| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Erori ale masuratorilor efectuate cu tehnologia GPS
Precizia masuratorilor de pozitionare sau de navigatie,efectuate cu ajutorul tehnologiei GPS, este dependenta de precizia cu care se determina distanta (range) de la satelit la receptor.
Erorile care se pot comite in acest gen de masuratori sunt de doua tipuri:
1. Erori accidentale de masurare si de observare, cum ar fi eroarea datorata parcursurilor multiple (multipath), electronica aparaturii de la bordul satelitului si ale receptoarelor, interferentele electromagnetice, excentricitati ale centrilor de faza ale antenelor, etc;
2. Erori sistematice (bias), cum ar fi erorile datorate ceasurilor de pe satelit si receptor, erorile de refractie cauzate de troposfera si ionosfera, erorile datorate orbitelor satelitare, etc;
Aceste erori sunt permanent prezente in cadrul masuratorilor, separat de acestea existand si alte erori induse cu buna stiinta de cei ce gestioneaza sistemul de pozitionare GPS si care, chiar daca nu actioneaza permanent, au ca scop degradarea preciziilor de pozitionare si navigatie in timp real, actiune numita "Disponibilitate Selectiva" si "Anti-furt", in engleza "Selective Avillability - SA" si "Anti-spoofing - AS".
Tinand cont de diferitele surse de eroare, constatam ca pozitionarea absoluta efectuata cu ajutorul masuratorilor de cod s-ar situa ca precizie de pozitionare planimetrica in jurul valorii de cca. +/-100 m.
Daca aceste erori sunt tolerabile, in cazul aplicatiilor privind calculul vitezei de deplasare a unui mobil sau pozitionarea acestuia, pentru scopurile geodezice si geodinamice aceste precizii sunt intolerabile si in acest sens analizarea erorilor, a cauzelor care le produc, precum si a metodelor de inlaturare sau diminuare a acestora, este strict necesara.
1 Erorile accidentale
Potrivit unor reguli din literatura de specialitate, precizia de determinare cu ajutorul tehnologiei GPS poate fi estimata acoperitor, ca avand valoarea de cca. 1% din lungimea de unda.
Aceasta apreciere conduce la precizii diferite potrivit cu diversele observabile care sunt luate in considerare, dupa cum urmeaza:
codul C/A: precizia = 1%l 1%*300m = +/- 3m
codul P : precizia = 1%l * 30m = +/- 0.3m
L1 si L2 : precizia = 1%l = 1%*0.2m = +/- 0.002m
In realitate, aceste precizii sunt simple supozitii teoretice, astfel incat trebuiesc analizate in continuare diferitele surse de erori si contributul lor la stabilirea preciziei masuratorilor.
1.1 Erorile de multiparcurs
In cazul determinarilor de precizie este absolut necesar ca atat in faza observatiilor de teren, cat si in cadrul fazei de prelucrare, sa se aiba in vedere toate sursele de erori.
Eroarea de multiparcurs (multipath) apare atunci cand o parte a semnalului de la satelit ajunge la receptor intr-o maniera indirecta, prin reflectare de diferite suprafete amplasate mai aproape sau mai departe de receptor.
Masuratoarea intre centrele de faza al antenei receptorului si ale antenei satelitului nu mai are deci un parcurs rectiliniu, aparand acelasi fenomen de intarziere al semnalului si de crestere a distantei masurate. Receptoarele din ultimele generatii au softul de prelucrare mai "dotat" si poate sa elimine din inregistrari semnalele parazitate de efectul de multiparcurs.
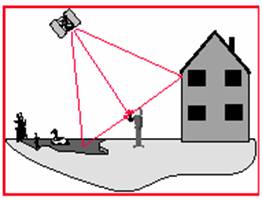
Fig. 1.7. Eroarea multipath
1.2 Erori datorate excentricitatii centrului de faza al antenei
Aceasta eroare este datorata variatiei pozitiei centrului de faza al antenei, care in fapt este o problema teoretica de electronica si nu de mecanica, aceasta datorita variatiei in functionare a frecventelor (centrul de faza pentru portanta L1 nu coincide cu centrul de faza a portantei L2) si elevatiei satelitului care emite semnalul. Din punct de vedere al utilizatorului, pentru ca aceasta eroare, cand exista, sa nu fie amplificata este necesar ca orizontalizarea antenei precum si orientarea ei sa se faca cu maximum de atentie.
Aceste erori au o valoare mica, in jurul a 2-3cm, dar aceasta valoare devine importanta pentru determinarile de precizie in probleme de nivelment.
1.3 Erorile datorate electronicii receptorului
O serie de alte erori depind de starea tehnica a componentelor electronice ale receptorului. De exemplu, masurarea diferentelor de faza reprezinta o modalitate de corelare in timp real si in acest caz este foarte important ca semnalul de la satelit sa nu fie depreciat, pentru a permite o corelare optima.
Calitatea semnalului depinde oricum, in mare masura, de eventuale interferente electomagnetice care pot cauza cresterea zgomotului semnalului si, in unele cazuri nefavorabile, sa conduca chiar la pierderea semnalului.
2 Erorile sistematice
2.1 Erorile de ceas
Erorile de ceas ale satelitilor si ale receptoarelor, pot fi sa fie divizate in doua componente:
asincronismul (offset) ceasurilor, fapt ce conduce la o deplasare a originii de masurare a timpului;
deriva, datorata teoriei relativitatii, dependenta de timp;
Pentru perioade de scurta durata, aceste erori pot fi modelate de polinoame de ordinul doi, pentru ceasurile atomice de la bordul satelitilor si de polinoame de grad superior, pana la ordinul opt, pentru ceasurile cu cuart ale receptorilor GPS.
2.2 Erorile de orbita
Este cunoscut faptul ca pentru pozitionarea GPS este necesar sa fie cunoscute orbitele satelitilor observati (efemeridele), in sensul de a se cunoaste la fiecare epoca de inregistrare coordonatele cat mai precise ale centrului antenei de emisie a satelitului.
Aceste date referitoare la orbite, reunite in notiunea de efemeride, au o precizie diferita, dupa cum urmeaza:
"broadcast", efemeride transmise in mesajul de navigatie care au precizie in jurul a 30-50 de metri;
"precise", efemeride care sunt calculate si pot fi utlizate dupa perioada de observatii, in cadrul etapei de procesare a datelor si au precizii metrice si chiar subdecimetrice;
Dupa cum s-a mai specificat, aceste erori au repercursiuni asupra pozitionarii absolute si afecteaza in mod direct coordonatele spatiale ale receptorului.
In cazul in care observatiile se realizeaza prin metoda diferentiala sau relativa, influenta acestor erori in pozitionare este minora.
In asemenea cazuri, care la utilizarea tehnologiei GPS in domeniul geodeziei sunt normale, se poate observa ca abaterile standard relative ale bazelor masurate sunt relativ de acelasi ordin de marime cu abaterile standard relative ale distantelor (range) satelit - receptor, adica:
![]() (1.27)
(1.27)
Intelegand prin b, lungimea bazei determinate, r distanta satelit - receptor si prin sr si sb abaterile standard absolute ale acestora, conform relatiei (1.27), ele pot fi considerate proportionale.
Daca in relatia (1.27) se trece la diferente si se considera altitudinea medie a satelitilor, r =20000km in tabelul 1.1 de mai jos se prezinta, in functie de valorile "dr", erori ale orbitelor satelitare, valorile "db", erori ale bazelor determinate in functie de lungimea acestora:
Tabel 1.1
|
Nr. crt.. |
Eroare orbita (m) |
Lungime baza(km) |
Eroarea bazei(ppm) |
Eroarea bazei(mm) |
|
|
2.3 Erorile datorate refractiei troposferice
Troposfera reprezinta, segmentul de baza al atmosferei, cuprins intre suprafata Pamantului si o inaltime de cca.40 - 50 km.
Aceasta zona este divizata in doua parti:
partea "umeda"cuprinsa intre suprafata Pamantului si o altitudine de cca. 11km, zona in care umiditatea atmosferica este prezenta si are valori semnificative;
partea "uscata cuprinsa intre altitudinea de cca.11km si 40km .
Refractia troposferica provoaca o intarziere a receptionarii semnalului de la satelit, intarziere care conduce la cresterea timpului de parcurgere a distantei de la satelit la receptor si in consecinta o crestere sistematica a distantelor.
Intarzierea datorata refractiei troposferice este independenta de frecventa semnalului, aceasta comportandu-se identic fata de cele doua unde purtatoare L1 si L2, dar este dependenta de parametrii atmosferici si de unghiul zenital sub care se gaseste receptorul fata de satelit.
Valoarea refractiei troposferice creste exponential cu valoarea unghiului zenital si din aceste motive nu este recomandabil a se efectua observatii la satelitii care apun sau rasar, decat dupa ce au intrat sau au iesit, sub unghiul zenital de 700 - 750.
Pentru eliminarea acestei erori sistematice, s-au realizat mai multe modele matematice printre care cele mai utilizate sunt cele realizate de Hopfield si Saastamoinen, fiind de amintit si realizarile lui Good-Goodman, Black, Niell, Chao si altii.
Modelul Hopfield, are urmatoarea forma:
 (1.28)
(1.28)
unde:
dRtrop = (R0 - R) eroarea troposferica
R distanta rectilinie (geometrica)
R0 distanta masurata
P presiunea
atmosferica [mbar] ![]()
TK temperatura [grade Kelvin]
eP presiunea umeda [mbar]
z unghiul zenital [sexa]
Dupa cum se poate observa din relatiile (1.28)[Cina,2000], corectia troposferica, dRtrop, are doi termeni: primul (K) care reprezinta contributul componentei uscate, deci a zonei superioare a troposferei si al doilea (L), care reprezinta componenta umeda aferenta zonei de la suprafata Pamantului, ambele calculate fata de zenitul locului.
Gradul de incertitudine al modelului, estimat la cca.5%, este datorat dificultatilor de modelare ale componentei umede, datorita distributiei necontrolate a vaporilor de apa in lungul traseului semnalului, de la satelit la receptor.
2.4 Refractia ionosferica
Ionosfera, reprezinta o alta parte a atmosferei terestre, cuprinsa intre altitudinea de 40 - 50 km, pana la cca 1000 km.
Erorile datorate refractiei ionosferice depind de frecventa semnalului si deci ele au valori diferite pentru cele doua unde purtatoare L1 si L2.
Aceasta eroare care se manifesta prin intarzierea semnalului de la satelit la receptor si care de fapt face sa creasca timpul de parcurs al semnalului, are consecinte directe in marirea distantelor masurate la sateliti, aceasta eroare eliminandu-se printr-o combinatie oportuna a putatoarelor L1 si L2.
Modelarea matematica a procesului de calcul al corectiei ionosferice se realizeaza cu ajutorul unei dezvoltari in serie (Willman -Tucker,1968):
![]() (1.29)
(1.29)
in care dRiono este eroarea datorata ionosferei, f este frecventa semnalului si Bi depinde densitatea electronilor liberi si are valoare estimata cu urmatoarea relatie:
![]() (1.30)
(1.30)
in care:
Ni = densitatea electronilor in functie de altitudinea h (km);
Ai = constanta de estimare;
r0 = parcursul semnalului ;
Pentru frecvente inalte, cum sunt semnalele GPS, termenul doi, din formula (1.29), poate fi neglijat, valoarea erorii datorate refractiei ionosferice putand fi data de relatia:
![]() (1.31)
(1.31)
Masurand distanta Rji, intre satelitul "j" si receptorul "i", cu ambele purtatoare L1 si L2 , din cauza efectului diversificat al refractiei ionosferice asupra frecventelor "f1" si "f2," se obtin pentru distanta, valorile R01 si R02 , dupa cum urmeaza:
 (1.32)
(1.32)
Egalizand cele doua relatii de la grupul de formule (1.32) se obtine:
![]() (1.33)
(1.33)
si in acest fel se obtine distanta (range), ca o combinatie a celor doua frecvente:
 (1.34)
(1.34)
In acest fel, distanta Rij se determina combinand cele doua frecvente si se poate elimina efectul refractiei ionosferice asupra distantei.
Utilizarea receptoarelor cu dubla frecventa este indispensabila cand se intentioneaza masurarea unor baze mai mari de 15km , sub aceasta lungime, efectul refractiei ionosferice putand fi eliminat prin masuratori diferentiale sau relative.
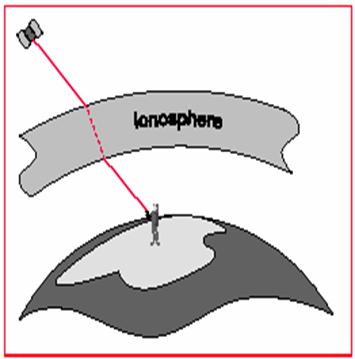
Fig. 1.8.Refractia ionosferei
In sinteza, valoarea erorilor sistematice care afecteaza distanta de la satelit la receptor au valorile prezentate succint in Tabelul 1.2:
Tipul erorii sistematice |
Eroarea |
ERORILE DE CEAS- satelit (cu parametrii corectati) - receptor |
5 - 10 m 10 - 100 m |
ERORILE DE ORBITÃ- efemeride "broadcast" - efemeride "precise" |
20 - 40 m 3 - 5 m |
ERORILE DE REFRACTIE- ionosferica - troposferica |
20 - 50 m 2 - 10 m |
3 Accesul la masuratori
Odata cu inceperea lansarii satelitilor din blockul II, sistemul GPS a devenit disponibil pentru toti utilizatorii civili insa gestionarul sistemului, DoD (Department Of Defence- USA), a implementat o serie de tehnici care sa-i permita control, protectie si siguranta, asupra intregului sistem, in special asupra preciziilor pe care la poate asigura la un moment dat.
La origine, precizia de pozitionare absoluta cu ajutorul masurarii codului C/A, a fost estimata la cca 400m, insa practica a demonstrat ca in realitate precizia obtinuta este mult mai mare si anume cca 20-40m.
Din acest motiv DoD, a implementat tehnicile Selective Availlability - SA care constituie asa numitul Acces selectiv si Anti-Spoofing - AS, care reprezinta tehnica Anti-furt.
3.1 Metoda selectiva
Prima metoda, SA, permite DoD sa realizeze o degradare controlata a preciziilor de pozitionare si de navigatie in timp real, prin doua modalitati:
degradarea controlata a preciziilor ceasurilor (procesul d);
manipularea controlata a efemeridelor satelitilor GPS (procesul e).
Prin aceste doua modalitati, degradarile preciziilor de pozitionare au urmatoarele valori declarate de DoD:
probabilitate 95.0%: 100m. in planimetrie si 156m. in altimetrie;
probabilitate 99.9%: 300m. in planimetrie si 500m. in altimetrie;
Procesul "d reprezinta o modificare a frecventei fundamentale a ceasurilor de pe sateliti, cu impact de eroare direct asupra masuratorilor de pseudo-distante. Acestea pot avea variatii de pina la cateva zeci de metri in cateva minute.
Procesul "e consta in trunchierea unor informatii transmise prin semnalul de navigatie, in maniera de a nu permite un calcul precis al pozitiilor orbitale ale satelitilor, cu valori intre 50 - 150m, cu consecinte care cauzeaza erori semnificative pentru pseudo-distante.
Efectul procesului "d poate fi eliminat prin procedeul de lucru relativ sau diferential, iar efectul procesului "e , se elimina in postprocesare, prin utilizarea efemeridelor precise si nu a celor transmise de MCS (broadcast).
Metoda SA a fost activata pentru prima oara in anul 1990 si in anul 2000 a fost dezactivata.
3.2 Metoda anti-furt
Metoda AS (Anti-Spoofing) produce o recodificare a codului P in codul Y care poate fi accesat de utilizatorii militari si un numar restras de utilizatori civili..
Aceasta metoda afecteaza in general navigatia in timp real cu codul P, care este de cca zece ori mai precisa decat navigatia in timp real cu codul C/A.
Tehnicile GPS de pozitionare absoluta, dupa cum s-a putut vedea, sunt afectate de erori de complexitati diferite, care ne conduc la precizii insuficiente in aplicatiile geodezice.
Pentru a ajunge la precizii ridicate, se poate concluziona ca trebuie abandonata pozitionarea absoluta, "single point" are o semnificatie pur principiala in masuratorile geodezice si potrivit tehnicilor cunoscute de la geodezie si topografie, unde erorile sistematice se cauta sa fie elimine prin metode de masurare (ex. la nivelmentul geometric stationarea la mijloc, cu portei egale, conduce la eliminarea erorilor de refractie, sfericitate, focusare, etc.) cum ar fi, efectuarea de diferente de pozitie, care ar duce la eliminarea sau diminuarea unei serii de erori sistematice, comune celor doua statii.
Posibilitatile de a putea realiza diferente de pozitie sunt oferite de tehnicile GPS, diferentiale si relative, tehnici la care se pleaca de la conceptul ca bazele care se masoara sunt diferite, dar au un continut geometric asemanator.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 5358
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved