| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
PROIECTAREA ELEMENTELOR COMPONENTE A UNUI ROBOT INDUSTRIAL
Structura cinematica a robotului pe care il vom analiza in continuare este prezentata in figura 5.1.
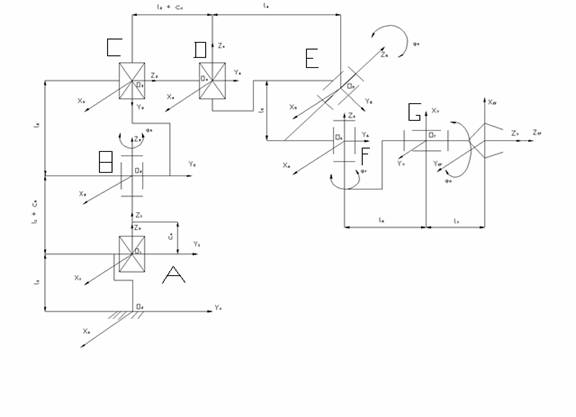
Figura 5.1 Structura cinematica a robotului
In structura robotului s-a introdus un modul de micromiscare. Acesta poate fi amplasat si inaintea Mecanismului de Orientare fara a modifica structura Dispozitivului de Ghidare, el realizand o translatie scurta. De regula modulul de micromiscare este amplasat in structura Efectorului Final (E.F.). La scrierea matricilor de trecere are aceeasi influenta.
Mecanismul robotului este de tip RRR cu axe neconcurente, de tip PUMA 560. Tipul structurii lantului cinematic al robotului industrial prezentat in figura 1.4 este TRT-RRR+E.F.
Din aceasta structura rezulta dimensiunile minime de la care se pornesc miscarile. Pentru dimensiunile maxime, individual se vor aduga cursele realizate.
In figura se prezinta planul de amplasament al robotului intr-o celula de fabricatie.
Figura 5.2 planul de amplasament
Pe baza planului de amplasament se stabileste ciclul de lucru al robotului, respective ordinea de functionare a cuplelor cinematice, ceea ce ne da programul tipic de lucru. Din acest program rezulta pozitiile cele mai defavorabile. In aceste pozitii defavorabile se determina forta generalizata la nivelul fiecarei cuple cinematice pe baza careia se determina puterea motoarelor de actionare in conditiile cele mai defavorabile.
Ciclul de lucru se determina pornind de la starea initiala a tuturor cuplelor cinematice considerandu-se in pozitiile cele mai apropiate de axa robotului. Obiectele pot fi aduse in vederea manipularii fie pe palete fie individual, orientate cu axa orizontala sau verticala; la felsi evacuarea se poate realize in aceste sisteme.
Indiferent de sistemul de transport
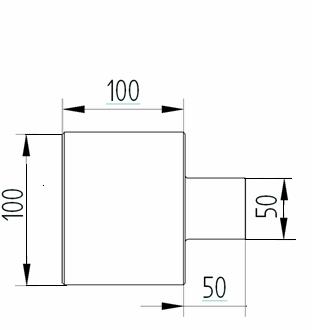
robotul prinde obiectul de diametrul minim. Asfel forma obiectului este prezentata in figura 5.3
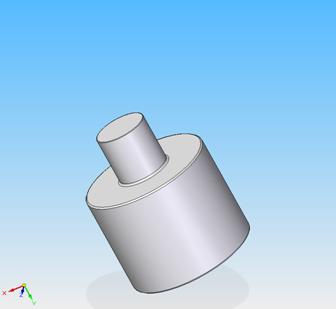
Figura 5.3 Piesa de manipulat
Pe baza planului de amplasament si lantul cinematic respective dimensiunile robotului se determina spatial de lucru figura 5.4.
Spatiul de lucru este utilizat pentru amplasarea periferiei robotului, adica dispozitivele aducatoare de obiecte, de scule sau dispozitive; astfel incat aceste obiecte trebuie sa ajunga in interiorul spatiului de lucru al robotului pentru a le putea apuca.
Masinile de lucru si instalatiile de evacuare.
In functie de tipul situarii alese la aducerea respective evacuarea obiectelor se stabileste ciclu de lucru pe secvente; notandu-se secventele de la 0 (pozitia initiala a Efectorului Final in ordinea efectuarii) pana la revenire in pozitia initiala.
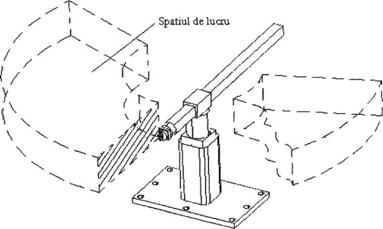
Figura 5.4 Spatiul de lucru
Pentru realizarea ciclului de functionare sunt actionate anumite cuple cinematice, respective efectorul final. Aceste miscari se realizeaza cu anumite viteze, acceleratii. Pe baza ciclului de functionare se intocmeste un tabel centralizator care cuprinde:
|
Nr. Crt. |
Secventa de lucru |
Explicata cupla-functionala |
Cursa [mm] |
Viteza mm/s] |
Timp[s] |
Acceleratia [m/s2] respectiv [rad/s2] |
|
Apropiere cupla C |
0.29 |
3.27 |
||||
|
Coborare cupla A |
0.29 |
3.27 |
||||
|
prindere SF-Ef | ||||||
|
ridicare cupla A |
0.29 |
3.27 |
||||
|
retragere cupla C |
0.29 |
3.27 |
||||
|
rotire cupla B |
1.79 |
53.37 |
||||
|
Apropiere cupla C |
0.29 |
3.27 |
||||
|
Rotire cupla G |
1.79 |
53.37 |
||||
|
Coborare cupla A |
0.29 |
3.27 |
||||
|
desprindere SF-ef | ||||||
|
retragere cupla c |
0.29 |
3.27 |
||||
|
|
apropiere cupla C |
0.29 |
3.27 |
|||
|
prindere SF-Ef | ||||||
|
retragere cupla c |
0.29 |
3.27 |
||||
|
rotire cupla B |
1.79 |
53.37 |
||||
|
Rotire cupla G |
1.79 |
53.37 |
||||
|
Coborare cupla A |
0.29 |
3.27 |
||||
|
Desprindere EF | ||||||
|
Retragere cupla C |
0.29 |
3.27 |
||||
|
Rotire cupla B |
1.79 |
53.37 |
||||
|
Ridicare cupla A |
0.29 |
3.27 |
Calculul de dimensionare a obiectului manipulat si a EF
greutatea obiectului de manipulat:
m0=17 [Kg]
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Daca v=ct→![]()
![]() 0
s
0
s
v = 950 [mm/s]
![]()
S=k(2Ff+Fi)
2Ff=Fi+G
Fi=mOB *a
Fi=17*3223 =54801,37 N
G= mOB *g
G=17-10=7
![]()
![]()
Ff=η*N
η=0
![]()
![]()
![]()
α=90
S=2*274041 *cos(α/2)=387553,7
![]()
![]()
![]()
Se considera o amplificare de 1 adica 150%=b
S*a=Fb*b
S=Fb*(b/a)
b/a=1,5
Fb b/a)/S
Fb=1 /387553,7=0,387*10-5
b=1 *a
b=1 *110=165mm
tg(α-Δα)=Fu/Fb→Fu=Fb* tg(α-Δα)
Fb=(S*a)/b
Fu=0 *(110/165)* tg(45-15)*10-5
Fu=0 *10-5
![]()
![]()
K=1
k'=1,5
x=10mm
p=6 *105
pa=(3+n/5)*105
pa=(3+16/5)*105=6,2*105
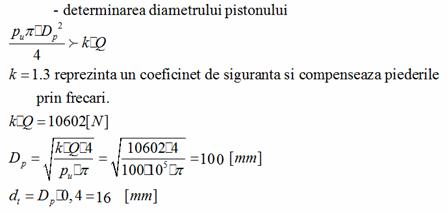
![]()
D=70 mm
![]()
![]()
![]()
![]()
![]()
![]()
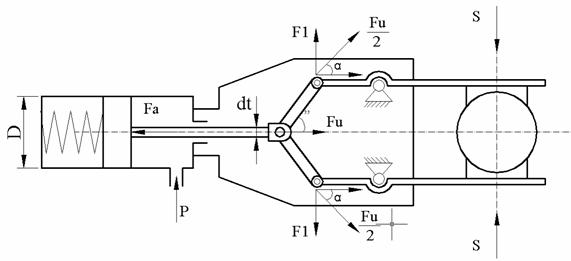
Dispozitivul de prehensiune:
Se adopta
![]()
Forta S1 se proiecteaza pe directia de actionare → Q
S1=S*(a/b 387553,7*(110/165)=258368,6N
β=45 ̊
tg45 ̊= Q/S1→Q=tg45 ̊ *S1=1*258368 N
Se neglijeaza fortele de frecare respectiv momentele de frecare din articulatii. Forta de strangere Q se realizeaza folosind forta hidraulica, destrangerea fiind mecanica realizata de catre arcul elicoidal.
Calculul de dimensionare al robotului
Se considera masa efectorului final
calculul centrelor de masa
Calculul la nivelul fiecarei cuple
Cupla C
Cupla B
Cupla A
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2433
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved