| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
STRUCTURA ROBOTILOR INDUSTRIALI
Conceptul de automatizare flexibila a aparut ca urmare a reuniunii ''inteligentei'' calculatorului electronic cu manipulatoarele mecanice, in scopul automatizarii unor operatii sau grupe de operatii, dintre care mentionam : sudarea diverselor repere, alimentarea masinilor-unelte, vopsire, operatii de asamblare si montaj, etc.
Robotii industriali se pot defini ca fiind masini automate, usor programabile, care pot executa lucrari simple, repetabile si au un numar minim necesar de legaturi cu mediul in care lucreaza.
In aceasta perioada a automatizarii flexibile, robotii industriali sunt un factor semnificativ in sistemele viitoare ale productiei automatizate si in activitatea economica. In Japonia, in ultimii zece ani, utilizarea robotilor industriali a produs o serie de avantaje economice si sociale. Dintre acestea, mentionam majoritatea productivitati, ameliorarea considerabila a conditiilor de munca ale muncitarilor, prevenirea accidentelor de munca, imbunatatirea calitatii produselor si recuperarea mai rapida a investitiilor.
Din punct de vedere al proceselor de productie se poate afirma ca robotii industriali au fost folositi pana in prezent in special pentru lucrari de presare, procese tehnologice de prelucrare, sudare, vopsire si asamblare.
Presarea se realizeaza in mod obijnuit in cateva secunde, dar este insotita de pericole. Robotii industriali sunt folositi pentru fazele de asezare sau de evacuare a pieselor presate.
In concordanta cu dotarea unitatilor industriale cu masini-unelte cu comanda numerica, lucrarile de montare pe masina si de evacuare a pieselor au revenit robotilor industriali, iar fabricile fara personal au inceput sa fiinteze prin combinatia dintre roboti si masini-unelte cu comanda numerica.
Un robot pentru sudare este echipat cu un pistol de sudura la extremitatea bratului sau si poate executa lucrari de sudare de mare precizie.In cazul lucrarilor de sudare prin puncte este necesar sa se realizeze sudarea automata prin grupe de roboti aranjati pe ambele parti ale liniei de sudura pentru a lucra asupra corpurilor caroseriilor de automobile.In cazul lucrarilor de sudare cu arc, robotii executa aceasta lucrare in concordanta cu conditiile sudurii cu arc, deplasandu-se de-a lungul unei linii fixate in exterior.
Au fost realizate progrese in domeniul lucrarilor de vopsire a caroseriilor vehicolelor folosindu-se in axclusivitate numai roboti.Robotii se deplaseaza cu viteza mare si realizeaza o vopsire uniforma.
In domeniul lucrarilor de asamblare care solicita mai multe maini omenesti pentru inlocuirea acestora au fost executati roboti pentru asamblare care recunosc forme si pozitii ale componentelor.
Robotii industriali executa in prezent lucrari in domenii dificile cum sunt cele ale presarii, strunjirii si rectificarii precum si in medii agresive (lucrari de sudare, vopsire, turnare in matrite, forjare).
Indiferent de domeniul in care este utilizat, robotul trebuie sa indeplineasca urmatoarele functii principale :
-sa recunoasca, pe baza unui proces de instruire, mediul care sa lucreze si operatiile pe care trebuie sa le execute ;
-sa stabileasca modul de deplasare a partilor sala mobile in concordanta cu operatiile de executat ;
-sa execute aceste operatii fara a fi necesara interventia omului.
In functie de nivelul atins in realizarea acestor functii si de solutiile care au fost alese pentru relizarea lor se disting urmatoarele categorii de roboti industriali:
-manipulatoare simple, dotate cu comenzi secventiale si care au un numar redus de grade de libertate (2-3). Posibilitatile de programare a acestor manipulatoare sunt limitate ;
-roboti industriali propriu-zisi. Acestia sunt manipulatoare automate programabile avand 4-8 grade de libertate, dotate cu un sistem de comanda complex care este capabil sa memoreze si sa execute programe stabilite. Acesti roboti sunt lipsiti de capacitati senzoriale, nu dispun de circuite de reactie si nu reactioneaza la modificarile aleatoare ale mediului ambiant ;
-roboti inteligenti. Acesti roboti sunt dotati cu organe senzoriale tactile sau vizuale si cu sisteme de conducere evoluate. Aceste sisteme asigura adaptarea comportarii robotului in functie de semnalele receptionate de la elementele senzoriale.
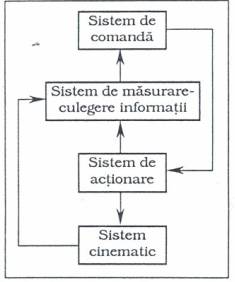
Indiferent de gradul de complexitate, structura standard a unui robot industrial este formata din urmatoarele sisteme: sistemul cinematic, sistemul de actionare, sistemul de comanda si sistemul de masura-culegere de informatii.
Structura tip a unui robot industrial este prezenata in figura 1.3.
De regula, strucrura sistemului de calcul a comenzii industriali este organizata pe doua nivele. Nivelul inferior este constituit din microprocesoare. Fiecare grad de libertate a robotului corepunde unui microprocesor. Microprocesoarele indeplinesc functii de comanda a miscarilor robotului, de regula, in regim de reglare numerica directa.
Echipamentul de calcul de la nivelul superior realizeaza functii de coordonare a miscarilor robotului si de instruire. Acest echipament este format dintr-un minicalcurator sau microcalculator cu capacitate de calcul mare. La acest nivel se pot implementa, de asemenea, echipamente de memorie externa pentru memorarea mai multor programme de activitate, dispozitive de vizualizare care sa evidentieze starea robotului precum si pupitrul de comanda prin intermediul caruia operatorul transmite robotului informatiile necesare executarii unei succesiuni de operatii.
In situatiile in care robotul este echipat cu camera de luat vederi (ochi artficial) sau cu alte dispozitive performante acestea sunt conectate tot la nivelul superior al sistemului de echipamente de calcul.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3366
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved