| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Transforma impulsurile electrice de tensiune in deplasari unghiulare discrete, astfel ca la primirea unui impuls, rotorul isi schimba pozitia cu un unghi bine precizat. Ca urmare ele se comporta ca niste convertoare electromecanice numeric-analogice.
Au o larga aplicare in sistemele de comanda automata pe baza de program a ctionarilor masinilor-unelte, a unor mecanisme si dispozitive din comanda perifericilor calculatoarelor. Aceste masini permit realizarea unor sisteme automate de tip discret care nu au nevoie de legaturi inverse, deoarece stabilesc o corespondenta directa riguros univoca intre informatia primita si deplasarea unghiulara realizata.
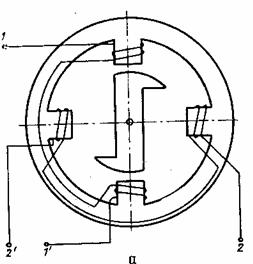
Se construiesc in mai multe variante putand avea unul sau mai multe statoare, infasurari de comanda distribuite sau concentrate, rotor cu poli aparenti sau magneti permanenti.Pentru intelegerea principiului de functionare se considera motorul din figura de mai jos, care are un rotor cu reluctanta variabila cu o pereche de poli, statorul avand trei perechi de poli aparenti.

Pe fiecare pol se gaseste o infasurare de
comanda concentrata, si se alimenteaza inseriindu-se infasurarile unei perechi
de poli( poli opusi) cu tensiune continua. La trecerea unui curent prin
infasurarea 1-1, rotorul este supus unui cuplu electromagnetic sub actiunea
caruia se deplaseaza pana cand axa sa se suprapune peste axa polilor
statorici.Daca se intrerupa alimentarea fazei 1-1 si se alimenteaza 2-2,
rotorul va lua o noua pozitie corespunzatoare axei acestor poli, deplasandu-se
cu un unghi ![]() grade (1). Pentru a micsora unghiul corespunzator unui pas se
creste numarul de poli rotorici, folosindu-se un rotor multipolar.
grade (1). Pentru a micsora unghiul corespunzator unui pas se
creste numarul de poli rotorici, folosindu-se un rotor multipolar.

Asa cum se poate observa din relatia 1, micsorarea unghiului de pas se poate realiza in continuare prin marirea numarului de poli pe rotor sau stator, sau prin folosirea masinilor cu mai multe rotoare si statoare.

O alta solutie, dezvoltata din motorul sincron autoreductor este motorul pas cu pas reductor.

La
suprafata rotorului si a pieselor polare statorice se gasesc o serie de
crestaturi deschise formand un numar de dinti cu acelasi pas pentru stator si
rotor. Dintii rotorului sunt la un moment dat pe aceeasi axa cu dintii polilor
1-1, dar decalati cu o treime de pas in urma fata de polii 2-2 si cu o treime
de pas inainte fata de polii 3-3. La alimentarea succesiva a polilor
statorici, rotorul se deplaseaza cu cate o treime de pas, cautand in fiecare
caz sa-si gaseasca o pozitie de reluctanta minima. Pentru un ciclu complet in
care sunt alimentati pe rand toti polii statorici, rotorul se va deplasa cu un
dinte, respectiv cu un unghi de 360/Zr. In cazul general pentru un
motor cu 2ps poli statorici, pasul de deplasare este ![]() .
.
Daca miscarea directa este liniara se poate utiliza un motor pas cu pas liniar, realizat dintr-un MP si doi electromagneti EMB si EMA si o suprafata danturata feromagnetica. Ansamblul este mentinut suspendat cu ajutorul unei perne de aer.

In absenta curentului prin electromagnet, el se aseaza astfel incat reluctanta circuitului sau magnetic pentru liniile de camp ale magnetului permanent sa fie minima (EMA a). Alimentarea unui electromagnet este astfel realizata incat sa anuleze campul produs de MP sub un capat al electromagnetului si sa-l majoreze sub celalalt (a EMB). Daca in tactul urmator se alimenteaza EMA si se decupleaza EMB (b), se vede ca pentru a avea reluctanta minima ansamblul se deplaseaza un sfert de pas dentar. La o noua modificare a alimentarii avem o noua deplasare (c), respectiv la un ciclu avem o deplasare de un pas.
Utilizand doua astfel de motoare cu directii de deplasare perpendiculare se poate obtine un sistem cu deplasare pe doua axe.

Schema de principiu a alimentarii motoarelor pas cu pas este prezentata in figura de mai jos, cele m faze fiind alimentate prin m tranzistoare de putere fiecare functionand un timp de T/m.

Pentru frecvente reduse de alimentare, curentul are practic forma tensiunii de puls dreptunghiular, deoarece perioada acestor pulsuri este mult mai mare decat constanta de timp a infasurarilor(apros10ms) (b). La frecvente mai ridicate perioada de repetitie a pulsurilor de tensiune devine de acelasi ordin de marime sau chiar mai mica decat constanta de timp a infasurarii, iar in infasurare incep sa se induca t.e.m. de rotatie de valoare importanta si ca urmare, curentul nu mai poate atinge valoarea sa initiala, ceea ce are ca efect o scadere a cuplului electromagnetic produs de masina.
Pentru imbunatatirea performantelot motoarelor pas cu pas se pot utiliza diferite metode cum ar fi: introducerea de rezistente in serie cu fazele motorului, alimentarea de la o sursa de curent constant. O alta solutie este utilizarea unei a doua surse de tensiune mai mare, sursa care sa asigure pentru un timp scurt un puls de tensiune care sa produca o crestere accelerata a curentului din infasurare.

Motoare sincrone pas cu pas cu 2 infasurari de comanda respectiv cu una

In figura a se poate vedea schematic un astfel de motor, iar in b este prezentata variatia cuplului cu unghiul dintre axa infasurarii alimentate si axa rotorului.

Caracteristicile unghiulare ale mpp cu MP
M=-kmΨ0I sinθ reprezinta ecuatia cuplului electromagnetic produs asupra unui MP sau a unei armaturi cu excitatie electromagnetica, si in care: Ψ0 este fluxul produs de MP sau infasurarea de excitatie, I curentul din infasurarea de comanda,iar θ unghiul dintre axele celor doua sisteme.

Cuplul de sarcina limita pentru care motorul poate functiona este dat de relatia:
Ml=Msmaxcos(π/m), unde m- numarul de faze ale masinii. Se poate observa astfel ca un astfel de motor trebuie sa aiba minim doua faze pentru a demara.
Este posibila functionarea cu doua sau chiar o singura faza, daca dantura statorica este asimetrica si ca urmare caracteristica mecanica este deformata (fig b de la mot cu 2 infasurari).
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 37
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved