| CATEGORII DOCUMENTE |
| Bulgara | Ceha slovaca | Croata | Engleza | Estona | Finlandeza | Franceza |
| Germana | Italiana | Letona | Lituaniana | Maghiara | Olandeza | Poloneza |
| Sarba | Slovena | Spaniola | Suedeza | Turca | Ucraineana |
Distributed Architecture for Interfacing Quartz Dual Mode Sensors
Abstract This paper presents a microprocessor-based distributed system architecture designed to interconnect piezoelectric resonant sensors to a measurement and control unit. Previously, a temperature compensated force sensor was designed and prototyped, featuring thickness-shear dual mode operation driven by several pairs of electrodes, as seen in published article [1]. The starting idea to design the resonator was to optimize a particular electrodes shape that could allow dual mode excitation by electrically isolated electronic oscillators. This approach greatly simplified the electronics, knowing that dual mode operation with classical electrodes requires elaborate schematics for signal mixing and filtering to finally discriminate the vibrating mode frequencies. In our case, since the signals are already separated, only a minimal attention was paid to design of electronic oscillators, the rest of the work being devoted to frequency counting and information processing. The present paper continues the work and focuses on the electronic schematic necessary for extracting the useful output data from raw frequency values.
INTRODUCTION ON RESONATOR FEATURES
The force sensitive element is a plano-convex disk-shaped thickness-shear resonator manufactured in quartz. The diameter of the plate is 13.2 mm, the curvature radius of the convex side is 300mm while the thickness of the plate is 0.7 mm. The quartz crystal had an SC-cut [2]. Electrodes were made by vacuum deposition of gold over a chrome layer followed by photolithography. Resulted plates were tested extensively [1] under different force and temperature conditions. The design of electrodes is not a subject of the paper, although it should be stressed out that a good concordance was found between analytical simulation of vibrating amplitude distribution and experimental X-rays topographies [1,6] performed on the real samples.
One vibrating mode (so-called C-mode) is mainly sensitive both to a compressional diametral force and to the temperature, while the other mode (B-mode) is about fifty times more sensitive to the temperature and almost insensitive to the applied force.
Figure 1-2 explains the geometry of the resonator plate while figures 3.a,b,c shows several pictures of the first series of prototypes.
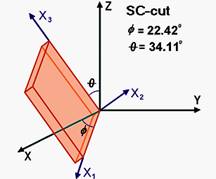
Figure 1. SC-Cut in quartz. (XYZ) represents crystalline system of axis and (X1X2X3) is the cut coordinates system
Figure 2. SC-Cut resonator geometry. (X1X2X3) is the local mode system of axis turned by the angle yn w.r.t. (X1X2X3). The external force F is applied at ya azimuth angle.
The mark in Figure 3 is made during manufacturing of plate for orientation purposes and represents the projection of the crystallographic axis X over the (X1X3) plane of the cut. The value of the turning angle is 130.


Figure 3.a) Plate completely metalized by vacuum deposition
b) Plate after UV photolithography
c) Resonator with electrical connections under compressional force setup.
TRANSFER EQUATIONS SET
This part discusses electrical equivalent schematic and motional parameters values necessary to design the electronic oscillators. Afterwards it presents experimental results from testing the first prototypes and establishes the method to compute the force and temperature based on the two resonant frequencies of B and C modes.
2.1 Equivalent electrical schematic
The first series of samples were tested in a passive PI network, in order to calculate the equivalent electrical parameters, according to the schematic shown in figure 4.
Quality factors Q of the resonators were found to be equal with 211037 and 120800 respectively. Motional resistances R1 range around 2030 kW, inductances L1 around 5590 H, and equivalent dynamic capacitances C1 equal about 0,005 fF as seen in the table below.
Pairs of electrodes are named according to paper [1] notation. Static parallel capacitance Co of the pair P2+P4 intended to work for the C-mode is 3,1 pF and the value of static capacitance of the B-mode pair P1+P3 is equal to 2,7 pF.
|
Obs. |
fs [Hz] |
R1 [ohm] |
L1 [H] |
C1 [F] |
C0 [pF] |
|
Mod (C,3,0,1) Electr. P2+P4 in antiparallel |
4,6 E-18 | ||||
|
Mod (B,3,0,1) Electr. P2+P4 in antiparallel |
6,8 E-18 | ||||
|
Mod (C,3,1,0) Electr. P1+P3 in antiparallel |
8,2 E-18 | ||||
|
Mod (B,3,1,0) Electr. P1+P3 in antiparallel |
5,8 E-18 |
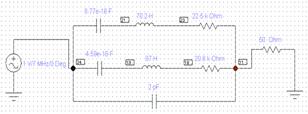
Figure 4. Electrical equivalent schematic electrodes pair P2+P4 [1].
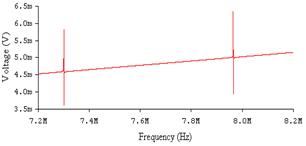
Figure 4. Frequency analysis simulation.
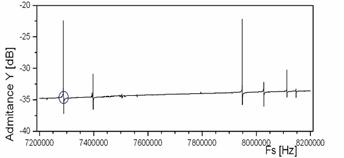
Figure 5. Experimental frequency spectrum
The operating frequency for this pair of electrodes (P2+P4) is marked by a circle in figure 5. The rest of the modes are unwanted ones and can be further suppressed by the electronic oscillator.
2.2 Frequency to temperature experimental characteristics
Frequencies temperature curves of the resonators were investigated under a controlled oven between 15 0C and +90 0C. However, experiments can be performed over a wider temperature range. As known, mode B offers large temperature sensitivity, with a fairly linear slope. The C-mode is temperature compensated, exhibiting a cubic frequency to temperature curve. We fitted the experimental data under different polynomials of various orders, and finally we came to the conclusion that for the interval 100C +800C the optimum fit of the B mode is made with by a 2nd order polynomial, while the C-mode is described by a 3rd order polynomial. Larger polynomial orders do not improve significantly the correlation coefficient SD, but only complicate the formulas by adding extra terms difficult to handle by 8-bit microcontroller systems for example.
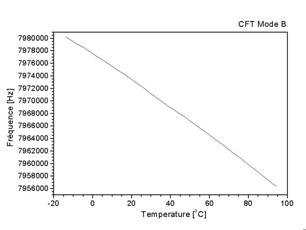
Figure 6. Frequency temperature characteristic fB = f (t) of B-mode.
Mode (B,3,1,0). Polynomial Regression for CFTM2B:
Y = A + B1*X + B2*X^2
Parameter Value Error
A 7,97756E6 7,137
B1 -203,1257 0,48741
B2 -0,22721 0,00663
R-Square(COD) SD N P
36,17484 81 <0.0001
The curves are expressed by the following equations:
![]() and
and
![]() ,
,
where t is the temperature and: ![]()
![]()
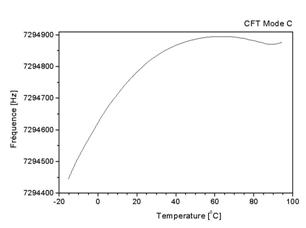
Figure 6. Frequency temperature characteristic fC = f (t) of the C-mode.
Mode (B,3,1,0). Polynomial Regression for CFTM2B:
Y = A + B1*X + B2*X^2
Parameter Value Error
A 7,97756E6 7,137
B1 -203,1257 0,48741
B2 -0,22721 0,00663
R-Square(COD) SD N P
36,17484 81 <0.0001
2.3 Force to frequency experimental characteristic
Diametral force sensitivity was previously investigated [4],[5] and is known to depend of the azimuth angle (figure 1). For a given direction the force-frequency dependence is linear up to 95% of the crushing load.
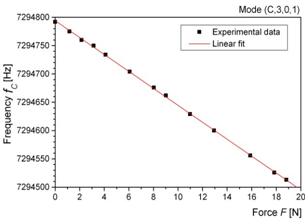
Figure 8. Linear frequency to force characteristic of C-mode fC = f (F) at ya = 75 0azymouth angle.
As seen in figure 3.c, we tested the resonant structure under compressional diametral force by adding calibrated weights on the mobile superior blade. Nonlinearities of frequency response in figure 8 are not caused by the sensor, but especially by the bearing frictions.
It has been experimentally investigated the frequency coefficient of force sensitivity for different force orientations [1]. Finally, it has been recorded that for an azimuth angleya = 75 0 the force sensitivity of the C mode is almost maximum while the force sensitivity of the B mode is insignificant.
Linear Fit for Frequency-Force Characteristic:
Y = A + B * X
Parameter Value Error
A 7294794,04 0,84218
B -14,94751 0,08037
For the azimuth angleya = 75 0
the experimental sensitivity coefficients of the C and B modes are: ![]()
![]()
2.4 Transfer equations of force and temperature and related errors formulae
Finally we get the set of equations relying the frequencies to nonelectric quantities temperature and force.
![]() (x)
(x)
![]()
From equation (x) we get the temperature value based on fB frequency and SFBF factor.
![]()
Ignoring ![]() factor the set of
equations become:
factor the set of
equations become:
![]()
![]()
With the solution:
![]() , and
, and
![]()
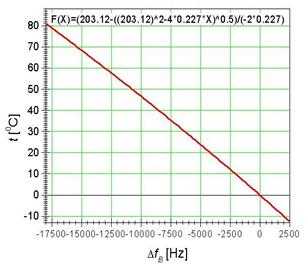
Figure 9. Temperature to frequency transfer function
where ![]() factor is neglected.
factor is neglected.
We computed the ![]() relative error:
relative error:
 where
where ![]()
Force relative error is then given by formula:
![]()
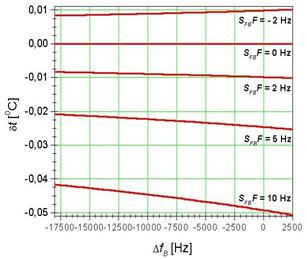
Figure 10. Temperature absolute error caused by
neglecting ![]() factor
factor
3. Distributed electronic architecture
Main components of the electronic system of measurement are based on a master-slaves architecture. Precise time base is obtained from a 20 MHz reference temperature compensated oscillator (TCXO). This component is critical, since the accuracy of the system is dependant on the stability of the frequency reference; two types of connections are possible. In figure 11 the reference serves all slave microcontroller where three counters are enabled. The alternative to use two counters is to connect the TCXO to the master microcontroller which generates precise delay hardware interrupts for all slaves (figure 12).
Figure 11. Architecture of measurement system where precise delay interrupts are generated by the master microcontroller connected to a TCXO.
Figure 12. Architecture of measurement system where the reference TCXO signal is connected to the bus.
3.1 Slave microcontroller schematic
Slave microcontroller schematic contains the following components:
Two independent oscillators connected to the multielectrode resonator
A microcontroller with three 16 bit integrated counters (PIC18F1320)
A EEPROM memory designed to store conversion parameters and recorded data
A synchronous serial interface bus to communicate with the master controller (for adjusting the registers and for delivering the data).
An in circuit debug (ICD2) interface for programming and debugging the mic-rocontroller.
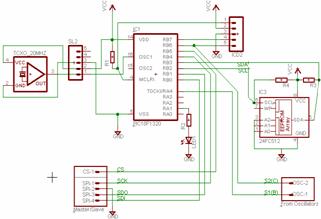
Figure 13. Slave microcontroller schematic connected to TCXO.
3.1 Master microcontroller schematic and interface
Master microcontroller (18F4550) schematic has the following features as seen in figure 14:
A synchronous serial interface bus to communicate with the slave controllers.
An LCD display and a keypad port
Four signaling state LEDs
Four channels 8-bit analog-to-digital inputs to connect to TC1047A temperature sensors, HIH3610 humidity sensor and MPX4115 pressure sensor.
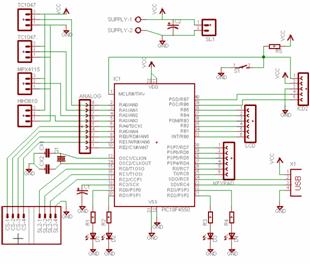
Figure 14. Master microcontroller schematic
The microcontroller is able to handle USB communication. The computer interface was done by USB-HID protocol.
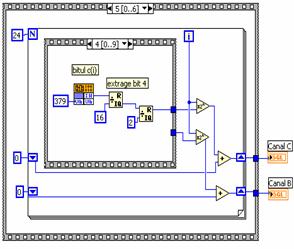
Figure 15. Labview block diagram interface
4 CONCLUSIONS
Frequency output resonators intended for non-electrical quantities offer a better noise immunity than classical voltage output sensors, being suitable for remote or distributed systems, especially on harsh environments.
Nowadays, since microcontrollers and compilators [8] are very accessible and powerful, containing for instance integrated counters and bus interfaces, the design of high precision measurement systems for resonant sensors is straightforward, as seen in this paper. Further developments consist to improve the microcontroller-distributed algorithm and to realize a performing virtual instrumentation interface under National Instruments LabView [9].
Acknowledgments
Main author would like to acknowledge the EU project QxSens - Multi-channel measurement and control system based on resonant piezoelectric crystal sensors (G6RD-CT-2002-00648) for allowing research funding as well as the prolific collaboration with professors Roger Bourquin and Bernard Dulmet from FEMTO-ST Department LCEP/ENSMM, Besanon, France.
REFERENCES
Ivan, R. Bourquin, B. Dulmet, Dual mode, multiple electrodes quartz sensor, Proc. IEEE Int. Ultrasonics Symposium (2005)
J. Zelenka, Piezoelectric Resonators and their Applications,
Czechoslovak
R. Bourquin, J.J. Boy, B. Dulmet, SC-cut resonator with reduction of B-mode electrical response, Proc. IEEE Int. Frequency Control Symp. (1997)
[4] R. Bourquin, B.Dulmet, Force Sensitivity of trapped energy vibrations in a contoured resonator, 41st Ann.Freq.Cont.Symp. p. 289-294 (1987)
B.Dulmet, R.Bourquin, N.Shibanova, Frequency-output force sensor using a multimode doubly rotated quartz sensor, Sensors and Actuators, A 48, p.109-116 (1995)
G. Genestier, Application de la topographie par rayons X a letude des modes de vibration dans un resonateur a onde de volume, These de doctorat lUniversit de Franche-Comt (1982)
***, PIC18F4550 Data Sheet, Microchip Technology Inc., (2004)
***, MikroBasic 2.0 Users Manual, MikroElektronika (2005)
***, Labview 6 Users Manual, National Instruments, (2002)
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3049
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved