| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Actionarea robotilor industriali si nu numai este una dintre partile cele mai importante de care se tine seama atunci cand se face proiectul de elaborare al robotului. Astfel, in functie de destinatia robotului, se poate opta pentru o serie de variante de sisteme de actionare. Printre acestea amintim:
Actionarea pneumatica
Actionarea hidraulica
Actionarea electrica
Combinatii dintre cele de mai sus
Pentru a alege corect un anumit tip de actionare trebuie sa tinem seama de faptul ca motoarele pentru actionarea robotilor trebuie sa indeplineasca urmatoarele conditii[2]:
sa dezvolte cuplu sau forta motoare nominala mai mare decat suma celor rezistente a celor de frecare si a celor inertie, pentru cea mai mare valoare a acceleratiei elementului mobil actionat pe directia de miscare si in pozitia pentru care forta respectiv momentul redus in cupla are valoare maxima
masa inertiala, respectiv momentul de inertie propriu cit mai reduse
sa aiba un indice energetic (putere nominala/greutate) cit mai ridicat
sa prezinte siguranta sporita in executarea comenzilor de deplasare primita
sa aiba o comportare cit mai liniara intre marimea de iesire (viteza unghiulara sau liniara) si marimea de comanda (tensiune, curent, debit, frecventa)
sa asigure stabilitatea sistemului la eventuale perturbatii externe, pastrind ferm pozitia realizata anterior pina la o noua comanda. (din punct de vedere al manipularii antenelor aceasta conditie este foarte importanta, de exemplu, pozitia antenei trebuie sa fie fixa la un moment dat sau un interval de timp in ciuda vintului si/sau a greutatii proprii care actioneaza pe o anumita directie asupra antenei, modificarile pozitiei antenei pot duce la o grava perturbare a receptionarii sau emisiei semnalelor.
Sa nu fie generatoare de oscilatii neamortizate sau vibratii
Sa prezinte un punct de echilibru termodinamic cit mai scazut si o buna stabilitate termica in timp
In cazul intreruperii accidentale a energiei care le alimenteaza, sa fie capabile de a bloca sistemul mecano-cinematic in pozitia curenta realizata, daca lantul cinematic actionat nu asigura acest lucru. Acesta este una din conditiile esentiale de protectie a muncii operatorilor umani si de asigurare a integritatii sistemului robotic
sa prezinte o fiabilitate cit mai buna, depanarea sau inlocuirea lor sa fie usoara
In continuare voi trece in revista prin citeva cuvinte tipurile de actionare:
- pneumatica
- electrica
- hidraulica
1 ACTIONAREA PNEUMATICA
Avantaje[2]:
este foarte economica (agentul de actionare este aerul comprimat)
simplitate a schemelor de comanda-reglaj
posibilitatea supraincarcarii surselor motoare fara pericol de avarii
pericol redus de accidente
intretinere usoara si nepoluarea mediului
Dezavantaje[2]:
compresibilitatea ridicata a aerului din incinta camerelor motoare si a conductelor, fapt ce limiteaza aplicarea actionarii de tip pneumatic in cazurile unde precizia de pozitionare nu constituie un criteriu daca aceasta nu se obtine prin tamponare rigida la capetele de cursa ale elementului mobil actionat
randamentul scazut al acestui tip de actionare, din cauza presiunii scazute
aparitia unor socuri mecanice la capetele curselor pistoanelor cilindrilor pneumatici daca determinarea lungimii curselor se face prin tamponare rigida
producerea unor zgomote specifice caracteristice la deversarea in atmosfera a aerului de retur si functionarii cu socuri a aparatelor de comanda
depunerea condensului de apa in incintele aparatelor de executie si reglare si de aici pericolul de corodare si dereglari de functionare.
Reglarea curselor (foarte important la roboti) se poate face in mai multe moduri. Mai jos[2] se exemplifica doua moduri de realizare precisa a curselor pentru pistonul unui cilindru pneumatic. Fig.13 a) cu limitator fix se obtine o cursa de valoare fixa intre capatul dreapta a cilindrului si limitatorul rigid pentru capatul de cursa stinga. Fig.13 b) cursa se poate regla prin alegerea a cite doi limitatori stinga respectiv dreapta.
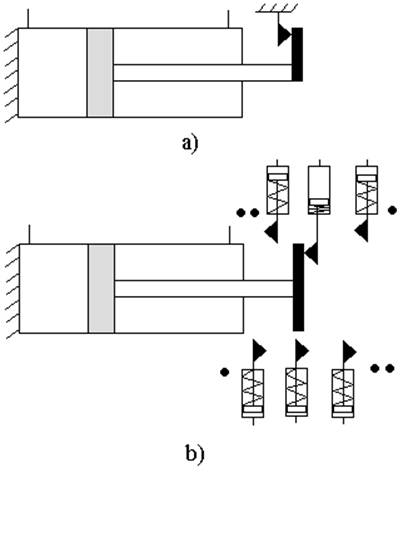
Fig.13 Obtinerea curselor prin tamponare pe limitatori rigizi
Reglarea valorii vitezelor de deplasare, in ambele sensuri, se poate face in modul cel mai simplu, ca si in actionarile hidraulice prin montarea perechilor drosel-supapa pe ambele cai de alimentare a cilindrului pneumatic (Fig 14).
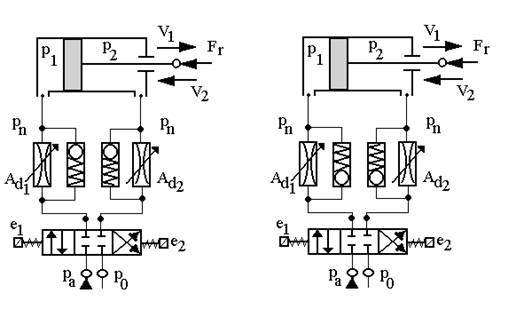
Fig.14 Reglarea vitezelor de deplasare pentru ambele sensuri
Performantele de viteza ale robotilor sunt cu atit mai bune cu cit acestia pot dezvolta viteze cit mai ridicate pe axe, in conditiile in care atit accelerarea cit si decelerarea elementelor mobile se face cu luarea unor masuri de inbunatatire a comportarii dinamice.
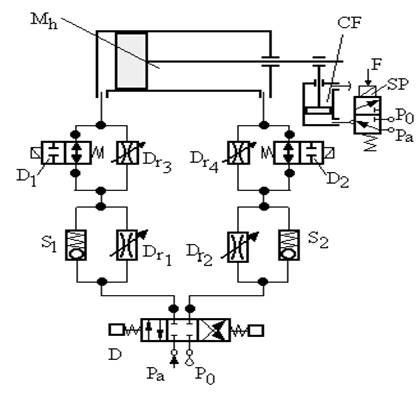
Fig.15 Actionare pneumatica pe un grad de libertate cu reglarea vitezelor in doua trepte pentru fiecare sens
In Fig.15 se prezinta schema completa de actionare pneumatica pe o axa-robot, schema ce prevede reglarea in doua trepte atit a vitezei pentru fiecare sens de deplasare, cit si blocarea ferma a tijei cilindrului intre doua faze de miscare. Perechile drosel-supapa Dr1-S1 si Dr2-S2 regleaza vitezele rapide stinga-dreapta, iar droselele Dr3 si Dr4regleaza vitezele lente necesare fazelor de demaraj si frinare pentru fiecare sens de miscare.
Distribuitoarele D1 si D2 cu doua pozitii inchis-deschis stabilesc introducerea in circuitul de aer a droselelor Dr1 si Dr2 si prin aceasta trecerea de la vitezele rapide la cele lente si invers. Cilindrul de frinare CF, comandat de catre sertarul pilot SP, lucreaza sincronizat cu distribuitorul principal D, astfel incit in momentul comutarii distribuitorului D intr-una din pozitiile corespunzatoare fazei de miscare, sertarul pilot SP isi schimba starea in sensul deblocarii pistonului.
Actionarea pur pneumatica nu este de cele mai multe ori cea mai buna solutie. Din aceasta cauza, in ultimul timp se recurge de multe ori la actionarea pneumatica asistata hidraulic. Actionarea pneumatica asistata hidraulic este de data mai recenta si a fost dezvoltata cu scopul de a aduce imbunatatiri ce duc la urmatoarele avantaje:
controlul mult mai eficace al vitezei de deplasarea al elementului mobilin conditiile unei mai bune stabilitati ale acestuia
pozitia de pozitionare mai buna si rigiditatea crescuta a sistemului de actionare, ca urmare a faptului ca elementul mobil este fixat in pozitie prin inchiderea circulatiei agentului hidraulic ce are o rigiditate incomparabil mai buna decit aerul comprimat.
Este un tip de actionare care cistiga teren mai ales in ultima perioada datorita perfectionarii sistemelor lor de comanda precum si aparitia de noi tipuri de motoare electrice.
Se aplica in cazul [2] robotilor mici si mijlocii caz in care se incadreaza in dezideratele de forma si de suplete ale structurii mecanice. De asemenea acest tip de actionare se utilizeaza acolo unde nu se impune nici un tip de restrictie privitoare la conditii umede, medii explozive.
Utilizarea motoarelor electrice (de curent continuu) prezinta avantajul posibilitatii realizarii unei game foarte mari de turatii si de cupluri motoare cit mai ridicate de catre motoare cit mai mici.
Actionarea prin motoare electrice de curent continuu constituie principala ramura pe care s-au orientat solutiile de actionare a robotilor industriali.
In cele ce urmeaza voi prezenta trei dintre solutiile cele mai intilnite la actionarea robotilor cu motoare electrice:
Actionarea cu motoare electrice de curent continuu
Actionarea cu motoare cu curent alternativ in comanda cu orientare dupa cimp
Actionarea cu motoare pas-cu-pas
In figura de mai jos (Fig.16) este exemplificata o schema de principiu a motorului de curent continuu. S-au facut urmatoarele notatii: AB-infasurarea rotorica, CD-infasurarea de excitatie independenta, EF-infasurarea de excitatie serie, GH-infasurarea de compensare a polilor auxiliari.
Marimile electrice notate in figura sint: U-tensiunea de alimentare, Uetensiunea de excitatie, I-curentul rotoric, Ie-curentul de excitatie.
Dupa modul de alimentare a infasurarilor statorice rezulta variantele de baza ale motorului de curent continuu:
motor cu excitatiederivatie independenta (EF nu exista)
motorul serie (CD nu exista)
motorul cu excitatie mixta (Fig.16)
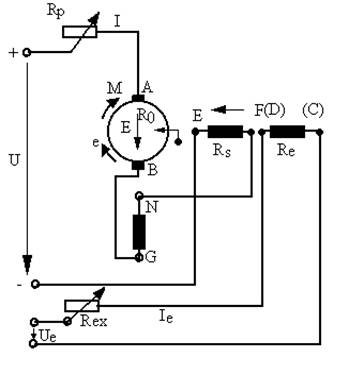
Fig.16 Schema generala a motorului de curent continuu
Este necesar a se preciza urmatoarele in cazul actionarii electrice cu motoare de curent continuu: caracteristica mecanica naturala [5] este dependenta dintre viteza unghiulara w in functie de cuplul rezistent la arbore si este definita prin relatia (1).
![]() (1)
(1)
2.2 Actionarea electrica cu motor de curent alternativ cu orientare dupa camp[2]
Acest nou tip este o tendinta moderna ce cistiga tot mai mult teren in domeniul actionarii robotilor datorita unor avantaje cum sunt:
posibilitatea reglarii precise a pozitiei rotorului motorului si prin aceasta, de reglare precisa a elementului mobil actionat
performante de reglare a vitezei la fel de bune ca si in cazul motoarelor de curent continuu, indicele energetic fiind mai bun
robustete mai buna a motoarelor si pret de cost mai redus al intregului sistem de comanda-actionare
Dezvoltarea si perfectionarea acestor noi solutii de actionare a fost posibila dupa ce electronica de putere a cunoscut o prima dezvoltare, in anii 70, iar mai apoi de introducerea pe scara larga a microprocesoarelor.
Principiul orientarii dupa cimp se bazeaza pe analogia masinilor de curent alternativ care au un cimp invirtitor, cu masina de curent continuu, realizind separarea controlului marimilor magnetice de cele mecanice. Aplicarea acestui principiu presupune comanda, conform legii de miscare dorite, a deplasarii unghiulare a vectorului flux de magnetizare si in acelasi timp masurarea in timp real a pozitiei efective a acestuia.
In figura de mai jos (Fig. 17) se prezinta schema bloc a unui sistem de reglare conceput pe baza orientarii dupa cimp a motorului asincron alimentat de la un convertor static de frecventa.

Fig.17 Schema bloc a sistemului de reglare
Sunt puse in evidenta cele doua bucle de reglare, corespunzatoare componentelor activa si reactiva ale curentului statoric.
Se mai poate mentiona aici ca exista doua metode principale de comanda:
comanda in curent
comanda in tensiune
Problema comenzii motoarelor asincrone pe baza metodei de orientare dupa cimp este foarte vasta si face obiectul unei teorii aparte [6].
2.3 Actionarea electrica cu motoare pas-cu-pas
Exista doua principii de functionare in functie de lanturile cinematice de comanda:
in bucla deschisa, cind pozitia elementului mobil actionat este anticipata prin cunoasterea precisa a functiei semnal de intrare, introducind anumite limitari privind valorile admise ale acceleratiei si frecventei
in bucla inchisa (simpla sau dubla), cind functia semnal de intrare este corelata in permanenta cu pozitia si viteza reala a elementului actionat.
Sistemele de actionare pe baza de motoare electrice pas cu pas aduc avantaje constructive si functionale fata de sistemele de pozitionare de comanda numerica in sensul ca sunt mai simple si necesita echipamente de comanda de complexitate mai redusa si deci mai ieftine.
Se mentioneaza ca de dimensionarea energetica corecta a sistemului precum si de exploatarea rationala, in cadrul unor limite riguros determinate, depind performantele obisnuite.
Motoarele electrice pas cu pas sunt disponibile intr-o larga varietate de forme si marimi, acestea fiind clasificate dupa mai multe criterii: principiul de actionare, numarul de poli si unghiul de pas, configuratia circuitului de alimentare, metoda de comanda si cea de fortare a curentului in faze.
In continuare sunt prezentate schemele bloc de comanda ale sistemelor numerice cu actionare prin motoare pas-cu-pas (Fig. 18).
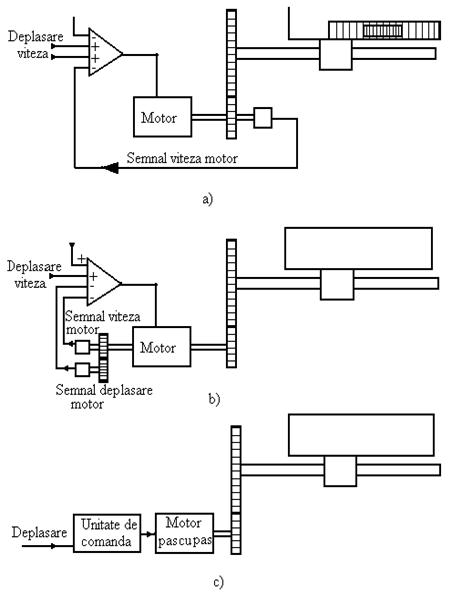
Fig.18 Schema bloc de comanda a sistemelor de actionare cu motoare electrice pas cu pas
Aceste sisteme functioneaza pe baza corelatiei biunivoce intre functia semnal de intrere si functia deplasare element mobil. Semnalul de intrare este definit de numarul de impulsuri generate de echipament, amplificate si transmisa spre fazele motorului electric pas cu pas, si de legea de variatie a acestora cu variabila independenta- timp.
Din figura 18:
In cazul a) sistemul este prevazut cu doua bucle de reactie: cea de viteza masurata la arborele motor si cea de deplasare masurata la elementul mobil actionat.
In cazul b) traductorul de masurare a deplasarii se poate monta in imediata vecinatate a axului motorului. In acest caz traductorul de deplasare, fiind rotativ, poate fi rezolver sincron.
In cazul c) al sistemelor deschise precizia si siguranta miscarii elementului condus este determinata de siguranta executarii comenzii de catre motor, precum si de precizia elementelor componente ale mecanismului.
3 ACTIONAREA HIDRAULICA
Actionarea hidraulica este destul de des utilizata in actionarea robotilor .
Actionarea hidraulica este foarte asemanatoare cu cea pneumatica diferenta principala constind in faptul ca se utilizeaza ca agent de actionare uleiul hidraulic si nu aerul. Acest lucru da posibilitatea dezvoltarii fortelor mai mari de actionare si o rigiditate crescuta a sistemului hidraulic (lichidul este mai putin compresibil in comparatie cu aerul).
Dezavantajele actionarii hidraulice sunt[2]:
randamentul global mai scazut decit in cazul actionarii electrice
necesitatea existentei unor instalatii speciale de preparare a agentului hidraulic, fapt ce mareste complexitatea si creste costul
necesitatea utilizarii conductelor si furtunelor de alimentare precum si problemele pe care le ridica etansarea elementelor
In figura 19 se poate vedea, actionarea hidraulica seamana principial cu cea pneumatica, fiind insa necesare alte citeva elemente indispensabile cum ar fi: filtre de ulei, pompe de ulei, distribuitoare pentru ulei, elemente pentru reglarea presiunii si elemente atenuatoare de pulsatii de presiune etc..
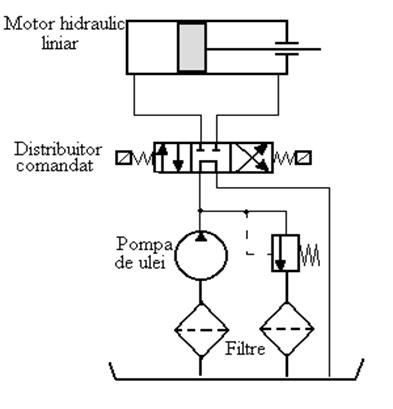
Fig.19 Schema principiala de actionare hidraulica
In cazul utilizarii unui sistem de comanda hidraulic secvential se recurge la legarea in serie a mai multor astfel de sisteme prezentate in figura de mai sus. Limitarea marimii curselor poate fi realizata mecanic, prin tamponare rigida (rezulta precizie foarte buna), sau electromecanic, unde capetele curselor sunt "comandate" de catre senzori care modifica starea distribuitoarelor.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3970
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved