| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
ROBOTII DE TIP PARALEL
Robotii paraleli sunt definiti ca fiind mecanisme cu lanturi cinematice inchise formate dintr-un organ terminal cu n grade de libertate dispus pe o platforma mobila ce se leaga de o platforma fixa prin n lanturi cinematice independente.
Dupa unii autori se impun unele restrictii si anume: fiecare lant cinematic este format din maximum doua segmente articulate; actionarea se face prin n elemente de actionare simple, cate unul pentru fiecare lant cinematic excluzand manipulatoarele redundante la care numarul elementelor de actionare este mai mare ca gradul de libertate de comandat.
[2] In anii '60 au aparut simulatoare de zbor constituite din mecanisme inchise cu mai multe grade de libertate ce deplaseaza o platforma mobila echipata cu diverse instrumente. Analizindu-le s-a constatat ca au o buna comportare dinamica, bucurandu-se de un raport mic
masa/sarcina utila x viteza; acceleratii mari pentru deplasari mici iar atunci cind efectorul final se afla in apropierea zonei centrale a platformei, elementele de actionare nu suporta decat aproximativ 1/3 din sarcina utila.
Efectul imediat este posibilitatea dimensionarii unor motoare mai mici, la aceleasi sarcini, ceea ce conduce la o structura mai lejera a robotului.
Cerintele robotilor paraleli actuali sunt diferite in raport cu cele ale simulatoarelor de zbor. Astfel, ele trebuie sa realizeze miscari rapide la incarcari grele si sa aiba complianta activa (comandabila).
Complianta este acea insusire a manipulatorului care face ca aplicand o sarcina activa asupra organului terminal, acesta sa poata suferi deformatii. Daca nu se intervine prin comanda robotului, complianta este de tip pasiv.
Robotii paraleli au aceasta calitate de a avea o complianta activa.
1.Avantaje ale utilizarii robotilor paraleli:
Un raport foarte bun masa manipulata / masa robot, fiecare motor suportand 1/n din masa manipulata, unde n reprezinta numarul lanturilor cinematice independente.
Masele mici in miscare asigura o buna comportare dinamica ceea ce asigura viteze si acceleratii mari
Precizie pozitionala mare
Pe langa avantajele descrise, mai sunt bineinteles si altele, dar care nu au o importanta decisiva in ceea ce priveste proiectarea robotilor pentru manipularea antenelor.
Ca dezavantaje se pot mentiona: volumul de lucru redus comparativ cu cel al robotilor seriali, utilizarea unor articulatii superioare cu mai multe probleme tehnologice.
Dintre modelele cele mai cunoscute amintesc: INRIA, DELTA3, DELTA4, HEXA.
Tabel 1. Analiza comparativa dintre robotii seriali si paraleli
Roboti seriali |
Roboti paraleli |
|
Arhitectura in lant deschis |
Arhitectura in lant inchis: mai multe lanturi independente leaga baza de organul terminal |
|
Arhitectura in consola- trebuie sa suporte greutatea motoarelor si segmentelor din aval Þ forte si momente de incovoiere mari |
Structura in lant inchis asigura preluarea sarcinilor active si pasive mult mai eficient; Cind efectorul este in jurul pozitiei centrale a platformei mobile elementele de actionare suporta doar 1/3 din sarcina |
|
Raport redus sarcina utila/masa robot (roboti grei de 5 tone la sarcini de 500 kg) |
Raport mare sarcina utila/masa robot (roboti usori la sarcini mari) |
|
Precizie limitata (0,1mm) data de repetabilitate si nu de pozitionare absoluta |
Precizie buna pozitionare absoluta pina la 5 mm |
|
Captorii interni nu pot sa ia in considerare deformatiile |
Posibilitatea reducerii dimensiunilor constructive la aceeasi sarcina (motoare mai mici si de putere mai redusa) |
|
Comportament dinamic limitat: viteze si acceleratii reduse |
Comportament dinamic foarte bun: unii roboti ajung la 22g si viteze de 6 m/s |
|
Spatiu de lucru mare |
Spatiu de lucru restrins |
|
Complianta pasiva |
Complianta activa |
|
Domeniu de aplicatii: operatii simple si variate pe spatii largi |
Domeniu de aplicatii: operatii complexe la viteze si acceleratii mari, intr-un spatiu de lucru redus |
Tinand cont de toate avantajele si dezavantajele pe care robotii le prezinta (a se vedea si analiza comparativa din tabel 1), concluzia la care se ajunge este folosirea robotilor paraleli la manipularea antenenelor.
Cerintele cere se impun la realizarea unui "dispozitiv" de orientare sunt:
precizie mare la orientare
posibilitatea descrierii unui interval unghiular mare
realizarea de viteze si acceleratii mari
sustinerea de mase de manipulat destul de mari (unele antene au greutati de ordinul zecilor sau sutelor de kilograme)
In cele ce urmeaza se vor exemplifica cateva variante constructive de roboti [4], unde au fost ei utilizati ei initial, si particularitatile lor.
2.Istoricul aparitiei robotilor paraleli
In trecut mecanismele articulate au fascinat cativa inventatori si filozofi:
Heon din Alexandria
Vaucanson al Frantei
Cintaretul cu lauta din Cremona, Italia
El-Ahari secolul 12 Arabia
Leonardo da Vinci -perioada renascentista Italia
Rene Descartes din Franta
Roentgen & Kintzing din perioada Baroca
Pionierul acestor tipuri de roboti (paraleli) este considerat Pollard, un inginer care lucra in domeniul constructiei de automobile. El este considerat un vizionar in acest domeniu deoarece a fost primul care a patentat un mecanism pentru vopsirea masinilor in 1938 (fig.3).
Acest robot a fost proiectat in intentia de a vopsi automat caroserii. Robotul nu a fost terminat deoarece pe acea vreme nu aveau tehnologia necesara pentru controlul mecanismului. Mai mult, lui Pollard i se atribuie responsabilitatea de a fi primul care a facut o propunere pentru construirea unui robot. Dupa cum se vede si din figura, structura e formata din 3 lanturi cinematice structura numita tripod
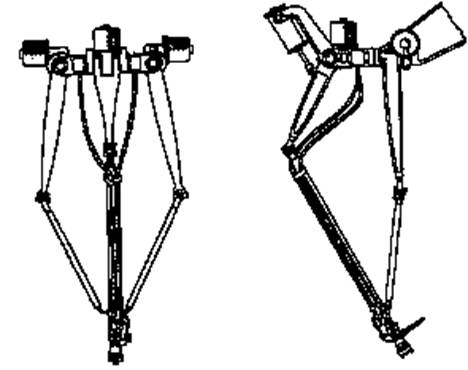
Fig.3 Mecanism pentru vopsirea automobilelor (Pollard)
. Structura era un hibrid ce continea un mecanism paralel principal cu trei grade de libertate ce pozitiona pistolul de pulverizare a vopselei si legat in serie de acesta un mecanism de apucare cu trei grade de libertate care orienta pistolul pulverizator. Aceasta idee a fost copiata si aplicata la cei mai multi dintre robotii industriali.
Fig. 4 Simulator de zbor
Primul care a realizat si utilizat ca manipulator un asemenea robot a fost V.E.Gough. El a realizat o asa-zisa masina de testat roti de avioane (fig 5).
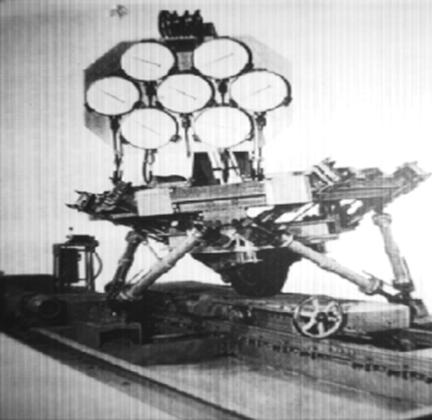
Fig. 5 Masina de testat roti a lui V.E.Gough
Se pot observa cei sase actuatori lineari montati in cite trei cardane atit pe platforma fixa cit si pe cea mobila.
Manipulatorul de antene radar, simulatorul de zbor (ex. Fig.4) sau platforma marina de foraj sunt numai citeva dintre proiectele dezvoltate de D. Stewart. Platforma Stewart, este o structura paralela cu sase grade de libertate..
D.Stewart este si primul care a facut o analiza cinematica a unui lant cinematic inchis si a facut un studiu al spatiului de lucru denumit "limitarile amplitudinilor", studiu ce a scos in evidenta existenta singularitatilor.
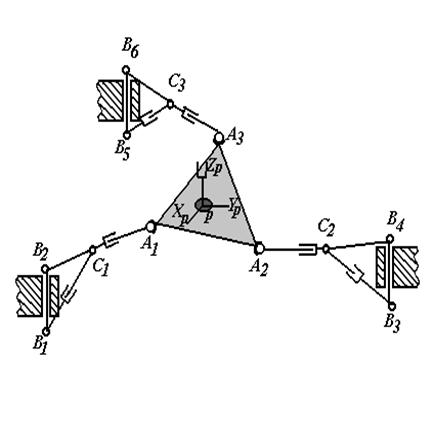
Fig.6 Schema platformei Stewart
Dunlop a realizat o platforma Stewart destinat pozitionarii unei antene radio ce acopera un interval unghiular foarte mare (Fig.7).
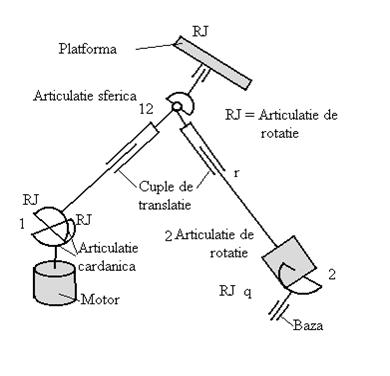
Fig. 7 Dispozitiv pentru orientarea antenelor Radio
Un alt exemplu de robot paralel este robotul Delta care este destinat manipularii unor sarcini mici dar cu viteze si acceleratii foarte mari. Constructia (Fig. 8) arata ca motoarele de actionare sunt dispuse pe o platforma superioara. De mentionat ca acest tip de robot a fost dezvoltat in Elvetia, la scoala Politehnica din Lausanne.
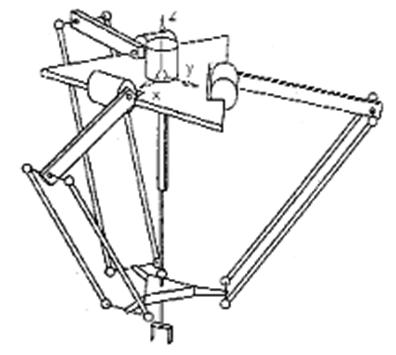
Fig .8 Robotul DELTA. Reprezentare schematica
Tot roboti paraleli sunt si cei de tip Manta sau Kanuk. Robotul Manta este format din trei brate formate fiecare din doua parti componente: bratul de lungime fixa si o sina de ghidare (Fig.9).
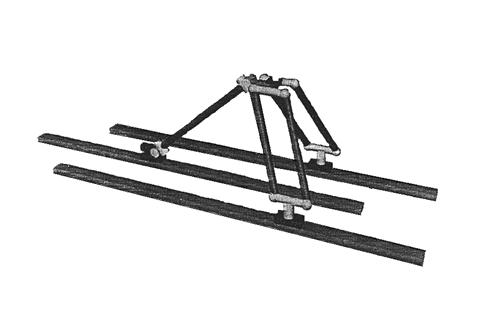
Fig.9 Prezentarea robotului Manta
Robotul Kanuk se diferentiaza de cel Manta prin faptul ca in loc de trei lanturi cinematice are patru, de unde ii vine si numele de cuadrapod (Fig.10). Ca si robotul Manta, robotul Kanuk are aceleasi parti componente ale lanturilor cinematice: bratul de lungime fixa si sinele de ghidare.

Fig. 10 Prezentarea robotului Kanuk
Dupa cum am vazut, robotii paraleli au o mare varietate de forme.Pe linga robotii tripozi si quadrapozi mai exista si cei hexapozi, roboti de o mai mare complexitate in ceea ce priveste comanda lor. De obicei acesti roboti au cite un motor pentru fiecare "picior", comandat separat. Motorul poate fi electric de curent continuu, pas cu pas sau chiar hidraulic sau pneumatic. In cele ce urmeaza se pot vedea doua tipuri de roboti hexapozi: SSM Hexapod si schema robotului Hexaglide (Fig 11).
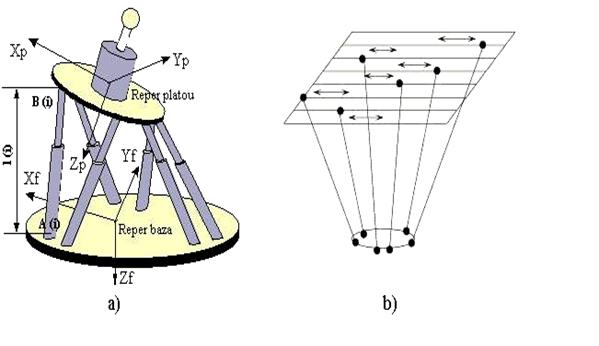
Fig. 11 SSM Hexapod (dupa CMW-Marioni) si Hexaglide (dupa J.M.Merlet)
In figura 9 se poate observa, in linii mari, care este principiul dupa care functioneaza acesti roboti. SSM Hexapod (fig11 a) modifica pozitia platoului prin actionarea celor sase "picioare" care sunt de tip telescopic. Hexaglide executa aceleasi miscari ale platoului, dar cele sase "picioare" executa o miscare de alunecare pe sase sine apartinind fiecarui picior. Se poate observa ca robotul SSM Hexapod are un gabarit mult mai mic si necesita un spatiu de lucru mult mai mic.
Robotii paraleli sunt utilizatii intr-o mare varietate de domenii. Pe linga cele aratate mai sus, se mai numara si utilizarea lor la centrele de prelucrare care necesita un mare numar de grade de libertate. Este si cazul masinii de frezat Ingersoll care are sase grade de libertate (fig. 12).
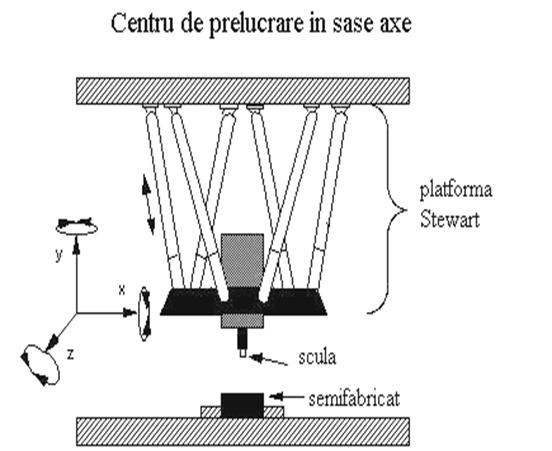
Fig.12 Masina de frezat Ingersoll
De mentionat ca in ceea ce priveste denumirea platformelor utilizate la acesti roboti au fost des intilniti atit sub denumirea de "platforma Gough" cit si sub forma de "platforma Stewart". Mai mult, cei de la firma INRIA sustin ca denumirea de "platforma Stewart" este gresita deoarece cel care a inceput dezvoltarea acestor roboti a fost Gough si nu Stewart. Asadar daca in cele ce urmeaza sau in cele ce am spus pina acum am folosit denumirea de platforma Stewart este pentru ca am intilnit-o mai des in literatura de specialitate.
Exista desigur o mult mai mare varietate de roboti paraleli decit cei prezentati mai sus, firmele producatoare au incercat sa-i adapteze la cerintele beneficiarilor.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 5058
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved