinta Si atasat elementului se alege astfel:
Originea Oi a reperului se alege, fie suprapusa peste originea reperului Si-1 pentru pozitia di = 0 a elementului, fie la intersectia axei cuplei i+1 cu prelungirea perpendicularei comune pe axa cuplelor i-1 si i.
Directiile axelor sunt:
Axa Oizi se suprapune peste axa cuplei i+1;
Axa Oixi are directia perpendicularei comune pe axele cuplelor i si i+1; relativ la sensurile celor doua axe, sunt valabile consideratiile prezentate in cadrul elementului legat prin cupla de rotatie;
Axa Oiyi are directia si sensul necesare pentru ca triedrul Si sa fie drept.
Matricea de transfer care precizeaza reperul Si se contine in acelasi mod ca si pentru elementul legat prin cupla de rotatie, considerand insa, lungimea elementului nula:
 (6)
(6)
Dupa ce se exprima toate matricele de transfer aferente elementelor robotului, se calculeaza matricea n, ale carei elemente identificate cu cele din forma sa generala, reprezinta ecuatiile cinematice ale robotului. Acestea se prezinta deci, sub forma unui sistem de 12 ecuatii care exprima coordonatele operationale ca functii de coordonatele articulare si materializeaza modelul geometric direct:
 (7)
(7)
 (8)
(8)
 (9)
(9)
 (10)
(10)
APLICATIE
Sa se studieze modelul geometric direct al robotului RT prezentat in figura 4.
REZOLVARE
Conform teoriei generale, pe axa fixa a cuplei 1 se plaseaza originea sistemului fix x0O0y0z0 avand axa O0z0 de-a lungul axei cuplei respective. Fiind primul reper, in planul perpendicular pe axa cuplei, se aleg arbitrar axele O0x0 si O0y0.
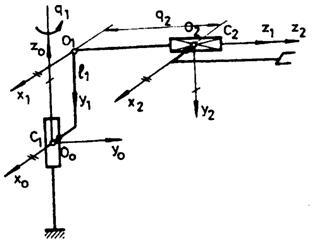
Originea sistemului de referinta atasat elementului 1 al robotului se plaseaza pe axa cuplei 2 de translatie astfel incat pozitia sa este caracterizata de valoarea variabilei articulate q2 = 0. Axa O1z1 este aliniata la axa cuplei 2, iar axa O1x1 este perpendiculara pe planul format de axele O0z0 si O1z1.
Sistemul de referinta atasat elementului 2, efectorul final al robotului, se plaseaza in centrul cuplei de translatie, avand axele O2z2 si O2x2 paralele cu cele ale reperului anterior.
Nr.crt |
Var.art. |
l1 |
i |
di |
i |
cos i |
sin i |
|
q1=1 |
li | ||||||
|
q1=d2 |
|
Notand pentru simplificarea scrierii, cos i = c l si sin 1 = s l, matricele de transfer sunt, conform expresiilor generale (5) si (6)
cu care, matricea generala care exprima pozitia si orientarea efectorului final, in raport cu sistemul de referinta fix, este:
Ecuatiile cinematice ale robotului RT, sunt:



Problema inversa a robotilor consta in determinarea variabililor articulare, in functie de pozitia si orientarea efectorului final, ceea e revine la a rezolva ecuatiile cinematice. Solutiile ecuatiilor cinematice prezentate sub forma explicita reprezinta modelul geometric invers al robotului:
 (11)
(11)
Principiul de rezolvarea a ecuatiilor cinematice consta in a identifica printre ecuatiile cinematice pe acelea din care se pot determina direct anumite variabile articulate.
Expresiile prea complicate nu mai
pot fi utilizate ca atare pentru ca ar fi mult prea dificila
rezolvarea unor astfel de ecuatii trigonometrice. In acest caz se
procedeaza la inmultirea la stanga pe rand a matricei n,
in forma sa generala cu inversele matricelor de transfer, incepand cu ![]() .
.
Ecuatiile obtinute sunt:
 (12)
(12)
In aceste ecuatii se identifica elementele cele mai favorabile din punct de vedere al simplitatii expresiile lor, iar dintre egalitatile astfel create, se determina variabilele articulate qi. Numai experienta in rezolvarea unor astfel de probleme poate conduce la alegerea celei mai simple variante.
Rezolvarea problemei geometrice inverse poate conduce la diferite situatii:
absenta solutiei impusa a efectorului final se afla in afara spatiului de lucru;
o infinitatea de solutii, in cazul in care fie ca robotul este redundant in raport cu sarcina pe care este pus s-o efectueze, fie ca el se afla intr-o configuratie singulara cand nu poate executa anumite miscari;
un numar finit de solutii, daca toate variabilele articulate se pot calcula fara ambiguitate.
Metoda clasica de analiza cinematica si cinetostatica a mecanismelor utilizate in constructia manipulatoarelor si robotilor industriali, prin descompunerea in grupe assurice, se bucura de succes, deoarece permite o abordare modulara. Calculul se face grafic sau analitic, realizandu-se programe de calcul pentru fiecare grupa structurala.
Abordarea modulara reduce numarul de ecuatii de rezolvare, insa are o serie de deficiente legate de faptul ca numarul grupelor structurale este nelimitat, fiecare grupa poate avea aspecte diferite, limitand generalitatea metodei. In acest sens, pentru fiecare mecanism este necesar un studiu pentru determinarea relatiei structurale, actualizarea parametrilor formali ai fiecarei subrutine, realizarea programului apelant al subrutinelor (analiza cinematica se face in sensul relatiei structurale din calculul reactiunilor).
In analiza cinematica prin elaborarea metodei ciclurilor independente s-a deschis drumul utilizarii proprietatilor grafurilor in acest domeniu, usurand astfel procesul de analiza a structurilor complexe.
Metoda permite determinarea distributiei de viteze si de acceleratii pe cale analitica.
Metoda are la baza doua tipuri de formule:
formula Euler care leaga vitezele si acceleratiile a doua puncte de pe acelasi element:
![]() (13)
(13)
![]() (14)
(14)
unde, ![]() reprezinta
viteza, respectiv acceleratia absoluta fata de un sistem
fix a puntului B de pe corpul i.
reprezinta
viteza, respectiv acceleratia absoluta fata de un sistem
fix a puntului B de pe corpul i.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2237
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved