| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Din punct de vedere constructiv se apropie mult de masinile de c.c. clasice. Statorul, cilindric, constituie un jug inconjurat de carcasa, iar inspre interior cuprinde inductorul, sub forma clasica a polilor de excitatie care prezinta infasurari sau a magnetilor permanenti, iar in unele cazuri atat infasurarile cat si magnetii permanenti.
Servomotorul cu excitatie
electromagnetica se folosesc in general al puteri mari. Circuitul magnetic se
realizeaza din tole si prezinta, la puteri mari (SMA),
infasurari de compensatie precum si poli auxiliari fig.7a.1a.
In ultima vreme, tot mai mult s-a trecut pe utilizarea magnetilor
permanenti de tip Alnico sau
ferite. Varietatea constructiva a servomotoarelor excitate cu magneti
permanenti este dictata de caracteristicile diferite ale materialelor folosite.
In fig. 7b, este folosita o solutie constructiva adoptata de firma Blocher, fiind folositi magneti de tip Alnico cu inductie remanenta mare si camp coercitiv mic, magnetii avand aspectul unor poli prevazuti cu talpi polare din tole, in scopul reducerii efectului demagnetizant al reactiei indusului. Magnetii au lungimi mari, iar magnetizarea se face in circuitul magnetic al masinii montate cu ajutorul unor bobine plasate in jurul magnetilor.
In fig.7c, este reprezentata o alta varianta care utilizeaza magneti metalici coercitivi (Tyconal). Magnetii sunt plasati pe coarda, iar pentru inchiderea campului magnetic se utilizeaza piese polare speciale plasate intre magneti. Carcasa nu prezinta rolul de jug si poate fi realizata din aluminiu turnat.
In cazul celor doua variante prezentate, numarul de poli ai masinii este limitat la 4 - 8 din considerente fizice, fiind cu atat mai mic cu cat dimensiunile masinii sunt mai reduse. O reducere a volumului de magneti are loc daca intrefierul este adus la limite inferioare din considerente mecanice, in schimb sunt amplificate efectele reactiei indusului si ale variatiei reluctantei circuitului magnetic datorita prezentei crestaturii rotorice.
In fig.7d, este
prezentata o masina excitata cu ferite. Magnetii
poseda o lungime mai mica, iar numarul de poli este mai mare (10
- 12). Functionarea ramane eficienta si la intrefieruri
mari. In varianta figurata nu se utilizeaza piese polare, ca in fig. 7c,
si la care lungimea magnetilor este mai redusa, iar numarul
polilor este mai mare.
Motoarele cu excitatie electromagnetica si cu magneti permanenti se folosesc in cazurile cand se impun coeficientii tensiune/cuplu variabili in anumite limite, fara utilizarea unei surse de tensiune reglabila. Aceste motoare au, in general, o anumita comportare diferita in cele doua sensuri de rotatie, de exemplu, viteza mare la cuplu mai mic, intr-un sens si viteza mica la cuplu mare, in celalalt sens. Infasurarea de excitatie este divizata: intr-un sens fluxul ei este contrar fluxului magnetului permanent, iar in celalalt sens cele doua fluxuri au acelasi sens.
Servomotoarele cu rotor cilindric au, in general, lungimea mult mai mare decat diametrul, ceea ce face ca, spre deosebire de motoarele clasice sa prezinte un moment de inertie mai mic. Totodata, crestaturile sunt deschise pentru a reduce efectele comutatiei, iar numarul de spire pe sectie este redus la minimum (uneori chiar ws=1). Intrucat aceste motoare trebuie sa suporte, in anumite regimuri, socuri de curent insemnate, in regim nominal se alege densitatea de curent in rotor destul de scazuta.
Vitezele de rotatie pentru care se construiesc variaza intre 500 rad/s la servomotoarele mari, avand 5 - 6 perechi de poli. Vitezele maxime sunt limitate din considerente mecanice si de comutatie.
Crestaturile rotorice se inclina pe directia generatoarei pentru a limita variatiile de reluctanta a sistemului stator - rotor.
Servomotoarele cu rotor cilindric, SMU-C, excitate cu magneti permanenti metalici, utilizate la actionarea avansurilor la masini - unelte, se construiesc la I. Electromotor-Timisoara. Se construiesc tipodimensiunile avand cuplurile nominale: 7, 17, 35, 55, 125, Nm, la viteze nominale: 1000, respectiv, 500, 500, 5000 si 300 rot/min.
Servomotoarele SMA, cu excitatie electromagnetica se construiesc la I. M. Radauti, fiind utilizate, de asemenea la actionarea avansurilor pentru masinile unelte.
1.. SERVOMOTOARE CU ROTOR DISC SI INTREFIER AXIAL
Servomotoarele cu rotor disc au capatat o larga raspandire in ultimele doua decenii, datorita, in primul rand, faptului ca prezinta o constanta de timp redusa in raport cu constructiile clasice, la aceeasi putere. In principiu, aceste servomotoare prezinta un stator sub forma a doua flanse (coroane) circulare feromagnetice, pe una sau pe ambele fiind plasati magneti permanenti si un rotor sub forma unui disc din material (neferomagnetic), pe care este imprimata infasurarea rotorica, de tip ondulat fig.8.
Capetele infasurarii imprimate se continua la partea spre ax a rotorului cu o portiune mai ingrosata, avand aspectul unor lamele radiale si care constituie colectorul masinii. Pe colector calca periile, contactul dintre perii si colector realizandu-se astfel pe suprafete plane. Magnetii permanenti se fixeaza prin lipire pe coroanele (flansele) laterale, care indeplinesc rolul de jug de inchidere a campului magnetic. Polii magnetilor, asezati fata in fata pe cele doua flanse, sunt de semne contrare, campul magnetic inchizandu-se astfel axial (coliniar cu axa arborelui) prin intrefierul masinii, in care se gasesc si discul rotoric. Magnetii plasati pe coroane se succed alternativ pe circumferinta, N-S-N-S. Exista si variante constructive la care numai una din cele doua coroane poseda magneti permanenti, celelalte permitand numai inchiderea campului magnetic. La unele constructii, mai ales la cele care sunt echipate cu magneti permanenti metalici (Alnico, de exemplu), in jurul magnetilor permanenti se realizeaza bobine cu rolul de magnetizare a masinii in stare montata. De obicei, sunt plasate doua infasurari (bobinate in cele doua sensuri posibile) care, in timpul functionarii, sunt inseriate cu circuitul indusului si au rolul de compensare a fluxului, intarind deci fluxul magnetilor permanenti, atat pentru cazul alimentarii masinii corespunzatoare unui sens de rotatie. Din acest motiv este indicat ca la conectarea la sursa a servomotorului sa se tina seama de polaritatea sursei, corelata cu sensul de rotatie dorita.
Infasurarea rotorica, realizata in general din cupru (in ultima vreme s-au construit si infasurari din Al), se obtine prin metoda matritarii (stantarii) sau prin metoda corodarii.
In prima metoda se utilizeaza tabla de Cu (de 0,2 mm grosime), care este stantata , corespunzator cu forma infasurarii ce se cere realizata si care apoi se lipeste cu rasini epoxidice pe discul de material plastic sau din fibra de sticla. Conductoarele plasate astfel pe cele doua fete ale discului (pe o fata conductoarele de ducere - cu linie plina in fig.8 si pe cealalta fata conductoarele de intoarcere - cu linie intrerupta) se sudeaza la capete prin fascicul de electroni sau chir prin scantei, legatura strabatand discul sau mai frecvent ocolind discul prin zona de diametru maxim.
Prin cea de a doua metoda, circuitele imprimate se obtin asemanator cu circuitele folosite in schemele electronice. Se lipeste foaia de cupru pe suportul electroizolant (disc), se acopera cu un strat protector portiunea infasurarii ce trebuie sa ramana pe disc, se supune discul procesului de corodare chimica, astfel incat este inlaturata portiunea din foaia de cupru care nu este necesara.
Fig. 5.8
Discul electroizolant trebuie sa aiba o rigiditate mecanica deosebita si sa reziste la temperaturi ridicate (peste 2000C). Rotorul-disc se lipeste pe o flansa, solidara cu axul masinii si care uneori poarta si palete de ventilatie. L puteri mari se cere o consolidare a discului intre doua flanse, care asigura si centrarea, eliminand totodata si fenomenele de dezlipire a discului in conditii de suprasarcina, cand pot aparea si eforturi axiale datorate imperfectiunilor constructive inerente. La puteri mari, intrucat suprafata discului este limitata, se folosesc discuri suprapuse (2 sau 3), infasurarile conectandu-se in serie. Cresterea numarului de discuri suprapuse este limitata, deoarece in aceeasi masura creste si marimea intrefierului masinii. Diametrele discurilor folosite se gasesc intre 60 - 500 mm.
Utilizarea circuitelor imprimate in constructia servomotoarelor electrice prezinta unele avantaje tehnico-economice si functionale: - servomotoarele cu rotor disc au caracteristici mecanice si de reglaj liniare, intrucat rotorul nu prezinta fier, reactia indusului si comutatia prezinta influente reduse; - constantele de timp electrice sunt reduse (chiar sub 0,1ms), desi constantele mecanice se mentin inca ridicate, cresterea razei de giratie a discului compenseaza oarecum diminuarea greutatii discului; - economiile de cupru sunt insemnate, intrucat la rotorul cu circuit imprimat se poate lucra cu densitati mari, 45 A/mm2, fata de 5 A/mm2 la constructiile clasice; - posibilitatile de automatizare a procesului tehnologic de obtinere a rotorului disc conduc la economii de manopera si reducerea pretului de cost; - randamentul este mai bun, pe de o parte datorita folosirii magnetilor permanenti, iar pe de alta parte absentei pierderilor de putere in fier rotorului si al diminuarii pierderilor prin ventilatie, conductoarele rotorului nefiind introduse in crestaturi; - greutate specifica mica; etc.
Exista, totusi, si o serie de dezavantaje ale acestor masini: numarul limitat de conductoare active pe suprafata discului limiteaza tensiunea aplicata (30 - 60 V pe disc) precum si puterea; viteza de rotatie scazuta (2 -3000 rot/min) care este limitata atat din considerente mecanice cat si de pierderile suplimentare in conductoarele rotorice; intrefierul mare, mai ales cand se utilizeaza mai multe discuri inseriate, conduce la cresterea volumului magnetilor permanenti, etc.
Datorita unei geometrii adecvate, a greutatii reduse, a constantei de timp mici, aceste servomotoare se utilizeaza la aplicatii de mica putere, avansuri la masini-unelte, servovalve, in industria chimica, textila, medicina, calculatoare.
La noi in tara a inceput constructia acestor servomotoare cu 20 de ani in urma la I.C.P.E. - Bucuresti, iar in momentul de fata se construiesc la I.F.M.A.- Bucuresti, servomotoarele avand cupluri nominale in domeniul 0,6 - 35 Nm, cu viteze nominale pana la 300 rot/min. Seria SMU (SMU - ES) prezinta puteri intre 180 - 5500W la
Servomotoare cu rotor cilindric tensiuni de alimentare intre 24 si 170 V si au ca domenii de utilizare actionarea avansurilor la masinile-unelte, actionarea robotilor industriali, etc.
1.4. SERVOMOTOARE CU ROTOR CILINDRIC FARA CRESTATURI
Asa cum sa vazut, prezenta crestaturilor rotorice conduce la aparitia unor oscilatii ale cuplului intre doua limite, intrucat, in timp, se modifica reluctanta circuitului magnetic stator-rotor, deci a fluxului polar, atunci cand o crestatura intra sub talpa polara fata de cazul cand un dinte rotoric intra sub talpa polara. Aceste oscilatii ale cuplului duc la o rotire neuniforma a rotorului, fenomen suparator mai ales la viteze mici, cand se impun domenii largi de reglajul vitezei, de exemplu 1:40000.
Infasurarile rotorice se plaseaza la exteriorul rotorului feromagnetic neted (in intrefierul rotor -stator), fiind inglobate in rasini epoxidice si consolidate cu fibra de sticla.
Aceasta constructie prezinta un intrefier marit, deci in general, gabaritul creste fata de masinile cu rotor crestat. Prezinta, in schimb, unele performante mai bune in regim tranzitoriu. Constantele de timp sunt de 2 - 4 ms. De obicei, se construiesc cu rapoarte mari intre lungime si diametru. Excitatia e realizata cu magneti permanenti sau este electromagnetica. Puterile acestor masini sunt limitate, de aproximativ 3 kW.
2 SERVOMOTOARE CU ROTOR IN FORMA DE PAHAR, NEFEROMAGNETIC
In scopul micsorarii constantelor de timp ale servomotoarelor si a inlaturarii efectelor negative a prezentei crestaturilor, se construiesc masini la care infasurarea rotorica se plaseaza in intrefierul stator-rotor, fiind asezata pe un pahar neferomagnetic, din rasini sau din material plastic iar rotorul interior, neted, din material feromagnetic
devine un al doilea stator, avand rolul de inchidere al liniilor de camp magnetic.
Fig.
5.10
![]()
Constructia acestor servomotoare deriva, deci din cea prezentata in figura 9, la care infasurarile rotorice, impreuna cu suportul lor neferomagnetic, numai sunt solidare cu rotorul neted interior fig.10.
La unele constructii mai noi sa renuntat la suportul neferomgnetic rotoric, infasurarile, consolidate cu ajutorul unor rasini, avand aspectul unui cos sau coaja. Tehnologia de realizare a infasurarilor si in general a rotorului este de multe ori complicata, asemanatoare cu cea utilizata la obtinerea rotorului disc, sau pur si simplu prin bobinarea spira cu spira pe un suport special, care apoi se deformeaza convenabil.
Diametrul acestor motoare este cam 1/2-1/3 din lungime, ceea ce conduce la obtinerea unor constante de timp reduse, momentul de inertie reducandu-se cam de 10 ori fata de constructiile clasice.
Intrucat rotorul nu prezinta fier, constanta electrica de timp este redusa (sub 0,1 ms). Cu aceste motoare s-au realizat acceleratii de 1200 rot/min /ms.
Servomotoarele cu rotor pahar se utilizeaza la antrenarea perifericelor calculatoarelor, in aparatura profesionala de redare si inregistrare a sunetelor, etc.
Colectoarele servomotoarelor de c.c. se executa din lamele de Cu electrotehnic presate pe butuci de material plastic, lamelele sunt izolate intre ele prin folii de mica sau rasini polimerice. La aceste constructii se intalnesc si colectoare radiale, sub forma unor lamele izolate intre ele, plasate in exteriorul fundului paharului, contactul perie-colector realizandu-se pe suprafete plane.
Periile sunt din bronz grafitat sau argint, in general, cu continut de metal ridicat, pentru reducerea caderilor de tensiune. Uzura periei depinde de presiunea de apasare, de curentul prin perie, de presiune atmosferica, etc. In aplicatii pretentioase zgomotul periilor trebuie redus la minimum, caz in care se prefera perii din grafit pur.
Lagarele servomotoarelor se realizeaza, de obicei cu rulmenti. La turatii foarte mari, functionarea rulmentilor nu mai este silentioasa, motiv pentru care sunt preferate lagare de alunecare de bronz sau molibden. Ungerea acestor lagare pune in general probleme, de aceea se mai utilizeaza si asa-zisele lagare cu perna de aer.
Servomotoarele folosite in sisteme automate sunt cuplate mecanic cu traductoare diverse (tahogeneratoare, transformatoare rotative, etc.) care se introduc direct sub aceeasi carcasa. De asemenea, exista unele aplicatii in care se impune ca la disparitia comenzii, viteza
servomotorului sa ajunga la 0 in cel mai scurt timp, de aceea este necesara folosirea unei frane cu magnet permanent, de exemplu, inglobata in interiorul carcasei, fapt ce complica constructia.
3. Controlul vitezei servomotoarelor de c.c.
Schemele de comanda a servomotoarelor de curent continuu sunt, in principiu, mult mai complexe decat cele pentru comanda MPP, intrucat nu mai pot fi utilizate scheme de comanda in bucla deschisa, ci sunt necesare mai multe bucle de reglare, bazate pe reactii dupa curent, viteza si pozitie (fig.30).
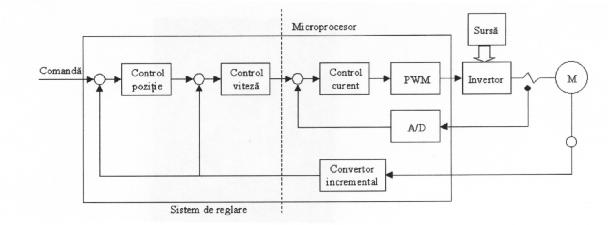
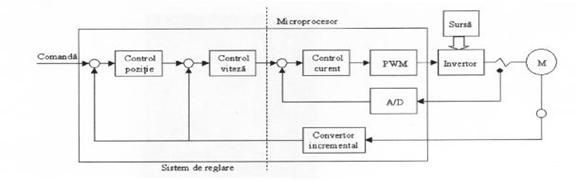
Fig.30 Schema pentru comanda unui servomotor de curent continuu
Modul in care se realizeaza controlul vitezei unghiulare la un servomotor de c.c, poate fi inteles pe baza caracteristicilor mecanice ale motorului w = f(M), prezentate in figura 31, a. Aceste caracteristici sunt drepte usor descrescatoare, care depind de tensiunea de alimentare, UA, a infasurarii motorului. Daca, de exemplu, tensiunea este egala cu tensiunea nominala, motorul va functiona la viteza unghiulara (turatia) nominala, pentru tensiuni de alimentare mai mari vitezele unghiulare vor fi mai mari, iar pentru valori mai mici ale tensiunii ele vor scadea. Prin modificarea tensiunii de alimentare in limite foarte largi si vitezele unghiulare ale servomotoarelor de curent continuu pot fi variate intr-o plaja ampla. Variatia tensiunii de alimentare poate fi realizata cu amplificatoare liniare, cu variatia continua a tensiunii [KUO81], dar cvasi-totalitatea solutiilor utilizeaza amplificatoare comandate in impulsuri ("Chopper") - fig.31, b. In aceasta figura, CS, reprezinta blocul comutatoarelor statice (tranzistoare de putere), comandat sa inchida (pe parcursul timpului activ, ta) circuitul de alimentare a infasurarii, timp in care curentul creste exponential (s-a reprezentat simplificat cu un segment de dreapta), dupa care, pe parcursul intervalului tp (pauza), CS intrerupe alimentarea infasurarii, iar curentul, care descreste exponential (segmentul de dreapta cu panta descrescatoare), se inchide prin dioda supresoare, DS. In acest fel, infasurarea motorului este alimentata cu tensiunea medie.
Pot fi luate in considerare doua metode de alimentare in impulsuri:
Cu ta constant si tc variabil Pulse Frequency Modulated Amplifier (PFM);
Cu tc constant si ta variabil Pulse Width Modulated Amplifier (PWM) -
fig.31,c; Este metoda cea mai des folosita, iar toate procesoarele numerice mai
performante au un numar de iesiri PWM, care pot fi programate pentru diferite
frecvente si latimi ale impulsurilor [DUM3b], [DUM3c].
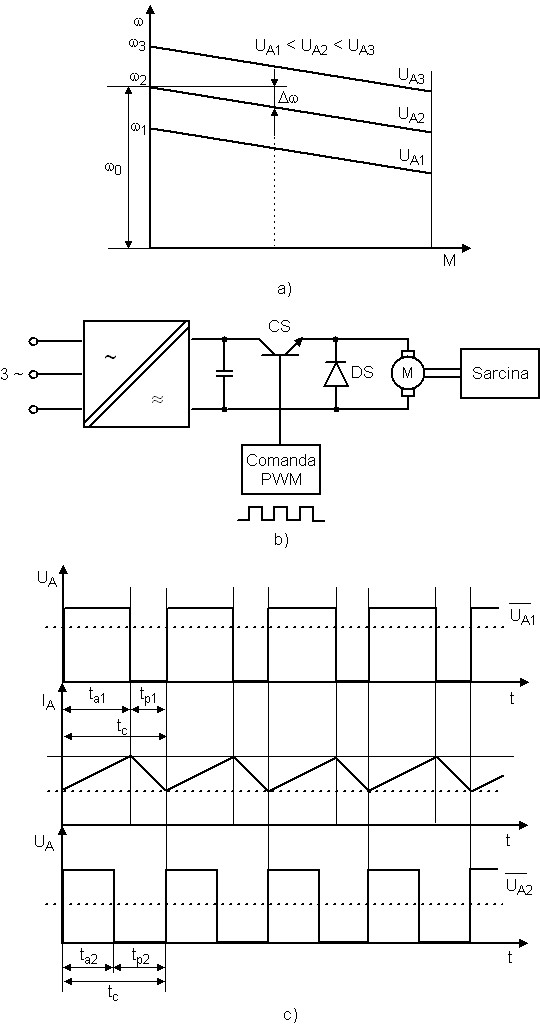
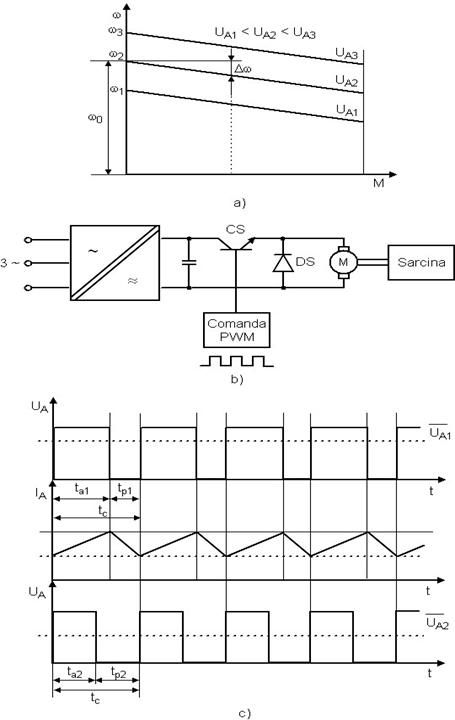
Fig.31 Reglarea vitezei unghiulare a MCC: a) caracteristici mecanice; b) variator detensiune (Chopper); c) comanda in latime a imulsurilor (PWM)
4. ECUATIILE DE FUNCTIONARE A SERVOMOTOARELOR DE CURENT CONTINUU
CARACTERISTICILE MECANICE SI DE REGLAJ
Ecuatiile de functionare a servomotoarelor de c.c. se deduc din ecuatiile masinii electrice generalizate, model DQ -dq.
4.1. Ecuatiile servomotoarelor de c.c. cu excitatia separata
Schema de principiu a servomotorului cu excitatie separata este prezentata in fig.11.
Ecuatiile celor doua circuite, de excitatie si al indusului, se deduc din rel. matriciala 2.85, unde se renunta la liniile si coloanele 1 si 3, iar D si q sunt inlocuite cu e respectiv a.
Se obtin ecuatiile de tensiuni:
ue=(Re+Les)ie
ua=pWMaeie+(Ra+Las)ia (15)
Expresia cuplului electromagnetic se deduce din rel.2.113, unde ID=0,Iq=0. Rezulta:
|
|
|
|
|
ua |
|
ue |
|
S.M |
|
Ra, La |
|
ia |
|
Re Le |
|
W |
|
ie |
 Me=pMaeieia (16)
Me=pMaeieia (16)
Mae este inductanta mutuala dintre infasurarea de excitatie si cea a indusului (Mae=MW
In regim stationar ecuatiile (15) si (16) devin:
Ue=ReIe, Ua=pMaeieia+RaIa,
Me=pMaeieia (17)
Dupa cum se vede din aceste relatii , caracteristicile servomotorului sunt influentate de tensiunile aplicate indusului, Ua, respectiv excitatiei, Ue.
2.1.1. Comanda prin indus
In acest caz tensiunea aplicata infasurarii de excitatie este constanta
Ue=UeN (18)
UeN -fiind tensiunea de excitatie nominala.
Daca se introduce notatia:
keyae=pMaeie (19)
se obtin ecuatiile:
Ue=ReIe,
Ua= keyaW +RaIa,
Me= keyaeIa
Coeficientul de semnal al tensiunii indusului, definit prin
l=Ua/UeN (21)
si introdus in relatiile (20), conduce la ecuatiile:
l UeN=c UeNW + RaIa, Me=c UeNIa, Ie= UeN/Re (22)
unde: c= keyae/UeN este constanta.
Pentru caracteristicilor mecanice si de reglaj in marimi relative se introduc: viteza nominala de mers in gol W , adica vitaza motorului in regimul cand Ua=UeN (l=1), iar cuplul este nul si cuplul nominal de pornire, MpN cand Ua=UeN, iar viteza este nula.
Aceste marimi sunt obtinute din relatiile (22), anume:
W = UeN/ keyae=1/c, MpN=c U2eN/Ra (23)
Marimile reale W si Me se raporteaza la W respectiv MpN, obtinandu-se valorile relative, viteza, respectiv cuplul relativ:
W W n, Me/MpN=m (24)
Ecuatiile (22) devin, dupa impartirea prin UeN si introducerea notatiilor (24),
l n + m sau n l - m (25)
Caracteristicile mecanice in marimi relative n=f(m) la l=ct. si caracteristicile de reglaj al vitezei n=f(l) la m=ct. se reprezinta in fig 12 a, b.
Toate aceste caracteristici sunt liniare si paralele. In practica se constata totusi unele abateri de la liniaritate datorate influentei reactiei indusului, reactiei spirelor in comutatie precum si caderilor de tensiune la perii.
Puterea mecanica (utila) rezulta din bilantul de puteri:
Pm= Pa- RaI2a (26)
Pa - este puterea absorbita de motor, prin indus.
Din relatia (22-1) se deduce:
Ia=UeN(l n)/Ra (27)
iar
Pa=UaIa=U2enl l n)/Ra (28)
Relatia (26) devine:
Pm= U2eN(ln n )/Ra (26`)
Puterea mecanica Pm se raporteaza la puterea absorbita in momentul pornirii:
m l l n n l m=0 m=1
Pap= U2eN/Ra,
Pm/Pap=πm (29)
si rezulta:
πm=ln n (30)
Curbele de variatie ale puterii mecanice relative πm=f(n) se reprezinta in fig. 13. Puterile maxime relative se obtin la viteze obtinute din egalarea cu zero a derivatei
πm`(π)= l n n l (31)
si rezulta:
πmmax=l (32)
Puterea mecanica maxima are, de exemplu, valoarea 1/4 cand l=1 si se obtine pentru n=1/ Randamentul motorului in acest caz este de 50%.
Randamentul se poate obtine ca raport al puterilor Pm si Pa, adica:
h=Pm/Pa=n l (33)
pm n l l l
Pentru un anumit l
randamentul este mai bun pentru viteze mai mari, adica este mai convenabil
sa se lucreze pe portiunea descendenta a caracteristicilor din
fig. 13.
Puterea mecanica relativa, se mai poate exprima si prin relatia:
πm=mn (34)
Astfel, se obtine imediat , din relatia (25)
ln n + mn sau πm= mn ln n (35)
tocmai relatia (30).
ECUATIILE DE FUNCTIONARE A SERVOMOTOARELOR DE CURENT CONTINUU
CARACTERISTICILE MECANICE SI DE REGLAJ
Ecuatiile de functionare a servomotoarelor de c.c. se deduc din ecuatiile masinii electrice generalizate, model DQ -dq.
1. Ecuatiile servomotoarelor de c.c. cu excitatia separata
Schema de principiu a servomotorului cu excitatie separata este prezentata in fig.11.
Ecuatiile celor doua circuite, de excitatie si al indusului, se deduc din rel. matriciala 2.85, unde se renunta la liniile si coloanele 1 si 3, iar D si q sunt inlocuite cu e respectiv a.
Se obtin ecuatiile de tensiuni:
ue=(Re+Les)ie
ua=pWMaeie+(Ra+Las)ia (15)
Expresia cuplului electromagnetic se deduce din rel.2.113, unde ID=0,Iq=0. Rezulta:
|
|
|
|
|
ua |
|
ue |
|
S.M |
|
Ra, La |
|
ia |
|
Re Le |
|
W |
|
ie |
Me=pMaeieia (16)
Mae este inductanta mutuala dintre infasurarea de excitatie si cea a indusului (Mae=MW
In regim stationar ecuatiile (15) si (16) devin:
Ue=ReIe, Ua=pMaeieia+RaIa,
Me=pMaeieia (17)
Dupa cum se vede din aceste relatii , caracteristicile servomotorului sunt influentate de tensiunile aplicate indusului, Ua, respectiv excitatiei, Ue.
2. Comanda prin indus
In acest caz tensiunea aplicata infasurarii de excitatie este constanta
Ue=UeN (18)
UeN -fiind tensiunea de excitatie nominala.
Daca se introduce notatia:
keyae=pMaeie (19)
se obtin ecuatiile:
Ue=ReIe,
Ua= keyaW +RaIa,
Me= keyaeIa
Coeficientul de semnal al tensiunii indusului, definit prin
l=Ua/UeN (21)
si introdus in relatiile (20), conduce la ecuatiile:
l UeN=c UeNW + RaIa, Me=c UeNIa, Ie= UeN/Re (22)
unde: c= keyae/UeN este constanta.
Pentru caracteristicilor mecanice si de reglaj in marimi relative se introduc: viteza nominala de mers in gol W , adica vitaza motorului in regimul cand Ua=UeN (l=1), iar cuplul este nul si cuplul nominal de pornire, MpN cand Ua=UeN, iar viteza este nula.
Aceste marimi sunt obtinute din relatiile (22), anume:
W = UeN/ keyae=1/c, MpN=c U2eN/Ra (23)
Marimile reale W si Me se raporteaza la W respectiv MpN, obtinandu-se valorile relative, viteza, respectiv cuplul relativ:
W W n, Me/MpN=m (24)
Ecuatiile (22) devin, dupa impartirea prin UeN si introducerea notatiilor (24),
l n + m sau n l - m (25)
Caracteristicile mecanice in marimi relative n=f(m) la l=ct. si caracteristicile de reglaj al vitezei n=f(l) la m=ct. se reprezinta in fig 12 a, b.
Toate aceste caracteristici sunt liniare si paralele. In practica se constata totusi unele abateri de la liniaritate datorate influentei reactiei indusului, reactiei spirelor in comutatie precum si caderilor de tensiune la perii.
Puterea mecanica (utila) rezulta din bilantul de puteri:
Pm= Pa- RaI2a (26)
Pa - este puterea absorbita de motor, prin indus.
Din relatia (22-1) se deduce:
Ia=UeN(l n)/Ra (27)
iar
Pa=UaIa=U2enl l n)/Ra (28)
Relatia (26) devine:
Pm= U2eN(ln n )/Ra (26`)
Puterea mecanica Pm se raporteaza la puterea absorbita in momentul pornirii:
m l l n n l m=0 m=1
Pap=
U2eN/Ra, Pm/Pap=πm (29)
si rezulta:
πm=ln n
Curbele de variatie ale puterii mecanice relative πm=f(n) se reprezinta in fig. 13. Puterile maxime relative se obtin la viteze obtinute din egalarea cu zero a derivatei
πm`(π)= l n n l (31)
si rezulta:
πmmax=l (32)
Puterea mecanica maxima are, de exemplu, valoarea 1/4 cand l=1 si se obtine pentru n=1/ Randamentul motorului in acest caz este de 50%.
Randamentul se poate obtine ca raport al puterilor Pm si Pa, adica:
h=Pm/Pa=n l (33)
pm n l l l
Pentru un anumit l randamentul este mai bun pentru viteze mai mari,
adica este mai convenabil sa se lucreze pe portiunea
descendenta a caracteristicilor din fig. 13.
Puterea mecanica relativa, se mai poate exprima si prin relatia:
πm=mn
Astfel, se obtine imediat , din relatia (25)
ln n + mn sau πm= mn ln n (35)
tocmai relatia (30).
3. Comanda prin excitatie
Tensiunea aplicata indusului ramane constanta Ua=UaN, in timp ce tensiunea aplicata infasurarii de excitatie, deci si curentul de excitatie, este variabil.
Coeficientul de semnal in tensiune este:
l=Ue/UaN (36)
Din ecuatiile (17) se obtin relatiile:
l UaN=ReIe, UaN=pWMael UaN/Re + RaIa, Me= pMael UaNIa/Re (37)
Facand notatia:
pMae/Re=W =1/c (38)
se obtine a doua ecuatie din (37), sub forma
UaN=c Wl UaN + RaReMeUAn/ pMaelU2aN, 1=ln + m/l (39)
Unde cuplul de pornire se obtine pentru l=1 si W=0, adica
Mp= pMaeU2aN/RaRe (40)
Caracteristicile mecanice n=f(m) pentru l=ct. se deduc din relatia (39)
n l) - (m/l (41)
In fig.14 se reprezinta dependentele n=f(m) pentru diversi l
Caracteristicile de reglaj ale vitezei n=f(l) pentru m=ct. se obtin de asemenea din relatia (39) si sunt reprezentate in fig. 1Dependentele n=f(l) pentru m=ct. sunt neunivoce, adica exista pentru un anumit cuplu constant pe arbore, doua valori ale lui l (deci doua valori pentru tensiunea de excitatie), la care viteza de rotatie relativa n are aceeasi valoare impusa. Acest fapt constituie un dezavantaj al comenzii prin excitatie, fata de comanda prin indus.
Puterea mecanica relativa se deduce dupa relatia (34) si are expresia:
πm=nl n l (42)
In fig.16 se reprezinta dependenta πm=f(n) la l=ct.
Indiferent de l, puterea mecanica relativa trece printr-o aceeasi valoare maxima: 0,2
n m n l πm n
Comanda prin
excitatie se utilizeaza in special la putere constanta.
O varianta a comenzii prin excitatie se obtine daca indusul servomotorului se alimenteaza de la o sursa de curent constant; caz in care se utilizeaza in circuitul indusului surse electronice de alimentare cu bucla de curent constant.
In concluzie, comanda prin indus prezinta unele avantaje imporatnte in raport cu comanda prin excitatie: reglaj al vitezei in limite largi cu posibiulitatea reversarii sensului, caracteristici mecanice liniare si univoce, constanta de timp a comenzii mica, etc., fapt care o impune mai ales in automatizari pretioase.
6. ECUATIILE SERVOMOTORULUI DE CURENT CONTINUU CU EXCITATIE SERIE
6.1. Generalitati
Servomotorul de c.c. cu excitatie serie se utilizeaza la unele actionari industriale unde se cere cuplul mare de pornire, la demararea motoarelor termice, la actionarea unor cursoare de reostate in cseme de automatizare, la stergatoarele de parbriz, etc.
Extinderea folosirii sale in sisteme automate este limiata de incapacitatea modificarii sensului de rotatie odata cu schimbarea polaritatii tensiunii de comanda si de faptul ca, in general, caracteristicile mecanice si de reglaz nu sunt liniare.
Ex 1 Ex 2 M M Ex
Schimbarea sensului de
rotatie al servomotoarelor serie se poate realiza daca se
utilizeaza scheme cu diode fig.17.
In figura 17 a, servomotorul are doua infasurari de excitatie serie, fiecare din ele corespunde la cate un sens de rotatie. Schimbarea polaritatii tensiunii de alimentare duce la modificarea curentului prin indus, fluxul pastrandu-si sensul. In fig.17b, servomotorul poseda o singura infasurare se excitatie alimentata printr-o punte cu diode Schimbarea polaritatii tensiunii de alimentare modifica numai sensul curentului prin indus.
6.2.Ecuatia servomotorului cu excitatie serie
IA iD iq M IA UA wR
In fig.18 este prezentata schema servomotorului cu
excitatie serie dedusa din schema masinii electrice
generalizate, la care lipsesc periile din axa d rotorica si
infasurarea statorica din axa Q.
In regim stationar exista relatiile:
id=0, iQ=0, iD=-iq=IA,s=0
-uq+uD=UA, uD=0, uD=Ue, wR=pW (43)
R=Ra, RD=Re, RA=Re+Ra, MD=Mae
Se obtin astfel ecuatiile de tensiuni si expresia cuplului:
Ue=ReIA, UA=pW Mae+RAIA
Me=pMaeI2A (44)
Folosind notatia p Mae=k e, se obtin ecuatiile:
UA= RAIA+ k eWIA, Me= k eI2A (45)
Cand viteza unghiulara W este nula si tensiunea aplicata servomotorului este cea nominala UA=UAN se obtin: curentul de pornire si respectiv cuplul de pornire nominal, adica:
IAp=UAN/RA; MpN= k eU2AN/R2A (46)
Deoarece viteza de mers in gol ideal al servomotorului (cand iA=0), este necesara raportarea vitezei la o alta valoare la o alta valoare, anume la aceea pe care o poseda servomotorul cand curentul prin indus este egal cu jumatate din valoarea sa la pornire. Aceasta consecinta este realista si dupa, cum se va vedea in continuare, corespunde chiar situatiei cand puterea mecanica a motorului este maxima. asadar, viteza servomotorului se va raporta la aceasta valoare care se ia drept marime de referinta WN
WN=(UAN-RAIA/2)/ (k eIAp/2) (47)
Se introduc in rel. (45): cuplul relativ, viteza relativa, respectiv coeficientul de semnal de tensiune, adica:
m=Me/MpN, n W WN l=UA/UAN (48)
si se obtine ecuatia in marimi relative a servomotorului comandat in tensiune:
l=m1/2+n m1/2 (49)
In fig.19a, se reprezinta familia de caracteristici mecanice n=f(m) pentru diversi l (diverse tensiuni UA aplicate).
Curbele A, B si C arata ca, odata cu micsorarea tensiunii aplicate, variatia de viteza, pentru o anumita variatie a cuplului, este di ce in ce mai pronuntata.
De asemenea, caracteristicile mecanice sunt mult mai inclinate decat in cazul servomotoarelor cu excitatie separata (dreapta D, pentru l
l n n m l l l m=1 m=1/2 m=1/4 m=1/16
In fig.19b, se
reprezinta caracteristicile de reglaj al vitezei, la cuplu constant, n=f(l)
pentru m=ct., deduse din ecuatia (49). Toate aceste drepte trec prin
punctul caracterizat de l n= - 1. Pentru m=1 panta devine 1 egala cu cea
din cazul servomotorului cu excitatie separata.
Pentru a analiza dependenta puterii mecanice (de viteza de rotatie) se introduce valoarea sa relativa
πm=Pm/PAp (50)
unde PAp este puterea absorbita de motor de la retea in momentul pornirii, PAp=U2AN/RA, la W
Puterea mecanica se obtine din bilantul de puteri (26) sau direct din relatia (49), anume
m= l n)]2; m=l n)2; mn= πm=l n n (51)
pm
![]()
In fig.20 este
reprezentata familia de caracteristici πm=f(n)
pentru diversi l. Se constata ca puterea mecanica
trece totdeauna prin valoarea maxima la n=1.
Se justifica astfel faptul ca marimea de referinta
aleasa pentru viteza motorului corespunde situatiei,
|
n |
|
|
|
|
|
l |
|
l |
|
l |
|
|
|
|
 |
cand puterea mecanica a motorului este maxima. valorile maxime ale puterii mecanice sunt proportionale cu patratul coeficientului de semnal. Maximul puterii mecanice relative este 1/4 pentru l=1 si corespunde la o valoare a curentului absorbit egala cu jumatatea curentului de pornire nominal.
Exista situatii in practica, de exemplu la instalatii de ridicat, care impun folosirea servomotoarelor serie capabile sa furnizeze cupluri de valori diferite sau sa realizeze viteze de rotatie diferite pentru cele doua sensuri. In aceste cazuri se adopta decalarea periilor din axa neutra, cu un unghi a. Aceasta decalare se mai impune si din motive de ameliorare a comutatiei, intrucat peste componenta continua se suprapune si o componenta alternativa a curentului, mai ales cand masina se alimenteaza de la redresoare comandate, regimul fiind mai greu decat in cazul alimentarii de la acumulatoare, de exemplu.
a iA=ie M W iA id ud iq uq id uD
Schema servomotorului cu excitatie serie, avand periile decalate
din axa neutra, este data in fig.21a. Masina reala se poate
inlocui cu un model de masina generalizata, fig.21b, avand
doua perechi de perii situate in cele doua axe d si q;
tensiunile si curentii prin infasurarile rotorului
fiind obtinute ca proiectii, ale tensiunii, respectiv curentului prin
periile reale.
Relatiile de legatura intre marimile care intervin in fig.21a si 21b sunt:
iq=-iA cos a, iA=-iA sin a, uq=-ua cos a, ud=-ua sin a
uq= cos a + ud sin a = -ua, iD=iA=ie (52)
Ecuatiile modelului din fig.21b in care se renunta la linia si coloana a doua. In regim stationar se obtin ecuatiile:
UD=RDID sau Ue=ReIA
Uq= -pWMDID + RaIq - pWLdId
Ud=pWlqID + RaId (53)
Me=p[-MDIDIq + (Lq - Ld) IDIq ] (54)
Inmultind a doua ecuatie din (53) cu cos a si pe atreia cu sin a si adunandu-le membru cu membru, se obtine:
Uq sina +Ud sin a= -pWMDID cos a +RaIq cos a - pWLdId cos a + pWLqIDsin a RaId sina = = RaIA - pWMDIe cos a + pW[(Ld - Lq)/2]IA sin 2a (55)
S-a tinut seama si de rel (53). Expresia () a cuplului devine:
Me=pMDIeIA cos a - p[(Ld - Lq)/2] I2A sin 2a (56)
Din aceste relatii se pot deduce si ecuatiile in marimi relative.
Din expresia (56) se deduc urmatoarele:
In cazul decalarii periilor fata de axa neutra cu un unghi a<900 in sens invers rotirii rotorului, cuplul motorului cuprinde:
a) un prim termen proportional cu produsul dintre curentul prin indus, curentul prin infasurarea de excitatie precum si cosinusul unghiului de decalaj,
M1=pMDIeIA cos a = pMDI2A cos a. Ie=IA (57)
b) un al doilea termen proportional cu patratul curentului IA si sinusul dublului unghiului de decalaj, 2a
M2=p[(Ld - Lq)/2] I2A sin 2a (58)
La decalarea periilor in sens invers rotirii rotorului, cuplul rezultant Me se obtine ca diferenta a acestor doua cupluri, iar la decalarea periilor in sensul rotirii rotorului, cuplul rezultant se obtine ca suma a acestor doua cupluri.
Cuplul M2 depinde de diferenta inductantelor masinii pe cele doua axe, Ld - Lq, deci de diferenta dintre reluctantele magnetice pe axele respective.
Pentru o masina cu stator neted cuplu M2 este nul, iar cuplul rezultant este dat de relatia (43). Valoarea acestui cuplu este dependenta de unghiul a. In cazul masinilor cu poli aparenti pe stator, se poate obtine un cuplu diferit de zero, chiar si in conditiile inexistentei infasurarii de excitatie (Ie = 0), daca periile sunt decalate din axa neutra cu un unghi a
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3424
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved