| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Modelul cinematic al mecanismului cuprinde sistemul de ecuatii si inecuatii ce descriu structura si proprietatile cinematice ale mecanismului dat, restrictiile impuse asupra structurii si/sau legile de miscare ale elementelor sale.
Sistemul de ecuatii si inecuatii de descriu modelul cinematic al mecanismului este definit de o multime parametri care pot fi grupati in trei submultimi:
submultimea parametrilor structurali, formata din:
numarul elementelor cinematice, ![]() ;
;
numarul cuplelor cinematice, ![]() ;
;
numarul parametrilor cinematici exteriori, ![]() ;
;
numarul total de parametri cinematici, ![]() ;
;
gradul de mobilitate: ![]() .
.
submultimea parametrilor geometrici, cuprinde marimi
geometrice constante ale elementelor (in cazul mecanismelor cu bare acestea pot
fi lungimile ![]() ale elementelor si
unghiurile constante
ale elementelor si
unghiurile constante ![]() dintre elemente);
dintre elemente);
submultimea parametrilor cinematici, alcatuita din:
deplasari, ![]() ;
;
viteze, ![]() ;
;
acceleratii, ![]() .
.
La randul lor, parametrii cinematici - denumiti si variabile - se pot clasifica pe baza mai multor criterii, cele mai importante fiind:
rolul variabilelor in reprezentarea miscarii sistemului:
variabile independente: ![]() ;
;
variabile dependente: ![]() ;
;
natura legaturilor:
parametri exteriori: ![]() ;
;
parametri interiori: ![]() ;
;
Realizarea functiilor mecanismului se face prin transformarea miscarilor elementelor de intrare. Caracterizarea acestui proces de transformare a miscarilor se face cu ajutorul a trei categorii de functii de miscare:
functii de deplasari: ![]() ;
;
functii de viteze: ![]() ;
;
functii de acceleratii: ![]() ;
;
Functiile de viteze si acceleratii se obtin din functia de deplasari ![]() prin derivari succesive.
prin derivari succesive.
Aplicatie Se da mecanismul patrulater articulat plan de tip manivela-culisa din fig. 12. Sa se stabileasca submultimile parametrilor structurali, geometrici si cinematici si functiile de miscare ale mecanismului.
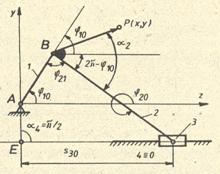 Se cunosc:
Se cunosc:
![]()
Mecanismul este
utilizat pentru ghidarea punctului ![]() al bielei.
al bielei.
Cele trei submultimi de parametri ai sistemului de ecuatii si inecuatii al modelului cinematic sunt:
submultimea parametrilor structurali, formata din:
numarul elementelor cinematice, ![]() ;
;
numarul cuplelor cinematice, ![]() ;
;
numarul parametrilor cinematici exteriori, ![]() ;
;
numarul total de parametri cinematici, ![]() ;
;
gradul de mobilitate: ![]() .
.
submultimea parametrilor geometrici: datele din enunt;
submultimea parametrilor cinematici, alcatuita din:
variabile independente:  ;
;
variabile dependente: ![]() ,
, 
parametri exteriori: ![]() ,
, 
parametri interiori: ![]() ,
, ![]()
Functiile de miscare exprima legatura intre parametrii dependenti si cei independenti. Aceste functii se pot exprima intr-o forma explicita sau implicita:
Functiile de viteza si acceleratie se obtin prin derivarea succesiva a relatiilor de mai sus.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2763
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved