| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Implicatia productivitate-timp de ciclu, conduce la limitarea inferioara a vitezelor si acceleratiilor maxime de lucru, tradusa prin viteze medii la nivelul manipularii reperelor, viteze cuprinse intre 0.4m/s si 1.5m/s.
Metoda clasica de analiza cinematica si cinetostatica a mecanismelor utilizate in constructia manipulatoarelor si robotilor industriali, prin descompunerea in grupe assurice, se bucura de succes deoarece permite o abordare modulara, calculul se face grafic sau analitic, realizandu-se programe de calcul pentru fiecare grupa structurala.
Abordarea modulara, reduce numarul de ecuatii de rezolvare, insa are o serie de deficiente legate de faptul ca numarul grupelor structurale este nelimitat, fiecare grupa poate avea aspecte diferite, limitand generalitatea metodei. In acest sens, pentru fiecare mecanism este necesar un studiu pentru determinarea relatiei structurale, actualizarea parametrilor formali ai fiecarei subrutine, realizarea programului apelant al subrutinelor (analiza cinematica se face in sensul relatiei structurale din calculul reactiunilor).
In analiza cinematica prin elaborarea metodei ciclurilor independente s-a deschis drumul utilizarii proprietatilor grafurilor in acest domeniu, usurand astfel procesul de analiza a structurilor complexe.
Metoda permite determinarea distributiei de viteze si de acceleratii pe cale analitica.
Metoda are la baza doua tipuri de formule:
-formula Euler care leaga vitezele si acceleratiile a doua puncte de pe acelasi element:
![]()
![]()
unde:
![]() este viteza respectiv
acceleratia absoluta fata de un sistem fix a punctului B de pe corpul
i;
este viteza respectiv
acceleratia absoluta fata de un sistem fix a punctului B de pe corpul
i;
In scopul determinarii simultane a vitezelor unghiulare si liniare, analiza cinematica utilizeaza vectorii duali de viteza si acceleratie.
Vectorul dual de viteza si respectiv, de acceleratie, se defineste ca fiind matricea de tip coloana care cuprinde viteza unghiulara si liniara, respectiv acceleratia unghiulara si liniara. Acesta se va exprima astfel
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Tinand cont de relatiile Euler vom putea scrie relatia de trecere prin translatie din sistemul cartesian A in B:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
unde:
![]() -matricea unitate;
-matricea unitate;
![]() -matricea antisimetrica a vectorului AB
-matricea antisimetrica a vectorului AB
![]() -matricea de tip zero;
-matricea de tip zero;
Matricea antisimetrica AB provine din produsul vectorial ![]() .
.
Matricea coloana a produsului vectorial este:
deci se poate exprima prin:
![]()
![]()
![]()
0 z -y wx
-z 0 x wy
y -x 0 wz
In final se poate scrie relatia care exprima matricial produsul vectorial
![]()
Deci matricea de translatie generala din punctul i in j este
Tinand cont ca in cazul rotatiei sistemelor cartesiene
se modifica versorii axelor, putem scrie relatiile de trecere a
vectorilor ![]() si
si ![]() din punctul A in
punctul B:
din punctul A in
punctul B:
relatie care matricial se poate rescrie:
Deci matricea de transfer prin rotatie se poate defini:
unde matricile de tip ![]() au fost deja definite.
au fost deja definite.
Matricea de rototranslatie se obtine prin inmultirea matricilor de translatie cu cele de rotatie:

Deci matricea generala de rototranslatie este:
In scopul determinarii relatiei generale de recurenta pentru efectuarea analizei de viteze vom analiza un sistem articulat cu n corpuri mobile conform fig.1.
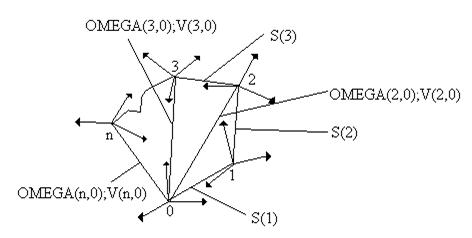
Fig. 1.
Vom defini vectorul dual de viteza relativa de forma:
exprimat fata de sistemul cartesian propriu.
In cadrul determinarii relatiei vectorilor duali de viteza vom tine seama ca toti vectorii asupra carora actioneaza un anumit operator, sa fie exprimati fata de un acelasi sistem cartesian.
Deci, relatia de recurenta pentru determinarea vectorului dual de viteza absoluta a corpului i, exprimata fata de sistemul cartesian propriu va fi:

unde:
S'(i)-este vectorul dual de viteza relativa
T-este matricea de trecere dintr-un sistem cartesian in altul;
Se observa ca, in cazul analizei de viteze, trecerea dintr-un sistem cartesian in altul se face pornind de la baza catre ultimul element al lantului cinematic respectiv mana mecanica.
In scopul determinarii vectorului absolut de viteza unghiulara sau liniara al unui corp, exprimat fata de sistemul de coordonate al corpului considerat fix, se aplica relatia:
Daca consideram o structura cu i corpuri mobile cuprinse intr-un lant cinematic inchis, relatia de recurenta pentru analiza de viteze devine:

Pentru structuri cu mai multe lanturi cinematice inchise, analiza cinematica de viteze se va efectua pentru fiecare contur inchis al lantului cinematic.
Sa luam de exemplu o structura articulata cuprinzand doua lanturi cinematice inchise al carui graf poate fi urmarit in figura 2.
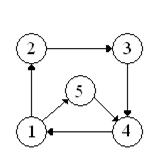
Fig. 2
unde:
Pentru determinarea relatiei de recurenta utilizata in analiza cinematica de acceleratii este necesara determinarea relatiei vectorului dual de acceleratie relativa S"(i).
In acest scop scriem relatia intre viteza absoluta si viteza relativa la nivelul unui corp i:
![]()
Dupa aplicarea derivatei vectorului viteza si tinand cont de relatia existenta intre derivata unui vector fata de un sistem cartesian fix si fata de un sistem cartesian mobil, obtinem:

iar dupa inlocuirea vectorului absolut de acceleratie
![]()
si reducerea termenilor asemenea obtinem:
![]()
Tinand cont de relatiile de transformare ale produselor vectoriale, scriind relatiile scalare, obtinem:
![]()
Tinand cont de relatia precedenta, de relatia intre acceleratia absoluta si relativa si de transformarea de tip translatie, putem scrie in final:

unde expresia:
![]()
reprezinta vectorul dual de acceleratie relativa a corpului i fata de precedentul.
Relatiile de recurenta, pentru cazul analizei de acceleratii, ale lanturilor cinematice inchise, cu unul sau mai multe cicluri, sunt identice cu cele din cadrul analizei cinematice de viteze, cu deosebirea utilizarii vectorilor duali de acceleratie relativa determinati anterior.
Relatia de recurenta pentru determinarea acceleratiilor poate fi exprimata astfel:

Pentru studiul comportarii dinamice a structurilor articulate deschise si inchise se utilizeaza acceleratiile si vitezele liniare si unghiulare absolute, exprimate fata de sistemul de referinta considerat fix.
In acest scop, toate vitezele si acceleratiile determinate in cadrul analizei cinematice vor trebui reduse la sistemul de referinta fix. Vom utiliza relatii de forma:
unde:
![]() este matricea
generala de transfer a vectorilor din sistemul cartesian i in sistemul
cartesian fix, 0.
este matricea
generala de transfer a vectorilor din sistemul cartesian i in sistemul
cartesian fix, 0.
Aceste matrici au fost deja determinate la analiza de pozitie si reprezinta matricile generale de transfer al unui vector dintr-un sistem cartesian in altul.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1233
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved