| CATEGORII DOCUMENTE |
| Agricultura | Asigurari | Comert | Confectii | Contabilitate | Contracte | Economie |
| Transporturi | Turism | Zootehnie |
| Navigatie |
1.1 GENERALITATI
In principiu, orientarea pe mare presupune determinarea continua si precisa a directiei de deplasare a navei, precum si a pozitiilor succesive ocupate de nava. Acest lucru nu ar fi posibil fara modelarea la bord a meridianului adevarat al locului (adica directia Na), care este directia de referinta din planul orizontului adevarat fata de care se realizeaza orientarea.
Directia Na se materializeaza la bordul navei cu ajutorul compasului care poate fi magnetic sau giroscopic, functie de principiul fizic ce sta la baza constructiei aparatului. Exista si alte tipuri de compase pentru utilizari speciale cum sunt astrocompasul (sau compasul solar) care se utilizeaza in zonele polare, si compasul giromagnetic, cu utilizari la navele rapide ori la bordul aeronavelor.
1.2. MAGNETISMUL TERESTRU. DECLINATIA MAGNETICA
Se defineste magnetismul ca fiind proprietatea anumitor minerale cu continut de Fe de a atrage mase metalice (Fe, Ni, Co, Cr, etc.); un corp metalic avand aceasta proprietate se numeste magnet natural. Oxidul de fier (Fe3O4), cunoscut si sub numele de magnetita, este cel mai cunoscut magnet natural.
Magnetii artificiali sunt masele metalice cu proprietati magnetice dobandite pe cale artificiala (printr-un procedeu industrial oarecare). Magnetizarea nu produce modificari fizice ori chimice materialului fata de care se manifesta.
Se numeste fier tare din punct de vedere magnetic, acel material care, supus actiunii unui camp magnetic, isi pastreaza proprietatile magnetice dobandite, o lunga perioada de timp; acesti magneti se numesc magneti permanenti.
Se defineste fierul moale din punct de vedere magnetic, ca fiind materialul care, supus actiunii unui camp magnetic, nu isi pastreaza proprietatile magnetice decat pe timpul procesului de magnetizare. Acesti magneti se numesc magneti temporari. Se definesc urmatoarele proprietati fundamentale ale magnetismului:
orice magnet, indiferent de forma pe care o are, are doi poli magnetici: polul nord (sau pozitiv) si polul sud (sau negativ); la bordul navei, magnetii utilizati pentru compensarea compasului magnetic sunt piturati dupa urmatorul cod: rosu jumatatea nordica si albastru cea sudica. Cele doua portiuni polarizate diferit ale unui magnet sunt separate de o zona neutra din punct de vedere magnetic; de asemenea, se defineste axa magnetica a unui magnet ca fiind dreapta ce uneste cei doi poli magnetici(fig.1a).
daca un magnet se rupe in mai multe bucati, fiecare dintre acestea capata proprietatile unui magnet;
daca un magnet permanent se apropie cu polul nord de un magnet moale ori de o masa metalica nemagnetizata, atunci aceasta din urma se va magnetiza formand un pol magnetic sud la capatul sau expus magnetizarii;
spectrul magnetic se defineste ca fiind totalitatea liniilor de camp magnetice; acestea au forma unor curbe care sunt dispuse in plane diferite si au urmatorul sens conventional: ies din polul nord magnetic si intra in polul sud magnetic;
doi magneti aflati unul fata de celalalt la o distanta suficient de mica, vor actiona reciproc astfel:
o polii de acelasi nume se vor respinge;
o polii de nume contrare se vor atrage;
Sunt analizate mai jos proprietatile directive ale acului magnetic (se intelege prin ac magnetic, un magnet de forma din fig.1b ).
Acul magnetic liber suspendat in centrul sau de greutate, supus actiunii unui camp magnetic uniform, se va comporta astfel:
se va orienta pe linia de camp magnetic care trece prin centrul sau de greutate. Daca linia de camp este curba, atunci acul magnetic se va orienta pe directia tangenta la linia de camp magnetic ce trece prin centrul sau de greutate.
polul nord al acului magnetic se va orienta catre polul sud al magnetului inductor (fig.2).
a) bara magnetica b) ac magnetic
Fig.1 Proprietatile magnetilor permanenti
[Fig.2] Actiunea campului magneticasupra acului magnetic
S-a notat cu ![]() intensitatea campului magnetic.
intensitatea campului magnetic.
Este cunoscut faptul ca Pamantul are proprietati magnetice, comportandu-se ca un urias magnet sferic. El are doi poli, o axa magnetica, o linie neutra, linii de camp. Datorita acestor proprietati, este posibil ca un ac magnetic liber suspendat in centrul sau de greutate, plasat la suprafata sferei terestre intr-un loc indepartat de alte mase magnetice, sa se orienteze (dupa cateva oscilatii) pe o directie stabila in spatiu.
Forta care actioneaza asupra acului magnetic este intensitatea campului magnetic terestru.
Cercetarile au relevat faptul ca pozitia polilor magnetici terestri nu coincide cu cea a polilor geografici; astfel, in 1972 coordonatele polilor magnetici erau urmatoarele (Balaban, 1972):
polul nord magnetic LAT = 071˚ 00.0 N ;
LON = 096˚ 00.0 W ;
polul sud magnetic LAT = 073˚ 00.0 S ;
LON = 156˚ 00.0 E .
Observand coordonatele geografice se constata ca un pol magnetic nu se afla la antipodul celuilalt, deci axa polilor magnetici nu trece prin centrul sferei terestre; axa polilor magnetici are o inclinare de aproximativ 11 3/4 fata de axa polilor geografici.
In fig.3 sunt evidentiate elementele campului magnetic terestru precum si modul de orientare a unui ac magnetic liber suspendat in centrul sau de greutate, plasat la suprafata sferei terestre.
In scopul de a se mentine denumirea polilor magnetici in functie de emisfera geografica in care se afla, s-au stabilit in mod conventional ca in polul nord magnetic terestru sa se afle concentrata intreaga masa magnetica sudica si invers, pentru a nu modifica denumirea polaritatii acelor magnetice.Astfel, ca urmare a acestei conventii, acul magnetic se va orienta cu polul sau nordic catre polul nord magnetic terestru.
[Fig.3] Campul magnetic terestru
S-au facut urmatoarele notatii:
HH' - planul orizontului adevarat al observatorului;
PNm - polul nord magnetic terestru;
PSm - polul sud magnetic;
PN - polul nord geografic;
PS - polul sud geografic;
N - polul magnetic nord al acului magnetic;
S - polul magnetic sud al acului magnetic.
Considerand acul magnetic suspendat liber in centrul sau de greutate in punctul A la o latitudine oarecare, fara influente magnetice din exterior, se observa ca acesta se orienteaza pe directia tangentei la linia de forta a campului magnetic terestru ce trece prin punctul considerat, adica se va orienta cu polul sau N catre polul nord magnetic terestru (PNm). Aceasta directie (NS) face cu planul orizontului adevarat al observatorului (HH') un unghi notat cu (q) si care se numeste inclinatie magnetica. Daca polul nord al acului magnetic (N) se afla sub orizont, atunci q se considera pozitiv. Daca se deplaseaza acul magnetic catre polul nord magnetic, valoarea inclinatiei magnetice creste (punctul B), astfel ca in polul nord magnetic aceasta ia valoarea maxima, +90 (punctul C). Daca se deplaseaza acul magnetic catre sud, valoarea inclinatiei magnetice scade, astfel ca pentru pozitia D pe ecuatorul magnetic, inclinatia magnetica este nula. Se poate deduce astfel definitia ecuatorului magnetic ca fiind locul geometric al punctelor de pe suprafata sferei terestre cu inclinatia magnetica egala cu zero.
Ecuatorul magnetic este o curba neregulata pozitionata in vecinatatea ecuatorului geografic.
Curbele de egala inclinatie magnetica se numesc izocline. Prin analogie cu paralelele geografice, izoclinele mai sunt denumite si paralele magnetice, iar inclinatia magnetica se mai numeste si latitudine magnetica.
In concluzie, inclinatia magnetica este o marime unghiulara ce ia valori de la 000 la 090, pozitiva in emisfera nord magnetica si negativa in emisfera sud magnetica.
Se definesc izodinamele ca fiind locul geometric al punctelor de pe suprafata sferei terestre cu aceeasi valoare a intensitatii campului magnetic terestru.
Este evident ca, datorita necoincidentei polilor magnetici cu cei geografici, acul magnetic se va orienta pe directia polului nord magnetic, numita directia nord magnetic (Nm), care nu este identica cu directia Na.
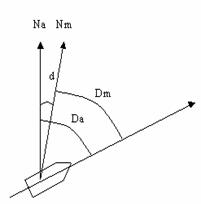
Planul determinat de axa polilor magnetici PNm-PSm si punctul navei se numeste planul meridianului magnetic. Urma lasata de acest plan pe planul orizontului adevarat, este chiar directia Nm (fig.4

[Fig.4 ] Declinatia magnetica
Se defineste declinatia magnetica (d), ca fiind unghiul din planul orizontului adevarat al observatorului, cu varful in centrul acului magnetic, masurat de la meridianul adevarat catre meridianul magnetic.
Declinatia magnetica ia valori semicirculare, de la 000 la 180 catre est, si de la 000 la 180 catre vest.
Declinatia magnetica este estica sau pozitiva atunci cand meridianul magnetic se afla la est de meridianul adevarat, si vestica sau negativa cand meridianul magnetic se afla la vest de meridianul adevarat.
De asemenea, declinatia magnetica se exprima in grade si zecimi de grad. In harti valoarea declinatiei este data de cele mai multe ori in grade si minute, insa pentru calculele de navigatie este necesara transformarea in grade si zecimi de grad, deoarece, in general, drumurile si relevmentele se exprima in grade si zecimi de grad.
Curba de pe suprafata sferei terestre care uneste puncte cu aceeasi valoare a declinatiei magnetice se numeste izogona. Izogona de declinatie zero se numeste agona.
La bordul navei, acul magnetic este mentinut in permanenta in planul orizontului, si ca urmare doar componenta orizontala H poate fi considerata componenta directiva a acului magnetic.
Ca urmare a faptului ca intensitatea campului magnetic terestru este variabila (datorata neomogenitatilor structurii interne a Pamantului), rezulta ca si valoarea declinatiei magnetice difera de la o zona la alta.
Mai mult, s-a stabilit pe baza unor masuratori extrem de precise, ca intr-un punct oarecare al suprafetei terestre, valoarea declinatiei magnetice variaza in timp. Exista variatii zilnice, anuale si seculare ale declinatiei magnetice. In navigatie intereseaza doar variatia anuala.
Pe hartile marine sunt date, sub forma unei roze de declinatie (fig.5) informatii cu privire la :
valoarea declinatiei pentru anul editarii hartii (in fig.4,d=1135'W=-1135'=-11 6);
variatia anuala a declinatiei; poate fi crescatoare sau descrescatoare, si se da intotdeauna in minute. Informatia este utila pentru calculul valorii declinatiei pentru anul in curs (in fig.4, declinatia scade anual 8').
[Fig.4
] Roza de declinatie magnetica [Fig.5 ]
Relatia dintre drum adevarat si drum magnetic
OBSERVATIE : pe hartile englezesti, sunt utilizati urmatorii termeni:
* variation = declinatie magnetica;
* increasing = crestere ;
* decreasing = descrestere .
Inscriptia de pe roza de declinatie din fig.4 trebuie interpretata astfel: "declinatia pentru anul 1959 este d1959 = -1135', scade anual 8' "
Pe hartile romanesti, in interiorul rozei se gaseste urmatorul tip de inscriptie: 'd1987=352'E (4'E) ', care trebuie interpretata astfel 'declinatia magnetica in anul 1987 este d1987 = +352',creste anual 4' '.
In problemele de navigatie este necesara actualizarea declinatiei magnetice, adica determinarea valorii declinatiei magnetice pentru anul in curs. Pentru aceasta, trebuie retinut ca expresiile: 'creste' si 'descreste' se refera la valoarea absoluta a declinatiei data in roza.
Sa se actualizeze (deci sa se calculeze pentru anul 2007) valoarea declinatiei inscrisa in fig.4.
Actualizarea declinatiei se va face intotdeauna dupa urmatorul tip de calcul :
Calculul d2007
d1959 = -1135'
var(8'
d2007 = -0511'
= -05
Este deci evident faptul ca expresia descreste semnifica faptul ca incepand cu 1959 declinatia scade in valoare absoluta. Acesta este si motivul pentru care se pune semnul + variatiei (linia a doua a calculului) si nu semnul -, asa cum am fi tentati (dat fiind termenul 'descreste anual 8').In concluzie, in fata valorii variatiei se va pune semnul + sau -, astfel incat sa fie satisfacuta conditia de descrestere in valoare absoluta.
Se defineste notiunea de drum magnetic (Dm) ca fiind unghiul din planul orizontului adevarat al observatorului masurat de la directia nord magnetic (Nm) pana la axul longitudinal al navei (fig.5).
Relatia dintre drumul adevarat si drumul magnetic este:
Da = Dm + d ,
relatie algebrica (deci declinatia intra in relatie cu semnul sau algebric).
2.1. MAGNETISMUL NAVEI. DEVIATIA MAGNETICA
Consideratiile facute asupra comportarii acului magnetic in campul magnetic terestru au avut ca premiza fundamentala lipsa oricarei forte magnetice deviatoare a acestuia. La bordul navei insa, datorita actiunii campului magnetic propriu al navei, acul magnetic va fi deviat de la directia Nm.
Campul magnetic propriu al navei este campul magnetic indus in masele metalice ale navei de catre campul magnetic terestru.
Se vor considera urmatoarele ipoteze simplificatoare:
campul magnetic terestru este unica forta magnetica inductoare la bordul navei;
campul magnetic terestru se considera a fi uniform;
din punct de vedere magnetic, masele metalice din structura navei se vor cosidera de doua categorii: mase de fier tare si mase de fier moale;
polul nord al campului magnetic indus in masele metalice ale navei (de catre campul magnetic terestru) se va considera in zona in care actioneaza polul nord terestru; de asemenea, acest camp magnetic indus se considera a fi uniform;
Fierul moale (din punct de vedere magnetic) de la bord se magnetizeaza instantaneu sub actiunea campului inductor terestru, dar isi pierde aceste proprietati la incetarea actiunii inductive; magnetismul indus in fierul moale de la bord genereaza campul magnetic temporar al navei.
Vectorul intensitatii campului magnetic temporar al navei se noteaza cu Pt, si experimental, s-a constatat ca depinde de drumul magnetic si de latitudinea (magnetica) la care se naviga.
Fierul tare (din punct de vedere magnetic) de la bord prezinta proprietatea de a se magnetiza intr-un timp indelungat (sub actiunea campului magnetic terestru) si de a-si pastra proprietatile magnetice dobandite o lunga perioada de timp. Magnetismul indus in fierul tare de la bord genereaza campul magnetic permanent al navei.
Forta coercitiva (forta de rezistenta la magnetizare) a fierului tare este mult mai mare decat a fierului moale, ceea ce face ca procesul de magnetizare a fierului tare sa fie indelungat, iar proprietatile magnetice dobandite de acesta sa se mentina o lunga perioada de timp, sau sa devina permanente.
Campul magnetic permanent se formeaza in perioada de constructie a navei, cand masele de fier tare sunt mentinute timp indelungat in pozitie fixa fata de liniile de camp magnetic terestru.
Intensitatea campului magnetic permanent depinde de:
orientarea calei pe care a fost construita nava fata de meridianul magnetic (adica Dm);
latitudinea magnetica a locului de constructie;
tehnologia de constructie folosita (sudura, nituire, etc.).
Dupa armarea navei si intrarea ei in exploatare, se considera ca procesul de formare a campului magnetic (temporar si permanent) este incheiat.
Vectorul intensitate a campului magnetic permanent Pp se considera avand o directie fixa in nava.
Se defineste vectorul intensitate a campului magnetic al navei P, vectorul suma a vectorilor Pp si Pt :
P = Pp + Pt
Cu alte cuvinte, definim campul magnetic al navei ca fiind suma campurilor magnetice permanent si temporar ale navei.
In fig.6 este reprezentata pozitia acestor vectori fata de sistemul de referinta trirectangular OXYZ cu originea in centrul de suspensie al acului magnetic de la bord; planul XOY se confunda cu planul orizontului adevarat, iar axa OZ se confunda cu verticala punctului O.
Se defineste vectorul P' ca fiind proiectia vectorului intensitate a campului magnetic al navei P in planul orizontului adevarat.
Campul magnetic al navei (reprezentat in planul orizontului adevarat de componenta sa orizontala P') preia caracteristicile celor doua componente, si anume:
are o directie fixa in nava (fata de sistemul de referinta OXYZ), indiferent de drumul navei;
are o intensitate variabila, functie de drumul magnetic si de latitudinea magnetica la care se naviga.
[Fig. 6 ] Campul magnetic al navei [Fig.7 ] Directia Nc
La bordul navei, acul magnetic liber suspendat in centrul sau de greutate O se va afla in permanenta sub influenta adoua campuri magnetice, materializate de componentele orizontale ale intensitatii lor (fig.7):
campul magnetic terestru, prin componenta orizontala a intensitatii (notata cu H), care are ca suport directia Nm;
campul magnetic propriu al navei, prin componenta sa orizontala (notata cu P'), cu directie fixa in nava;
OBSERVATIE: Sistemul de ace magnetice este astfel dispus la bord, incat sa se mentina permanent in planul orizontului adevarat. Acesta este motivul pentru care se iau in considerare doar componentele orizontale ale celor doua intensitati.
Ca urmare a actiunii simultane a componentei orizontale a campului magnetic terestru H si a componentei orizontale a campului magnetic al navei P', acul magnetic montat la bordul navei se va orienta pe directia vectorului rezultant al celor doi vectori, notat cu H' (fig 7) si numit forta directiva a acului magnetic.
Planul vertical determinat de suportul vectorului forta directiva a acului magnetic se numeste planul meridianului compas; acest plan determina pe planul orizontului o dreapta numita meridian compas. Semidreapta nordica a meridianului compas se numeste directia nord compas si se noteaza cu Nc.
Drumul compas (Dc) al navei este unghiul din planul orizontului adevarat, masurat de la directia Nc la axul longitudinal al navei. Drumul compas se exprima, de regula, in sistem circular, deci ia valori de la 000 la 360 in sens retrograd.
Se defineste deviatia magnetica (dc) ca fiind unghiul din planul orizontului adevarat, masurat de la directia Nm la directia Nc (fig.7). Se exprima semicircular, luand valori de la 000 la 180 catre est (si va primi semnul algebric +), sau de la 000 la 180 catre vest, (si va primi semnul algebric -). In fig.7, directia Nc se gaseste la est fata de directia Nm, ca urmare este estica si va primi semnul +.
Deviatia magnetica se exprima la precizie de zecime de grad.
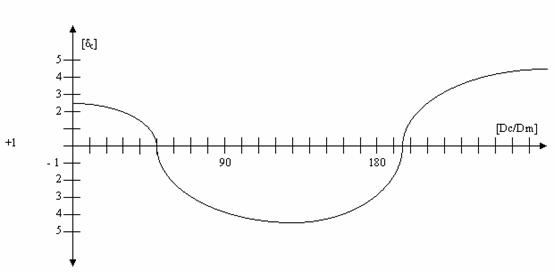
Ca urmare a faptului ca suportul vectorului P' este fix in raport cu nava, rezulta ca valoarea deviatiei magnetice variaza cu drumul magnetic (respectiv compas) al navei. In fig.8 este reprezentat modul de variatie al deviatiei magnetice functie de 4 drumuri, corespunzatoare celor 4 cadrane de orizont:
La bordul navei, influenta deviatoare a campului magnetic al navei este importanta, astfel ca deviatia compas (dc) poate lua valori foarte mari. Operatiunea de reducere a deviatiei se numeste compensare.
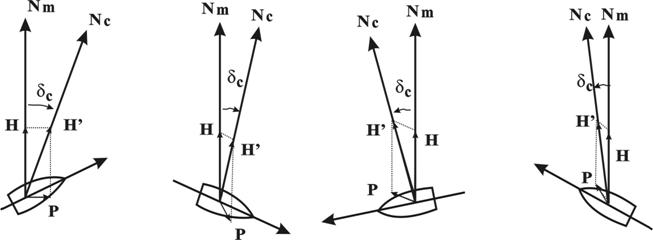
[Fig.8 ] Variatia deviatiei magnetice functie de drumul magnetic/compas al navei
Ca mijloace de compensare, la bordul navei se utilizeaza magneti permanenti pentru compensarea fortei deviatoare a campului magnetic permanent si corectori din fier moale pentru compensarea fortelor deviatoare produse de actiunea campului magnetic temporar.
Magnetii permanenti si corectorii de fier moale folositi pentru compensarea compasului magnetic se dispun astfel fata de roza compasului, incat sa genereze, in diferite drumuri ale navei, campuri magnetice egale si de sens contrar cu campurile magnetice ale navei.
Deviatiile magnetice ramase in urma compensarii se determina experimental la bordul navei prin metode costiere, astronomice sau prin compararea drumurilor indicate de compasul giroscopic si compasul magnetic (pentru aceeasi orientare a axului longitudinal al navei). Deviatiile astfel determinate se inregistreaza in tabela de deviatii, care este un tabel ce contine pe prima coloana valorile de drum magnetic sau drum compas din 10 in 10, iar pe a doua coloana valorile deviatiei magnetice corespunzatoare acestor drumuri.
Tabela de deviatie se intocmeste de regula in cadrul probelor de mare (sau ori de cate ori este nevoie), si se afiseaza in camera hartilor. La navele comerciale ce transporta minereuri ori materiale feroase, se intocmesc doua tabele de deviatie, pentru fiecare stare de incarcare in parte.
Pentru exemplificare, se da mai jos o tabela de deviatii magnetice, continand valori fictive, avand doar utilitate didactica, si care va fi utilizata in rezolvarea viitoarelor aplicatii de navigatie:
Tabela de deviatii magnetice
Dc/Dm |
dc |
Dc/Dm |
dc |
|
10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 |
+2.3 +1.3 +1.0 +0.5 0.0 -0.7 -1.5 -2.0 -2.7 -3.3 -3.7 -4.0 -4.3 -4.0 -3.7 -3.3 -2.5 -1.7 |
190 200 210 220 230 240 250 260 270 280 290 300 320 330 340 350 360 |
-1.7 +0.3 +1.3 +2.7 +3.5 +4.0 +4.3 +4.5 +4.5 +4.3 +4.0 +3.7 +3.5 +3.0 +2.7 +2.5 +2.3 |
Tabelele de deviatii magnetice se intocmesc la bord pentru fiecare compas magnetic in parte.
Alaturi de tabela de deviatii, in camera hartilor se afiseaza si diagrama deviatiilor compas functie de drumul magnetic/compas. In fig. 9 este reprezentata aceasta diagrama ridicata pentru valorile continute in tabela de deviatii de mai sus.
[ fig. 37 ] . Variatia armonica a deviatiei functie de Dm/Dc
[Fig 9] Diagrama de deviatii magnetice
Deviatia magnetica are o variatie armonica si este exprimata de ecuatia:
dc = A B sin Dc + Ccos Dc D sin Dc + E cos Dc
denumita ecuatia aproximativa a deviatiei sau ecuatia lui Smith. Este denumita "ecuatia aproximativa a deviatiei' deoarece se verifica numai la deviatii magnetice mici, nedepasind valoarea de 20; "ecuatia exacta a deviatiei' este o expresie complexa, care nu are valoare aplicativa la compasurile compensate. Ecuatia lui Smith satisface cerintele calcularii deviatiilor la bord, deoarece in mod normal la un compas magnetic valoarea acestora nu depaseste 5
La navele de transport maritim, deviatiile magnetice pot prezenta variatii fata de cele determinate in cadrul probelor de mare, in urmatoarele situatii:
la traversade oceanice, cand se mentine timp indelungat acelasi drum;
la schimbarea semnificativa a pozitiei anumitor mase metalice de la bord (gruie, bigi) sau la ambarcarea de mase metalice;
la variatii mari de temperatura suferite de corpul navei (sudura, indreptare la cald, etc.);
cand nava stationeaza timp indelungat in aceeasi directie (la cheu, pentru operatiuni de incarcare sau descarcare, pe doc etc.);
la schimbarea pozitiei maselor de fier de la bord (bigi, gruie etc), fata de cea avuta la determinarea deviatiilor. De aceea, pe timpul determinarii deviatiilor toate masele de fier trebuie sa fie puse la "postul de mare', pozitii care trebuie mentinute si pe timpul navigatiei;
utilizarea de macarale electromagnetice la incarcarea sau descarcarea navei. Pe timpul unor asemenea operatiuni se impune scoaterea cutiei compasurilor de la bord si pastrarea la uscat, pentru protejarea sistemului magnetic al rozelor si a dispozitivelor de suspensie a rozei;
cand corpul navei este supus la vibratii puternice: la andocarea navei , cand se executa operatiuni de ciocanire, nituire, raschetare etc.; cand au loc explozii la bord; la esuari pe fund de natura dura etc.;
Ca urmare, se impune, ca pe timpul navigatiei, sa se execute, ori de cate ori este posibil, controlul deviatiei magnetice printr-un procedeu oarecare (costier, astronomic, etc.);
CURSUL 8
2.2. COMPASUL MAGNETIC
2.2.1. DESCRIEREA COMPASULUI MAGNETIC
Destinatia compasului magnetic este de a materializa la bordul navei directia nord compas.
In principiu, partile componente ale oricarui compas magnetic sunt (fig.38) :
cutia compasului cu sistemul cardanic (1) ;
postamentul compasului (2) ;
dispozitivul de compensare a deviatiei compas (B,C,D,J);
habitaclul;
instalatia de iluminare
[Fig 10a ] Compasul magnetic, parti componente [Fig 10b ] Cutia compasului magnetic
Cutia compasului (fig.10) se sprijina pe doua puncte (15) de pe cercul cardanic, astfel ca se poate roti in planul longitudinal al navei; la randul sau, cercul cardanic se sprijina in doua puncte pe postamentul compasului, astfel ca intregul ansamblu cutie-cerc cardanic poate executa o rotatie in planul transversal al navei. Acest sistem cardanic permite deci cutiei compasului sa execute miscari atat in plan transversal cat si in plan longitudinal, miscari ce au rol de compensare a ruliului si tangajului navei.
Elementul sensibil (adica elementul care se orienteaza efectiv pe directia Nc) este sistemul de ace magnetice (1). Aceste ace magnetice, de forma cilindrica si intotdeauna in numar par, sunt sudate pe roza compasului (3), care este un disc din material amagnetic, gradat de la 000 la 360, si pe care se citesc Dc si Rc.
De roza (3) este sudat un flotor (2), care are rol de a reduce forta de apasare a sistemului ace magnetice-roza pe pivotul (5). Pivotul sprijina sistemul roza-ace magnetice pe o piesa numita cesculita (4).
La compasele magnetice moderne, cutia compasului este plina cu un lichid cu compozitia: 43% alcool + 57% apa distilata, cu rol de amortizare a oscilatiilor rozei, provocate de ruliu si tangaj, precum si de reducere a frictiunii rozei (3) pe pivotul (5), (datorita fortei de impingere hidrostatica exercitata de lichid asupra flotorului (2)). Aceste compase magnetice se numesc compase umede. Exista si compase magnetice care nu utilizeaza lichid de sustinere in cutia compasului, numite compase uscate.
Cutia compasului este formata din doua compartimente A si B, lichidul comunicand intre ele prin orificiile practicate in peretele separator (7); in camera superioara A se gasesc, in afara ansamblului roza-flotor-sistem de ace magnetice, doua fire reticulare (8) dispuse intr-un plan paralel cu planul longitudinal al navei, iar dreapta determinata de cele doua fire se numeste linie de credinta.
In dreptul firului reticular dinspre prova al liniei de credinta, se citeste, pe roza, valoarea drumului compas
Este preferabil ca linia de credinta sa se gaseasca chiar in planul longitudinal al navei, pentru ca influentele deviatoare sa fie simetrice. De regula, la bordul navelor aceasta conditie este satisfacuta, compasele magnetice fiind montate chiar in planul longitudinal.
Camera inferioara B, are peretele inferior (9) construit dintr-o membrana elastica. Acesta are rolul de a ceda la dilatarea lichidului de suspensie, si apoi de a reveni la contractia acestuia, evitand in acest mod formarea bulelor de aer in lichid. Calota inferioara (10) a camerei inferioare este prevazuta cu o greutate (11) si un bec (12). Greutatea asigura stabilitatea la ruliu si tangaj a cutiei compasului, iar becul asigura iluminarea fetei inferioare a rozei. La partea superioara, cutia se inchide ermetic cu un geam (13), fixat pe cutie cu un cerc azimutal (14), gradat pe fata exterioara de la 000 la 360 din grad in grad, si care serveste la masurarea relevmentelor prova, cu ajutorul unei alidade montate pe acesta.
Roza compasului, impreuna cu sistemul de ace magnetice formeaza elementul sensibil al compasului magnetic, si este format din (fig.11):
discul sau roza propriu-zisa (1), gradata in sistem circular, de la 0000 la 360, pe care se fac citirile de drum compas; este confectionata din material amagnetic;
flotorul (2), prevazut in
partea inferioara cu o scobitura de forma conica
numita cesculita (4,
fig.10b); in varful conului se afla montata o piatra dura, bine
slefuita pe care se sprijina pivotul (5, fig.10b) cutiei compasului ;
[Fig.11 ] Roza, flotorul si sistemul de ace magnetice
sistemul de ace magnetice (3), format intotdeauna dintr-un numar par de ace magnetice dispuse paralel; axa longitudinala de simetrie a sistemului de ace magnetice al rozei, se orienteaza in permanenta in meridianul compas ce trece prin centrul rozei
Trebuie precizat ca sistemul de ace magnetice se monteaza intotdeauna la partea inferioara a flotorului, pentru a cobori centrul de greutate al sistemului roza-ace magnetice, si deci pentru a mentine roza in planul orizontului adevarat; de asemenea, trebuie cunoscut ca volumul flotorului este calculat de asa maniera, incat roza compasului cu flotorul si acele magnetice sa se mentina in plutire cu o flotabilitate usor negativa, exercitand o anumita presiune asupra pivotului.
Postamentul compasului (2, fig.10a) este construit dintr-un material amagnetic; partea superioara a postamentului se numeste guler si de el se monteaza, prin sistemul cardanic, cutia compasului.
Dispozitivul de compensare (B,C,D si J, fig.10a) este format din:
magneti permanenti longitudinali, numiti magneti B, (3, fig.10a);
magneti permanenti transversali, numiti magneti C.
corectorul de banda (J) este un magnet vertical, iar distanta lui fata de roza se regleaza cu ajutorul unui lantisor amagnetic. Actiunea corectorului de banda asupra rozei in vederea compensarii este functie de distanta acestuia fata de roza, si de orientarea polului sau nord. Astfel, in emisfera nordica, corectorul de banda se va orienta cu polul sau nord in sus, iar la trecerea in emisfera sudica, corectorul de banda se va orienta cu polul sud in sus.
corectorii de fier moale (D).
La bordul navelor, indiferent de tipul lor, sunt instalate compase magnetice etalon si de drum. Compasul etalon este montat pe puntea etalon, in planul diametral al navei. In aceasta pozitie, compasul etalon este ferit de influente deviatoare puternice, si, in plus, ofera posibilitatea masurarii relevmentelor compas sau prova.
Compasul magnetic de drum este montat in timonerie, in prova timonierului, si constituie, alaturi de repetitorul de drum al girocompasului, instrumentul dupa care se face guvernarea navei.
Deoarece instalarea compasului de drum implica restrictii in amenajarea timoneriei precum si dificultati la compensare, s-au realizat compase cu reflexie. Toate navele moderne sunt utilate cu compase cu reflexie (reflector compass), fig.12.
Compasul magnetic cu reflexie reprezinta o adaptare ergonomica a compasului etalon pentru o dubla functie: de compas etalon si de compas de drum. Pentru receptarea imaginii rozei compasului de catre timonier in timonerie, aceasta este gradata pe ambele fete; tubul telescopic (1) trece prin puntea etalon si este plasat astfel incat partea sa inferioara, prevazuta cu o oglinda reglabila (2) sa fie observata de la timona. Receptionarea unei imagini clare a rozei in timonerie este asigurata de un sistem de lentile montate in tubul telescopic.
Habitaclul este capacul de protectie al compasului (3, fig.12), si este confectionat din material amagnetic.
Sistemul de iluminare asigura citirea indicatiilor de drum si a valorilor de relevment pe timp de noapte.
[Fig.12 ] Compasul magnetic cu reflexie
2.2.2. UTILIZAREA COMPASULUI LA BORD
Proprietatea rozei compasului magnetic de a se mentine orientata permanent in planul orizontului adevarat pe directia nord compas, permite utilizarea compasului magnetic pentru materializarea unei directii de referinta la bordul navei.
Gradatia 0000 de pe roza compasului magnetic materializeaza directia Nc, in timp ce linia de credinta LL' materializeaza axul longitudinal al navei. Oricum ar gira nava, linia 0000-1800 (adica linia N-S) va ramane tot timpul fixa in orizont.
Timonierul, pentru a mentine un anumit drum (ordonat de ofiterul de cart), trebuie sa vina la stanga sau la dreapta, astfel incat linia de credinta prova (L) sa se mentina permanent in dreptul gradatiei corespunzatoare de pe roza.
Se defineste drumul compas al navei, ca fiind unghiul din Planul Orizontului Adevarat al Observatorului masurat de la directia Nc pana la axul prova al navei (fig.13). Ia valori de la 0000 pana la 360, si se masoara in sens retrograd.
Un parametru important in aprecierea preciziei de reprezentare a drumului compas, il reprezinta sensibilitatea rozei compasului, care este unghiul minim (e) de abatere a rozei de la directia meridianului compas, la care momentul directiv mai este capabil sa o readuca in meridianul compas. La unghiuri de rotire a rozei mai mici decat e, momentul directiv devine atat de mic, incat este anulat de frecarea rozei de pivot.
[Fig.13 ] Drum
compas. Relevment compas. Relevment prova.
La bordul navelor maritime, drumul compas se tine la precizie de 000.5, valoare care reprezinta sensibilitatea rozei compasului magnetic. Aceeasi precizie de masurare o au si relevmentele compas masurate la compasul magnetic.
Pentru micsorarea valorii sensibilitatii rozei, deci pentru ridicarea preciziei de indicare a compasului, se impune ca :
lungimea acelor magnetice sa fie suficient de mare (astfel ca valoarea momentului magnetic sa fie mare);
frecarea rozei pe pivot sa fie mica;
In conditii de ruliu pronuntat, componenta verticala R a campului magnetic permanent al navei (fig.14), care pe asieta dreapta nu produce nici un efect deviator, determina prin componenta sa orizontala (Ri = Rsin i), o deviatie a rozei compasului fata de directia Nc, numita deviatie de banda.
Aceasta deviatie se manifesta cand marea este rea, printr-o oscilatie (instabilitate) pronuntata a rozei in plan orizontal, desi nava este stabila pe drum.
Valoarea deviatiei de banda se poate calcula functie de Dm si i (unghi de banda) sau se poate compensa practic, de catre ofiterul cu navigatia, in timpul marsului. Aceasta operatiune se executa cu ajutorul magnetului corector de banda (J).
Ofiterul cu navigatia trebuie sa tina permanent cont de faptul ca odata cu schimbarea semnificativa a latitudinii magnetice, compensarea executata de specialisti nu mai este valabila; acest fapt determina marirea valorii deviatiei de banda. In consecinta, pe mare rea, roza compasului nu mai este stabila pe directia Nc, iar ofiterul de cart nu mai poate citi drumul compas al navei, desi nava este stabila pe drum.
Algoritmul corectarii aproximative a erorii de banda pe timpul marsului este urmatorul:
corectorul de banda (J), asa cum s-a mai precizat, trebuie sa fie plasat cu polul sau N in sus in emisfera nordica si invers, cu polul sau S in sus in emisfera sudica; deci prima operatiune a ofiterului cu navigatia atunci cand constata instabilitate pronuntata a rozei pe mare rea, este sa verifice pozitia corectorului (J) in pontilul compasului;
se ia un drum cat mai apropiat de
0000 sau 1800 cu o aliura fata de val astfel ca
unghiurile de ruliu si tangaj sa fie maxime;
Fig.14 ] Deviatia de banda
3) se deplaseaza corectorul de banda (J) in sus sau in jos astfel ca instabilitatea rozei sa scada; se fixeaza corectorul pe pozitia corespunzatoare celei mai mari stabilitati a rozei. Trebuie avut in vedere ca magnetul corector de banda sa nu se apropie la mai putin de 60 cm de cutia compasului. Acolo unde este nevoie, se poate folosi un corector mai puternic ori mai multi corectori de banda.
Relevmentul compas (fig.13) se defineste ca fiind unghiul din planul orizontului adevarat masurat de la directia nord compas pana la directia de vizare la un reper.
[Fig.15 ] Alidada
simpla
Relevmentul compas se masoara la bord cu ajutorul alidadei simple (fig.44) montate pe cercul azimutal al cutiei compasului. Pentru masurarea relevmentelor compas se orienteaza alidada pe directia reperului astfel incat acesta sa se vada prin crestatura ocularului (1), pe firul reticular (2). Simultan cu orientarea alidadei se citeste valoarea Rc la prisma (3). Relevmentul prova se va citi direct la cercul azimutal prin decuparea (4).
2.3. CORECTIA TOTALA A COMPASULUI MAGNETIC. CONVERTIRI COMPAS
S-a vazut ca pentru orientarea pe mare se opereaza cu notiunile de drum adevarat si relevment adevarat; in plus, ca urmare a faptului ca pe hartile marine sunt trasate meridiane adevarate (directii nord adevarat), se impune ca valorile de drum si relevment masurate la compasul magnetic (Dc, Rc) sa se converteasca in valori adevarate (Da, Ra). Aceste valori se vor trasa ulterior pe harta.
In practica navigatiei se poate ivi situatia inversa, in care ofiterul de cart determina pe harta drumul adevarat ce urmeaza a fi urmat de nava si trebuie sa comande timonierului valoarea drumului compas corespunzator; pentru aceasta trebuie operata transformarea (convertirea) Da in Dc.
Se numeste convertire compas operatiunea de transformare a valorilor de Dc si Rc (citite la compasul magnetic) in valori de Da si Ra, ori invers, de transformare a valorilor de Da si Ra (scoase din harta) in valori de Dc si respectiv Rc.
In fig.16 este reprezentata roza compasului magnetic al unei nave; cu L s-a notat axul longitudinal al navei deci linia de credinta prova (la care se citesc valorile de Dc). Este evident ca prin punctul navei (O) trec cele trei meridiane ale caror semnificatii se cunosc: directia Na, directia Nm si directia Nc. Sunt de asemenea cunoscute semnificatiile notiunilor de declinatie magnetica (d) si de deviatie magnetica (dc);
Se defineste corectia totala a compasului magnetic ( C) ca fiind unghiul din planul orizontului adevarat masurat de la directia Na pana la directia Nc.
Corectia totala a compasului ia valori semicirculare de la 0000 la 1800 catre est, si va primi semnul algebric + (cand directia Nc se afla la est fata de directia Na), sau de la 000 la 180 catre vest, si va primi semnul algebric - (cand directia Nc se gaseste la vest fata de directia Na).
Corectia totala a compasului ( C) se mai poate defini ca fiind suma algebrica a declinatiei magnetice (d) si a deviatiei compas (dc):
In aceasta relatie, atat d, cat si dc, intra cu semnul lor algebric.
Corectia totala a compasului se exprima la precizie de zecime de grad (000.1).
Drumul navei, ca si relevmentul, iau numele meridianului (directiei) de la care se masoara, astfel (fig.16):
- drum adevarat Da ( NaOL) ;
- drum magnetic Dm ( NmOL) ;
- drum compas Dc ( NcOL) ;
- relevment adevarat Ra ( NaOF) ;
- relevment magnetic Rm ( NmOF) ;
- relevment compas Rc ( NcOF) .
Relatiile de convertire compas a drumurilor si relevmentelor sunt:
Da = Dm + d ;. Dm = Da - d ;
Dm = Dc + dc ;.. Dc = Dm - dc ;
Da = Dc + d + dc ; Dc = Da - d - dc ;
Da = Dc + C ;.. Dc = Da - C ;
Ra = Rm + d ;.. Rm = Ra - d ;
Rm = Rc + dc ;... Rc = Rm - dc ;
Ra = Rc + d + dc ;.. Rc = Ra - d - dc ;
Ra = Rc + C ;. Rc = Ra - C ;
[Fig.16 ]
Convertiri compas
De asemenea trebuie facuta precizarea ca in calcule se va opera cu Dc la precizie de 000.1 , avand in vedere ca valoarea ce se comanda timonierului sa fie insa rotunjita la 000.5, ca urmare a faptului ca sensibilitatea compasului magnetic este de 0005.
Exemplu:
La data de 01/01/1996, nava 'N' naviga in Dc=161.0; pe harta, cea mai apropiata roza indica d1985 =00112'W, creste anual 8'. sa se calculeze Da.
Rezolvare: (fig.17)
1) Calculul d2007 2) Calculul Da
d1985 =-001 Dc=161
var(22 dc
d2007 =-004 08' Dm=157
=-004 +d=-004
Da=153
[Fig. 17]
3. DETERMINAREA DIRECTIILOR LA BORD CU COMPASUL GIROSCOPIC.
Compasul giroscopic (se mai numeste girocompas sau compas giro) este un aparat (echipament) de navigatie, a carui destinatie este de a materializa la bordul navei directia nord adevarat (Na) a punctului in care se gaseste nava, fara de care, asa cum s-a precizat, orientarea pe mare nu ar fi posibila.
3.1. PROPRIETATILE GIROSCOPULUI LIBER.
Ca si in cazul compasului magnetic, compasul giroscopic poseda un element sensibil, adica un element component care se orienteaza permanent si stabil pe directia Na. Elementul sensibil la compasul magnetic este roza cu sistemul de ace magnetice, iar la girocompas este un dispozitiv numit giroscop. Giroscopul este compus din: (fig.18)
tor giroscopic (1), corp metalic masiv, avand masa uniform repartizata (prin centrare), capabil in acest mod sa execute o miscare de rotatie in jurul axei sale de rotatie (xx'), numita si axa principala, cu viteza extrem de mare (de ordinul zecilor de mii de rot/min); frecarea in lagare, la viteza de rotatie a torului este mica, practic neglijabila;
sistem cardanic, compus din cercul cardanic orizontal (2), care se poate roti in jurul axei yy' si cercul cardanic vertical (3), orientabil in jurul axei zz'.
[Fig.18] Giroscopul cu trei grade de libertate
Sistemul cardanic permite torului giroscopic sa execute urmatoarele miscari de rotatie:
Evident, giroscopul este prevazut cu un motor de antrenare a torului.
Un asemenea giroscop, a carui axa principala xx' poate lua orice pozitie in spatiu se numeste giroscop liber sau giroscop cu trei grade de libertate.
Proprietatile fundamentale ale giroscopului liber sunt:
INERTIA, este proprietatea giroscopului liber de a-si mentine, in timp, axa de rotatie xx' paralela cu ea insasi, fixa fata de un reper independent de miscarile Pamantului (de exemplu o stea).
Aceasta inseamna ca daca in momentul pornirii giroscopului, axa sa principala ar fi orientata catre o stea, atunci, in timp, axa xx' va urmari in permanenta steaua respectiva in miscarea sa aparenta pe sfera cereasca. Ca urmare, datorita proprietatii de inertie, axa principala a giroscopului va executa, in timp, o miscare aparenta de ridicare si apoi de coborare fata de planul orizontului adevarat.
In concluzie, giroscopul liber nu poate fi utilizat pentru a materializa directia Na, deoarece axa xx' nu este stabila in orizont.
PRECESIA este proprietatea giroscopului liber de a executa o miscare a axei sale principale xx' intr-un plan perpendicular pe planul de actiune al unei forte exterioare F (fig.19).
Precesia se manifesta numai cand torul giroscopic este la turatia nominala, si doar daca forta exterioara F este constanta si suficient de mare; precesia nu se manifesta la socuri ori la forte al caror modul este mic.
Pentru analiza precesiei giroscopice, este necesara definirea urmatoarelor notiuni:
Fie giroscopul din fig.19, al carui tor executa o miscare de rotatie in jurul axei principale xx' la turatia nominala, cu viteza unghiulara w; asupra axei xx' actioneaza forta exterioara F. Ca efect, axa xx' va executa o rotatie in planul xOy (perpendicular pe planul de actiune al fortei), intr-un astfel de sens, incat polul giroscopului (Pg) tinde sa se suprapuna peste polul fortei exterioare (Pf). Aceasta reprezinta regula polilor de stabilire a sensului miscarii de precesie.
[Fig.19 ] Precesia
giroscopica
Conform acestei reguli, vectorul wp va avea suportul perpendicular pe planul miscarii de precesie cu sensul dat de regula burghiului drept.
OBSERVATIE Facand conexiune cu cele studiate la cap.I se poate afirma ca Pamantul se comporta ca un imens giroscop, posedand proprietatile acestuia. Astfel, Pamantul isi mentine, pentru aceasta epoca, axa principala de rotatie (axa polara) aproximativ paralela cu ea insasi, si orientata catre un reper fix, Steaua Polara.
3.2. PRINCIPIUL COMPASULUI GIROSCOPIC
S-a vazut ca principalul neajuns al giroscopului liber este acela ca, sub actiunea inertiei, axa sa principala nu se mentine fixa in orizont pe directia Na, ci isi modifica permanent pozitia fata de aceasta. Exploatand insa si cea de-a doua proprietate a giroscopului liber, si anume precesia, s-a putut realiza un dispozitiv care sa mentina axa xx' permanent in orizont, orientata pe directia Na.
Principial, aceasta se realizeaza prin crearea unei miscari de precesie, care sa se opuna tendintei pe care o are axa xx' de a iesi din orizont ca urmare a proprietatii de inertie.
Miscarea de precesie se realizeaza prin coborarea centrului de greutate al giroscopului; practic, se ataseaza o greutate pe verticala centrului de greutate O al giroscopului, forta de greutate comportandu-se ca forta exterioara si creand efect de precesie. Aceasta miscare de precesie aduce axa xx' a giroscopului permanent pe directia Na.
Prin atasarea greutatii la partea inferioara a giroscopului, se limiteaza un grad de libertate al giroscopului, astfel ca acesta mai este in masura sa execute doar o miscare de rotatie in jurul axei principale si o miscare de rotatie in jurul verticalei locului.
Acest efect se poate obtine si prin atasarea la partea inferioara a unor vase comunicante cu mercur, ori prin montarea la partea inferioara a giroscopului a unei bobine, care va atrage giroscopul pe directia verticalei acestuia, in jos, obtinandu-se acelasi efect.
Rezulta ca la un giroscop cu un grad de libertate limitat in orizont, axa principala tinde sa vina in permanenta pe directia Na, sub efectul inertiei si al precesiei fortate. Mai mult, sub efectul precesiei, axa xx' va reveni in pozitia initiala, depasind aceasta pozitie; in continuare, sub influenta inertiei, axa xx' revine si depaseste din nou, in sens opus, meridianul locului. Procesul se va relua, astfel ca axa principala a giroscopului va descrie continuu o elipsa in jurul directiei Na. Oscilatiile axei xx' in jurul meridianului adevarat (directiei Na) se numesc oscilatii neamortizate.
Dispozitivul de amortizare a oscilatiilor giroscopice are la baza principiul vaselor comunicante (fig.20). La partea superioara a giroscopului, in planul xOz, se monteaza doua vase comunicante A' si B', continand ulei. In pozitie de echilibru hidrostatic, nivelul de ulei se ridica la jumatatea inaltimii celor doua vase. De asemenea, tubul inferior de comunicatie a uleiului este prevazut cu robinetul (F) de reglaj a vitezei de circulatie a lichidului, functie de vascozitatea lui. La partea superioara este montat tubul de comunicatie a aerului.
Viteza de circulatie a uleiului se regleaza astfel incat perioada de trecere a uleiului dintr-un bazin in altul sa fie egala cu 1/4 din perioada oscilatiilor neamortizate. Valoarea optima a acestei perioade se determina cu precizie in laborator.
Proportia dintre cele doua perioade face ca atunci cand axa xx' se
gaseste in orizont, diferenta nivelului uleiului in cele
doua vase sa fie maxima, si invers, cand axa xx' se
gaseste la unghi maxim fata de orizont, atunci nivelul uleiului
in cele doua vase sa fie acelasi
[Fig.20] Principiul vaselor comunicante
Dezechilibrul creat astfel, este sursa unei miscari de precesie suplimentara, ce actioneaza in sensul reducerii amplitudinii oscilatiilor. Procesul este convergent, astfel ca axa xx' va executa in jurul directiei Na o spirala. Dupa 3-4 oscilatii (timp de cca. 3-4 ore), axa xx' se va stabiliza in orizont, pe directia Na (fig.22).
Un astfel de giroscop, impreuna cu instalatiile si dispozitivele aferente, ale carui oscilatii au fost amortizate, se numeste GIROCOMPAS.
3.3. GIROCOMPASUL. COMPUNERE si FUNCTIONARE
Indiferent de firma constructoare, blocurile componente ale unui girocompas sunt, de regula, aceleasi. In fig.23 este data schema bloc generala de functionare a unui girocompas.
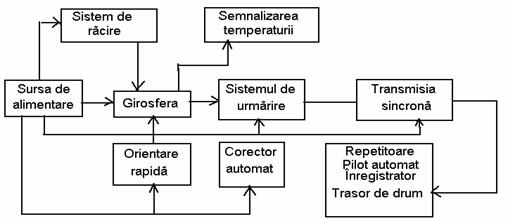
[Fig.23 ] Schema bloc generala a girocompasului
GIROSFERA este o sfera din cupru acoperita cu grafit (fig.24), alcatuita din doua calote polare (1,2) si o banda ecuatoriala (3) gradata in grade; calotele si banda ecuatoriala au rol de electrozi de alimentare cu energie electrica. De asemenea, banda ecuatoriala este prevazuta cu o zona intrerupta (4), avand un rol special in functionarea sistemului de urmarire.
In interiorul girosferei (fig.25), functie de modelul constructiv al girocompasului, se pot gasi unul, doua sau trei giroscoape; astfel, exista girocompase monogiroscopice (a caror girosfera contine un singur giroscop), bigiroscopice (doua giroscoape), si respectiv trigiroscopice (trei giroscoape). In fig.25 este reprezentat interiorul unei girosfere a unui girocompas bigiroscopic; se remarca cele doua giroscoape (1,2) si sistemul de parghii (3).
In cazul in care girosfera este monogiroscopica, axa xx' a girosferei se confunda cu axa xx' a giroscopului, astfel ca directia Na (4 in fig.25) este materializata de axa xx' a giroscopului.
In cazul girocompaselor bigiroscopice, axa xx' a girosferei este materializata de bisectoarea axelor xx' ale celor doua giroscoape; rezulta ca dupa amortizarea oscilatiilor, girosfera se va stabiliza cu axa xx' (definita anterior) pe directia Na. Girosfera este umpluta cu hidrogen, pentru a preintampina oxidarea elementelor componente. De asemenea, in afara elementelor schitate in fig.54, in interiorul girosferei se mai gasesc tancurile si racordurile sistemului de amortizare a oscilatiilor, precum si sistemul de coborare a centrului de greutate (care poate fi materializat printr-o greutate, printr-o bobina electromagnetica sau printr-un sistem de tancuri cu mercur)
Exista girocompase umede (la care girosfera pluteste intr-un lichid de suspensie, cu compozitia: 12 litri apa distilata, 2.5 litri glicerina, si 11g acid salicilic. Lichidul de suspensie are rol de sustinere in stare independenta (fara legaturi mecanice), in echilibru hidrostatic, a girosferei. In stare activa, girosfera are o usoara flotabilitate negativa, adica se afla scufundata complet in lichidul de suspensie, avand o greutate aparenta de doar 30g. De asemenea, lichidul de suspensie asigura alimentarea cu energie electrica (120V, 330Hz) a motoarelor giroscopice ce antreneaza torurile giroscoapelor din interior. Suspensia girosferei in lichid asigura o orientare rapida, fara frecari. La alte tipuri de girocompase, girosfera este 'uscata', suspensia fiind asigurata printr-un sistem cardanic, iar alimentarea cu energie prin legaturi electrice.
Torurile giroscoapelor sunt antrenate de cate un motor electric asincron de curent alternativ trifazic.
[Fig. 24] Girosfera [Fig.25
SURSA DE ALIMENTARE este reteaua bordului, iar curentul de alimentare are tensiune mica (110V) si frecventa mare (in jur de 300 Hz).
SISTEMUL DE URMARIRE este compus in principiu din:
-sfera de urmarire;
-motorul de urmarire.
Sfera de urmarire (fig.55), contine in interior girosfera, si are urmatoarele functii:
-centrarea girosferei in interiorul sau;
-urmarirea girosferei.
Functia de centrare se realizeaza cu ajutorul unor bobine dispuse astfel incat sa creeze un camp radial, care sa mentina girosfera la o anumita distanta fata de sfera de urmarire, in interiorul acesteia. Se poate discuta de functia de centrare doar la girocompasele umede, deoarece la cele uscate girosfera este montata rigid in sistemul cardanic.
Functia de urmarire a girosferei consta in determinarea unghiului de defazaj dintre axul longitudinal al navei si axa xx' a girosferei (adica directia Na) la orice schimbare de drum a navei.
Aceasta se realizeaza cu
ajutorul electrodului (3) montat in zona ecuatoriala (4) a sferei de
urmarire (fig.26). Cand nava este stabila pe drum, electrodul sferei
de urmarire se gaseste plasat in dreptul zonei intrerupte a benzii ecuatoriale a girosferei (4, fig.53). La schimbarea de drum a navei, sfera de
urmarire va gira odata cu nava (girosfera ramanand
orientata pe directia Na), astfel ca electrodul sferei de urmarire se va deplasa, creandu-se un dezechilibru electric, sesizat de o punte electrica,
ce va transforma unghiul de defazaj dintre cei doi electrozi (unghiul de
schimbare de drum) in semnal electric.
[Fig.26 ] Sfera de urmarire
Acest semnal este transmis motorului de urmarire (11) care va roti corespunzator rozele repetitoarelor, indicand noua valoare de drum al navei. Simultan, motorul de urmarire, prin intermediul axului (8) va roti sfera de urmarire cu acelasi unghi, in sens opus, astfel ca sfera de urmarire va reveni in pozitia initiala, cu electrodul in dreptul zonei intrerupte de pe banda ecuatoriala a girosferei (2), re-echilibrand puntea; in acest mod, sistemul de urmarire este gata de a sesiza noile schimbari de drum ale navei. Pe fig.26 s-au mai notat:
-girosfera (1);
-axul motorului de urmarire (5);
-bratele (6), prin care trec cablurile electrice de alimentare ale motorului de urmarire;
-roata dintata (7) pentru antrenarea rozelor indicatoare de drum (9, 10) ale sistemului de urmarire (nu sunt aceleasi cu ale repetitoarelor).
In sfarsit, aceeasi valoare unghiulara de schimbare a drumului este transmisa, sub forma de semnal electric (de intensitate proportionala cu valoarea unghiului de giratie), la SISTEMUL DE TRANSMISIE SINCRONA.
Acest sistem realizeaza rotirea simultana a rozelor dispozitivelor periferice de indicare a drumului, numite repetitoare, precum si la pilotul automat, inregistratorul de drum si la trasorul automat de drum.
La bord, repetitoarele pot fi:
repetitoare de drum ;
repetitoare de relevare ;
Repetitoarele de drum indica valoarea drumului navei in momentul citirii, la precizie de zecime de grad. Acestea sunt plasate in urmatoarele compartimente:
in timonerie, in apropierea timonei, pentru guvernarea navei;
la statia de radiolocatie, pentru determinarea relevmentelor la tinte;
la radiogoniometre, pentru determinarea relevmentelor la radiofaruri;
in cabina comandant;
in compartimentul masini;
la postul de guvernare de rezerva;
la pilotul automat.
in camera hartilor.
Repetitoarele de drum sunt montate vertical ori in pozitieoblica, pentru o citire usoara a drumului navei.
Citirea drumului se executa la linia de credinta prova, care este o lamela verticala de tabla ce materializeaza axul longitudinal prova al navei.
Repetitoarele de relevare sunt montate in cele doua pasarele ale puntii de comanda, pe un suport inalt, si servesc la masurarea relevmentelor la repere costiere sau la astri. In plus fata de repetitoarele de drum, acestea sunt prevazute cu un cerc azimutal exterior, gradat de regula in sistem semicircular, pentru masurarea relevmentelor prova.
Cele 2 repetitoare de relevare sunt montate in pozitie orizontala, deoarece relevmentele, prin definitie, sunt unghiuri in planul orizontului adevarat.
Valorile de relevment se masoara cu alidada optica, prevazuta cu sistem optic de vizare si citire a valorilor de relevment, ceea ce imbunatateste performantele alidadei simple. De asemenea, alidada optica este prevazuta cu filtre de lumina si oglinda reflectoare in vederea masurarii relevmentelor la Soare, cu o nivela cu bula (pentru verificarea orizontalitatii repetitorului in momentul relevarii), cu instalatie de iluminare pe timp de noapte, precum si cu o alidada simpla (rabatabila).
Inregistratorul de drum indica grafic, pe hartie electrochimica, valoarea de drum a navei, durata de intoarcere, precum si durata de timp cat s-a mentinut drumul respectiv. De regula, inregistratorul de drum se instaleaza in camera hartilor. Citirea hartiei inregistratorului de drum se face incepand cu banda verticala din stanga (fig.27); semnul trasat de penita indica numarul cadranului de orizont. Citirea valorii de drum se face apoi in zona centrala a hartiei. Hartia este impartitaa de linii orizontale, intre care exista o astfel de distanta, incat doua linii consecutive vor trece prin dreptul penitei la interval de 10 minute. Lungimea unui sul de hartie permite inregistrarea drumului timp de 30 zile.
[Fig.27 ] Citirea
hartiei inregistratorului de drum
Trasorul automat de drum este un dispozitiv asemanator ca principiu de functionare cu inregistratorul de drum, insa realizeaza trasarea direct pe harta a egmentelor de drum parcurse de nava.
SISTEMUL DE RACIRE asigura racirea lichidului de suspensie, care la randul sau preia energia calorica rezultata din actionarile electromagnetice (ca urmare a efectului Joule-Lenz) si mecanice ale componentelor girosferei. La girocompasele uscate, racirea se executa cu aer.
Racirea permanenta a lichidului de suspensie permite, pe de o parte, mentinerea unei temperaturi optime in interiorul girosferei, iar pe de alta parte mentinerea densitatii normale a lichidului. Astfel, cresterea/scaderea temperaturii determina scaderea/cresterea densitatii lichidului, ceea ce produce modificarea flotabilitatii girosferei, cu urmari negative in functionarea girocompasului.
Instalatia de racire este compusa din:
pompa de racire;
serpentina de racire;
tubulaturi;
termostat;
In momentul in care temperatura lichidului electrolitic de sustinere a depasit, spre exemplu, limita superioara (41 C), termostatul anclansaza si permite pornirea pompei de racire, care va actiona circulatia apei dulci (agentul de racire) in tubulaturile instalatiei, si deci prin serpentina de racire (care se gaseste in lichidul de suspensie). Dupa ce agentul termic a preluat o parte din energia calorica a lichidului de suspensie, trece printr-un tanc cu apa rece, ori traverseaza compartimentul frigorific al navei. La unele tipuri de girocompase umede, sistemul de racire este prevazut si cu dispozitiv de racire cu aer.
SISTEMUL DE ORIENTARE RAPIDA A GIROSFEREI permite orientarea girosferei cu axa xx' pe directia Na a locului in timp scurt, aproximativ 30-60 minute de la pornire; in mod normal, orientarea girosferei se face in 3-4 ore. Aceasta operatiune se realizeaza prin injectarea de impulsuri de curent asupra girosferei, avand ca efect orientarea 'fortata' a acesteia.
Trebuie mentionat ca, exceptand repetitoarele si alte cateva componente, toate dispozitivele si sistemele enumerate se gasesc montate compact in aparatul central, care se mai numestre si instalatia girocompasului mama, si care se gaseste instalat la bordul navei intr-un compartiment separat (numit compartiment giro), dispus la una din puntile inferioare, cat mai aproape de metacentru, pe considerentul reducerii valorilor unghiurilor de banda.
3.4. ERORILE GIROCOMPASULUI
Pentru un girocompas instalat la uscat, dupa amortizarea oscilatiilor, axa xx' a girosferei se va orienta pe directia meridianului adevarat (Na). La girocompasul instalat la bordul navei insa, ca urmare a erorilor rezultate din schimbarile de drum si viteza, ruliului si tangajului, etc., axa xx' a girosferei nu se va orienta pe directia Na, ci pe o directie apropiata de aceasta, numita directia nord giro (Ng). Principalele erori ce afecteaza precizia indicatiilor girocom-pasului instalat la bordul navei, sunt:
deviatia giro (δg);
eroarea de instalare (A);
eroarea cauzata de variatia vitezei si a drumului navei;
eroarea de balans;
erori accidentale;
DEVIATIA GIRO (δg) sau EROAREA DE VITEZA este unghiul din planul orizontului adevarat cu care este deviata axa xx' a girosferei fata de directia Na, datorita deplasarii navei pe sfera terestra intr-un drum dat, cu o viteza data.
Fie o nava (fig.28a) care se deplaseaza intr-un drum oarecare pe sfera terestra; datorita deplasarii, partea din prova a orizontului adevarat va cobori, in timp ce partea dinspre pupa se va ridica. Ca urmare, planul orizontului va executa o miscare de rotatie in jurul axei transversale a navei. Vectorul viteza unghiulara de rotatie a orizontului in jurul axei transversale a navei se noteaza cu w si este un vector cu originea in centrul de greutate al sistemului giroscopic, suportul in axul transversal al navei si sensul dat de regula burghiului drept aplicat rotatiei orizontului in jurul axului transversal al navei. Ca urmare acest vector va fi orientat intotdeauna catre babord. In acelasi timp, axa xx' a girosferei tinde sa se orienteze pe directia Na (vectorul w reprezinta vectorul viteza unghiulara de rotatie a torului giroscopic). Ca urmare, axa xx' a girosferei se va orienta pe directia rezultantei vectorilor w si w
Aceasta directie rezultanta
este directia Nord giro (Ng).
[Fig.28a ] Deviatia giro [Fig.28b]
Pentru determinarea expresiei deviatiei giro, se considera (in fig.28b) vectorul V reprezentand viteza de deplasare a navei, cu componentele sale :
V1 = Vcos D;
V2 = Vsin D .
unde D este Drumul adevarat sau giro al navei
Se defineste de asemenea vectorul F ca fiind viteza tangentiala a punctului in care se gaseste nava (de latitudine geografica j ) antrenat de rotatia sferei terestre in jurul axei polare. Acest vector are suportul pe paralelul punctului navei, sensul catre est si modulul dat de relatia:
De asemenea, se aproximeaza V2 ca fiind neglijabil in comparatie cu viteza tangentiala periferica a sferei terestre F; ca urmare, nava se va deplasa in orizontul adevarat pe directia rezultanta a vectorilor V1 si F. Unghiul format de suportul vectorilor F si G se numeste deviatie giro sau eroare de viteza.
Se exprima unghiul δg in triunghiul dreptunghic OFG:
tg(δg) = VcosD/ wT Rcos j
Dar viteza liniara periferica a sferei terestre este :
wTR = 360/24h = 15 [/h] = 1560 ['/h] = 900 ['/h].
Aproximand pentru valori mici ale lui δg ca: tg δg ~ dg, rezulta ca deviatia giro are forma:
dg = VcosD/900cos j
unde : V = viteza navei in [Nd];
D = drumul (adevarat sau giro);
j = latitudinea la care se naviga.
Pentru calcule expeditive, s-a intocmit tabla 17b/ DH-90, care are ca argumente de intrare V,D si j
OBSERVATIE : tabla 17b este intocmita pe baza relatiei de mai sus careia i s-a atribuit semnul algebric -, deoarece relatia exprima eroarea de viteza, in timp ce tabla 17b furnizeaza valori ale corectiei pentru deviatia giro (corectia, prin definitie, reprezinta eroare cu semn schimbat). Deci corectia pentru deviatia giro va avea forma:
dg = -dg =-(VcosD/900cosj
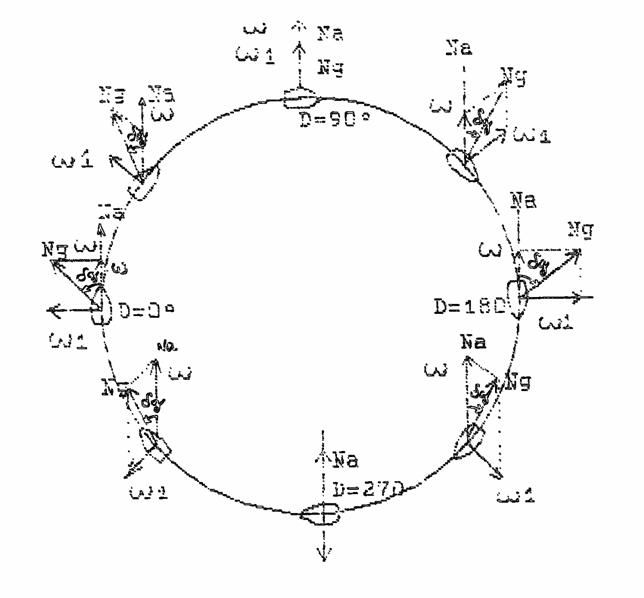
Ca urmare, s-a convenit ca simbolul "dg" sa desemneze corectia pentru deviatia giro, notiune cu care se va opera mai departe pentru a semnifica unghiul din planul orizontului adevarat masurat de la directia Na pana la directia Ng. Variatia deviatiei giro (erorii de viteza) functie de valoarea de drum, se poate determina din relatia de mai sus sau se poate urmari pe fig. 29. Concluziile in urma analizei acestei dependente, sunt:
dg este pozitiva pentru drumuri in cadranele II si III de orizont, si negativa pentru drumuri in cadranele I si IV de orizont.
dg este maxima pentru D=180 si minima pentru D=000;
dg este nula pentru drumurile de 090 si 270.
La unele tipuri de girocompase, sunt prevazute dispozitive pentru corectarea automata a erorii de viteza, numite corector automat al erorii de viteza, sau corector automat giro. Acest dispozitiv introduce automat valoarea corectiei pentru eroarea de viteza in valorile de drum indicate de girocompas.
EROAREA DE INSTALARE (numita si eroare de colimatie) este unghiul cu care linia de credinta a girocompasului mama este deviata fata de planul diametral (axul longitudinal) al navei. Aceasta eroare are o valoare fixa indiferent de parametrii de miscare ai navei (Drum, Viteza) ori de latitudinea la care se naviga.
In calculele de navigatie se utilizeaza corectia pentru eroarea de instalare care se noteaza cu "A", si care este egala in modul, dar de sens contrar, cu eroarea de instalare. Se exprima in grade si zecimi de grad.
Celelalte erori enumerate au valori mici, si exista o probabilitate mare ca ele sa se anuleze (aproape in intregime) reciproc.
[Fig.29 ] Variatia
deviatiei giro functie de drum
3.5. CORECTIA TOTALA GIRO. CONVERTIRI GIRO.
Se defineste corectia totala giro ca fiind suma algebrica a corectiei pentru deviatia giro si a corectiei de instalare, deci ca fiind unghiul din planul orizontului adevarat al observatorului masurat de la directia nord adevarat pana la directia nord giro.
Corectia totala giro se noteaza cu dg sau cu CTG, ia valori semicirculare de la 000 la 180 catre est (si va primi semnul algebric +) atunci cand directia nord giro (Ng) se gaseste la est fata de directia nord adevarat (Na), sau de la 000 la 180 (si va primi semnul algebric -) atunci cand directia nord giro se gaseste la vest de directia nord adevarat. Corectia totala giro se exprima la precizie de 0.1 , utilizand semnul algebric; de asemenea, relatia de calcul, conform definitiei, este:
CTG = dg + A .
S-a precizat anterior, ca la unele tipuri de girocompase, corectorul automat giro introduce automat corectia pentru deviatia giro in indicatii, si ca urmare elimina dg din relatia (25); aceasta devine:
CTG = A .
Rezulta ca la aceste compase giroscopice , CTG are o valoare constanta, egala cu A. Cu toate acestea, in cadrul probelor de mare sau ori de cate ori se impune, se executa determinarea corectiei totale giro prin procedee costiere sau astronomice. De asemenea, asa cum s-a mai precizat, in regulamentul serviciului la bord s-a prevazut obligativitatea ofiterului de cart din schimbul 04.00-08.00 (16.00-20.00) sa execute controlul CTC si/sau CTG cu Soarele la rasarit (apus).
In mod curent, la bord, se impune convertirea valorilor de drum sau de relevment citite la repetitorul giro in valori adevarate (Da,Ra), in vederea trasarii pe harta. Invers, se impune ca valoarea de drum scoasa din harta sa fie convertita in valoare de drum giro, care apoi se comanda timonierului.
Se intelege prin drum giro (Dg), unghiul din planul orizontului adevarat al observatorului, masurat de la directia nord giro pana la directia catre prova a axului longitudinal al navei; se exprima de regula circular, masurandu-se in sens retrograd, si deci ia valori de la 000 la 360 (fig.59).
Precizia la care se exprima drumul giro este de 0.1 .
In mod analog, se defineste relevmentul giro (Rg), ca fiind unghiul din planul orizontului adevarat masurat de la directia nord giro pana la directia de vizare la reper. Relevmentele giro se exprima circular, la precizie de 0.1 .
Relatiile de convertiri giro sunt urmatoarele (fig.59):
Da = Dg + CTG ; Dg = Da - CTG .
Ra = Rg + CTG ; Rg = Ra - CTG .
Pe timpul navigatiei, principala atributiune a ofiterului de cart este executarea veghei vizuale si radiotehnice; paralel cu aceasta activitate, el este obligat ca periodic sa controleze daca timonierul guverneaza nava pe drumul compas/giro ordonat. In plus, trebuie retinut ca ofiterul de cart pe puntea navei este obligat sa confrunte permanent valoarea drumului navei indicata de compasul magnetic si de girocompas. Diferentele mari intre cele doua valori constituie indiciul ca exista dereglari in functionarea girocompasului.
[ fig.59 ] Convertiri giro.
In aceasta situatie, guvernarea navei se asigura dupa compasul magnetic, pana la remedierea defectiunilor.
Ca urmare, trebuie retinut ca, desi mai precis decat compasul magnetic, girocompasul, prin complexitatea sistemelor ce il compun, este expus defectarilor cu o probabilitate mare; compasul magnetic ramane un instrument sigur, de baza, pentru asigurarea guvernarii navei.
Toate aceste consideratii conduc la concluzia ca in conditii normale pe timpul navigatiei guvernarea se face dupa compasul giro, comparand permanent indicatiile acestuia cu cele ale compasului magnetic.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 13754
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved