| CATEGORII DOCUMENTE |
| Astronomie | Biofizica | Biologie | Botanica | Carti | Chimie | Copii |
| Educatie civica | Fabule ghicitori | Fizica | Gramatica | Joc | Literatura romana | Logica |
| Matematica | Poezii | Psihologie psihiatrie | Sociologie |
MATEMATICA APLICATA IN INFORMATICA
PROBLEME DE OPTIMIZARE CONVEXA
1.Notiuni introductive
1.1.Metode Lagrange
Fie P(b) o problema de optimizare:
Minimizarea f(x), pentru h(x)=b,
![]() .
.
Fie ![]() Spunem ca x este realizabil daca
Spunem ca x este realizabil daca ![]() .
.
Definim operatorul Lagrange ca:
![]()
Tipic, ![]() cu
cu ![]() unde
unde
![]() este numit multiplicator Lagrange
este numit multiplicator Lagrange
Teorema 1.1. Teorema de suficienta Lagrange
Daca ![]() este
realizabil pentru P(b) si exista
este
realizabil pentru P(b) si exista ![]() astfel
incat
astfel
incat
Pentru ![]() ,
,
![]() atunci
atunci ![]() este
optim pentru P(b).
este
optim pentru P(b).
Demonstratie:
Pentru toti ![]() si
si
![]() avem
avem
![]()
Acum daca ![]() si
prin presupunere
si
prin presupunere
![]() pentru toti
pentru toti ![]() .
.
Atunci x este optim pentru problema de optimizare P(b).
Exemplu: Minimul ![]() pentru
pentru ![]() cu
cu ![]() .
.
Aici ![]() .
Consideram problema:
.
Consideram problema:
Minimizarea [![]() ]
]
Aceasta are un punct in care ![]()
Acum alegem ![]() astfel incat
astfel incat ![]() .
Aceasta se intampla
.
Aceasta se intampla ![]()
Astfel avem minimul deoarece ![]()
Cu aceasta valoare a lui ![]() ,
conditiile de suficienta Lagrange sunt satisfacute si valoarea optima este
,
conditiile de suficienta Lagrange sunt satisfacute si valoarea optima este ![]() la
la ![]()
1.2.Problema duala
Definim:
![]() pentru
pentru ![]() si
si ![]()
Atunci pentru toate ![]()
![]()
Deci ![]() este
margine inferioara pe
este
margine inferioara pe ![]() deci o margine inferioara pe solutia din P(b).
deci o margine inferioara pe solutia din P(b).
Dorim sa maximizam aceasta margine inferioara pentru care ![]() .
.
Aceasta constituie problema duala, definite ca:
Maximizarea ![]() ,
pentru
,
pentru ![]() ,
pentru
,
pentru ![]()
1.3.Hiperplane
Un hiperplan ![]() este dat de:
este dat de:
![]()
Exista o intersectie
in ![]() cu axa verticala prin b si are panta
cu axa verticala prin b si are panta ![]() .
.
Consideram urmatoarea
modalitate de cautare a ![]()
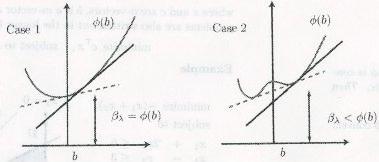
Metodele Lagrange functioneaza pentru cazul a. din cauza existentei unei
tangente ![]() la b.
la b.
Sa definim un
hiperplan ![]() in b astfel:
in b astfel:
![]() , unde
, unde ![]() pentru toate
pentru toate ![]() .
.
De fapt, ![]() .
Pentru a demonstra aceasta, folosim:
.
Pentru a demonstra aceasta, folosim:

Deci avem
problema duala sub forma max![]() .
.
2.Programarea Lineara
2.1.Convexitate si metode Lagrange
Definitii:
![]()
![]()
![]() , pentru valori
, pentru valori ![]() si 0<
si 0<![]() <1
atunci x=y=z.
<1
atunci x=y=z.
Teorema 2.1 (Suport pentru hiperplane)
Presupunem ![]() este convex si b se afla in interiorul setului
de puncte unde
este convex si b se afla in interiorul setului
de puncte unde ![]() este finit. Atunci exista un hiperplan de sustinere
(care nu este vertical) la
este finit. Atunci exista un hiperplan de sustinere
(care nu este vertical) la ![]() in b.
in b.
Ne intereseaza conditiile
problemei care fac ![]() convex.
convex.
Teorema 2.2. Considerand problema P(b), definite ca
![]() pentru
pentru ![]()
Daca X este un
set convex si f si h sunt convexe atunci si ![]() este convex.
este convex.
Demonstratie:
Luam ![]() si
si ![]() ,
pentru 0<
,
pentru 0<![]() <1
cu
<1
cu ![]() in asa fel incat
in asa fel incat ![]() este definit.
este definit.
Luam ![]() realizabil pentru P(
realizabil pentru P(![]() )
pentru i=1,2 si consideram
)
pentru i=1,2 si consideram ![]()
Atunci X convex, ![]() implica ca
implica ca ![]() .
De asemenea, h convex implica
.
De asemenea, h convex implica
![]()
Daca x este realizabil pentru P(b) si f convex
![]()
Aceasta e valabil
pentru toti ![]() si
si![]() asa ca minimul reprezinta:
asa ca minimul reprezinta:
![]() asa
ca
asa
ca ![]() este convex.
este convex.
2.2. Programe Lineare
Vom studia probleme de forma
minimizarea![]() unde x si c sunt vectori cu n elemente si b este un vector cu m elemente. A
este o matrice mxn.
unde x si c sunt vectori cu n elemente si b este un vector cu m elemente. A
este o matrice mxn.
Un exemplu de problema in programarea lineara este problema dietei.
Se dau n alimente
![]() ,
care contin fiecare m substante nutritive
,
care contin fiecare m substante nutritive ![]()
Atunci ![]() este continutul din substanta
este continutul din substanta ![]() in alimentul
in alimentul ![]()
![]() reprezinta meniul,
reprezinta meniul, ![]() cantitate din alimentul
cantitate din alimentul ![]() ,
pentru j=1,n
,
pentru j=1,n
![]() reprezinta minimul din substanta nutritive
reprezinta minimul din substanta nutritive ![]() pe care dorim sa o aiba meniul.
pe care dorim sa o aiba meniul.
![]() este pretul unitar
este pretul unitar
Problema lineara este determinarea unui meniu care sa respecte necesarul de substante nutritive si sa minimizeze cheltuiala, adica:
![]() , pentru i=1,n si
, pentru i=1,n si
Minimizarea ![]() ,
pentru i=1,n
,
pentru i=1,n
Varianta duala a problemei lineara este cea a farmacistului care are ![]() substante concentrate si trebuie sa stabileasca
preturi unitare
substante concentrate si trebuie sa stabileasca
preturi unitare ![]() ,
astfel incat castigul lui sa fie maxim iar cheltuiala comparatorului sa nu
depaseasca costul variantei cu meniul de alimente. Adica:
,
astfel incat castigul lui sa fie maxim iar cheltuiala comparatorului sa nu
depaseasca costul variantei cu meniul de alimente. Adica:
![]() , pentru j=1,n si
, pentru j=1,n si
Maximizarea ![]()
In acest sens rezulta teoremele de dualitate.
Notam cu P, multimea solutiilor posibile a problemei lineare
Si ![]() ,
multimea solutiilor posibile pentru problema lineara duala
,
multimea solutiilor posibile pentru problema lineara duala
![]()
![]()
Teorema 2.2.1. ![]()
Teorema 2.2.2.
a)
Daca
P este multime vida atunci functia obiectiv pentru ![]() este nemarginita superior cand
este nemarginita superior cand ![]() este nevida.
este nevida.
b)
Daca ![]() este multime vida, atunci functia obiectiv
pentru P este nemarginita inferior cand P este nevida
este multime vida, atunci functia obiectiv
pentru P este nemarginita inferior cand P este nevida
Pe baza teoriilor
de dualitate, algoritmul simplex permite rezolvarea problemelor P si ![]() .
.
3.Algoritmul Simplex
Se reduce la urmatorii pasi:
3.1.Punctul de vedere algebric
O baza B, este un vector de m variabile, diferite de 0.
Pentru orice x care satisface Ax=b, putem scrie:
![]() ,
unde
,
unde ![]() este o matrice mxm si
este o matrice mxm si ![]() este o matrice mx(n-m)
este o matrice mx(n-m)
![]() si
b sunt vectori de marime m si
si
b sunt vectori de marime m si ![]() este un vector de marime (n-m).
este un vector de marime (n-m).
O solutie de baza
are ![]() =0,
=0,
![]() ,
iar o solutie de baza realizabila are
,
iar o solutie de baza realizabila are ![]() =0,
=0,
![]() si
si ![]() .
.
Asa cum am vazut, daca exista un optim finit, atunci exista si o solutie de baza realizabila care este optima.
3.2.Tabelul Simplex
Pentru orice x cu
Ax=b, avem ![]() .
.
Deci: f(x)=![]()
Acestea se pot grupa intr-un tabel:
|
Baza |
Non-baza | |
|
I |
|
|
|
|
|
3.3.Testarea optimului
Sa presupunem ca
vrem sa maximizam ![]() si gasim
si gasim
![]() si
si ![]()
Atunci pentru toti
x, realizabil (![]() )
)
![]()
Dar pentru un ![]() de baza realizabil,
de baza realizabil, ![]() si
si ![]() avem
avem 
Deci ![]() este optim, oferind astfel posibilitatea verificarii
ca o solutie de baza, realizabila este optima.
este optim, oferind astfel posibilitatea verificarii
ca o solutie de baza, realizabila este optima.
3.4.Alegerea unei noi solutii
Alternativ, daca ![]() este pozitiv, atunci putem mari valoarea functiei
obiectiv, prin marirea valorii
este pozitiv, atunci putem mari valoarea functiei
obiectiv, prin marirea valorii ![]() .
.
Se doreste marirea
lui ![]() cu cat mai mult posibil, dar cu satisfacerea conditiilor.
Daca modificam marimea lui
cu cat mai mult posibil, dar cu satisfacerea conditiilor.
Daca modificam marimea lui ![]() ,
atunci si celelalte variabile se modifica si trebuie sa ne oprim daca una
devine 0.
,
atunci si celelalte variabile se modifica si trebuie sa ne oprim daca una
devine 0.
3.5.Algoritmul Simplex
I. Gaseste o solutie initiala realizabila cu baza B
II.Verifica
semnul ![]() ,
pentru
,
pentru ![]() Toate elementele sunt pozitive?
Toate elementele sunt pozitive?
III.Daca DA, atunci avem un optim. Stop.
IV.Daca NU, prin urmarirea
conditiei ![]() >0,
cu
>0,
cu ![]() ,
marim
,
marim ![]() pe cat posibil.
pe cat posibil.
Aceasta marirea poate fi infinita, ceea ce inseamna ca maximul nu poate fi atins. Stop
Sau, o variabila ![]() devine 0, ceea ce da o noua solutie
realizabila. Atunci se repeta incepand de la pasul II.
devine 0, ceea ce da o noua solutie
realizabila. Atunci se repeta incepand de la pasul II.
Sub forma de tabel avem:
|
|
|
|
|
|
Atunci constrangerile
sunt: ![]()
Ceea ce se poate
scrie ca Ax+z=b, ![]()
Si sa luam solutia
initiala realizabila x=0, z=b![]()
Ne putem gandi ca o extindere a lui x la (x,z) si sa setam
![]()
Pas1.Alegerea unei variabile ca baza
Cautam un j
astfel incat ![]() >0.
Coloana j este numita coloana pivot si variabila corespunzatoare coloanei j ca
forma baza. Daca
>0.
Coloana j este numita coloana pivot si variabila corespunzatoare coloanei j ca
forma baza. Daca ![]() pentru toti
pentru toti ![]() atunci solutia curenta este cea optima.
atunci solutia curenta este cea optima.
Daca exista mai
multe ![]() >0
vom alege una. O regula comuna este alegerea lui j pentru care
>0
vom alege una. O regula comuna este alegerea lui j pentru care ![]() are valoarea pozitiva cea mai mare.
are valoarea pozitiva cea mai mare.
Pas2.Cautarea unei variabile care sa fie eliminate din baza
Alegem i care minimizeaza
![]() /
/![]() din setul de valori pozitive
din setul de valori pozitive ![]() >0.
Randul i se numeste rand pivot. Daca
>0.
Randul i se numeste rand pivot. Daca ![]() pentru
toti i, atunci problema nu este marginita, iar functia obiectiv poate fi
crescuta fara limita.
pentru
toti i, atunci problema nu este marginita, iar functia obiectiv poate fi
crescuta fara limita.
In exemplu de mai jos avem in acest punct:
|
|
|
|
|
|
2 1 0 |
|
|
|
-1 0 1 | |
|
|
1 0 0 |
Pas3.Pivotarea elementului ![]()
Scopul este de a aduce ecuatiile intr-o forma apropiata pentru o noua solutie de baza, realizabila.
- Inmultim randul
i cu 1/![]() .
.
- Adunam ![]() rand(i)
la fiecare rand
rand(i)
la fiecare rand ![]() ,
inclusiv randul functiei obiectiv
,
inclusiv randul functiei obiectiv
Noua forma a tabelului este:
|
|
|
|
|
|
3 1 -1 | |
|
| ||
|
|
2 0 -1 |
Acum ne intoarcem iar de la Pasul 1.
In exemplul nostru, urmatoarea iteratie ne aduce valoarea optima.
|
|
|
|
|
|
1 | |
|
|
0 | |
|
|
0 |
Aceasta
corespunde solutiei ![]() .
.
3.6. Algoritmul Simplex Dual
Consideram problema de programare lineara definite in sectiunea 2.2., definite ca:
Minimizarea ![]() cu duala
cu duala
Maximizarea ![]()
La fiecare pas a algoritmului simplex avem urmatorul table:
|
Baza, |
Non-baza, | |
|
I |
|
|
|
|
|
|
Acum avem o solutie
de baza, realizabila pentru problema lineara primara ![]() si
si
O solutie de baza
(nu neaparat realizabila) pentru varianta duala ![]() .
.
Pentru exemplul urmator
dorim sa minimizam ![]() pentru
pentru
Se observa ca ![]() ,
pentru toti i. Fie variabilele
,
pentru toti i. Fie variabilele ![]() astfel incat sa obtinem:
astfel incat sa obtinem:
Algoritmul in
cazul problemei lineare primare trebuie sa foloseasca doua faze, de vreme ce ![]() ,
nu este o solutie realizabila. Insa tabelul contine o solutie pentru problema
lineara duala:
,
nu este o solutie realizabila. Insa tabelul contine o solutie pentru problema
lineara duala: ![]() si
si ![]() .
.
|
-2 -1 1 0 | |
|
3 4 0 0 |
|
Pentru liniile i
cu ![]() <0
alegem o coloana cu
<0
alegem o coloana cu ![]() <0
pentru a minimiza
<0
pentru a minimiza ![]() /-
/-![]() .
Pivotand pe
.
Pivotand pe ![]() avem:
avem:
|
| |
Si apoi pe ![]()
|
1 1 0 2 |
|
|
0 3 |
|
Deci valoarea
optima este ![]() ,
cu
,
cu ![]()
Probleme de forma
![]() pot fi scrise astfel:
pot fi scrise astfel:
Ax-z=b cu ![]()
![]()
Rezulta:
![]()
Deci variabilele
duale ![]() pot fi gasite in randul functiei obiectiv in
cadrul tabelului de optim (exemplu
pot fi gasite in randul functiei obiectiv in
cadrul tabelului de optim (exemplu ![]() )
)
4.Complexitatea Algoritmilor
4.1. Teoria complexitatii algoritmilor
O instanta a unei probleme de optimizare este definite prin datele de intrare. De exemplu, o instanta a unei probleme de programare lineara cu n variabile si m constangeri este definite de parametrii de intrare c,A si b. Sunt mxn+m+n numere si daca toate pot fi exprimate in cel mult k biti, atunci instanta poate di descrisa intr-un sir de (mxn+m+n)k biti. Aceasta este marimea instantei.
O problema de optimizare este rezolvata printr-un algoritm, in genului unui set de instructiuni. Timpul de rulare a algoritmului depinde de programare si viteza hardware. O instanta mare, cum ar fi o problema lineara poate fi rezolvata usor, daca A=I. Insa, timpul de rulare a unui algoritm creste cu marimea instantei.
Ignorand detaliile de implementare , timpul de rulare depinde de numarul de operatii implicate.
De exemplu, un sistem linear Ax=b, cu A de marime nxn, poate fi rezolvat de
catre algoritmul de eliminare Gaussian, folosind ![]() operatii de adunare, scadere, inmultire si impartire.
operatii de adunare, scadere, inmultire si impartire.
Bineinteles ca inmultirea este mai dificila decat adunarea si necesita mai mult timp de calcul, deci mai multe instructiuni elementare. Fie T(n) cel mai rau caz de rulare a unui algoritm pe toate instantele de marime n. T(n) este cateodata polinomial in marimea problemei
![]() pentru toate n, pentru un polinom (ex.
pentru toate n, pentru un polinom (ex. ![]() sau
sau ![]() ).
).
Algoritmul se spune ca ruleaza in timp polinomial.
Probleme P si NP
Spunem ca o problema, care ia forma unei intrebari cu raspuns tip Da/Nu, apartine lui P, daca poate fi rezolvata de un algoritm care ruleaza in timp polinomial.
Spunem ca o problema apartine lui NP, daca fiecare instanta Da, are un certificate, a carei validitate poate fi verificata in timp polinomial.
NP reprezinta nondeterministic polinomial, adica un polinomial nedeterminist. O problema de decizie apartine lui NP, daca poate fi rezolvata pe un calculator nedeterminist. Un calculator nedeterminist consta dintr-un numar exponential de calculatoare care lucreaza in paralel, oricare dintre ele poate raspunde Da, intr-un timp polinomial, fara a se consulta cu celelalte.
Putem vorbi de cele mai grele probleme in NP. O problema ![]() este grea in NP, daca fiecare problema din NP
poate fi redusa la ea. Se spune ca este completa NP, daca
este grea in NP, daca fiecare problema din NP
poate fi redusa la ea. Se spune ca este completa NP, daca ![]() .
Deci, toate probleme NP complete poate fi redusa una la alta si sunt la fel de
grele ca orice problema in NP.
.
Deci, toate probleme NP complete poate fi redusa una la alta si sunt la fel de
grele ca orice problema in NP.
Sunt multe probleme NP complete. O problema lineara este NP completa , daca toate variabilele sunt restranse la 0 sau 1. Problema comisului voiajor este NP completa, la fel si determinarea lanturilor hamiltoniene in grafuri.
5.Complexitatea computationala a problemei lineare
5.1.Timpul de rulare a unui algoritm simplex
Cel mai rau caz de rulare
Algoritmul simplex trece de la o solutie de baza realizabila, la alta, de fiecare data imbunatatind valoarea functiei obiectiv. Din pacate, poate necesita un numar exponential destul de mare de pasi pentru a termina.
Presupunem ca o
regiune realizabila este un cub in ![]() definit de constangerile:
definit de constangerile:
![]() cu i=1,.,d
cu i=1,.,d
Cautam sa maximizam ![]() Sunt
Sunt
![]() noduri. Drumul de mai jos viziteaza toate
nodurile inainte de a termina la (0,0,.,1).
noduri. Drumul de mai jos viziteaza toate
nodurile inainte de a termina la (0,0,.,1).
d=2 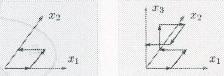 d=3
d=3
Fie dat ![]() atunci cubul dat de constrangerile:
atunci cubul dat de constrangerile:
![]() cu
i=2,.,d
cu
i=2,.,d
Se poate verifica ca, costul functiei creste cu fiecare miscare de-a lungul drumului. De exemplu, pentru d=2 avem:
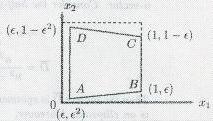
Observam ca ![]() creste pe secventa ABCD. Asa ca daca regula de
pivotare este sa ne mutam la solutia adiacenta realizabila, pentru care cresterea
functiei obiectiv este mica, atunci algoritmul simplex va avea nevoie de
creste pe secventa ABCD. Asa ca daca regula de
pivotare este sa ne mutam la solutia adiacenta realizabila, pentru care cresterea
functiei obiectiv este mica, atunci algoritmul simplex va avea nevoie de ![]() -1
pasi de pivotare inainte de terminare.
-1
pasi de pivotare inainte de terminare.
Cu aceasta regula de pivotare, algoritmul simplex prezinta o complexitate exponentiala maxima. Se observa ca nodul initial sic el final sunt adiacente si o regula diferita de pivotare poate reusi intr-un singur pas. Oricum, pentru toate regulile comune de pivotare, exista instante pentru care numarul de pasi este exponential. Nu se stie daca exista o regula de pivotare care sa faca algoritmul simplex mai eficient.
5.2. Complexitatea Problemei LP
Vom investiga algoritmi alternative pentru rezolvarea problemei de programare lineare. In particular, cautam un algoritm polinomial.
Marimea unei instante LP
Orice intreg r,
cu ![]() poate fi scris in forma binara
poate fi scris in forma binara
![]() unde
unde ![]() sunt 0 sau 1.
sunt 0 sau 1.
Numarul k poate fi maxim ![]() Folosind inca un bit pentru semn, putem
reprezenta orice intreg r unde
Folosind inca un bit pentru semn, putem
reprezenta orice intreg r unde ![]() prin maxim
prin maxim ![]() biti.
biti.
O instanta a problemei LP este data de o matrice A mxn, un vector b de marime m si un vector c de marime n. Atunci marimea instantei LP are marimea in biti de:
(mn+m+n)( ![]() ).
).
6.Concluzii
6.1.Optimizarea convexa
O problema de optimizare convexa este una de forma:
Minimizarea ![]() pentru
pentru ![]() ,
cu i=1.m
,
cu i=1.m
Unde functiile ![]() sunt convexe, adica satisfac:
sunt convexe, adica satisfac:
![]() pentru toti
pentru toti ![]() si
si ![]() ,
,
![]() .
.
Problema de programare lineara este un caz special a problemei de optimizare convexa.
6.2.Rezolvarea problemelor de optimizare convexa
Nu exista in general o formula analitica pentru solutia problemelor de optimizare convexa, dar ca si in cazul problemei de programare lineara, exista metode eficiente pentru rezolvarea lor.
Metodele punctelor interioare merg foarte bine in practica si in cateva cazuri rezolva problema cu o acuratete destul de buna, intr-un numar de operatii care nu depasesc dimensiunea polinomiala.
Am vazut ca se poate rezolva o problema intr-un numar de pasi care variaza de obicei de la 2 la 100.
Folosirea optimizarii convexe, este din punct de vedere conceptual, similara cu rezolvarea problemei celor mai mici patrate sau a problemei de programare lineara.
Insa recunoasterea unei probleme de optimizare convexa este destul de dificil.
Pe langa aceasta, exista trucuri in transformarea unei probleme convexe.
Recunoasterea unei probleme de optimizare convexa sau una care poate fi transformata intr-o problema convexa este o provocare.
Exista o varietate de aplicatii ale optimizarii convexe, in domenii precum probabilitatea si statistica, geometria de calcul si ajustarea de date.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3563
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved