| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
UNIVERSITATEA
DIN
FACULTATEA DE INGINERIE MANAGERIALA SI TEHNOLOGICA
CALCULUL SI CONSTRUCTIA AUTOVEHICULELOR
Echipamente electronice pentru imbunatatirea securitatii active si pasive a autovehiculelor
Initial, aceste concept s-a referit la siguranta ocupantilor din habitaclul automobilului, extinzandu-se apoi si la siguranta celorlalti participanti la trafic. Un automobil sigur este, in conceptul modern, un autovehicul care ofera securitate sporita atat ocupantilor habitaclului cat si pietonilor in caz de accident. Ajungem astfel la sistemele de siguranta. Specialistii le-au clasificat in doua sisteme: sistemele de siguranta pasiva si sistemele de siguranta activa.
Siguranta activa a autovehiculului reprezinta actiunea constructorului care urmareste imbunatatirea calitatii autovehiculului referitoare la evitarea producerii accidentelor de circulatie rutiera. Aceasta siguranta se obtine prin realizarea sistemului de directie, de franare, de rulare, de iluminare si semnalizare cu o fiabilitate maxima.
Siguranta pasiva reprezinta actiunea constructorului care urmareste diminuarea urmarilor accidentelor de circulatie rutiera chiar in timpul producerii acestora. In cadrul acestor actiuni se are in vedere evitarea accidentarii grave sau mortale a ocupantilor locurilor din autovehicul prin utilarea interiorului caroseriei cu piese si materiale usor deformabile la soc, testarea fixarii centurilor de siguranta, a tetierelor, dinamicitatea, fiabilitatea si comportarea diferitelor subansambluri in regimuri de exploatare severe etc.
I. Siguranta activa
Din cadrul sistemelor de siguranta activa a autovehiculelor amintim: sisteme de franare cu dispozitive de antiblocare a rotilor - ABS, dispozitive antipatinare - ASR (controlul tractiunii), controlul dinamic al stabilitatii - ESP, sistemul de iluminare.
 Sistemul
ABS
Sistemul
ABS
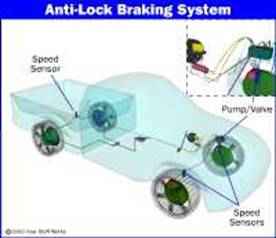
ABS este denumirea prescurtat din termenul englezesc Antilock Braking System si inseamna in traducere libera Sistem Antiblocare la Franare. Sistemul pe scurt impiedica blocarea rotii atunci cand masina este franata. ABS-ul a fost inventat si folosit pentru prina oara in aviatia la avioane pentru a reduce distanta de franare si pentru a pastra directia chiar daca se frineaza e suprafete alunecoase. De la avioane a fost preluat de catre Mercedes si introdus pentru prima oara pe o masina de serie in anii '80 pe clasa S. Mercedes este unul din producatorii auto care tine aproape de tehnologia militara si cea aviatica. De-a lungul timpului au introdus sisteme in premiera care au fost preluate din aceste domenii.
ABS-ul este necesar dearece eficienta
franarii este foarte strans legata de coeficientul de frecare dintre roata si
suprafata de teren pe care evolueaza. Daca nu exista frecare sau daca aceata
este foarte mica, franare nu se produce. Pe suprafetele alunecoase in momentul
franarii roata se blocheaza si atunci se pierde aderenta cu suprafata de
rulare, iar comportamentul masinii nu mai poate fi controlat. Daca reusim sa nu
blocam roata, reusim sa controlam comportamentul ei. Acesta este lucrul
important care a dus la dezvoltarea ABS-ului.
De ABS se leaga functionarea a foarte multe sisteme cum ar fi: sistemul de
control al stabilitatii (DSA, ESP, etc), sistemul de control al tractiunii
(ASR), sistemul de control al vitezei si de limitare al vitezei (CRUISE
CONTROL) etc.
Istoric vorbimd exista mai multe sisteme ABS clasificate dupa mai multe criterii: sistem ABS cu doua, trei sau patru canale; sistem ABS de generatia II, II, IV sau V.
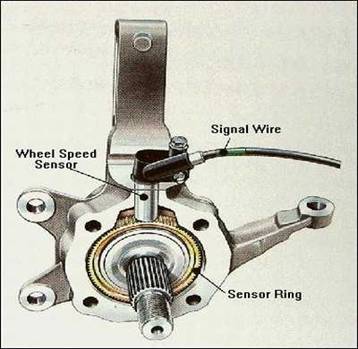
Prima clasificare se refera la numarul de senzori de turatie care sunt plasati pe rotile masinii. Cele cu 2 canale aveau plasati doar 2 senzori pe rotile din fata sau un senzor pe roata fata dreapta si unul pe roata fata stanga, cele cu trei canale aveau 2 senzori pe rotile fata si un senzor pe puntea spate care monitoriza toata puntea, iar cel cu 4 canale are 4 senzori, fiecare din senzori monitorizand cite o roata. Cel mai raspindit la ora actuala este sistemul cu 4 canale, iar la el s-au dezvoltat mai multe generatii in funtie de tipul de pompa si unitate de procesare.
Principiul de functionare
Fiecare senzor monitorizeaza cate o roata si cand sesizeaza ca aceasta nu se mai invarte trimite semnal la calculator, care slabeste stangerea pe care o exercita placutele de frana asupra discului sau tamburului permitand rotii sa se invarta si astfel sa-si pastreze aderenta dupa care cand sesizeaza din nou miscare placute se strang din nou pe disc sau tambur franand roata. Daca senzorul sesizeaza din nou blocarea rotii se reia procesul. Dupa cum se vede procesul este unul pulsatoriu, iar pe anumite intervale de timp pulsatiile sunt neregulate. Fiecare etier de frana este comandat hidraulic printr-o conducta separata care vine din unitatea centrala de control. Avand cite un senzor pe fiecare roata si fiecare roata fiind comandata separat, atunci fiecare roata este controlata individual si poate avea comportament diferit. De ex: daca senzorul de ESP sesizeaza in timpul unei franari ca masina are tendinta de a se roti in jurul axei proprii datorita unor forte care apar, el va comanda frinarea rotilor din fata si spata pe diagonala astfel incit sa creeze un cuplu de forte de sens contrar celui care a destabilizat masina astfel anuland acel cuplu si restabilind traiectoria masinii
 Senzorii
trimit semnale sub forma de impulsuri la unitatea centrala de control. In
unitatea centrala de contrul exista un computer si o serie de electrovalve care
camanda fiecare deschiderea sau inchiderea conductei care alimenteaza cu lichid
de frana etierul rotii. Tot in aceasta unitate de comanda exista o pompa
hidraulica care are rolul de a produce presiune in sistem.
Senzorii
trimit semnale sub forma de impulsuri la unitatea centrala de control. In
unitatea centrala de contrul exista un computer si o serie de electrovalve care
camanda fiecare deschiderea sau inchiderea conductei care alimenteaza cu lichid
de frana etierul rotii. Tot in aceasta unitate de comanda exista o pompa
hidraulica care are rolul de a produce presiune in sistem.
Sistemul fuctioneaza astfel: la apasarea pedalei de frina se actioneaza in mod direct asupra etierului si incepe rocesul de franare. In functie de informatiile primite de la senzori electrovalvele blocheaza conductele de franare si nu mai permit lichidului sa circule catre etier, in aceste fel etierul nu mai este sub presiune si sistemul se deblocheaza. Odata cu blocarea conductei de alimentare a etierului de deblocehaza un circuit de retur al lichidului. Totul se intimpla la nivel de unitate centrala si este controlat automat de computer in funtie de: forta de apasare a pedalei de frina, de cit timp este mentinuta pedala de frina si de informatiile primite de la senzori sau de la alte sisteme ale masinii. La sistemele de generatie mai noua un parametru important de care tine seama computerul de ABS este viteza cu care se apasa pedala de frana. In feleul acesta el sesizeaza situatiiele de urgenta si atunci cand viteza de apasare a pedalei este mare computerul mentine si mareste presiunea in instalatia de franare pentru perioada chiar daca s-a luat piciorul de pe frana. Acesta este sistemul BAS Brake Assistant System in traducere Sistem de Asistare la Franarea de Urgenta.
Sistemul ESP
Unul dintre cele mai importante sisteme de siguranta din domeniul auto, cunoscut de cei mai multi sub numele de ESP, devine din ce in ce mai mult o obisnuinta a masinilor zilelor noastre, dar pretul inca mare si lipsa informatiilor pentru marele public fac ca raspandirea sistemului sa nu fie semnificativa.
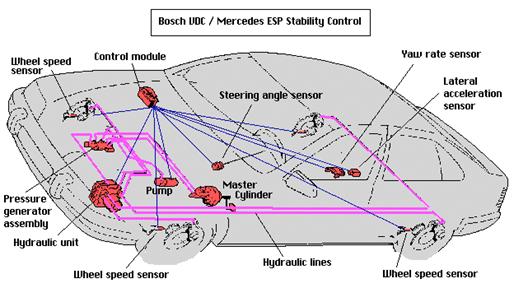
Denumirea tehnica a sistemului este ESC, adica Electronic Stability Control, denumire ce sugereaza destul de bine utilitatea sa. Faptul ca cele mai multe astfel de sisteme instalate pe autovehicule sunt fabricate de Bosch a determinat insa popularizarea sa sub numele ESP, cel pe care producatorul de dispozitive electronice auto l-a instituit inca din 1987, cand a inceput sa-l dezvolte alaturi de Mercedes-Benz.
Si BMW a creat cam in aceeasi perioada un Sistem de Control al Tractiunii care avea acelasi rol. Din punctul de vedere al echiparii modelelor de serie, putem vorbi despre o noua similitudine, anul 1992 fiind cel in care atat Mercedes, cat si BMW au introdus ESP-ul, ambele fiind realizate cu ajutorul companiei Robert Bosch GmbH, cea care si-a inregistrat marca ESP.
De altfel, in 1995 Bosch a creat primul ESP complet, pus la dispozitia producatorilor de autovehicule.
Functionarea ESP ( ELECTRONIC STABILITY CONTROL )
Electronic Stability Control este de fapt un sistem destul de inteligent, care lucreaza insa integrat cu dispozitivele electronice computerizate ce controleaza un automobil.
Respectand legile ciberneticii, ESC-ul foloseste ca surse de informatii o serie de senzori amplasati pe diferite componente dinamice ale unui vehicul. In acest fel, in fiecare moment sunt cunoscute viteza de rotatie a fiecarei roti, directia imprimata de volan si masura in care caroseria masinii respecta intocmai aceasta directie.
Pentru componenta de tractiune exista si sisteme mai simple care doar impiedica una sau mai multe roti sa derapeze. Un ESC integrat va verifica nu doar diferentele dintre viteza unghiulara a rotilor, ci si deplasarea laterala a masinii. Timpul de raspuns este de obicei de ordinul milisecundelor, astfel ca interventia poate fi considerata destul de prompta. Numai pentru tractiune, actiunea se rezuma la impiedicarea rotii/rotilor care patineaza sa se mai invarta, astfel fiind posibil un control al directiei, similar cu ceea ce face un ABS la franare. In cazul ESC, in clipa in care se constata derapajul masinii, sistemul proceseaza informatiile si actioneaza acolo unde trebuie: franele intervin pe una sau mai multe roti, individual, pentru a corecta traiectoria, iar motorul este impiedicat sa mai genereze cuplu, eliminandu-se astfel fortele care au generat deplasarea.
De exemplu,
daca rotile din fata incep sa derapeze in timpul virajului, producand ceea ce
numim subvirare (deplasarea catre exteriorul curbei), ESC franeaza roata spate
de pe interior, astfel ca traiectoria se corecteaza. Daca derapeaza rotile din spate, adica
masina supravireaza (incepe sa se rasuceasca spre interiorul curbei), ESC
franeaza roata fata din exterior, ajustand traiectoria. De fiecare data
acceleratia este redusa automat pana la atingerea scopului. Simultan, la bordul
vehiculului se aprinde intermitent becul corespunzator ESC, care avertizeaza
soferul ca sistemul se afla in plin proces de functionare. Aproape orice
vehicul dotat cu ESC permite decuplarea acestuia de la un buton, becul-martor
fiind aprins in acest caz permanent. Decuplarea ESC este utila, de exemplu, in
cazul vehiculelor 4x4 care au de depasit un obstacol dificil, functionarea
sistemului fiind de natura sa reduca puterea motorului si sa impiedice
deplasarea. Suprafetele pe care poate fi observata cu usurinta interventia
sistemului de control al stabilitatii sunt asfaltul ud si zapada/gheata.
Denumiri multiple pentru ESP - ELECTRONIC STABILITY CONTROL
 In ultimii ani,
toti producatorii si-au achizitionat sau creat propriile sisteme de control al
stabilitatii, denumirile acestora diferind de la o marca la alta. Uneori si functionarea si eficienta lor
difera, insa existenta unui astfel de sistem pe masina este mult mai importanta
pentru siguranta pasagerilor decat numele sub care este comercializat. Costul
unui ESC poate afecta pretul final al masinii, fiind situat intre 500 si 600
euro si chiar 1.000-1.500 euro, insa poate fi considerata o investitie mult mai
importanta decat cea in aerul conditionat automat sau intr-o vopsea metalizata.
Dintre marcile care utilizeaza altceva decat ESP, putem nota Mitsubishi, cu
Active Stability Control (ASC), Volvo - Dynamic Stability and Traction Control
(DSTC), Mazda si BMW - Dynamic Stability Control (DSC), Honda - Electronic
Stability Control (ESC).
In ultimii ani,
toti producatorii si-au achizitionat sau creat propriile sisteme de control al
stabilitatii, denumirile acestora diferind de la o marca la alta. Uneori si functionarea si eficienta lor
difera, insa existenta unui astfel de sistem pe masina este mult mai importanta
pentru siguranta pasagerilor decat numele sub care este comercializat. Costul
unui ESC poate afecta pretul final al masinii, fiind situat intre 500 si 600
euro si chiar 1.000-1.500 euro, insa poate fi considerata o investitie mult mai
importanta decat cea in aerul conditionat automat sau intr-o vopsea metalizata.
Dintre marcile care utilizeaza altceva decat ESP, putem nota Mitsubishi, cu
Active Stability Control (ASC), Volvo - Dynamic Stability and Traction Control
(DSTC), Mazda si BMW - Dynamic Stability Control (DSC), Honda - Electronic
Stability Control (ESC).
Derapajul - cauza accidentelor
 Comisia UE a
anuntat intentia de a impune folosirea obligatorie a sistemului de stabilitate
incepand cu 2011, in timp ce in SUA a fost deja adoptata o lege care prevede ca
includerea ESP in dotarea-standard a tuturor autoturismelor este obligatorie
incepand cu anul de fabricatie 2012.
Comisia UE a
anuntat intentia de a impune folosirea obligatorie a sistemului de stabilitate
incepand cu 2011, in timp ce in SUA a fost deja adoptata o lege care prevede ca
includerea ESP in dotarea-standard a tuturor autoturismelor este obligatorie
incepand cu anul de fabricatie 2012.
Aceste decizii nu sunt intamplatoare, avand in vedere ca studiile asupra
accidentelor rutiere demonstreaza ca cel putin 40% din totalul celor soldate cu
decese sunt cauzate de deraparea autovehiculelor si, mai mult, aproximativ 80%
din totalul acestor accidente ar fi putut fi evitate prin utilizarea sistemului
ESP. Potrivit cercetatorilor de la Universitatea Kln, in Europa ar fi putut fi
evitate, in 2007, prin folosirea pe scara larga a ESP, un numar de 4.000 de
decese si 100.000 de raniti. Autoritatea rutiera a SUA, NHTSA, apreciaza ca
prin folosirea ESP s-ar putea evita 10.000 de decese pe soselele SUA.
Sistemul AFU
AFU, sistemul Asistare de Franare de urgenta este extrem de precis in caz de pericol si mai ales atunci cand conditiile de aderenta se degradeaza. Functia sa este aceea de a asista soferul in cazul unei franari dificile.
Daca AFU va determina daca forta de apasare a franei nu este suficienta si o va creste pentru a acoperi lipsa detectata.
In cazul unei situatii de urgenta numerosi soferi nu exercita instantaneu o presiune suficienta pe pedala de frana. Sistemul de asistare de urgenta accentueaza franarea in functei de viteza de apasare a pedalei de frana. AFU permite atingerea aproape instantanee a presiunii de franare maxime.
Alerta la depasirea involuntara a liniei de marcaj - AFIL
Alerta la depasirea involuntara a liniei
de marcaj (AFIL) este un nou sistem de asistare a condusului detectand o
schimbare de banda neintentionata, pe autostrada sau pe sosea nationala si
pornind de la viteza de 80 km/h. 
Acest sistem intra in actiune atunci cand soferul, distrat, schimba banda de mers sau fara o semnalizare prealabila.
Principiul de functionare este urmatorul: atunci cand marcajul la sol este depasit (linia continua sau discontinua) si cand semnalizatorul nu este actionat, senzorii infrarosii ai sistemului AFIL, implantati in bara de protectie fata, detecteaza anomalia si calculatorul previne soferul. Acesta din urma este alertat prin declasarea unui sistem de vibratii situat scaunul sau, pe partea corespunzatoare depasirii liniei. Astfel soferul poate corecta traiectoria.
Sistemul AFIL poate fi activat printr-un push situat pe plansa centrala. Starea este memorata la oprirea vehiculului.
Mai exact pentru a detecta banda sase senzori pe baza de infrarosu se afla sub bara de protectie fata a masinii, cate trei de fiecare parte. Fiecare dintre ei regrupeaza o dioda ce emite infrarosii si o celula de detectare. Variatiile de reflectie ale fasciculului de infrarosii emise de catre dioda se afla pe sosea asigurand detectarea.
Gradul de sofisticare al senzorilor permite detectarea la fel de bine a benzilor albe cat si a celor galbene, rosii sau albastre, care semnaleaza benzile provizorii in unele tari europene. Sistemul este de asemenea capabil sa faca distinctia intre marcajul longitudinal (continu sau discontinu) si alte tipuri de marcaje la sol: sageti inscriptionate (mai putin cele speciale neomologate).
Alerta la depasirea involuntara a liniei de marcaj permite avertizarea soferului in caz de schimbare neintentionata a benzii.
Adaptive Cruise Control
Sistemul Adaptiv Cruise Control (ACC) dezvoltat de Bosch vine in ajutorul soferului, fiind capabil sa recunoasca un autovehicul care ruleaza inaintea sa, sa-i inregistreze viteza si sa mentina o distanta de siguranta fata de acesta, cu ajutorul sistemului de franare si managementului motorului.
Precedentele sisteme au fost dezvoltate pentru viteze mai mari de 30 km/h, iar in viitor vor putea fi utilizate si la viteze mai mici. Noul ACC pastreaza distanta de siguranta in raport cu autovehiculul din fata, chiar la viteze mici si franeaza automat pana la oprirea definitiva, in conditii de trafic 'bara la bara'. Cand masina din fata se pune in miscare, soferul este atentionat, fie printr-un semnal optic, fie - in functie de aplicatie - printr-un semnal sonor. Decizia de demarare in cazul unei opriri complete a autovehiculului apartine soferului. Daca acesta doreste sa urmeze masina din fata sa, trebuie doar sa actioneze ACC-ul sau sa apese pedala de acceleratie.
Un alt produs Bosch asteptat in viitor este ACC Full Speed Range (FSR). Sistemul proceseaza atat semnale provenite de la senzorii unui radar cu raza mare de actiune, cat si informatii de la camera de luat vederi, iar uneori de la un radar cu raza mica de actiune. Aceste functii permit folosirea lui ACC FSR pentru traficul urban. Informatiile aditionale provenite de la camera de luat vederi permit demararea automata a autovehiculului, fara a mai fi nevoie de actiunea soferului, odata ce masina dinaintea sa a plecat de pe loc. Din motive legale, functia este activa doar o perioada scurta de timp - aproximativ 10 secunde de la oprirea masinii. Dupa expirarea perioadei, soferul demareaza fara ajutorul sistemului.
Sistemele de siguranta viitoare, care, spre exemplu vor frana autovehiculul in cazul unei posibile coliziuni, vor avea nevoie de o retea video si senzori radar. Daca intr-o prima faza, ACC va fi montat pe automobilele de lux, va urma introducerea lui ulterioara si in segmentele inferioare.
Siguranta pasiva
Sistemele de siguranta pasiva sunt:
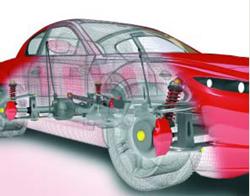
- structura sasiului sau caroseriei care este astfel proiectata astfel incat, in caul unei coliziuni, sa se deformeze controlabil, astfel incat unele zone sa absoarba energia de impact si sa se deformeze, iar alte zone sa ramina cat mai putin deformabile oricare ar fi forta si directia impactului. Marea majoritate a autovehiculelor de azi sunt construtie astfel incat la loviturile frontale sau din spate, partea frontala sau cea din spate sa se deformeze foarte tare. Totodata se declanseaza si capsa pirotehnica din centura care o bloceaza. si sa absoarba impactul, iar habitaclul sa fie foarte putin afectat. Sistemul de iluminare, sistemele de vedere pe timp de noapte duc de asememena la imbunatatirea sigurantei pasive.
- Structura de rezistenta a habitaclului si elementele suplimentare de rigidizare a anumitor componente (de exemplu barele de titan introduse in usi pentru a oferi protectie sporita la loviturile laterale);
- Gemuri si parbrize cu spargere controlata intr-un anume interval de timp de la producerea coliziunii.
- Materialele din care sunt contruite
elementele de interior ale autovehiculului (bord, volan, fata de
- Sistemele de retinere suplimentara (aceste sisteme sunt in principiu denumite Airbag sau SRS);
 Airbag.
Airbag.
Acest
sistem a aparut in timpul celui de-al doilea razboi mondial, cand unele avioane
au fost dotate cu perne care se umflau in caz de prabusire.
Sistemul a fost preluat de industria auto dupa anii "70 si a inceput sa fie dezvoltat. In 1998 incepuse sa fie un standard ca toate masinile noi sa aiba airbag sofer si pasager.
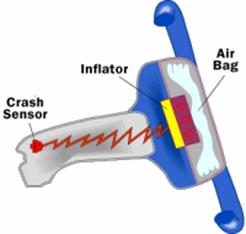
Sistemul este foarte simplu si este compus din urmatorele componente:
- senzori de decelerare;
- unitate de control electronica;
- perna de aer.
- centurile pretensionate.
Senzorii de decelerare au rolul de a oferi unitatii de control electronice informatii despre valorile decelararii. Decelerarea ofera sistemului informatia referitoare la iminenta producere a unei coliziuni. Senzorii pot fi unidirectioali sau bidirectionali. Senzorii unidirectionali inregistreaza decelarari pe directia inainte, pe cand senzorii bidirectionali inregistreaza decelerari atat pe directia inainte cat si pe directia inapoi. In funtie de directiile pe care se doreste monitorizarea decelerarii se pot folosi mai multi senzori uni sau bidirectionali.
Unitatea de control electronica este cea care receptioneaza informatiile de la senzori, le prelucreaza si comanda declansarea sau nu a sistemului de protectie. Semnalele de la senzori sunt prelucrate in functie de mai multe criterii. In principiu semnalele sunt prelucrate si filtrate deoarece senzorii de deceleratie inregistreaza si acum cand se franeaza extrem de puternic, iar in acea situatie sistemul nu trebuie sa se declanseze. Iar in functie de acestea unitatea de control decide ce perne declanseaza si in ce stadiu de umplere (deoarece sistemele noi au 2 stadii de umplere, iar in functie de gravitatea coliziunii se declanseaza doar primul stadiu de umplere sau ambele stadii), astfel in functie de directia loviturii pot fi declansate numai pernele din fata sau cele din fata si cele laterale. Tot aceasta unitate comanda si blocarea centurilor pretensionate.
La multe din masini senzorii si unitatea centrala se afla montate in aceiasi carcasa care se monteaza direct pe sasiu si are pe carcasa o sageata care ii indica pozitia corecta de montare (astfel de sisteme mai simple se regasesc de obicei pe autoutilitarele de marfa).
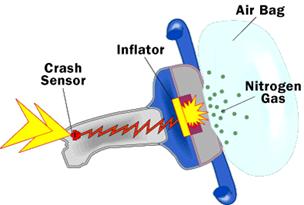
Perna de aer este confectionata dintr-un material special si care este impaturita in volan, in bord, in scaune, in usi sau in stilpi. Tot modulul este format dintr-o capsula de initializare si acesta perna speciala. Capsula este comandata electric de catre unitatea electronica de control, iar in urma primirii acestui semnal electric se activeaza capsa pirotehnica care declanseaza umflarea rapida a pernei. Umflarea se poate face in cel mult 2 stagii in functie de forta loviturii. Pe acelasi principiu lucreaza si capsa pirotehnica de blocare a centurilor care este actionata de un semnal electric trimis de unitatea electronica de control.
Explozia acestei capse provoaca blocarea centurii. Impulsul de declansare al capsei pirotenhice este dat de semnal electric provenit de la unitatea electronica de control care provoaca apoi o reactie chimica intre acidul de sodiu si nitratul de potasiu. Reactia provoaca degajarea masiva de nitrogen care umfla perna cu o viteza de aproximativ 320 km/h. Perna se desumfla apoi rapid datorita gaurilor cu care este prevazuta. Timpul de umflare si desumflare este foarte strict calculat.
Tot acest proces are loc cam in 125 de milisecunde. Fiecare din acesti pasi este riguros calculat si trebeie sa se intimple exact atunci cand trebuie. Ca sa va faceti o idee cam cat de riguros este calculat totul trebuie ca perna sa se umfle si sa se desumfle in 125 de milisecunde- nu mai mult nu mai putin, geamul lateral de la sofer trebuie sa se sparga in 600 de milisecunde de dupa impact si sa se sparga in bucati care sa nu fie mai mari de 5 milimetri.
Sistemul este prevazut cu un sistem de alimentare cu energie electrica paralel cu ce l standard de la baterie, asta pentru a putea functiona si in cazul in care bateria autovehiculului este distrusa in accident, De aceea are un condensator de capacitate mare care poate inmagazina si furniza curentul necesar functionarii intr-o perioada scurta de timp. Sitemul necesita respectarea unor instructiuni de siguranta pentru a minimiza efectele unui accident si ranile provocate.
Sistemele moderne de airbag detecteaza daca sunt pasageri in masina pentru a sti daca porneste sau nu sistemul. Aceasta in cazul in care va aflati cu masina stationati si sunteti loviti de un alt autovehicul. Detectarea prezentei pasagerilor in masina se face prin senzori de greutate care sunt montati in scaune. Este recomandat ca atunci cand sunteti cu masina stationati sa pastrati cheia in contact pe pozitia 1. Airbagul este activ atunci cand cheia este pe pozitia 1 si el se va declansa chiar daca masina sta pe loc.
 Durata
medie de functionare a unui sistem airbag este de 10 ani. Dupa 10 ani este bine
sa inlocuiti sistemul. Astefle de elemente de atenionare se gasesc si la bordul
autovehiculului.
Durata
medie de functionare a unui sistem airbag este de 10 ani. Dupa 10 ani este bine
sa inlocuiti sistemul. Astefle de elemente de atenionare se gasesc si la bordul
autovehiculului.
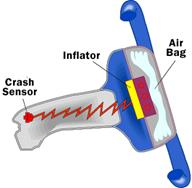
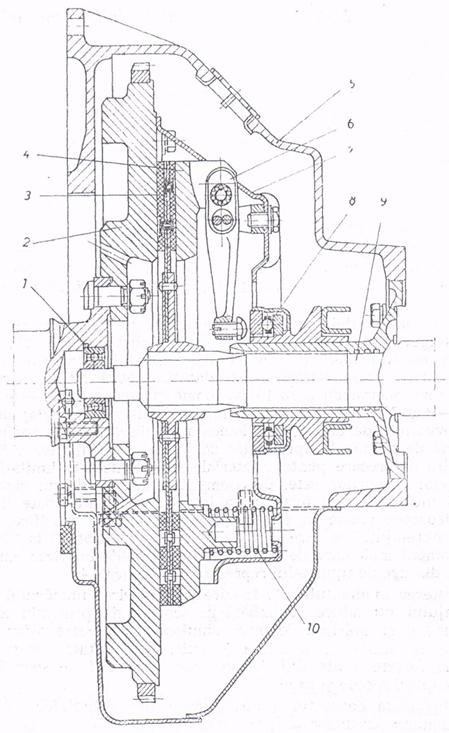
Fig. 1. Constructia ambreiajului mecanic cu un singur disc:
1 - rulmentul de sprijin al arborelui ambreiajului; 2 - volantul motorului; 3 - disc de frictiune; 4 - disc de presiune; 5 - carter; 6 - parghie de decuplare; 7 - carcasa; 8 - rulment de presiune; 9 - arborele ambreiajului; 10 - arcuri de presiune.
|
Nr. | |||||||||
|
Marca / Parametrul |
Volvo V70 2.4i |
Porsche Boxter 2.7i |
Subaru Legacy |
Camry 3.0V6 |
Volvo S60 |
Ford Mondeo 2.5V6 |
Jaguar S-Type 3.0V6 |
Mercedes C240 Elegance |
Mercedes E240 Elegance |
|
Pe[kW] | |||||||||
|
np[rot/min] | |||||||||
|
Me[N*m] | |||||||||
|
nm[rot/min] | |||||||||
|
Vmax[km/h] | |||||||||
|
Masa totala maxima autorizata | |||||||||
|
Sarcina utila | |||||||||
|
I0 | |||||||||
|
Icv1 | |||||||||
|
Formula rotilor |
| ||||||||
|
Tip ambreiaj |
hidraulic | ||||||||
|
Tip arcuri de presiune | |||||||||
|
Tip mecanism de actionare |
mecanic | ||||||||
|
Dimensiuni anvelope |
205/55 R16 |
R17 |
R16 |
205/55 R16 |
R16 |
R15 |
225/50R17 |
R15 |
R16 |
Memoriu de calcul
Determinarea momentului de calcul al ambreiajului
Raportul de transmitere al transmisiei principale: i0= 4.388
Rapoartele de transmisie ale cutiei de viteze:
i1= 3.454 i2= 1.842 i3= 1.310 i4= 1.03
Masa totala maxima autorizata a autovehiculului: Ma= 1930 kg
Tipul si dimensiunile anvelopei: 215/50R17
Tipul ambreiajului, tipul arcurilor de presiune, tipul mecanismului de actionare: ambreiaj monodisc,
Momentul de calcul:
Mc= β*Mmax [daN*m] , unde:
Mc - momentul de calcul al ambreiajului
β - coeficientul de siguranta al autovehiculului
Mmax - momentul motor maxim
β = 1.3
Mc= 1.3*25.2 = 32.76 daN *m
Determinarea dimensiunilor garniturilor de frecare
Re
= 10 *  [mm] ,unde:
[mm] ,unde:
λ - coeficientul ce depinde de tipul ambreiajului si al autovehiculului
i - numarul de perechi de suprafete de frecare
![]() - pt ambreiaj monodisc
- pt ambreiaj monodisc
i = 2 - pt ambreiaj monodisc
c = 0.55 - pt autovehicule
Re
= 10 *  = 120
= 120
Diametrul exterior al garniturii: De = 250 [mm]
Diametrul interior al garniturii: Di = 155 [mm]
Re = ![]() =
125 mm Ri =
=
125 mm Ri = ![]() =
38.75 mm
=
38.75 mm
Re - raza exterioara a garniturii
Ri - raza interioara a garniturii
Raza medie a suprafetei de frecare:
Rm
= ![]() *
* ![]() [mm]
[mm]
Rm - raza medie a suprafetei de frecare
Rm = 88.55 mm
Determinarea fortei necesare de apasare a arcurilor asupra discurilor de presiune
Fa
= ![]() * 103 [daN]
* 103 [daN]
Fa - forta de apasare asupra discului de presiune
- coeficientul de frecare intre discurile ambreiajului
cf - coefficient ce tine seama de de frecarea dintre butucul discului condus si arboreal ambreiajului
cf = 0.90 - pentru ambreiaj monodisc
Fa
= ![]() * 103 = 820 daN
* 103 = 820 daN
Verificarea garniturilor la frecare
p = ![]() * 105
* 105
p - presiunea specifica intre suprafetele de frecare
p = 2.45 < pa(=1.5 . 3.5)
Verificarea la uzura
Ls = ![]() [
[![]()
Ls - lucrul mechanic specific de frecare la patinare
L - lucrul mechanic de frecare la patinare al ambreiajului
A' - aria unei suprafete de frecare
rr - raza de rulare a rotilor motoare
r0 - raza libera a rotii
L= 357.3 *Ga * ![]() [daN/m]
[daN/m]
rr = 0.95 * r0 = 0.277
r0 = 17/2 * 25.4 + 215 * 50% = 323 mm = 0.323 m
L = 357.3 *1930 * ![]() = 275.83 daN/m
= 275.83 daN/m
A' = ![]() *
* ![]() * 10-2 [cm-2]
* 10-2 [cm-2]
A' = 302.02
Ls = ![]() = 0.45
= 0.45
Ls < Lsa(= 0.75)
Verificarea ambreiajului la incalzire
![]() [oC]
[oC]
Δτ - cresterea de temperature
γ - coeficientul care exprima fractiunea din lucrul mecanic de franare consumat pentru incalzirea piesei care se verifica
c - caldura specifica a materialului piesei care se verifica
mp - masa piesei care se verifica
mp = ρ * A * hp * g * 10-1 [daN]
ρ = 7800 Kg/m3 - pentru fonta
A - aria frontala a discului
- pentru ambreiajul monodisc
c = 0.115 ![]()
mp = 2.035
Δep = Δe + 4 = 254 mm Δip = Δi - 4 = 151 mm
hp = 7 * 10-3 [m]
hp - grosimea discului de presiune
![]() = 1.38 < Δτa
= 1.38 < Δτa
Determinarea diametrului sarmei si a diametrului de infasurare a spirei
Farc - forta de apasare ce revine unui arc
Farc = 40 daN
na'
= ![]() = 20.5
= 20.5
na - numarul de arcuri
na = 21
Fa' = ![]() [daN]
[daN]
Fa' - forta care e necesara sa o dezvolte un arc
Fa' = 39.04 daN
Fa'' = 0.15 * Fa [daN]
Fa'' = 123 daN
d =  [mm]
[mm]
d - diametrul sarmei arcului
k - coeficient de corectie
τta - rezistenta admisibila la torsiune a arcului
τta = 7000 ![]()
k = ![]() = 1.3105
= 1.3105
c = 5
d =  = 5.41
= 5.41
d = 5.5 STAS
D = c * d = 5 * 5.5 = 27.5
D - diametrul de infasurare a spirei arcului
Determinarea numarului de spire ale arcului de presiune
ns = ![]()
ns - numarul de spire active
G - modul de elasticitate transversal a sarmei arcului
k1 - rigiditatea arcului
k1 = ![]() = 41.8
= 41.8 ![]()
Δf1 = 2 * nd * jd + nd * j' = 2 * 1 * 0.75 + 1 * 0.5 = 2
Δf1 - sageata suplimentara corespunzatoare deformatiilor arcului la decuplarea ambreiajului , unde:
nd - numarul de discuri conduse
jd - jocul dintre o pereche de suprafete de frecare necesar pentru decuplarea complete a ambreiajului
j' - cresterea grosimii discului condus datorita elementului elastic axial
nd = 1
jd = 0.75
j' = 0.5 mm
G =
800.000 [ ![]()
ns
= ![]() = 1.05
= 1.05
Am luat: ns = 6
Numarul total de spire: nt = ns + 2 = 8
Determinarea lungimii arcului in stare libera
L0 = L1 + f1 [mm]
L0 - lungimea arcului in stare libera
L1 - lungimea arcului comprimat in pozitia decuplata a ambreiajului
f1 - sageata arcului corespunzatoare pozitiei cuplate
L1 = (ns +2) * d + (ns + 1) * js = 51
js - distant dintre spirele arcului in stare comprimata
js = 1 [mm]
f1
= ![]()
f1 = 16.77
L0 = 67.77
![]() = 2.46 < 3
= 2.46 < 3
Determinarea coeficientului de siguranta al ambreiajului
Ma' = * i * Fa''' * na * Rm * 10-3 [daN*m]
Ma' - momentul de frecare al ambreiajului dupa uzura garniturii de frecare
Fa'''
= Fa' * ![]()
f2 = f - Δu
f - sageata corespunzatoare arcului in pozitia cuplata a ambreiajului
f = ![]() [mm]
[mm]
f = ![]() = 5.37 mm
= 5.37 mm
Δu - destinderea corespunzatoare uzurii tuturor garniturii de frecare pana la limita maxima admisibila
Δu = 2 * nd *Δu1 = 2 * 1 * 1.2 = 2.4
Δu1 = 1.2
f2= 5.37 - 2.4 = 2.97
Fa''' = 39.04
* ![]() = 21.79 daN
= 21.79 daN
Ma' = 0.25 * 2 * 21.79 * 21 * 88.55* 10-3 = 20.25 daN*m
βu
= ![]() = 0.803
= 0.803
Determinarea lucrului mechanic necesar debreierii
Ld
= ![]() *
* ![]() * na *
* na * ![]()
Ld - lucrul mecanic necesar debreierii
ηa - randamentul mecanic de actionare
ηa = 0.80
Ld
= ![]() *
* ![]() * 21 *
* 21 * ![]() = 3.6 daN
= 3.6 daN
Calculul arborelui ambreiajului
d1 =  [cm]
[cm]
d1 - diametrul interior al arborelui ambreiajului
τta - rezistenta admisibila la torsiune
τta = 1000
d1
=  = 2.51
= 2.51
Din STAS 1770 - 68 : di = 32 mm, de = 40 mm, z = 10 mm, b = 2.5 mm
di - diametrul interior al canelurii
de - diametrul exterior al canelurii
z - numarul de caneluri
b - latimea canelurii
Verificarea la strivire
ps = ![]() [
[![]()
l - lungimea butucului discului condus
h - inaltimea canelurii arborelui
l = 30 cm
h = ![]() [cm]
[cm]
h = 0.4
ps
= ![]() = 1.51 < psa (= 200.250) - arborele rezista la strivire
= 1.51 < psa (= 200.250) - arborele rezista la strivire
Verificarea la forfecare
τf = ![]() [
[![]()
τf = 24.26 < (![]() - arborele rezista la forfecare
- arborele rezista la forfecare
Calculul discurilor ambreiajului
Presiunea specifica
Ps = ![]() *
* ![]() [
[![]()
ps - presiunea specifica
R - raza cercului pe care sunt dispuse reazemele discului
Z - numarul de reazeme
A - aria unei suprafete de contact solicitate la strivire
a - grosimea carcasei ambreiajului in zona de contact cu reazemele
l - lungimea suprafetei de contact
R = 12.6 cm
a = 0.3 cm
l = 2 cm
Z = 3
A = l * a = 0.6
Ps = ![]() *
* ![]() = 144.44 < 100 - reazemul rezista la strivire
= 144.44 < 100 - reazemul rezista la strivire
Calculul discului condus
τf =  * 102 [
* 102 [![]()
rn - raza cercului pe care sunt dispuse niturile de fixare
dn - diametrul niturilor
zn - numarul de nituri
rn = 6 cm
dn = 0.8 cm
zn = 5
τf =  * 102 = 217.35 < 300 - niturile butucului rezista la forfecare
* 102 = 217.35 < 300 - niturile butucului rezista la forfecare
Verificarea niturilor la strivire
ps = ![]() * 102 [
* 102 [![]()
ln - lungimea partii active a nitului
ln = 0.2
ps = ![]() * 102 = 682.5 < 800 - niturile bucului rezsta la strivire
* 102 = 682.5 < 800 - niturile bucului rezsta la strivire
Calculul arcurilor elementului elastic
Diametrul sarmei d = 3 mm
Diametrul spirei arcului D = 14 mm
Numarul total de spire ns = 6
Numarul de arcuri ale elementului suplimentar Z = 6
Calculul fortei de actionare a pedalei ambreiajului
ia = ip * it
ip = ![]() it =
it = ![]() *
* ![]()
ip - raportul de transmitere al parghiilor de debreiere
it - raportul de transmitere al pedalei de actionare
ia = 30
ip = 2
it = 20
Se adopta : a = 150 mm, b = 30 mm, c = 100 mm, d = 25 mm, l = 50 mm, f = 25 mm
![]() = 0.8 - randament mechanic
= 0.8 - randament mechanic
Fp = ![]() [daN]
[daN]
Fp - forta de actionare a pedalei
Fp = ![]() = 23.12 daN
= 23.12 daN
Calculul cursei pedalei de actionare
sp = [s1 + (Δf1 * ip)] * it [mm]
s1 - cursa libera a rulmentului de presiune
s1 = 2 mm
sp = [2 + (2 * 2)] * 20 = 120
sp = 100.150 - pt autovehicule
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3788
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved