| CATEGORII DOCUMENTE |
| Agricultura | Asigurari | Comert | Confectii | Contabilitate | Contracte | Economie |
| Transporturi | Turism | Zootehnie |
| Navigatie |
1. NOTIUNI INTRODUCTIVE
Cunoasterea formei Pamantului si a parametrilor acestuia a aparut ca o necesitate a dezvoltarii societatii omenesti din timpuri extrem de indepartate. Primele afirmatii scrise in legatura cu forma Pamantului sunt legate de istoria Mesopotamiei (sec.XXX i.C.), afirmatii cu privire la forma de 'disc' a acestuia fiind intalnite si in poemele homerice (sec.X i.C). Prima ipoteza privind forma sferica a Pamantului a fost emisa, dupa unii istoriografi, de Thales din Milet (anul 600 i.C.), iar dupa altii de catre Pitagora (anul 550 i.C.), insa prima determinare a razei unei sfere care aproximeaza figura Pamantului se face mult mai tarziu, de catre Eratostene (276-195 i.C.). Acesta a determinat raza sferei terestre dupa principiul masuratorilor graduale, principiu aplicat pe scara larga si in epoca moderna. In fig.1 este schitat principiul matematic aplicat acum mai bine de doua milenii de Eratostene:
l = Rn , (1)
unde n trebuie exprimat in radiani (pentru compatibilitatea unitatilor de masura), si rezulta:
l = Rnp (1')
de unde:
R=(l180)/(np) (2)
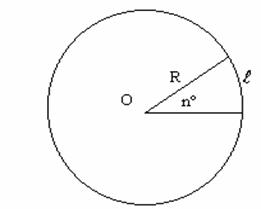
[Fig.1 ] Principiul masurarilor graduale
Eratostene, bibliotecar sef si director al muzeului din Alexandria (care, la acea vreme, era un centru cultural important al lumii mediteraneene), a aplicat acest procedeu, utilizand insa un rationament mai simplu. El a observat ca in ziua solstitiului de vara, la amiaza, Soarele se putea vedea in apa celor mai adanci fantani din localitatea Syene (astazi Aswan), deci avea in acel moment inaltimea deasupra orizontului de 90. In aceeasi zi, la aceeasi ora, a masurat inaltimea Soarelui in Alexandria, situata mai la nord, aproximativ pe acelasi meridian, si a obtinut valoarea 8248'. Pentru aceasta a masurat lungimea umbrei unui gnomon (bat infipt vertical in Pamant, de lungime cunoscuta, fig.2a); din triunghiul dreptunghic format de bat si de umbra sa, se deduce imediat unghiul pe care il fac razele Soarelui cu suprafata Pamantului. In continuare, facand diferenta celor doua valori de inaltime, a obtinut valoarea unghiului la centrul sferei format de razele corespunzatoare celor doua localitati alese, adica n=712' (fig.2b) :
Observatie : S-a considerat ca Soarele este plasat la o distanta infinit de mare, astfel ca razele de lumina sunt paralele.

[Fig.2a ] Gnomonul [Fig.2b ] Determinarea unghiului la centrul sferei (n)
Eratostene a aproximat valoarea unghiului la centrul sferei terestre ca fiind a 50-a parte din cerc. El a mai masurat si distanta dintre cele doua localitati, pe care a apreciat-o ca fiind 5000 de stadii (a folosit pentru aceasta o caravana ce a acoperit distanta terestra intre cele doua localitati). Rezulta imediat ca circumferinta Pamantului este de 500050 = 250 000 de stadii.
Nu s-a putut stabili din ce motive Eratostene a determinat, totusi, circumferinta Pamantului, ca fiind egala cu 252 000 stadii. De asemenea nu se cunoaste cu precizie echivalentul unei stadii (unitate de masura a distantei la acea vreme) in metri. Daca se aproximeaza ca o stadie masoara 158 m, atunci circumferinta Pamantului rezulta:
252 000158 = 39 820 Km.
In consecinta, raza sferei corespunzatoare va fi de 6338 Km, valoare care este foarte apropiata de cea reala, determinata cu mijloace moderne (Langley R.,B., 1992), desi in rationamentul adoptat s-au strecurat mai multe inexactitati (Aswan nu se gaseste situat pe tropicul Cancerului si nici pe acelasi meridian cu Alexandria, ci cu 300 km la est, arcul de sfera determinat de cele doua localitati nu este egal cu a 50-a parte din circumferinta cercului, s.a.). Cu toate acestea, valoarea determinata de Eratostene nu a mai fost imbunatatita decat abia in sec. al XVII-lea.
FORMA PAMANTULUI.
Asa cum se poate lesne constata, forma reala a Pamantului este absolut neregulata, imposibil de modelat matematic in mod fidel. Ca urmare a acestui fapt, atentia oamenilor de stiinta, in special a geodezilor, s-a concentrat asupra problemei aproximarii formei reale a Pamantului cu un corp geometric, care sa fie regulat si care sa nu se indeparteze foarte mult de figura reala, neregulata, a Pamantului.
Exista in principiu doua posibilitati de aproximare a formei (figurii) Pamantului: aproximarea fizica si aproximarea matematica.
Corpul care aproximeaza fizic Pamantul se numeste GEOID. Acesta este corpul care are suprafata data de suprafata linistita a marilor si oceanelor Pamantului, prelungita pe sub continente. In consecinta, geoidul nu ia in considerare formele nesemnificative de relief.
O alta maniera de definire a geoidului face apel la notiuni de teoria potentialului. Astfel, se defineste potentialul unei forte, ca fiind functia ale carei derivate partiale pe axele de coordonate sunt chiar proiectiile fortei pe axe. Multimea punctelor din spatiul R3 care au acelasi potential, definesc o suprafata echipotentiala. Daca forta in cauza este forta gravitatii (se mai numeste si greutate, si este suma dintre forta efectiva de atractie a Pamantului si forta centrifuga), atunci potentialul sau se numeste potentialul gravitatii.
In acest context, geoidul se defineste ca fiind corpul avand suprafata echipotentiala de nivel zero (nivelul mediu al marilor si oceanelor). Aceasta definitie a fost introdusa de Listing in anul 1873, si a fost propusa, ulterior, de Gauss, ca figura a Pamantului.
Verticala unui punct este directia firului cu plumb, si este dreapta definita de acel punct si centrul de masa al Pamantului. Altfel, verticala unui punct este definita ca fiind directia gradientului functiei potential. In consecinta, verticala oricarui punct de la suprafata Pamantului este perpendiculara pe geoid (ca o consecinta a definitiei notiunii de gradient)-fig.4.
Urmare a distributiei nesferice (neomogene) a densitatii Pamantului, suprafata geoidului nu este regulata; in consecinta, utilizarea geoidului ca suprafata de referinta, la care sa se reduca toate masuratorile geodezice ori de navigatie, este restrictiva.
Din acest considerent, a fost necesara o a doua aproximatie a formei Pamantului. Aceasta este legata de numele lui Newton, care in anul 1687 fundamenteaza teoria asupra atractiei universale, pe baza careia postuleaza doua concluzii extrem de importante :
1) Forma de echilibru a Pamantului este reprezentata de un elipsoid de rotatie cu turtire mica la poli. Valoarea data de Newton turtirii a fost de 1/230) ;
2) Gravitatia (greutatea) creste de la ecuator catre poli.
Newton a demonstrat aceste afirmatii pe baza masuratorilor precise ale timpului cu ajutorul pendulului (acesta ramane in urma daca este plasat la ecuator, urmare a gravitatii scazute). Ulterior, expeditiile efectuate in Lapland si Peru (1736-1744) pentru masurarea arcelor de meridian, au confirmat ipotezele lui Newton.
Doua sute de ani mai tarziu, odata cu lansarea satelitilor artificiali ai Pamantului, s-au putut verifica din nou aceste ipoteze. Mai mult, lansarea satelitului Vanguard 1 la 17 martie 1958, a facut posibila determinarea faptului ca Pamantul are forma 'de para', polul sud fiind mai apropiat de centrul Pamantului decat polul nord cu cca. 20 km. De asemenea, s-a determinat faptul ca Pamantul contine o deformare (un bulb) la sud de ecuator (Smith J.,R.,1988).
In concluzie, in a doua aproximatie, Pamantul se asimileaza unui elipsoid de revolutie, obtinut prin rotatia elipsei meridiane in jurul axei mici (2b), numita si axa polara (fig.3). Dreapta N care trece prin punctul oarecare M si este perpendiculara pe suprafata elipsoidului, se numeste normala la elipsoid.
[Fig.3 ] Elipsoidul de revolutie
Parametrii elipsoidului de revolutie sunt:
semiaxa mare (ecuatoriala) a ;
semiaxa mica (polara) b ;
prima turtire f = 1-b/a .
Se definesc urmatorii parametri secundari ai elipsoidului :
prima excentricitate e = (1 - b2/a2)1/2 ;
raza de curbura polara c = a/b2.
Pe baza unor determinari astronomo-geodezice si satelitare precise, s-au determinat urmatoarele modele elipsoidale (figuri matematice) ale Pamantului, numite elipsoizi de referinta:
|
Numele elipsoidului |
Anul |
Semiaxa mareA |
Semiaxa micab |
Turtireaf |
|
BESSEL |
6377397m | |||
|
CLARKE | ||||
|
HAYFORD | ||||
KRASOVSKY | ||||
|
WGS72 | ||||
|
UAI1976 | ||||
|
WGS 84 |
OBSERVATIE : WGS = World Geodetic System ;
UAI = Uniunea Astronomica Internationala.
In fig.4 este reprezentata suprafata reala a Pamantului, pe care s-au ales doua puncte arbitrare M si M . Sunt reprezentate de asemenea suprafata geoidului (cu verticala locului V) si suprafata elipsoidului de revolutie (cu normala N).

[Fig.4 ] Suprafata fizica, geoid, elipsoid
Pentru a rezolva expeditiv anumite probleme practice ale navigatiei, s-a adoptat (intr-o a treia aproximatie) ca model matematic al Pamantului, sfera. Desi mai putin precis decat modelul elipsoidal, modelul sferic al Pamantului satisface majoritatea necesitatilor navigatiei. Asimilarea elipsoidului terestru cu sfera terestra se face pe considerentul ca diferentele intre cele doua suprafete sunt, la nivelul de precizie impus de unele probleme ale navigatiei, acceptabile. De exemplu, indicarea distantelor parcurse de nava (cu aparatura de bord) este afectata de o eroare de 1%; in acelasi timp, eroarea introdusa de aproximarea suprafetei sferice a Pamantului nu depaseste procentul de 1% in determinarea acelorasi distante. Ca urmare, acest nivel de precizie se considera a fi satisfacator.
Sfera terestra se defineste ca fiind sfera cu volumul egal cu cel al elipsoidului de referinta, ales ca model matematic al Pamantului. Pornind de la aceasta egalitate, se poate determina raza sferei terestre (avand ca model elipsoidul Hayford, numit si elipsoid international):
4pR3/3 = 4pa2b/3 T R = (a2b)1/3 = 6371.1 km (4)
CURSUL 2
3. ELEMENTELE SFEREI SI ELIPSOIDULUI TERESTRU
In fig.5 si fig.6 sunt reprezentate in perspectiva modelele sferic, respectiv elipsoidal ale Pamantului. Pentru ambele modele matematice se definesc urmatoarele elemente comune ale acestora :
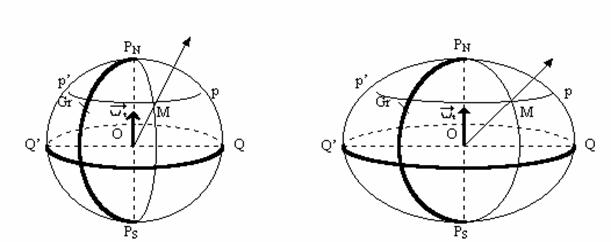
[ Fig.5 ] Sfera terestra Fig.6 ] Elipsoidul terestru
O , centrul sferei (elipsoidului) ;
M , punct oarecare pe suprafata sferei (elipsoidului) ;
axa PNPS , axa de rotatie a Pamantului, numita si axa polilor; vectorul ![]() este vectorul viteza unghiulara de
rotatie a Pamantului in jurul axei polilor;
este vectorul viteza unghiulara de
rotatie a Pamantului in jurul axei polilor;
PN , PS , polul nord terestru, respectiv polul sud terestru, puncte in care axa polilor inteapa sfera (elipsoidul) ;
cercurile mari, sunt cercuri pe suprafata sferei terestre, ale caror plane contin centrul sferei; cercurile mici, sunt cercuri ale caror plane nu contin centrul sferei. Cercurile mari au raza egala cu raza sferei terestre, in timp ce cercurile mici au razele mai mici decat raza sferei terestre;
planele axiale, plane care contin axa polilor ;
planul ecuatorului, plan perpendicular pe axa polilor care contine centrul sferei (elipsoidului). Acesta imparte sfera terestra in doua emisfere : emisfera nordica este emisfera care contine polul nord geografic iar emisfera sudica este emisfera care contine polul sud geografic;
ecuatorul terestru, este cercul mare pe suprafata sferei (elipsoidului), rezultat din intersectia planului ecuatorului cu sfera, respectiv cu elipsoidul (se noteaza cu QQ');
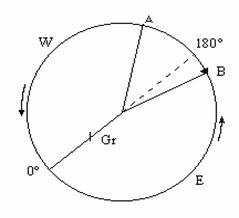
meridianele sunt semicercuri mari de la un pol la celalalt. Meridianele rezulta din intersectia planelor axiale cu sfera, respectiv cu elipsoidul; pe sfera, meridianele sunt semicercuri, iar pe elipsoid sunt jumatati de elipse. S-a ales ca meridian origine, meridianul care trece prin centrul optic al instrumentului meridian al observatorului astronomic Greenwich (the Old Greenwich Astronomical Observatory). Acest meridian se numeste meridianul Greenwich, primul meridian sau meridianul zero; el imparte sfera terestra in doua emisfere: emisfera estica si emisfera vestica. In navigatie se opereaza des cu notiunea de antimeridian al unui meridian. Spre exemplu, daca se face referire la meridianul de 030E, atunci antimeridianul acestuia este meridianul de 150W. In mod identic, atunci cand se face referire la meridianul Greenwich, atunci se va intelege ca antimeridianul lui este meridianul de 180 (acesta se mai numeste si meridianul de schimbare a datei);
paralelele sunt cercuri mici ce rezulta din intersectia sferei (elipsoidului) cu plane paralele cu planul ecuatorului.
Ca urmare, prin orice punct de pe suprafata sferei (elipsoidului) trec un meridian si un paralel. Se definesc deci, pe sfera terestra, o infinitate de meridiane si, respectiv, de paralele;
Verticala unui punct oarecare M este dreapta determinata de centrul O al sferei (elipsoidului) si punctul M (se aproximeaza faptul ca centrul sferei/elipsoidului coincide cu centrul de masa al Pamantului, numit si geocentru). Segmentul OM se numeste raza sferei terestre (R) pe sfera, respectiv raza vectoare geocentrica (r) pe elipsoid. Pe sectiunea meridiana a sferei terestre trasata prin punctul M (fig.7) se poate evidentia cu usurinta faptul ca verticala punctului M este perpendiculara la tangenta (TT') dusa la cercul meridian, si deci coincide cu normala. In fig.8, in care s-a reprezentat sectiunea meridiana a elipsoidului dusa prin punctul ales M, se poate observa ca raza vectoare geocentrica (OM = r) nu este perpendiculara pe tangenta TT' la elipsa meridiana. Pe elipsoid, normala (N) a unui punct nu coincide cu verticala sa (V).
Fig.7 Sectiunea meridiana [Fig.8] Sectiunea meridiana
a sferei terestre a elipsoidului
4. SISTEME DE COORDONATE
Coordonatele unui punct reprezinta parametrii ce caracterizeaza pozitia acestuia fata de un sistem de referinta ales. Sistemul de referinta este un sistem de plane, axe, curbe, etc. ce serveste ca reper fata de care se pozitioneaza puncte.
Pozitia punctelor fata de sistemul de referinta se determina prin distanta la planele (sau axele) sistemului ori prin distanta la origine si unghiul fata de o axa. Acesti parametri (distante, unghiuri, etc.) constituie coordonatele punctului.
Ca sistem de coordonate pentru pozitionarea pe sfera terestra a navei, a reperelor si pericolelor de navigatie, etc. s-a ales sistemul de coordonate sferice, (avand in vedere forma sferica a modelului matematic al Pamantului acceptat in navigatie). Pentru studiul problemelor de cartografie matematica si in general al problemelor de geodezie si hidrografie se utilizeaza alte sisteme (sistemul de coordonate rectangulare plane, geocentrice ecuatoriale, geodezice, etc.)
4.1. SISTEMUL DE COORDONATE GEOGRAFICE
Sistemul de coordonate geografice este sistemul utilizat in general in navigatie, pentru pozitionarea diferitelor puncte de interes pe sfera terestra.
Sistemul de referinta este format din doua plane perpendiculare, si anume:
planul ecuatorului;
planul meridianului Greenwich.
Urmele lasate de aceste doua plane pe sfera terestra sunt:
ecuatorul;
meridianul Greenwich.
Diversele puncte de interes se vor pozitiona fata de aceste doua cercuri mari care reprezinta in fapt axele sistemului de referinta al sistemului de coordonate geografice.
Pozitia unui punct oarecare de pe suprafata sferei terestre se va defini prin doua coordonate (j, l), numite coordonate geografice, definite astfel (fig.9
LATITUDINEA GEOGRAFICA j a punctului A este arcul de meridian (sau unghiul la centrul sferei corespunzator), masurat de la ecuator pana la paralelul locului. Latitudinea geografica se masoara in unitati de arc sexagesimale, si ia valori de la 000(cand punctul A este situat pe ecuator) la 090(cand punctul A este situat in unul din polii geografici).
Cand punctul A se afla in emisfera nordica, valorii latitudinii geografice a acestuia i se atribuie conventional semnul algebric +, iar cand acesta se afla in emisfera sudica terestra, semnul algebric - .
In consecinta latitudinea geografica se exprima precizand numele emisferei (N sau S) sau precizand semnul algebric corespunzator (+ sau -). In navigatie, precizia de determinare a latitudinii geografice este de zecime de minut de arc. Deci :
jM = 04346'.2 N , sau
jM
[Fig.9] Coordonate geografice.
LONGITUDINEA GEOGRAFICA (l a punctului M este arcul de ecuator (sau unghiul la centrul sferei corespunzator), masurat de la meridianul Greenwich pana la meridianul locului. Se masoara in unitati de arc sexagesimale si ia valori de la 000 (cand punctul se afla pe meridianul Greenwich) pana la 180 (cand punctul se gaseste pe antimeridianul Greenwich).
Pentru punctele situate in emisfera estica, longitudinii acestora i se atribuie conventional semnul +, iar pentru puncte situate in emisfera vestica, semnul -. Longitudinea geografica a unui punct se exprima deci precizand numele emisferei terestre in care acesta se gaseste (E sau W) sau precizand semnul algebric (+ sau -). Valoarea longitudinii se exprima la o precizie de zecime de minut. Deci :
l M = 14923'.7 W , sau
l M = -14923'.7 .
Se observa ca atat latitudinea cat si longitudinea sunt arce de cerc orientate.
In concluzie, coordonatele geografice caracterizeaza pozitia verticalei punctului fata de planul ecuatorului si fata de planul meridianului Greenwich.
In situatiile in care coordonatele geografice sunt folosite ca elemente de calcul, se recomanda sa fie notate cu semnele lor algebrice (+ sau -) si nu cu sensurile de contare (N, S, E, W), pentru a usura efectuarea operatiunilor.
4.2. POZITIILE RECIPROCE A DOUA PUNCTE PE SFERA TERESTRA. DIFERENTE DE COORDONATE GEOGRAFICE
In practica navigatiei, pe langa determinarea pozitiei unui punct izolat pe sfera terestra, apare necesitatea determinarii pozitiilor reciproce a mai multor puncte. Din acest motiv a aparut ca necesara introducerea notiunii de diferente de coordonate geografice. De asemenea, deplasarea navei pe sfera terestra presupune modificarea permanenta a coordonatelor sale geografice; pentru a preciza la un moment dat pozitia navei fata de punctul initial (ale carui coordonate se presupun a fi cunoscute), este necesara introducerea si utilizarea notiunii de diferente de coordonate geografice.
Pozitiile reciproce a doua puncte pe sfera terestra se determina cu ajutorul diferentelor lor de coordonate: diferenta de latitudine si diferenta de longitudine.
Sa consideram ca o nava merge de-a lungul meridianului locului, din punctul de plecare A (fig. 10) pana in punctul de sosire B; se observa ca longitudinea ramane neschimbata pe tot parcursul, latitudinea insa se schimba. Latitudinea punctului B este diferita de cea a punctului A cu o cantitate egala cu masura arcului AB = <AOB, care poarta denumirea de diferenta de latitudine.
[Fig.10] Diferenta de latitudine
DIFERENTA DE LATITUDINE (Dj) dintre punctele A si B (unde punctul A este considerat punct de plecare sau punct initial, iar punctul B este considerat punct de aterizare sau punct final) este arcul de meridian (sau unghiul la centrul sferei corespunzator) masurat de la paralelul punctului de plecare (A) pana la paralelul punctului de sosire (B).
Diferenta de latitudine este deci un arc de meridian orientat.
Diferenta de latitudine primeste conventional semnul algebric (+), atunci cand orientarea vectorului AB este nordica si invers, se considera a fi negativa si va primi semnul (-) cand orientarea vectorului AB este sudica. Cu alte cuvinte, va fi pozitiva cand nava se deplaseaza catre nord, si negativa cand nava se deplaseaza catre sud.
Diferenta de latitudine ia valori de la 000 (cand nava se deplaseaza de-a lungul unui paralel) pana la 180 (cand punctele A si B se gasesc in cei doi poli terestri), si se exprima in grade, minute si zecimi de minut. Exemplu :
Dj = 02946'.8 N
Dj =+02946'.8 .
Dj=jB
- jA
Cunoscand
coordonatele geografice ale punctelor A si B, diferenta de latitudine
dintre ele se va calcula cu relatia:
(5)
Relatia este valabila si pentru cazul in care A si B se gasesc in emisfere diferite (nava trece din emisfera sudica in emisfera nordica, ori invers).
In practica, diferenta de latitudine se va calcula dupa urmatorul tip de calcul :
Exemplu: O nava pleaca de la ancora din punctul A (jA = 041 25'.5 N si aterizeaza in punctul B ( j B = 04655'.2 N). Sa se calculeze diferenta de latitudine.
1) Calculul Dj
jB
-jA .5
Dj
DIFERENTA DE LONGITUDINE (Dl dintre punctele A si B, unde A este punct de plecare sau punct initial, iar B este punct de aterizare sau punct final, este arcul de ecuator (sau unghiul la centrul sferei corespunzator), masurat de la meridianul punctului A pana la meridianul punctului B.
[Fig.11] Diferenta de longitudine
Diferenta de longitudine este deci un arc de ecuator orientat. Astfel, Dl se considera a fi pozitiva si primeste semnul algebric + daca orientarea vectorului AB este estica, sau negativa, si va primi semnul algebric -, daca orientarea vectorului AB este vestica. Cu alte cuvinte, Dl este pozitiva cand nava se deplaseaza in sensul rotatiei Pamantului si negativa cand nava se deplaseaza in sens opus sensului rotatiei Pamantului.
Diferenta de longitudine ia valori de la 000 (cand nava se deplaseaza pe acelasi meridian) pana la 180 (cand punctul B se gaseste pe antimeridianul punctului A). Diferenta de longitudine se masoara in grade, minute si zecimi de minut :
Dl = 07632'.9 W
Dl
Cunoscand coordonatele geografice ale punctului de plecare A si ale punctului de sosire B, diferenta de longitudine dintre cele doua puncte se calculeaza cu relatia algebrica:
Dl lB lA
In practica, diferenta de longitudine se va calcula utilizand urmatorul tip de calcul:
Exemplu: O nava pleaca de la ancora din punctul A (lA = 03435'.2E) si aterizeaza in punctul B (lB=04144'.1 E). Se cere sa se calculeze Dl .
Calculul Dl
l B = +04144'.1
- lA
Dl
Relatia si tipul de calcul sunt valabile pentru toate situatiile, mai putin cazul trecerii navei din emisfera estica in cea vestica (ori invers) prin intersectarea meridianului de 1800
In aceasta situatie, aplicand relatia de calcul, rezultatul va fi intotdeauna mai mare decat 180, si ca urmare, rezultatul final se scade din 360 , si i se schimba semnul.
[Fig.12 ] Stabilirea semnului lui Dl
Se va analiza cazul trecerii navei dintr-o emisfera in alta prin intersectarea antimeridianului Greenwich (Fig.12) pe un exemplu practic :
Exemplu: Nava pleaca de la ancora din punctul A ( jA=00538'.7N , lA=17725'.8W) si aterizeaza in punctul B (jB = 00312'.4 S ,lB=17529'.4E). Sa se calculeze diferentele de coordonate geografice dintre punctele A si B.
Rezolvare
1) Calculul Dj 2) Calculul Dl
j B = -00312'.4 l B
jA - lA
Dj Dl = +35255'.2
360 = 35959'.10
- Dl = -35255'.2
Dl = -00704'.8
Pentru verificarea semnului obtinut din calculul algebric, se compara sensul de deplasare a navei ( vectorul AB) cu sensul de rotatie a sferei terestre in jurul axei proprii (sensul direct). Daca cele doua sensuri coincid, atunci semnul lui Dl este +, iar daca sensurile sunt opuse, atunci Dl va avea semnul - .
In cazul analizat, sensul de deplasare a navei se opune sensului de rotatie a sferei terestre in jurul axei proprii, deci semnul lui Dl este minus.
CURSUL 3
5. LUNGIMEA UNITATII DE ARC PE ELIPSOID
Determinarea valorii lungimii unui arc subintins de un unghi la centrul sferei de 1' are o deosebita importanta in navigatie, deoarece aceasta constituie baza sistemului de unitati de masura pentru distante.
Daca modelul Pamantului este sfera, atunci lungimea in metri a unui minut arc de cerc mare (meridian sau ecuator) este constanta, si se poate deduce imediat:
![]()
Daca insa modelul Pamantului se considera elipsoidul de revolutie, atunci lungimea unui minut arc de ecuator nu va mai fi egala cu lungimea unui minut arc de meridian. In plus, ca urmare a turtirii la poli a elipsoidului, lungimea minutului arc de meridian nu este constanta, ci variaza cu latitudinea.
5.1. LUNGIMEA ARCULUI ELEMENTAR DE MERIDIAN
Pentru calculul lungimii elementare a arcului de meridian se considera in figura.13 doua puncte S1 si S2 pe o elipsa meridiana, plasate la o diferenta infinit mica de latitudine dj. Rezulta imediat ca:
ds = Mdj (7)
unde M este raza de curbura meridiana, data de relatia:
M=a(1-e2)/(1-e2sin2 j (Ghitau, 1983),
Inlocuind in (7) si integrand in limitele j si j prin dezvoltare in serie de puteri (Taylor), rezulta relatia exacta de calcul a lungimii arcului de meridian:
S1-2 = 111134.861(j j )-16036.480(sin2 j 2-sin2 j 1)+16.828(sin4 j -sin4j
Coeficientii numerici ai relatiei sunt
functie de semiaxa mare (a) si excentricitatea (e)
a elipsoidului de referinta (in cazul de mai sus, elipsoid de referinta s-a considerat a fi elipsoidul Krasovsky).
Fig.13
Pentru calcule expeditive, trebuie stiut ca :
arc 1 111Km ;
arc 1' 1852.3 m;
arc 1' 31 m .
Pentru nevoile navigatiei intereseaza doar valoarea lungimii arcului de 1', iar aceasta se poate calcula expeditiv cu relatia aproximativa:
Larc 1' [m] = 1852.3 [m] - 9.3cos 2j (9)
5.2. LUNGIMEA ARCULUI ELEMENTAR DE ECUATOR SI PARALEL
Pentru elipsoidul de revolutie, ecuatorul este un cerc, deci pentru calculul lungimii segmentului de arc cuprins intre doua meridiane separate de o diferenta de longitudine de 1', se va utiliza relatia:
![]()
in care a este semiaxa mare a elipsoidului de referinta, exprimata in metri.
In mod analog se calculeaza lungimea arcului de 1' de paralel de latitudine geografica cunoscuta:
![]() (11),
(11),
unde r este raza paralelului.
6. UNITATI DE MASURA UTILIZATE IN NAVIGATIE
6.1. UNITATI DE MASURA PENTRU DISTANTE
METRUL este lungimea egala cu 1 650 763.73 lungimi de unda in vid ale radiatiei care corespunde tranzitiei atomului de Kripton 86 intre nivelele sale 2p10 si 5d5 . Se noteaza cu [m].
In navigatie, se masoara in metri: adancimea apei, dimensiunile navei, inaltimile reperelor de navigatie, inaltimea ochiului observatorului fata de nivelul marii, etc.
MILA MARINA [Mm] este lungimea arcului de meridian de 1'.
Datorita excentricitatii elipsoidului terestru, lungimea milei marine variaza functie de latitudine. Relatia de calcul a milei marine functie de latitudinea geografica este data de relatia (vezi si rel.9):
![]()
(12)
Astfel, la latitudinea de 045, lungimea milei marine este :
1 Mm = 1852.3
m
Conferinta hidrografica Internationala din 1929 a adoptat ca valoare standard a milei marine 1852 m. Tara noastra, ca si o serie de tari europene ( Suedia, Germania, Rusia, Franta, Spania, etc.) au stabilit lungimea milei marine la 1852.0 m. In marina engleza, mila marina este egala cu lungimea arcului de 1' de meridian la latitudinea la care se naviga. De asemenea, in Statele Unite, 1M = 1853.248 m, reprezentand lungimea arcului de 1' de meridian al sferei cu suprafata egala cu suprafata elipsoidului de referinta. In Italia, Olanda si Danemarca, s-a adoptat pentru mila marina lungimea de 1851.85m .
Mila marina are un submultiplu si un multiplu:
cablul (cab) are lungimea egala cu a zecea parte dintr-o mila marina; deci :
1 cab = 185 m
leghea are lungimea egala cu 3M , deci
1 leghe = 5556 m.
In navigatie, mila marina se utilizeaza pentru a exprima distante mari (distante parcurse de nava, distante intre porturi, distante de vizibilitate, bataia farurilor, etc.).
In cabluri se exprima distantele mici (distante intre nave, distante in interiorul bazinelor portuare, etc.).
MILA ECUATORIALA este lungimea arcului de ecuator de 1'. Se noteaza cu simbolul [Me]. Valoarea milei ecuatoriale se calculeaza cu relatia 10.
Exemplu: Sa se calculeze lungimea milei ecuatoriale pentru elipsoidul de referinta WGS-84.
Rezolvare
1 Me = a1'/3438'=6378137/3438 = 1855.188m
Pentru elipsoidul International (Hayford) lungimea milei ecuatoriale este de 1855.39 m.
Mila ecuatoriala, ca valoare a arcului unitar de ecuator, reprezinta o deosebita importanta in cartografia matematica, in special in calculul canevasului hartilor marine.
De asemenea, deplasarea est-vest se masoara in Me.
OBSERVATIE: In unele lucrari apare termenul de mila statuara (statute mile); aceasta unitate de masura pentru distante nu seutilizeaza in navigatie, fiind utilizata pentru masuratori terestre in Anglia si Statele Unite ale Americii. Are valoare fixa, 1609.343m.
Este foarte important de retinut faptul ca in documentatia nautica engleza si americana, se utilizeaza unitati de masura aparte, reunite generic sub titulatura de sistem anglo-saxon de unitati de masura pentru lungimi.
In afara milei marine, acesta mai cuprinde :
YARDUL (yard) ; 1 yard = 0.914 m ;
PICIORUL (foot, feet) ; 1 foot = 1/3 yard = 0.305 m ;
INCI (inch) ; 1 inch = 1/36 yard = 25.4 mm.
BRATUL (fathom) ; 1 fathom = 2 yard = 1.83 m
Pe hartile englezesti si americane, adancimile sunt exprimate in brate si/sau in picioare, sau combinat in brate si metri.
CABLUL (cable) ; 1 cable = 100 fathoms = 200 yard=183 m.
6.2. UNITATI DE MASURA PENTRU UNGHIURI
In navigatie, masurarea unghiurilor este o operatiune fundamentala, fara de care nu ar fi posibila pozitionarea (determinarea pozitiei) navei pe sfera terestra, respectiv pe harta.
Unitatile de masura pentru unghiuri utilizate in navigatie sunt :
GRADUL SEXAGESIMAL [], reprezinta unghiul plan cuprins intre doua raze care intercepteaza, pe circumferinta unui cerc, un arc de lungime egala cu a 360-a parte a circumferintei cercului respectiv.
Submultiplii gradului sexagesimal sunt :
zecimea de grad [0.1] , a zecea parte dintr-un grad ;
minutul ['], a 60-a parte dintr-un grad ;
zecimea de minut [0'.1] a zecea parte dintr-un minut, deci 1/600 grade;
secunda ['], a 60-a parte dintr-un minut, deci 1/3600 grade.
In navigatie, se utilizeaza aproape in exclusivitate gradul sexagesimal pentru exprimarea unghiurilor. Astfel, drumurile si relevmentele se exprima in grade si zecimi de grad sexagesimal, unghiurile orizontale si verticale precum si coordonatele geografice ale punctelor se exprima in grade, minute si zecimi de minut sexagesimal.
RADIANUL [rad] este unitatea de masura pentru unghiul plan, egal cu unghiul cuprins intre doua raze care intercepteaza, pe circumferinta unui cerc, un arc de lungime egala cu raza cercului.
In tehnica, radianul reprezinta unitatea (in S.I.) de masura pentru unghiuri. In navigatie, se apeleaza des la exprimarea unghiurilor in radiani, atat in relatiile de calcul (in vederea compatibilizarii unitatilor de masura), cat si in programele de calcul create in vederea rezolvarii problemelor specifice navigatiei.
In mod curent, se pune problema transformarii unitatilor de arc exprimate in grade sexagesimale in radiani si invers. In rezolvarea acestei probleme se pleaca de la faptul ca uncerc intreg masoara 360 sau 2p rad, deci :
p [rad] (13)
Rezulta:
1= (2p)/(360) [rad] = p/180 [rad] = 1/57.3 [rad];
p 60) [rad] = p/(18060) [rad]=1/3438'[rad]; (14)
p 60) [rad]=p/(1806060) [rad]=1/206265'[rad].
1 [rad] = 360/2p p = 57,3 ;
1 [rad] = 57,3 60 = 3438' ; (15)
1 [rad] = 57,3 6060 = 206265' .
Relatiile (14) reprezinta relatiile de transformare din unitati sexagesimale in radiani, iar (15) reprezinta relatiile de transformare din radiani in grade sexagesimale.
Pentru calcule se utilizeaza urmatoarele valori :
p
p
Exemplu: Sa se exprime in radiani urmatoarele arce :
3) 12' ;
4) 37' .
Rezolvare :
1) 143 = 143/57.3 = 2.49 rad.
2) 321 = 321/57.3 = 5.602 rad.
3) 12' = 12'/3438' = 0.00349 rad.
4) 37' = 37'/206265' = 0.000179 rad.
6.3. UNITATI DE MASURA PENTRU TIMP
Timpul reprezinta una din cele 6 marimi fundamentale ale Sistemului International de Unitati de Masura, si are ca unitate de masura secunda.
SECUNDA este fractiunea 1/31 556 925.9747 din anul tropic 1900, 01 ianuarie, ora 12.00 a timpului efemeridei. Notiunile de an tropic si efemerida se vor studia in cadrul cursului de Astronomie Nautica. Trebuie retinut ca, in acceptiunea curenta, prin notiunea de an se intelege intervalul de timp necesar Pamantului sa parcurga o orbita completa in jurul Soarelui.
In navigatie, in general, se opereaza cu notiunea de timp mediu (timp social), dupa care se ghideaza intreaga viata sociala. Acesta se mai numeste GMT (Greenwich Mean Time). Exista mai multe categorii de timp (timp sideral, timp solar, timp lunar, timp planetar, timp universal coordonat (UTC), timpul efemeridelor, timp GPS, etc.), cu aplicatii in diferite domenii ale navigatiei.
In afara secundei, se opereaza in mod curent cu :
minutul , unitate de timp egala cu 60 de secunde;
ora , unitate de timp egala cu 60 de minute, deci cu 3600 de secunde.
In practica navigatiei se opereaza cu valori de timp la precizie de minut (deci cu valori de timp exprimate in ore si minute). Exceptie face navigatia astronomica, unde se opereaza cu precizie de 0.5 secunde.
In general, in navigatie, valorile de timp se noteaza astfel:
12.43 ; 02.56 ; 00.00 ; 23.00
In navigatia astronomica, acestea se vor nota astfel :
13h29m05s ; 00h04m59s.5
6.4. UNITATI DE MASURA PENTRU VITEZA
In navigatie se opereaza frecvent cu urmatoarele unitati de masura pentru viteza:
NODUL (Nd) este viteza cu care o nava parcurge distanta de 1M in timp de o ora.
Deci :
1Nd = 1Mm/h (16)
In noduri se exprima viteza de deplasare a navei. Se mai opereaza cu urmatoarele unitati de masura ale vitezei :
cab/min este viteza cu care se parcurge distanta de 1cab in timp de un minut; se utilizeaza la exprimarea vitezei curentilor marini si uneori a vitezei navei;
m/s este viteza cu care se parcurge distanta de 1m in timp de o secunda; se utilizeaza la exprimarea vitezei vantului.
Foarte des, in aplicatiile de navigatie se pune problema convertirii vitezei dintr-o unitate de masura in alta. Pentru aceasta, se utilizeaza relatiile
1[Nd] = 1Mm/h = 10[cab] / 60[min] = 1/6 [cab/min] ;
1[Nd] = 1Mm/h = 1852[m]/3600[s] ≈ 1/2 [m/s].
In concluzie, pentru a transforma valoarea unei viteze din [Nd] in [cab/min] se imparte la 6, iar in [m/s] se imparte la 2.
Exemplu: Sa se transforme in [cab/min] si [m/s] urmatoarele valori de viteza:
1) 14 [Nd] ;
2) 17.5 [Nd].
Rezolvare
14 [Nd] = 14/6 [cab/min] = 2.3 [cab/min];
14 [Nd] = 14/2 [m/s] = 7 [m/s] ;
17.5 [Nd] = 17.5/6 [cab/min] = 2.9 [cab/min];
17.5 [Nd] = 17.5/2 [m/s] = 8.7 [m/s].
Cu ajutorul tablelor nr.10 (pag.43) si nr.11 (pag.48) din DH-90 se pot determina :
cu tabla 10, distanta in mile pe care nava a parcurs-o intr-un timp dat in minute cu o viteza data in noduri;
cu tabla 11, timpul in minute necesar unei nave care se deplaseaza cu o viteza data in noduri sa parcurga o distanta data in mile.
Exemplu: 1) Sa se determine ce distanta a parcurs o nava in timp de 42 min cu viteza de 13.5 Nd;
2) Sa se determine in cat timp o nava cu viteza v=15.5 Nd parcurge spatiul m = 34 Mm.
Rezolvare
Rezultatul corect este 9.4 M . Se intra la pagina 44 pe orizontala cu valoarea timpului si pe verticala cu valoarea vitezei. La intersectia lor se va identifica rezultatul corect.
Rezultatul corect este 131.6 min. Se intra la pag.48 pe orizontala cu valoarea vitezei iar pe verticala cu distanta descompusa m = 30 + 4. Se vor obtine valorile 116.1 min. si 15.5 min. care prin insumare vor da rezultatul corect.
7. PROIECTIA ELIPSOIDULUI PE SFERA TERESTRA
Consideram elipsoidul si sfera terestra concentrice, avand axele polilor si planele ecuatoriale comune (Fig. 14). Pe elipsoidul terestru se considera un punct A, avand longitudinea geodezica A si latitudinea geodezica A, verticala locului ZA confundandu-se cu normala la suprafata elipsoidului in punctul A.
Se adopta ca imagine a punctului A pe sfera terestra un punct A' care este continut in planul elipsei meridiane a locului A si a carei verticala Z'A' este paralela cu verticala locului A.
Acest mod de proiectare, facuta in scopul substituirii elipsoidului cu sfera terestra, necesara in navigatie, cartografie etc. prezinta urmatoarele proprietati:
axa polilor si planul ecuatorului sunt elemente de referinta comune, atat pentru elipsoid, cat si pentru sfera terestra;
meridianul punctului A de pe elipsoid si meridianul proiectiei acestui punct A' pe sfera terestra sunt continute in acelasi plan.
Fig. 14
Ca urmare, unghiurile diedre formate intre elipsele meridiane ale diferitelor puncte de pe elipsoid sunt egale cu unghiurile diedre ale meridianelor care contin proiectiile acestor puncte pe sfera terestra.
In consecinta, se pot conclude urmatoarele:
valoarea coordonatelor unui punct oarecare de pe Pamant se mentine aceeasi pe ambele suprafete de reprezentare, atat pe elipsoid; cat si pe sfera terestra;
pe elipsoidul terestru, lungimea arcului de meridian de 1' variaza intre 1 843 m la ecuator si 1861.6 m la poli. Lungimea arcului de meridian de 1', ca dealtfel a oricarui minut de arc de cerc mare pe sfera terestra, este constanta si are valoarea de 1852 m, ceea ce reprezinta lungimea arcului de meridian eliptic la latitudinea de aproximativ 45. Prin substituirea elipsoidului cu sfera, folosirea lungimii milei marine reprezentand lungimea de cerc mare de 1' nu afecteaza precizia navigatiei, diferentele fiind practic neglijabile.
unghiurile si distantele sunt usor deformate, cand se trece de pe elipsoid pe sfera si invers.
Aceste deformatii sunt insa practic neinsemnate, deoarece turtirea elipsoidului este mica. inlocuirea elipsoidului terestru prin sfera terestra poate determina erori maxime de :
11'6 pentru marimile unghiulare
1/200 din spatiu pentru marimile liniare;
Cele aratate mai sus justifica pe deplin utilizarea sferei terestre pentru reprezentarea globului pamantesc in rezolvarea problemelor de navigatie. In cartografie, unde se solicita o precizie superioara, se aplica de cele mai multe ori principiul dublei proiectii; acest principiu consta din proiectarea elipsoidului pe sfera, ceea ce da nastere la mici deformatii care se pot calcula, apoi se proiecteaza sfera pe un plan, in scopul intocmirii hartilor.
1. PLANE SI LINII PRINCIPALE ALE OBSERVATORULUI PE SFERA TERESTRA
In navigatia maritima, siguranta navigatiei este obiectivul caruia se subordoneaza toate activitatile de la bordul navei. In acest context, orientarea pe mare devine un element foarte important.
In mare deschisa, orientarea nu ar fi posibila fara existenta unui sistem de referinta.
In fig.15 s-a considerat observatorul A plasat pe suprafata sferei terestre la o latitudine nordica oarecare.
Sunt reprezentate:
PnPs , axa polilor terestri;
QQ', ecuatorul terestru;
ZeNa, verticala punctului A considerat;
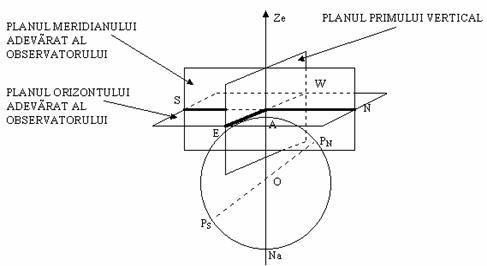
[ Fig.15 ] Plane si linii principale ale unui observator
Directia care uneste punctul observatorului cu centrul sferei terestre este verticala locului (AO); verticala locului este materializata de firul cu plumb, liber suspendat sub actiunea gravitatiei Pamantului.
Verticala locului prelungita la infinit inteapa sfera cereasca in doua puncte: zenitul (Ze), deasupra crestetului observatorului si nadirul (Na), in sens opus. De aceea, directia verticalei locului mai este denumita si linia zenit-nadir.
Planele care contin verticala locului se numesc plane verticale sau verticale. Verticalul care contine axa polilor terestri se numeste planul meridianului adevarat al observatorului(locului); intersectia acestui plan cu sfera terestra determina un cerc mare, denumit meridianul adevarat al observatorului (locului) sau meridianul observatorului (locului).
Planul verticalul perpendicular pe planul meridianului observatorului se numeste primul vertical. Orice plan perpendicular pe verticala locului se numeste orizont.
Planul orizontal care trece prin ochiul observatorului A se numeste orizont adevarat al observatorului.
Planul orizontal care trece prin centrul sferei terestre se numeste orizont astronomic (HH').
Dreapta de intersectie dintre planul meridianului observatorului cu planul orizontului adevarat al observatorului se numeste linia nord-sud (N-S). Sensul nordic al acestei linii este determinat de directia Polului Nord in raport cu pozitia observatorului.
Directia AN mai este denumita si directia nord adevarat, referindu-se la faptul ca este determinata de planul meridianului adevarat al observatorului; in acest caz, punctul cardinal nord este notat prin Na.
Dreapta de intersectie dintre planul orizontului adevarat al observatorului cu primul vertical se numeste linia est-vest (E-W). Sensurile estic si vestic ale acestei linii se stabilesc astfel: considerandu-ne in punctul A cu fata spre nord, sensul estic este spre dreapta, iar cel vestic spre stanga.
Liniile N-S si E-W se numesc linii sau directii cardinale.
Liniile cardinale sunt determinate in orice punct al sferei terestre, cu exceptia cazului cand observatorul se afla in unul din polii terestri. in acest caz verticala locului se confunda cu axa polilor terestri, astfel ca planul meridianului locului nu mai este un plan determinat. Planul meridianului locului fiind nedeterminat, inseamna ca nici liniile N-S si E-W nu mai pot fi stabilite in planul orizontului adevarat.
Liniile N-S si E-W impart orizontul adevarat al observatorului in patru cadrane. Denumirea fiecarui cadran are ca origine linia N-S si ca sens estul si vestul, deci:
cadranul I sau cadranul NE;
cadranul II sau cadranul SE;
cadranul III sau cadranul SW;
cadranul IV sau cadranul NW.
Liniile si planele definite mai sus sunt proprii pozitiei fiecarui observator pe sfera terestra.
2. DRUMURI SI RELEVMENTE
2.1. DRUM ADEVARAT
Orientarea pe mare presupune cunoasterea in permanenta a pozitiei navei si a directiei in care aceasta se deplaseaza; in acest context, se opereaza curent cu urmatoarele notiuni:
Directia Nord adevarat (Na) este semidreapta nordica a liniei NS, si este directia de referinta la care se raporteaza directia de deplasare a navei;
Reperele de navigatie sunt constructii special amenajate, cladiri importante usor de recunoscut de pe mare, forme de relief etc., trecute cu precizie in harta si consemnate in documentele nautice;
Directia de vizare la un reper este dreapta din
planul orizontului adevarat al observatorului, care uneste punctul
navei cu reperul.
[ Fig.16] [Fig. 17 ]
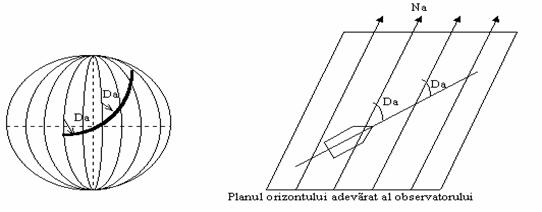
Directia in care se deplaseaza nava se defineste cu ajutorul notiunii de drum adevarat (fig.16 si 17):
Da al navei este unghiul din planul orizontului adevarat masurat de la directia Na pana la axa longitudinala a navei, directia catre prova.
2.2. RELEVMENT ADEVARAT
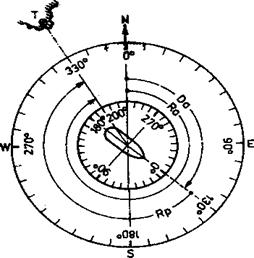
Relevmentul adevarat (Ra) masurat la un reper F (Fig.18) se defineste ca fiind unghiul din planul orizontului adevarat al observatorului, masurat de la directia Na pana la directia de vizare la reper.
Relevmentul adevarat este un al doilea indicator important pentru orientarea pe mare; el raporteaza directia de vizare la un reper la directia Na.
2.3. RELEVMENT PROVA
Relevmentul prova (Rp) masurat la reperul F (vezi Fig.18) este unghiul din planul orizontului adevarat al observatorului, masurat de la directia prova a axei longitudinale a navei pana la directia de vizare la reper.
Relevmentul prova raporteaza directia de vizare la un reper la axa longitudinala a navei, directia catre prova; el constituie al treilea indicator important pentru orientarea pe mare.
Da, Ra si Rp se exprima in grade si zecimi de grad.
 Fig.18 ] Drumuri si
relevmente
Fig.18 ] Drumuri si
relevmente
2.4. SISTEME DE MASURARE A DRUMURILOR SI RELEVMENTELOR IN PLANUL ORIZONTULUI ADEVARAT
Marimile unghiulare ale drumurilor si relevmentelor se exprima in grade sexagesimale. In trecut, in perioada velierelor, drumurile si relevmentele se exprimau in carturi.
In afara diferitelor unitati de masura in care se pot exprima drumurile si relevmentele, in navigatie se intalnesc mai multe sisteme de masurare a acestor unghiuri, privind originea lor de masurare.
In principiu, directiile/unghiurile masurate in planul orizontului adevarat al observatorului se raporteaza la directia Na. Prin exceptie, anumite unghiuri se pot masura fata de axa longitudinala a navei (cum este de exemplu relevmentul prova masurat la un reper).
Se definesc urmatoarele sisteme de masurare a unghiurilor in planul orizontului adevarat (POA) al observatorului:
1) Sistemul circular este sistemul care se utilizeaza in prezent, pe scara larga, in navigatia moderna. Toate celelalte sisteme de contare se folosesc restrictiv.
In sistem circular, unghiurile se masoara de la directia de referinta (Na sau prova), doar in sens retrograd, si iau valori de la 000 la 360
[ Fig 19 ] Sistemul circular de masurare a drumurilor si relevmentelor
Exemplu: Da = 130.0 ;
Ra = 330.0 ;
Rp = 200.0 .
Ca regula absolut generala, drumurile adevarate si relevmenetele adevarate se masoara de la directia Na, in timp ce relevmentele prova se masoara doar de la axul prova al navei.
ATENTIE
Da = 000.o atunci cand nava se deplaseaza pe acelasi meridian catre N;
cand nava se deplaseaza pe acelasi paralel catre E atunci Da = 090.o;
cand nava se deplaseaza pe acelasi meridian catre S, atunci Da = 180.o;
cand nava se deplaseaza pe acelasi paralel catre W, atunci Da = 270.o.
Cand drumul adevarat al navei se gaseste in limitele 000.o < Da < 090.o atunci se spune ca drumul navei se afla in cadranul I de orizont (sau NE);
Cand drumul adevarat al navei se gaseste in limitele 090.o < Da < 180.o, se spune ca drumul navei se gaseste in cadranul II (sau SE) de orizont.
Cand drumul adevarat al navei se gaseste intre limitele 180.o < Da < 270.o se spune ca drumul se gaseste in cadranul III de orizont;
Cand drumul adevarat al navei se gaseste intre limitele 270.o <Da < 360.o, se spune ca drumul se gaseste in cadranul IV (sau NW) de orizont.
Incadrarea valorilor de relevment adevarat masurate la repere in cele patru cadrane de orizont este analoga regulii date pentru drumul adevarat. Astfel:
daca un reper se gaseste pe acelasi meridian cu nava, catre nord fata de aceasta, atunci Ra = 000.o, iar
daca valoarea relevmentului adevarat masurat la un reper se gaseste in limitele 000.o < Ra < 090.o atunci reperul se va vedea in cadranul NE (cadranul I) de orizont.
Relevmentele prova se masoara in sistem circular, conform definitiei, de la axa longitudinala-prova in sens retrograd (deci prin tribord intotdeauna), putand lua valori de la 000 la 360 , modul de notare fiind:
Rp = 045 .o; Rp = 135 .o; Rp = 270 .o
2) Sistemul semicircular este utilizat la scara mai restransa in navigatia moderna. In acest sistem, directia de referinta pentru masurarea unghiurilor poate fi, optional, directia nord adevarat sau directia sud adevarat. De asemenea, unghiurile (drumuri, relevmente etc.) se pot masura atat in sens retrograd cat si in sens direct, luand valori de la 000.o la 180.o.
Relevmentul prova exprimat semicircular se masoara de la axa longitudinala a navei in sens retrograd (prin tribord) sau in sens direct (prin babord), functie de bordul in care se vede reperul. Astfel, relevmentele prova semicirculare sunt intotdeauna mai mici de 180 si poarta indicele Td sau Bd ( tribord sau babord ).
Exemplu : RpBd = 0855 .
RpTd = 0855
3) Sistemul cuadrantal. In acest sistem:
Unghiurile se exprima precizand cadranul de orizont in care acestea se gasesc.
Directia de referinta este nord adevarat (pentru unghiuri situate in cadranele I si IV) sau sud adevarat (pentru unghiuri cu valori in cadranele II si III);
sensul de masurare poate fi direct sau retrograd, iar valoarea unui unghi exprimat cuadrantal nu poate depasi 090 (valoarea unui cadran).
Exemplu: Da = NE 046.5 ;
Ra = NW 048.o .
ATENTIE: Relevmentele prova nu se exprima in sistem cuadrantal.
Relatiile generale intre drumuri si relevmente (exprimate circular) sunt:
Ra = Da + Rp
Da = Ra - Rp
Rp = Ra - Da
Aceste relatii nu mai sunt valabile pentru relevmente prova exprimate semicircular. In aceasta situatie, se recomanda sa se utilizeze urmatoarele relatii:
Ra = Da + RpTd = Da - RpBd
Da = Ra - RpTd = Ra + RpBd
RpTd = Ra - Da
RpBd = Da - Ra.
Drumurile si relevmentele exprimate in sistemul cuadrantal se transforma in sistem circular folosind urmatoarele relatii:
|
Da (Ra) in sistem cuadrantal |
Da (Ra) in sistem circular |
|
Da(Ra) NEn |
Da(Ra) n |
|
Da(Ra) = SEn |
Da(Ra)=l80 - n |
|
Da(Ra) = SWn |
Da(Ra) = 180 + n |
|
Da(Ra) = NWn |
Da(Ra) = 360 - n |
4) Impartirea orizontului in carturi este de asemenea un sistem demodat, specific epocii velierelor. In acea perioada, data fiind precizia scazuta de masurare a unghiurilor in planul orizontului adevarat (Da, Ra, Rp), se utilizau pentru precizarea acestora carturile. Cartul este unitatea de masura pentru unghiuri reprezentand a 32-a parte din orizont deci 360/32 = 1115' = 111/4.
Fiecare cart are o denumire proprie, asa cum rezulta din fig.20, precum si un numar de ordine propriu de la 0 la 8 incepand de la N catre E si W, respectiv de la S catre E si W.
Exprimarea directiei (drumului sau relevmentului) se facea fie prin denumirea cartului, fie prin precizarea cadranului de orizont si a numarului de ordine a cartului din cadranul respectiv de orizont.
Carturile principale sunt :
-carturile N, E, S, W : acestea indica directiile cardinale ;
carturile NE, SE, SW, NW : acestea indica directiile intercardinale;
carturile NNE, ENE, ESE, SSE, SSW, WSW, WNW, NNW : acestea indica directiile inter-intercardinale.
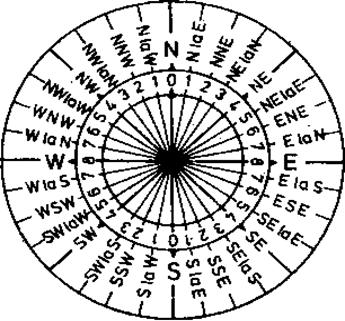
[ Fig.22 ] Impartirea orizontului in carturi
In prezent, sistemul de contare in carturi se mai utilizeaza doar pentru a indica, la precizie de cart inter-intercardinal, directia vantului. De asemenea, trebuie precizat ca sistemele semicircular si cuadrantal se mai utilizeaza in navigatia astronomica. De asemenea, relevmentele prova se exprima de regula semicircular, precizand bordul in care se vede reperul. In fig.22 este reprezentata schema de impartire a orizontului in carturi:
CURSUL 5
ORIZONTUL
1. ORIZONTUL GEOMETRIC
Definitia data planului orizontului adevarat al observatorului implica faptul ca acesta este infinit. Cu toate acestea, un observator A al carui ochi G se afla la inaltimea i fata de nivelul marii (vezi fig.23) vede orizontul sub forma de cerc, datorita sfericitatii Pamantului. Este deci necesar a se face distinctia intre notiunea de plan al orizontului adevarat si notiunea de orizont.
Se numeste orizont geometric locul geometric al punctelor de pe suprafata sferei terestre in care tangenta dusa din ochiul observatorului atinge suprafata acesteia. Orizontul geometric este deci un cerc mic ( BB', fig.23).
S-a notat cu d' distanta la orizontul geometric. Pentru calculul acestei distante, se aplica teorema lui Pitagora in triunghiul dreptunghic GBO :
![]()
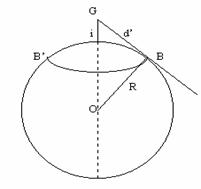
[ Fig.23 ] Orizontul geometric
Facand inlocuirile, rezulta:
![]()
Deoarece i2 << 2Ri , atunci:
![]()
In ultima relatie toate marimile din membrul drept sunt exprimate in [m].
Pentru a obtine pe d' in [Mm] , se exprima i si R in [Mm] si rezulta :
![]()
Deci : ![]()
relatie care da pe d' in [Mm], avand ca valoare de intrare pe i in [m].
2. ORIZONTUL VIZIBIL
Observatorul de la bordul navei, in conditiile existentei atmosferei terestre, vede un singur orizont - determinat de linia aparenta care separa marea de cer, denumit orizont vizibil sau orizontul marii.
Orizontul vizibil este situat mai departe decat orizontul geometric, datorita efectului refractiei terestre. Refractia terestra este fenomenul care cauzeaza devierea razei de lumina ce leaga doua puncte de la suprafata Pamantului, situate la altitudini diferite.
Pentru a explica elementele care definesc orizontul vizibil, in fig. 25 consideram observatorul A, in aceleasi conditii ca in fig. 23. Densitatea aerului in straturile inferioare ale atmosferei variaza invers proportional cu altitudinea; de aceea, o raza de lumina care pleaca din punctul D, aflat pe orizontului vizibil, trecand prin straturi atmosferice cu o densitate care scade cu altitudinea, este refractata si ajunge in ochiul observatorului A parcurgand o curba DA, denumita curba de refractie.
Fig 24. Refractia atmosferica
Curba de refractie DA (figura 25), are concavitatea spre Pamant si este continuta in planul vertical determinat de verticalele locului in punctele A' si D.
Observatorul considerat in A vede punctul D al orizontului marii pe directia AD', determinata de tangenta la curba de refractie in punctul A. curba de refractie avand concavitatea spre Pamant si fiind continuta in acelasi plan vertical, rezulta ca refractia terestra modifica numai inaltimea aparenta a obiectelor observate, fara a afecta relevmentele lor.
Unghiul format intre planul orizontului adevarat al observatorului (HH') si directia la orizontul vizibil (AD ) se numeste depresiunea orizontului vizibil (Depr.).
Refractia terestra este functie de diferenta de densitate a straturilor inferioare ale atmosferei; diferenta de densitate este dependenta in principal de temperatura, presiunea si umiditatea acestor straturi atmosferice. Orizontul vizibil se poate considera ca un cerc mic pe sfera terestra, in ipoteza ca refractia terestra este aceeasi pe intreg orizontul.
Figura 25. Orizontul vizibil
Repartitia orizontala neomogena a maselor de aer care constituie straturile inferioare ale atmosferei poate da nastere unei refractii terestre neuniforme, cu aparitia unei imagini frante sau deformate a liniei orizontului vizibil; fenomenul poarta denumirea de miraj, putand lua forme optice foarte diferite. De asemenea, o refractie anormala poate da nastere la fenomene surprinzatoare privind distanta la care sunt vizibile obiectele.
2.1 Determinarea distantei la orizontul vizibil
Pentru a face posibila determinarea cu exactitate a distantei la orizontul vizibil ar trebui sa se stabileasca cu rigurozitate traiectoria razei de lumina DA, adica a curbei de refractie terestra. Aceasta ar implica cunoasterea constitutiei atmosferei sau cel putin a legii variatiei densitatii, in diferitele ei straturi. Deoarece nu avem inca asemenea cunostinte despre atmosfera, studiul refractiei terestre si al efectelor ei nu se poate baza in prezent decat pe ipoteze.in consecinta, determinarea distantei d la orizontul vizibil se realizeaza prin stabilirea unei marimi aproximative, valabila pentru conditiile medii de refractie terestra, care se adauga la distanta d' la orizontul geometric.
Unghiul format intre tangentele la curba de refractie in punctele A si D, se numeste unghiul refractiei terestre (fig. 25). Marimea acestui unghi nu poate fi stabilita cu precizie din motivele aratate mai sus; marimea aproximativa a unghiului refractiei terestre ( ) se determina pe baza unor reguli stabilite experimental, care se verifica cu suficienta precizie numai pentru distante relativ mici, de ordinul a cateva mile marine, la diferente de altitudine pana la 25-30 m si numai in conditii atmosferice normale, care genereaza conditii medii de refractie terestra.
Aceste reguli, denumite legile refractiei terestre, sunt urmatoarele:
curba de refractie terestra AD se asimileaza cu un arc de cerc. Se admite deci ca triunghiul ADE este isoscel, iar unghiurile formate in A si D sunt egale. Notand acest unghi cu α, el se afla cu in urmatoarea relatie:
motiv pentru care este numit semiunghiul refractiei terestre;
unghiul refractiei terestre (ρ) este proportional cu unghiul β la centrul sferei terestre format intre verticalele punctelor A si D, respectand urmatoarea relatie:
ρ=k β sau ρ=2γ β
Coeficientul γ este numit coeficientul refractiei tereste , valoarea lui variind intre 0.04 si 0.15-in functie de conditiile atmosferice. Pentru o stare atmosferica normala, care genereaza conditii medii de refractie terestra, se considera cu valoarea sa medie de 0.08
Din relatiile de mai sus se observa ca semiunghiul refractiei terestre poate fi exprimat de egalitatea:
Distanta la orizontul vizibil (d) se considera mai mare decat distanta la orizontul geometric (d') cu o marime in functie de semiunghiul refractiei terestre (α):
d = d'+
Pentru precizia necesara calculului, masura unghiului β in minute de arc poate fi considerata egala cu distanta d ' la orizontul geometric exprimata in mile marine.
Deci:
d = d'+ γ d'=d(l+ γ)=l.08d'
Cunoscand formula de determinare a distantei la orizontul geometric obtinem:
Avand in vedere relatia care exprima pe d', obtinem;

relatie care se utilizeaza pentru calculul distantei la orizontul vizibil in mile marine functie de inaltimea ochiului observatorului in metri.
Distanta la orizontul vizibil se poate determina expeditiv si cu tabla nr.5a, pag.31, DH-90. Se intra pe coloana din stanga cu valoarea inaltimii ochiului in metri iar valoarea distantei la orizontul vizibil in mile marine se determina corespunzator pe coloana din dreapta.
Formula de calcul a distantei la orizontul vizibil este rezolvata si de tabla "Distance of sea horizon in nautical miles ' din Brown's Nautical Almanac(dar inaltimea ochului observatorului este exprimata in picioare).
d [Mm] 1,15![]()
La bordul navelor maritime de transport, a caror linie de plutire are variatii considerabile in functie de starea de incarcare, se impune a se stabili si afisa in camera hartilor - inaltimea puntii de comanda si a puntii etalon, de unde se fac observatiile in navigatie deasupra liniei de plutire, la diferite pescaje; pentru a stabili inaltimea ochiului observatorului deasupra nivelului marii, ramane ca navigatorul sa adauge inaltimea proprie la inaltimea puntii de observatie deasupra liniei de plutire
Exemplu: Sa se determine cu tabla 5a DH-90 valoarea distantei la orizontul vizibil pentru
1) i = 7m ;
2) i = 53 m .
Rezolvare
1) d = 5.5 Mm . (se intra pe coloana din stanga cu i=7m si corespunzator pe coloana din dreapta se va gasi valoarea 5.5);
2) d = 15.1 Mm .(valoarea i=53m nu exista in tabla, si ca urmare valoarea lui d se va interpola dupa urmatoarea schema):
i = 52 ----> d = 15
i = 53 ----> x
i = 54 ----> d = 15.3 ===>x = d = 15.15 Mm.
OBSERVATIE: Distanta la orizontul vizibil nu constituie linie de pozitie in navigatie, sau, cu alte cuvinte, cu valoarea lui d nu se determina pozitia navei. Calculul valorii distantei la orizontul vizibil nu are un suport de precizie necesar acestui lucru datorita faptului ca ea depinde de parametrii atmosferici instantanei. Distanta la orizontul vizibil are doar un rol orientativ pentru navigator.
Distanta la orizontul vizibil se poate determina expeditiv si cu tabla nr.5a, pag.31, DH-90. Se intra pe coloana din stanga cu valoarea inaltimii ochiului in metri iar valoarea distantei la orizontul vizibil in mile marine se determina corespunzator pe coloana din dreapta.
Exemplu: Sa se determine cu tabla 5a DH-90 valoarea distantei la orizontul vizibil pentru
1) i = 7m ;
2) i = 53 m .
Rezolvare
1) d = 5.5 Mm . (se intra pe coloana din stanga cu i=7m si corespunzator pe coloana din dreapta se va gasi valoarea 5.5);
2) d = 15.1 Mm .(valoarea i=53m nu exista in tabla, si ca urmare valoarea lui d se va interpola dupa urmatoarea schema):
i = 52 ----> d = 15
i = 53 ----> x
i = 54 ----> d = 15.3 ===>x = d = 15.15 Mm.
OBSERVATIE: Distanta la orizontul vizibil nu constituie linie de pozitie in navigatie, sau, cu alte cuvinte, cu valoarea lui d nu se determina pozitia navei. Calculul valorii distantei la orizontul vizibil nu are un suport de precizie necesar acestui lucru datorita faptului ca ea depinde de parametrii atmosferici instantanei. Distanta la orizontul vizibil are doar un rol orientativ pentru navigator.
3. ORIZONTUL DE RADIOLOCATIE
Determinarea distantei la orizontul de radiolocatie prezinta de asemenea o importanta deosebita pentru navigator, valoarea acesteia reprezentand o informatie pretioasa in legatura cu cele mai indepartate puncte de la care radiolocatorul mai primeste semnal ecou.
Distanta la orizontul de radiolocatie depinde de inaltimea antenei de radiolocatie (h), iar coeficientul ce intra in calcul s-a determinat plecand de la aceleasi premize ca si in cazul distantei la orizontul vizibil. Coeficientul de refractie (t) este dublu pentru undele electromagnetice cu lungimi de unda radar (centimetrice). Ca urmare, relatia de calcul a distantei la orizontul de radiolocatie este:
dr [Mm] = 1.93(1+0.15)![]() =
2.224
=
2.224![]()
Relatia este evident aproximativa, valoarea reala depinzand de parametrii atmosferici si tehnici. Pentru calcule expeditive se recomanda utilizarea tablei nr.5b pag.31 DH-90; modul de lucru este acelasi ca la paragraful precedent.
4. DISTANTA LA CARE UN OBIECT APARE LA LINIA ORIZONTULUI
In fig.26 este reprezentata o nava care se deplaseaza catre reperul de inaltime H . Ochiul observatorului de pe puntea de comanda a navei are inaltimea i.
Este evident ca distanta la care reperul va apare la linia orizontului, si care se noteaza cu DT va fi suma distantelor la orizontul vizibil calculate pentru reper (dH) si pentru observator (di):
DT =
dH + di = 2.08![]() +
2.08
+
2.08![]() =
2.08
=
2.08![]() .
.
Relatia este valabila pe timp de noapte, cand lumina farurilor se distinge relativ usor la linia orizontului. Pe timpul zilei insa, este necesar ca nava sa parcurga un spatiu suplimentar pentru ca varful reperului sa se distinga la linia orizontului. Se considera ca distanta la care apare reperul la lina orizontului pe timpul zilei este mai mica decat cea calculata pentru perioada de intuneric cu cca. 2%. Rezulta ca relatia de calcul va fi :
[Fig.26]
Distanta la care apare un obiect la linia orizontului
DT =
2.04(![]() )
)
Pentru determinarea rapida a distantei la care un obiect apare la linia orizontului, se recomanda a se utiliza tabla nr.6 pag.32 DH-90. Se arata mai jos modul de utilizare al tablei pe un exemplu practic:
Exemplu: Sa se determine distanta la care un reper de inaltime H=75m apare la linia orizontului pentru un observator cu i = 12m .
Rezolvare : DT = 25.2 Mm ; Pentru determinarea lui DT se intra la pag.32 in tabelul din partea de jos a paginii pe coloana i=12 si, datorita faptului ca valoarea H=75m nu se gaseste in tabla, se va face urmatoarea interpolare simpla :
pentru i=12 si H= 70m .DT = 24.6 Mm
H= 75m .x
H= 80m .DT = 25.8 Mm
Rezulta ca x = DT = 25.2 M.
Acelasi rezultat se obtine daca se face interpolarea cu ajutorul tablei 62 din DH-90, tabla 'Parti proportionale'.
Mai trebuie precizat ca pe hartile marine, alaturi de reperele de navigatie sunt trecute si caracteristicile acestora, intre care si distanta in [Mm] la care lumina acestora apare la linia orizontului in ochiul unui observator cu inaltimea de 5m; aceasta valoare se numeste bataie geografica a farului si se noteaza cu Dharta. Relatia de calcul a DT, utilizand valoarea bataii geografice data in harta este:
DT [Mm]
= Dharta [Mm] - 4.7 [Mm] + 2,08![]() .
.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3339
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved