| CATEGORII DOCUMENTE |
| Arhitectura | Auto | Casa gradina | Constructii | Instalatii | Pomicultura | Silvicultura |
CASA INTELIGENTA MONITORIZATA CU AP TSX 07
CUPRINS
CAPITOLUL 1 - Consideratii generale
1.1 Introducere in reteaua de casa 4
1.2 Care sunt avantajele oferite? 5
1.3 Proiectarea unui sistem de automatizare a intregii case 5
CAPITOLUL 2 - Senzori utilizati in sistemele domestice
Elemente de senzoristica 11
2.2 Senzori de prezenta 15
2.3 Senzori de gaz 16
2.4 Senzori de umiditate 18
2.4.1 Umidimetre resistive 19
2.4.2 Metode de masurare a umiditatii
2.5 Senzori de lumina 21
2.6 Senzori de fum 22
CAPITOLUL 3 - Consideratii generale
3.1 Tipuri de sisteme pentru casa inteligenta 24
3.1.1 Sisteme bazate pe PC
3.1.2 Sisteme hibride
3.1.3 Softaware folosit pentru a interfata cu aceste sisteme
de sine statatoare
3.1.4 Sisteme autonome
3.2 Caracteristici ale sistemelor pentru casa inteligenta 27
3.2.1 Factorul functionalitate oferita 27
3.2.2 Factorul fiabilitate 28
3.2.3 Factorul consumul de energie 31
3.2.4 Factorul dimensiuni - spatiu ocupat 32
3.2.5 Factorul zgomot 32
3.2.6 Concluzii 33
3.3 Niveluri ale automatizarii casei 33
CAPITOLUL 4 - Prezentarea generala a automatelor programabile
4. 1 Generalitati 36
4.1.1 Dezvoltarea in timp a automatelor programabile 36
4.2 Teoria operatiei 37
4.3 Numaratoare 39
4.4 Temporizatoare 41
4.5 Operatiile automatelor programabile 44
4.6 Automate programabile TSX 07 48
4.6.1 Prezentare automate programabile 48
4.6.2 Descrierea automatelor programabile 48
CAPITOLUL 5 - Prezentarea limbajului de programare PL7 - NANO
5.1 Generalitati 51
5.2 Construirea unui program in limbaj de contacte 57
5.2.1 Construirea unei retele de contacte 58
ANEXE
CAPITOLUL 1
CONSIDERATII GENERALE
Introducere in reteaua de casa
Cele mai multe subsisteme si aparate din jurul casei pot fi conectate si automatizate intr-o retea de casa. In curand , chiar si aparatele casnice vor comunica intr-o retea casnica , previzionandu-se ca in viitorul apropiat, aparatele casnice si dispozitivele vor fi construite inteligent , astfel incat vor trimite informatii despre stare pe reteaua de acasa. S-a scris mult despre automatizarea intregii case, totusi a existat o evolutie in aceasta industrie si piata se extinde rapid .
Prima parte a acestei lucrari va aduce informatii despre schimbarile din industria automatizarii casei si despre ariile de suprapunere cu alte tehnologii.
Automatizarea casei a evoluat cu tehnologia datorita faptului ca noi standarde de comunicatie interoperabile si instalatii electrice sunt implementate, automatizarea casei implicand managementul aparatelor casnice inteligente, a dispozitivelor si a sistemelor intr-o retea de casa.
O retea de casa a evoluat de la comunicarea si conectarea intre computere la comunicarea si conectarea intre toate aparatele casnice, dispozitivele si sistemele dintr-o casa. Aceasta extensie a termenului de retea de casa este posibila deoarece informatii de control si stare pot fi trimise prin reteaua de tensiune, cabluri diverse (incluzand audio / video sau IR) si chiar prin mijloace wireless, aceasta insemnand faptul ca infrastructura de comunicatie din casa este inclusa in conceptul de retea de casa. Chiar si puterea livrata casei si distribuita tuturor componentelor va da informatii care vor fi utilizate pentru managementul energiei. Multe tipuri de ofertanti de servicii vor putea folosi reteaua de casa pentru a oferi produsele lor printr-un Gateway . Un Gateway poate fi definit ca un punct de comunicatie a serviciilor din afara cu dispozitivele, aparatele casnice si sistemele din reteaua de casa . Aceasta este motivul pentru care un sistem de automatizare a intregii case ar folosi reteaua de casa care este instalata ca infrastructura pentru automatizarea casei.
1.2 Care sunt avantajele oferite?
Simplitate, acces, control personalizat asupra mediului, servicii active, comunicatii, securitate. Deoarece nevoile, influentele sociale, standardele industriale si economice joaca un rol important in stabilirea unei piete, studierea acestor factori va ajuta la intelegerea avantajelor implementarii unui sistem automatizat in casa. O casa construita cu standardele vechi de cablare devine incompleta de cand dispozitivele pe care casa le contine sunt inteligente si serviciile nu pot fi obtinute cu aceste standarde vechi. Stilurile de viata ale oamenilor sunt diverse si diferite fata de cele ale generatiei anterioare, astfel ca nevoile oamenilor devin dinamice. Societatea a devenit mai complexa, rezultand utilizarea unor unelte mai sofisticate, care pot fi folosite in moduri simple.
Avantajele implementarii unui sistem automatizat in casa pot fi vazute practic in ceea ce sistemul va face pentru un proprietar de casa oarecare. Dispozitivele pot fi instalate usor, cu efort minimal, servicii de la ofertanti diferiti putandu-se adauga fara instalare aditionala sau configurare dificila, accesul la informatie fiind instantaneu si mereu prezent.
Aceste lucruri pot fi obtinute cand un sistem automatizat al intregii case este implementat corect. In continuare voi trata aspectele tehnologice care trebuie luate in consideratie la instalarea unui sistem automatizat al intregii case, care sa atinga aceste scopuri, atitudinile si aspectele economice devenind dominante odata ce standardele in automatizarea casei vor deveni stabile si odata ce convergenta ofertantilor va avea loc. Tranzitia la o noua era a "casei automatizate" va deveni o situatie comuna si dinamica a stilurilor de viata, iar avansurile tehnologice si factorii sociali vor fi absorbiti.
1.3 Proiectarea unui sistem de automatizare a intregii case
Deoarece sunt mai multe feluri de a finaliza acelasi lucru si diferite sisteme de automatizare au plusuri si minusuri, se vor alege sistemele care tin seama de nevoile clientului, au tehnologii compatibile bazate pe standarde si sunt cel mai simplu de instalat, cu optiuni de aducere la zi. Pentru a accelera vanzarea sistemelor se vor proiecta pachete de baza care sunt specifice aplicatiilor. Aceasta va simplifica vanzarea catre un client sau constructor si vor scadea timpul de proiectare.
Deoarece stilurile de viata difera, nu exista o solutie simpla pentru a rezolva probleme individuale; totusi, exista tehnologii capabile de managementul fiecarei solutii, concomitent cu oferta de utilitati care imbunatatesc stilul de viata. Aceste tehnologii pot fi combinate in sisteme capabile sa indeplineasca multe sarcini casnice si care sa permita proprietarului sa controleze mediul. Deoarece organizarea este cheia succesului in managementul diferitelor medii, tehnologiile trebuie sa fie capabile sa asiste individul sau familia sa indeplineasca urmatoarele actiuni ;
. Accesul si stocarea de informatii;
. Managementul situatiei economice a familiei;
. Managementul nevoilor de comunicare ale familiei;
. Protejarea si securitatea mediului;
. Operatii simple;
. Operatii fara service;
. Personalizarea stilurilor de viata ale familiei;
Sunt mai multe feluri de a accesa sisteme de automatizare a casei dar acestea sunt dependente de capabilitatile de retea de casa. Serviciile casei si nevoile clientilor trebuie analizate inaintea alegerii sistemelor de automatizare si a accesului la aceste sisteme. In figura precedenta, conceptul de ciclu de faze de productie, serviciile (telecomunicatii, cablu, satelit, Internet, alimentarea cu curent) si nevoile clientilor (automatizarea casei, facilitati multimedia, securitate, Internet, tipuri de acces la sistem) vor determina tipul de sisteme de automatizare ce vor fi instalate si integrate. Deci, tipul de acces trebuie sa fie suportat de sistemul de automatizare al casei, in caz contrar vor trebui cumparate componente aditionale. Cele mai comune tipuri de acces sunt:
. Televiziunile;
. PC/Laptop;
. Browser - e de Internet;
. Telefoane /celulare
. Butoane cu transmitere;
. Telecomenzi;
. Activare vocala;
Ecrane cu atingere;
Accesul la functiile sistemului trebuie sa fie controlate prin parole, recunoasterea biometrica, acces cu card, setari de privilegii - unde vor fi necesare autorizari. Sistemele de control al accesului pot retine ora si data intrarii utilizatorilor.
A cabla sau nu ?
Noile case trebuie cablate cu sistem de cabluri care sa respecte standardele CEBus sau cand proiectul de remodelare face acest deziderat fezabil economic si fizic. Casele existente trebuie instalate cu un model fara fire (ex. Intellon, HomePNA) sau mijloace de reamenajare fara fir.
Design-ul sistemului video al casei
Se foloseste cablu coaxial RG6 de calitate sau RF fara fir pentru distribuirea semnalului prin casa. Este o idee buna sa se instaleze doua mufe RG6 intr-o camera unde se doreste video input si video output. Daca se foloseste linia de cablu TV, ar trebui sa existe un semnal de cel putin 15db in casa, propagarea si pierderea de semnal fiind importanta. Pentru fiecare 30 m de RG6 se pierd 6 db. Se numara intrarile (camere, DVD, video, satelit) si iesirile (televizoare) si se folosesc amplificatoare video care pot mari semnalul. In tabelul urmator se prezinta pierderile ca rezultat al splitter - elor / combinatoarelor:
SPLITTER/COMBINATOR PIERDERE (-dBmV)
1x2 3,5
1x4 8,0
lx8 12,0
Design-ul sistemului audio al casei
Sunt multe sisteme audio disponibile astazi, de la slabe calitative la inalt calitative. Sunt doua tipuri de sisteme : combina sau strict audio. Daca se foloseste un control de volum pentru fiecare difuzor, se mentine impedanta care se potriveste pentru amplificator, lasandu-se cel putin 60 cm de cablurile de alimentare.
Cablurile de telefon
Este indicata folosirea de cablu CAT 3 (mai bine CAT 5) pentru telefoane. Se acorda atentie ca unghiurile de rasucire sa nu depaseasca 90 de grade pentru a nu atenua semnalul si se va desena o schema pentru a identifica locatiile cablurilor de telefon.
CAT 3 = 16 MHz ( 10 Mbs)
CAT 4 = 2O MHz ( 16 Mbs)
CAT 5 = 100 MHz (100 Mbs)
Cablarea retelei LAN/WAN
LAN este retea locala de conectare a PC-urilor din casa. Sunt mai multe tehnologii disponibile: pe linie de telefon (lMbs), USB (lMbs), RF fara fir (2 Mbs), Ethernet CAT 3 ( 10 Mbs) sau Ethernet CAT 5 (10 sau 100 Mbs).
WAN este retea pe arie mare de conectare a PC-urilor la o retea exterioara. XDSL si ISDN sunt exemple de WAN. Cele mai multe sisteme de distributie video sunt capabile de distributia acestei conexiuni.
Zona HVAC
Separarea pe zone a sistemului HVAC poate minimiza consumul de energie si poate face casa mai confortabila. Unitatile HVAC multiple, fiecare servind o zona diferita sau un palier diferit nu sunt separate pe zone, sunt sisteme complet independente. Separarea pe zone se face daca se folosesc vane de aer pentru directionarea caldurii si aerisirea de la un singur sistem HVAC la mai mult de o zona. Un sistem cu doua zone va avea, in general, doua vane, fiecare controland curentul de aer la o zona. Sistemul de control al zonei va controla vanele si sistemul HVAC pentru a incalzi si raci fiecare zona. Un controler de zona conecteaza termostate multiple la un singur sistem HVAC. Termostatul localizat in fiecare zona si vana ce controleaza aerul catre fiecare zona sunt conectate la controlerul de zona. Vanele deschid si inchid conducta de aer ce trece pe la fiecare zona. Se folosesc, de obicei, vane normal deschise, cu doua pozitii, cu arc, motorizate. Controlerul de zona trimite semnale de control pentru a porni sistemul HVAC.
Sunt trei variabile folosite pentru selectia controlerului de zona corect.
Numarul de zone;
Daca sistemul HVAC are pompe termice;
Daca instalarea se face ascendent sau nu;
Uzual, separarea pe zone se face pentru a separa sisteme HVAC de la primul nivel de cele de Ia parter. Un egalizator termic poate fi folosit pentru a controla mai bine nivelele.
Automatizare cu PC - ul
PC-ul folosit ca un controller central al casei ofera avantajul schimbarii tehnologiei. Este mai usor sa se faca un upgrade la PC (interfete si software) pentru a beneficia de noi tehnologii decat sa se schimbe sistemele de automatizare.
PC - ul a devenit cel mal flexibil dispozitiv de acces: PC mobil pentru masina, PC portabil (laptop) pentru cei care calatoresc, PC desktop pentru acasa, Pocket PC pentru notite. Toate aceste PC-uri pot fi conectate folosind mijloace cu cabluri sau fara. Aceasta permite fiecarui PC sa se comporte ca un dispozitiv de acces la sistemul de automatizare al intregii case.
Intregul sistem poate fi monitorizat si controlat prin acces de la aceste tipuri de PC. In plus, fiecare tip de PC poate primi informatii de la controlerul de automatizare al intregii case pentru a anunta proprietarul de un eveniment al sistemului.
Un computer central poate primi semnale de la proprietar sau de alt dispozitiv, apoi trimite aceste semnale aparatelor casnice sau sistemelor ce trebuie controlate. Computerul central initiaza sau ruteaza semnalele de comunicatie prin casa. Ca utilizator, se poate sa se interfateze cu sistemul prin tastaturi, ecrane cu atingere, butoane, ecrane TV, computere, telefoane, telecomenzi sau alte dispozitive.
Comunicarea cu PC-uri si intre dispozitive
PC - ul are 6 porturi pentru a trimite si primi informatie:
. RS232 - Bidirectional pentru comunicare dispozitiv - dispozitiv - AMP,ONQ, HAI Omni, Apex, Termostate HAI, Termostate RCS, Cutler APC si altele. Acest port foloseste protocolul ASCII ;
. USB - Bus Serial Universal capabil de a interfata cu 127 de periferice la 1 Mbs;
. IEEE - 1395- Un bus digital de mare viteza, capabil de 100, 200 sau 400 Mbs cu echipament digital A/V. Acest port foloseste protocolul HAVI;
. Irda - Transfer de date in infrarosu punct la punct;
. Card Ethernet - O placa de retea Ethernet este legata la busul PCI al PC - ului, bidirectionala, cu viteze de 10 Mb si 100 Mb;
. Portul paralel - Un port bidirectional al PC-ului care trimite si primeste date asincron.
Controlerul de automatizare client
Sistemul de automatizare al intregii case nu ar trebui sa aiba un singur punct comun de defectare. Sistemele redundante minimizeaza riscul daca sistemul de control ar ,,cadea". Sunt mai multe dispozitive care pot fi controlere de automatizare a casei: PC-ul, controlere. Sistemul de automatizare al intregii case ar trebui sa anunte pe cineva de o situatie critica.
In prezent o arhitectura client - server ar suporta cel mai bine un sistem de automatizare al intregii case cu functii complete. Controlerele separate pot fi accesate de PC si controlate, iar daca PC - ul cedeaza, controlerele separate vor functiona. Daca controlerul separat cedeaza, PC-ul poate alerta pe cineva si / sau prelua functiile acelui controler. Tehnologia client - server poate oferi redundanta pentru functii critice ale serverului, permitand serverului sa functioneze. Tehnologia client - server permite accesul la Internet, notificare la e-mail, notificare la mail vocal si aplicatii software prin centralizarea intr-un calculator pentru managementul cel mal bun al evenimentelor sistemului.
Instalarea infrastructurii
Inainte ca peretii sa se construiasca trebuie instalata infrastrucura. Infrastrucura consista din cablare si toate componentele necesare pentru ca sistemul de automatizare al intregii case sa functioneze. Infrastructura trebuie instalata pentru ca aducerile la zi ale sistemului sa fie mai usor de implementat. Cea mai viabila infrastructura pentru noi constructii este cablarea structurata. Aceasta trebuie sa ia in considerare protocoalele de cablare si cablarea trebuie facuta la constructia casei. Noile servicii pot fi instalate oricand, deoarece cablarea este facuta.
Tehnici corecte de cablare pentru cablarea structurata
O cablare corecta permite ca alte servicii sa fie adaugate mai tarziu cu efort minim. Combinatii de RG-6, RG-11, RG-59, cabluri de tensiune joasa, de securitate, cablu coaxial de 2.2 GHz, cablu de categorie 5, trebuie organizate structurat prin casa pentru a fi de folos pentru tehnologiile prezente si viitoare. Cablarea trebuie sa se faca strategic, astfel incat integritatea sa nu aiba de suferit anii urmatori.
Odata ce infrastructura este instalata corect, sistemele de automatizare a casei vor putea folosi sistemul cu posibilitatea de a incorpora schimbari in protocoalele de dispozitive din viitor. Aceasta permite ca proprietarul sa aleaga ce tehnologie va vrea sa adauge casei si sa nu fie limitat la una singura.
CAPITOLUL 2
SENZORI UTILIZATI IN SISTEMELE DOMESTICE
2.1 Elemente de senzoristica
Masurarea unei marimi presupune in primul rand detectarea sa.
Elementele sensibile care detecteaza
marimea de masurat sunt denumite senzori. Senzorul este elementul
sensibil cu rolul de a sesiza marimea de masurat aplicata la intrarea sa, x(t)
si de a converti intr-o alta marime fizica, de aceeasi natura sau de natura
diferita,y![]() (t),
care poate fi usor masurata, cel mai frecvent pe cale electrica.
(t),
care poate fi usor masurata, cel mai frecvent pe cale electrica.
Conversia. marimii de intrare in marime de iesire la senzori se bazeaza pe efecte fizice sau chimice.
Senzorii care servesc numai la detectarea prezentei unei marimi constituie o categorie aparte si se numesc detectori (detectori de proximitate, detectori de radiatii ionizante etc.).
Ansamblul format din elementul sensibil (senzorul) si elementele de adaptare si prelucrare (conditionarea semnalelor) se numeste traductor (figura 1). In unele lucrari de specialitate nu se face o distinctie clara intre senzor si traductor.

Figura 2.1: Schema functionala a unui traductor.
Traductorul poate avea in structura sa mai multi senzori, capabili sa efectueze conversia marimii de masurat intr-o marime electrica, indirect, prin mai multe etape intermediare, pana la obtinerea marimii de iesire finale y(t).
Ansamblul format dintr-un senzor integrat in acelasi circuit (chip) cu elementul de adaptare poarta numele de traductor 'integrat'. Recent a aparut conceptul de senzor sau traductor "inteligent' care prezinta asocierea unui traductor cu un microprocesor (microcontroler). Astfel se pot obtine semnale de iesire cu mare imunitate la perturbatii, liniarizarea caracteristicii de conversie a marimii de intrare x(t) in marime de iesire y(t), autocalibrare, corectii fata de diversi factori de influenta, generarea unor marimi de control. Traductoarele inteligente s-au dezvoltat rapid ca elemente componente principale ale sistemelor automate, de masura, monitorizare si control, precum si in domeniul domoticii.
Varietatea senzorilor este foarte mare deoarece, pe de o parte, asa cum le va vedea mai jos, exista un numar considerabil de marimi de masurat, iar pe de alta parte, pentru fiecare marime de masurat pot exista diferite metode de masura, in functie de fenomenul care sta la baza conversiei. Din multitudinea de senzori se remarca amploarea considerabila a utilizarii senzori lor electrici. Luand in considerare principiul de lucru si respectiv tipul de energie care se transforma in energie electrica, avem urmatoarele tipuri de senzori:
1. Senzori de radiatie: transforma energia radianta in energie electrica, respectiv semnalul radiant in semnal electric. Ca semnale radiante avem: intensitatea luminoasa, lungimea de unda, polarizarea, faza, reflectanta, transmitanta, activitatea radioactiva.
2. Senzori mecanici: transforma energia mecanica in energie electrica, respectiv semnalul mecanic in semnal electric. Ca semnale mecanice putem avea: forta, presiune, torsiune, nivel de vid, viteza de curgere, debit, volum, grosime, nivel, pozitie, deplasare, viteza, acceleratie, rotatie, lungime de unda acustica, amplitudine de vibratie.
3. Senzori termici: transforma energia termica in energie electrica, respectiv semnalul termic in cel electric. Ca semnale termice putem avea: temperatura, caldura, entropia. caldura specifica, entropia, fluxul de caldura.
4. Senzori magnetici: transforma energia magnetica in energie electrica respectiv semnalul magnetic in semnal electric. Ca semnale magnetice putem avea: intensitatea campului magnetic, inductia campului magnetic, permeabilitatea magnetica, magnetizarea.
5. Senzori chimici: transforma semnalul (energia) chimica in semnal (energie) electric. Ca exemple de semnal chimic putem avea: compozitia. concentratia. viteza de reactie, toxicitatea. potentialul de oxidare-reducere.
Conversia de energic si respectiv semnal prezentata mai sus se poate rezuma in schema de mai jos:
Fig. 2.2: Tranformarile semnalelor neelectrice in semnale electrice
Din figura 2.2 se remarca faptul ca un semnal neelectric poate fi convertit direct in semnal electric sau poate suferi mai multe conversii de tip neelectric inainte de a fi transformat in semnal electric. Ca un exemplu de conversii multiple se prezinta mai sus cu linie punctata transformarea semnalului mecanic in semnal termic care apoi este transformat in semnal electric. Pe acest principiu functioneaza anemometrul cu fir de platina folosit la masurarea debitului de fluide (gaz, lichide), care este un semnal de tip mecanic (cm³/min. , kg/min). In curgerea sa fluidul intalneste un fir incalzit (rezistenta electrica de platina). Datorita fluidului firul se raceste si atunci isi scade rezistenta electrica. Aceasta variatie de rezistenta este apoi sesizata ca o variatie de tensiune (la alimentarea in curent constant) sau curent (la alimentarea rezistentei in tensiune constant). Deci semnalul mecanic (debit) a produs mai intai o modificare de temperatura (semnal termic) si aceasta din nou a produs o modificare de tensiune sau curent (in functie de modul de alimentare al anemometrului), deci a fost convertita in semnal electric.
Trebuie sa mentionam ca o anumita marime neelectrica poate fi detectata cu ajutorul mai multor tipuri de senzori. De exemplu deplasarea poate fi convertita in variatie de rezistenta, de inductanta, de capacitate electrica etc.
Toti senzorii de mai sus se numesc senzori electrici, datorita conversiei semnalului neelectric in semnal electric. Noi ne vom ocupa cu studiul senzorilor electrici datorita avantajelor semnalelor electrice:
1. Semnalele electrice sunt foarte sensibile la variatia semnalului ne-electric corespunzator (cel care le-a generat prin efectul de senzor).
2. Masurarea semnalelor electrice provenite de la sursa necesita puteri electrice mici datorita curentilor mici de utilizare (impedante de intrare foarte mari) in amplificatoarele operationale ale instrumentelor folosite.
3. Semnalele electrice (aferente unor fenomene fizice care variaza foarte rapid in timp) care se modifica foarte repede in timp pot fi usor masurate cu circuitele electronice care pot efectua mii de masuratori pe secunda.
4. Semnalele electrice primite de la senzori pot fi transmise cu mare viteza la mare departare (telemetrie) unde pot fi procesate ori stocate de calculatoare.
5. Semnalele electrice primite de la senzori sunt procesate in circuite integrate de o complexitate din ce in ce mai mare (sisteme integrate) realizate monolitic care au siguranta in functionare inegalabila de catre circuitele traditionale cu conexiuni prin fire.
6. Semnalele electrice ofera o mare varietate de metode de masura. De exemplu o tensiune electrica poate fi masurata prin intermediul unei frecvente.
Din punct de vedere al energiei, indispensabila desfasurarii procesului de masurare, senzorii se pot clasifica in:
Senzori activi (generatori);
Senzori pasivi (parametrici);
Senzorii activi efectueaza transformarea
directa a energiei marimii de masurat, intr-o energie asociata marimii de iesire, de regula o marime electrica.
Pentru a nu se perturba marimea de masurat si a nu afecta exactitatea
masurarii, este necesar ca energia necesari formarii semnalului de iesire y![]() (t)
preluata chiar de la fenomenul studiat, sa fie suficient de mica.
(t)
preluata chiar de la fenomenul studiat, sa fie suficient de mica.
Senzorii activi furnizeaza un semnal electric, de obicei o tensiune electrica. In consecinta, acesti senzori sunt intalniti in literatura de specialitate si sub denumirea de senzori generatori sau senzori energetici.
Exemple de senzori generatori sau energetici sunt: senzori termoelectrici, senzori de inductie la care marimea de intrare este transformata direct intr-o tensiune electrica.
Marele avantaj pe care il prezinta acesti senzori, consta in posibilitatea de masurare directa a marimii de iesire cu un mijloc electric,de masurare.
Senzorii pasivi (parametrici) sunt destinati masurarii unor marimi, care nu permit eliberarea energiei de masurare. Senzorii pasivi prezinta, ca marime de iesire, o impedanta electrica sau componente ale acesteia:rezistenta, capacitate, inductanta.
Senzorii pasivi se mai numesc si senzori parametrici sau modulatori. Pentru formarea semnalului de iesire, in cazul senzorilor parametrici, este necesara folosirea unei surse auxiliare de energie. Ansamblul senzor pasiv - sursa de alimentare creeaza semnalul electric, ai carui parametri (amplitudine, frecventa) sunt dependenti de caracteristicile marimii de masurat. Exemple de senzori parametrici sunt: termorezistentele, fotorezistentele, traductorii capacitivi si inductivi de deplasare etc .
Alte criterii de clasificare ale senzorilor si traductoarelor se fac in functie de:
natura marimii de intrare;
natura marimii de iesire (in tensiune, curent, frecventa etc.);
modul de variatie al marimii de iesire (senzori analogici, digitali).
2.2 Senzori de prezenta
Pentru detectarea prezentei umane intr-o incapere, solutia cel mai des adoptata in aplicatii este utilizarea senzorilor pasivi in infrarosu (PIR).
Un detector PIR plasat strategic in interiorul ariei protejate, este un "ochi" in infrarosu, sesizand orice miscare in zona pe care o acopera.
Denumirea PIR provine de la infrarosu pasiv(Passive Infrared), cunoscut de asemenea ca infrarosu termic. Aceasta reprezinta radiatia naturala emisa de obiectele calde, de exemplu radiatia termica produsa de foc. Dar de asemenea, extremitatile obiectelor obisnuite, cu temperaturi normale, aflate in miscare in jurul nostru emit mai multa radiatie in infrarosu pasiv decat fundalul pe care se afla.
Oamenii, fiintele vii in general si masinile cu motoare calde emit radiatie pe care detectoarele PIR o pot sesiza oricand. Radiatia in infrarosu pasiv nu trebuie confundata cu cea in infrarosu apropiat emisa de telecomenzile TV. Infrarosu pasiv nu emite nici un fel de radiatie care ar putea fi daunatoare, ci pur si simplu "vede in intuneric".
Radiatia in infrarosu pasiv este detectata de catre cei doi senzori piroelectrici 120˚ care detecteaza caldura pe care o emana corpurile. Cei doi pirosenzori au un domeniu de actiune de 180˚ cu un unghi de 90˚.
2.3 Senzori de gaz
Multi ani, detectia gazelor era utilizata doar in industria chimica si apoi in agricultura (sere legumicole sau horticole). De cativa ani detectia gazelor a devenit accesibila consumatorilor si instalatiilor comerciale. Se foloseste din ce in ce mai des detectia de monoxid de carbon pentru siguranta caminelor si detectia de dioxid de carbon pentru controlul ventilatiei in cladiri. Acest lucru a fortat proiectantii de senzori sa dezvolte detectori care sa fie atat siguri cat si eficienti din punct de vedere al costului. Proiectantii au incercat sa obtina senzori cu durata lunga de viata, sensibilitate ridicata, stabilitate cu temperatura si cu cicli de calibrare redusi. Modul de detectie a gazelor a evoluat ajungandu-se la tehnologii avansate cum ar fi:
electrochimica;
cu pelistori catalitici;
cu semiconductori;
cu radiatii infrarosii.
Senzorii de gaz pe infrarosu (IR), care fac parte dintre dispozitivele in stare solida, nu reactioneaza chimic cu gazul. De asemenea, ei pot fi realizati astfel incat sa detecteze anumite stari de functionare necorespunzatoare si sa alerteze utilizatorul. Cu alte cuvinte senzorii pe infrarosu nu creeaza situatii periculoase atunci cand apar probleme.
Un detector asociat este dotat cu un filtru optic astfel incat poate sa monitorizeze doar intensitatea unui anumit tip de banda de frecventa. Aceasta banda de frecventa este selectata pentru a se potrivi cu o banda de frecventa cuprinsa in spectrul de absorbtie a gazului vizat si iesirea detectorului este astfel afectata de concentratia gazului vizat. Frecventa radiatiei este mai des exprimata in lungimi de unda.
Caracteristica de iesire a senzorului este numita "absorbtie" si reprezinta pierderea procentuala a radiatiei infrarosii care atinge detectorul in prezenta si in absenta gazului vizat in celula cu gaz. Absorbtia este calculata folosindu-se semnalele masurate in absenta gazului (nu sunt absorbite radiatii infrarosii, ex: nitrogen) I0 si in prezenta gazului vizat, IG utilizand relatia:
A ![]()
Absorbtia creste cu:
- cresterea concentratiei de gaz;
- cresterea lungimii caii optice intre detector si sursa.
Cunoscandu-se dependenta absorbtiei de concentratia de gaz, pentru o lungime data a caii de la detector la sursa, un senzor va masura concentratia unui gaz functie de absorbtia masurata.
Un senzor simplu cu un singur canal interpreteaza orice pierdere a radiatiei infrarosii ca o consecinta a cresterii absorbtiei de catre gazul vizat.
In practica, pentru corectarea unor astfel de probleme se adauga senzorului un detector de referinta. In acest caz se foloseste un canal de referinta care masoara modificarile in radiatia infrarosie care nu sunt cauzate de gazul vizat.
Un canal de referinta ideal are exact aceeasi cale optica ca si canalul sensibil si nu are nici un fel de absorbtie de catre gazul vizat sau de catre alte posibile gaze de interferenta.
Dioxidul de carbon este un gaz fara miros, incolor si este toxic doar cand concentratia acestuia atinge de 25 de ori nivelul de concentratie normal din aerul ambiental (~380 ppm). Desi masurarea concentratiei deCO2 nu e usoara, e totusi mai putin dificila decat masurarea concentratiei monoxidului de carbon sau a formaldehidei. De aceea pentru determinarea calitatii aerului din spatii inchise se prefera masurarea dioxidului de carbon. Concentratia mare deCO2 din spatii inchise este indicatorul unor conditii sarace de ventilatie, ceea ce poate conduce la acumularea de alte gaze nocive si la probleme de sanatate ale celor care isi desfasoara activitatea in aceste spatii. Important de observat este ca dioxidul de carbon, la concentratiile la care se gaseste in mod normal in cladiri, de la 400 pana la 2000 ppm, nu este considerat un gaz nociv. . In medii industriale, conform OSHA (Agentia Europeana pentru Securitate si Sanatate in Munca) limita deCO2 pentru o expunere de 8 ore este de 5000 ppmv iar pentru o expunere de 15 minute de 30000 ppmv. In cladirile cu birouri, sali de conferinta, de cinema sau magazine nu se ajunge la asemenea concentratii.
Senzorul IR21AA este proiectat pentru detectarea si monitorizarea prezentei dioxidului de carbon in aerul ambiental cu concentratii intre 0 si 3000 ppmv (parts per million by volume) cu o rezolutie mai mica de 60 ppmv (2% FSD). IR21AA functioneaza normal in medii avand de la 0 pana la 100% umiditate relativa si temperaturi de la -10 la +50 ºC. Acest senzor este destinat in principal monitorizarii nivelelor deCO2 in aplicatii din horticultura si calitatea aerului.
Senzorul este construit din poliacetat rezistent la majoritatea acizilor slabi, bazelor si solventilor si de asemenea rezistent la expunerea indelungata la H2S (hidrogen sulfurat). Contine partea electronica primara de tratare a semnalului.
Senzorul are doi detectori de radiatii infrarosii. Filtrul de la detectorul "activ" este transparent la banda fundamentala de absorbtie a dioxidului de carbon. Asta permite utilizarea unei lungimi mici a caii optice mentinand o rezolutie satisfacatoare. Amplitudinea semnalului de iesire de la detectorul activ este redusa pe masura ce radiatia optica este atenuata la trecerea prin gazul ce dioxid de carbon. Detectorul "referinta" este insensibil la aceasta schimbare prin utilizarea unui filtru diferit.
2.4 Senzori de umiditate
Metoda cea mai precisa de determinare a umiditatii, luata in majoritatea cazurilor ca metoda etalon, este metoda cantaririi si compararii maselor ce apar in formulele de definitie. Fiind insa o metoda greoaie care comporta operatii ce dureaza destul de mult (necesita uscarea materialelor), este folosita numai cand este necesara o precizie foarte mare. Pentru masuratori rapide s-au construit aparate electronice de masurat, care se bazeaza pe variatia anumitor proprietati fizice ale materialelor cu continutul lor de umiditate.
Cantitatea de vapori de apa dintr-un amestec gazos se caracterizeaza prin umiditatea relativa si absoluta a acelui amestec.
Umiditatea absoluta - reprezinta cantitatea (masa) vaporilor de apa continuta intr-un metru cub normal de amestec gazos g / m3.
Umiditatea relativa reprezinta raportul dintre cantitatea vaporilor de apa continuta intr-un metru cub de gaz la aceeasi temperatura.
In procesul de masurare a umiditatii se foloseste uneori o marime specifica numita punct de roua care reprezinta temperatura la care vaporii de apa dintr-un gaz ajung la saturatie.
2.4.1 Umidimetre rezistive
Acestea folosesc fenomenul de scadere a rezistentei unui corp umed odata cu cresterea continutului de apa.
Intr-un anumit interval de masurare - in general la umiditati cuprinse intre 2 20 % - fenomenul este descris suficient de bine de ecuatia empirica:
log R = a - bUr
unde:
a si b sunt constante de material;
R - rezistenta ;
Ur - umiditatea relativa.
Conductibilitatea apei depinde de fapt de ionizarea partiala produsa de sarurile dizolvate. Acestea variaza ca natura si ca proportie in solutie de la un material la altul, rezultand necesitatea etalonarii aparatelor pentru fiecare material in parte.
Traductoarele rezistive constau, de obicei, din doi electrozi intre care materialul cercetat constituie rezistenta masurata. Ele sunt foarte variate, dat fiind multitudinea materialelor ce se masoara cu aceasta metoda. Cerintele specifice ce se impun celulelor de masurare sunt:
>
rezistenta
proprie foarte
> rezistenta mare de izolatie intre electrozi, de ordinul 1011 1013 ohmi (deoarece probele uscate pot avea rezistente foarte mari, ce nu trebuie sa fie suntate de rezistenta celulei);
> reproductibilitate a conditiilor de masurare (de exemplu, suprafata de contact cu proba sa fie constanta).
Masuratorile de rezistenta asupra materialelor umede sunt afectate de temperatura. Influenta temperaturii insa, are un caracter reproductibil si permite efectuarea de corectii direct asupra umiditatii citite in anumite intervale restranse de umiditate, aplicandu-se corectii constante.
Un alt fenomen care poate produce erori este polarizarea electrochimica la nivelul electrozilor sau in materialul umed, care apare in curent continuu. De aceea, se recomanda sa se lucreze in curent alternativ sau la un curent continuu care sa nu depaseasca cativa microamperi.
Metode de masurare a umiditatii
a) Cu senzor capacitiv: capacitate variabila - oscilator cu frecventa
variabila - masurare frecventa;
b) Cu traductor de impedanta: impedanta variabila - masurare
reflexie unde;
c) Cu senzor rezistiv: rezistenta variabila;
d) Cu generator de curent constant - Masurare tensiune - Convertor
Analog-Numeric;
e) Astabil - Convertor rezistenta - frecventa - aceasta metoda a fost
descrisa anterior la metoda de masurare a temperaturii cu termistor in circuit de astabil.
e.1 Contorizare impulsuri/timp fix;
e.2 Cronometrare numar fix de impulsuri.
Alte metode de masurare a umiditatii
Pentru a masura umiditatea se aplica metode prin care se realizeaza o dependenta intre diverse marimi fizice si umiditate.
Metoda gravimetrica - se bazeaza pe determinarea, prin cantarire, a cantitatii de apa absorbita de o substanta chimica dintr-o cantitate anumita de gaz analizat. Facand raportul dintre cantitatea de apa extrasa si volumul de gaz vehiculat (cantarind substanta inainte si dupa parcurgerea probei de gaz) se obtine valoarea umiditatii absolute.
Metoda higrometrica - se bazeaza pe modificarea directa sau indirecta a proprietatilor fizice ale unor substante in functie de umiditatea unui gaz de masurat.
Metoda punctului de roua - permite determinarea gradului de umiditate prin masurarea temperaturii de condensare (saturatie) a vaporilor de apa dintr-un gaz (punct de roua).
Metoda psihometrica - se bazeaza pe sesizarea cantitatii de caldura necesara procesului de evaporare a apei continuta intr-un volum de gaz. Masurarea umiditatii unui gaz cu ajutorul psihometrului se reduce, de fapt, la determinarea diferentei de temperatura dintre doua termometre cu termorezistente: un termometru masurand temperatura gazului uscat, iar al doilea - pe cea a gazului umed.
2.5 Senzori de lumina
Fotorezistentele (LDR - light dependent resistors) sunt componente electronice pasive ce isi modifica conductia electrica in functie de intensitatea radiatiei luminoase incidente pe suprafata fotosensibila. Fotorezistentele se pot utiliza atat in curent continuu cat si in curent alternativ. Rezistenta ohmica a fotorezistentei scade cu cresterea iluminarii. Valoarea fotorezistentelor depinde de modificarea temperaturii, ceea ce le afecteaza sensibilitatea la radiatia incidenta. Prin generarea termica de perechi electron-gol, temperatura cauzeaza zgomot termic, mai ales pentru nivele scazute ale iluminarii.
Caracteristicile de sensibilitate spectrala (Figura 2.3) ale fotorezistentelor sunt inguste si depind de material. Alegerea corecta a unei fotorezistente depinde de lungimea de unda a radiatiei urmarite. Cele mai cunoscute fotorezistente sunt cele realizate din sulfura de cadmiu si cele realizate din selenura de cadmiu. Fotorezistentele din CdS au o sensibilitate spectrala maxi m a pentru lungimea de unda de 600 nm, iar fotorezistentele din CdSe - pentru lungimea de unda de 720 nm. In domeniul radiatiilor infrarosii se utilizeaza fotorezistente din PbS, PbSe, InAs, Te, InSb care trebuie insa
racite cu elemente
Peltier sau in criostate pentru
reducerea zgomotului termic. Aceste tipuri de fotorezistente nu sunt insa
produse la scara industriala. 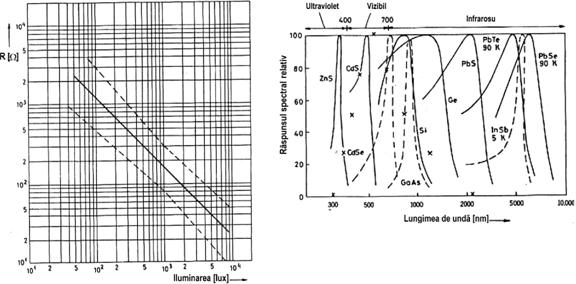 Fig. 2.3: Caracteristica
rezistenta - iluminare a unei fotorezistente
Fig. 2.3: Caracteristica
rezistenta - iluminare a unei fotorezistente
Timpul de raspuns este de ordinul zecilor si sutelor de milisecunde, si anume de aproximativ 10 ms pentru fotorezistentele din CdSe si 100 ms pentru cele din CdS. De altfel, viteza mica de raspuns reprezinta un dezavantaj al fotorezistentelor.
Parametrii cei mai importanti ai fotorezistentelor sunt:
rezistenta de intuneric R0, definita ca rezistenta electrica a fotorezistentei neiluminate;
sensibilitatea specifica,
definita ca raportul ![]() unde If
reprezinta curentul prin fotorezistenta atunci cand este alimentata la o tensiune
U si este iluminata cu fluxul luminos
unde If
reprezinta curentul prin fotorezistenta atunci cand este alimentata la o tensiune
U si este iluminata cu fluxul luminos ![]() l.
l.
Dintre caracteristicile cele mai semnificative se specifica urmatoarele:
Caracteristica curent-tensiune, care reprezinta dependenta curentului prin fotorezistenta de tensiunea la borne, luand iluminarea Il ca parametru;
Dependenta rezistentei de iluminare (figura 2.3);
Caracteristica de raspuns spectral (figura 2.3).
Fotorezistentele au preturi dar si performante mai scazute si sunt utilizate la masurarea parametrilor radiatiei luminoase (controlul automat al luminozitatii si contrastului la camerele TV, reglajul automat al diafragmei la aparatele fotografice, controlul iluminatului public) sau in aplicatii pentru care indirect se foloseste lumina (detectoare de fum, traductoare optice de nivel).
2.6 Senzori de fum
Sistemul folosit in proiect de tipul RM125, este constituit pe baza unui detector cu camera optice, care verifica existenta fumului in aer. Detectorul nu reactioneaza insa la temperaturi inalte, gaze sau foc. Daca acesta este montat si intretinut corect, el va declansa alarma in timp util. Astfel, in cazul unui incendiu, sistemul va va oferi cateva secunde necesare evacuarii rapide a casei, si anuntarea pompierilor. Sistemul este proiectat pentru detectarea fumului dar nu poate preveni un incendiu. Va rugam sa cititi cu atentie instructiunile de mai jos inaintea utilizarii sistemului. Sistemul de alarma functioneaza cu baterii de tip 9V DC. In conditii de utilizare normala, bateriile ar trebui sa functioneze cel putin un an de zile. Daca bateriile sunt aproape consumate, sistemul va emite un semnal audio intermitent, la intervale de 30-40 secunde, timp de cel putin 7 zile. Cand primiti acest semnal puteti inlocui bateriile. Din seria bateriilor 9V DC, puteti folosi doar urmatoarele: Gold Peak 1604P, Premisafe G6F22, Everready 216, Energizer 522, Duracell MN1604. Reguli de amplasare a sistemelor de alarma:
-cel putin doua alarme intr-o cladire; -un sistem pe fiecare etaj;
-un sistem pe scara interioara si unul pe hol; -deasupra usilor fircarui dormitor; -in fiecare camera (daca dormiti cu usa inchisa); -in camera de zi; -in spatiile de depozitare sau in camerele ce contin echipament electric.
Sistemul nu poate fi montat in urmatoarele conditii: -in camere in care temperatura este mai scazuta de 4C sau peste 40C;
in spatii umede; - in fata usilor, ferestrelor, ventilatoarelor sau radiatoarelor;
Sistemele de alarma sunt la fel de necesare in cazul incendiilor ca si stingatoarele de foc, corzile si scarile de urgenta, nu numai in cazul cladirilor locuite, dar si in timpul renovarilor si constructiilor. Trebuie sa ne asiguram ca exista un plan de evacuare al cladirii si sa-l prezentati si copiilor care locuiesc in ea. De asemenea, din fiecare camera sa se poata iesi fara deschiderea usii, cum ar fi pe fereastra. In cazul in care nu suntem siguri de motivul declansarii alarmei, va trebui sa luam ca prima optiune incendiul si sa evacuam casa imediat.
CAPITOLUL 3
SISTEME PENTRU CASA INTELIGENTA
Sistemele de automatizare a casei pot fi impartite in trei categorii generale bazate pe nevoia lor de a contine un PC:
Sisteme bazate pe PC: au nevoie de un PC tot timpul.
Sisteme autonome: merg fara un PC, dar se programeaza prin PC.
Sisteme hibride: merg fara un PC, dar folosesc un PC pentru adaugare de functii.
Daca mentinerea unui PC functionand tot timpul nu este o optiune buna, se va alege un sistem de sine statator. Daca un PC este o optiune viabila, se vor lua in considerare toate trei tipurile de sisteme. Fiecare tip are avantaje si dezavantaje si este importanta intelegerea lor.
3.1.1 Sisteme bazate pe PC
PC dedicate
Computerul este folosit doar pentru automatizarea casei, neruland alte programe.
PC folosit in comun
Pe langa rularea software-ului de automatizare, PC-ul mai este folosit si pentru alte scopuri.
Ambele tipuri de sisteme au multe in comun si sunt discutate impreuna. Produse de automatizare bazate pe PC sunt prezente relativ in numar mare pe piata. Cateva dintre ele sunt doar software si necesita cumpararea de dispozitive hardware separate.
3.1.2 Sisteme hibride
Un sistem hibrid este un sistem de sine statator, folosit in conjunctie cu software PC. De obicei, partea de sine statatoare este responsabila de cele mai multe functii de automatizare si va functiona chiar cand PC-ui este oprit. Software-ul PC este folosit pentru a adauga capabilitati care nu exista in sistemul de sine statator. Asemenea sisteme combina capabilitatile altor sisteme, avand, de obicei, performante maxime..
. CPU-XA/Ocelot
. HomeBase
. HomeVision
. Jds TimeCommander, Time Commander Plus si StarGate
3.1.3 Software folosit pentru a interfata cu aceste sisteme de sine statatoare:
. Software-ul venit cu sistemul
. ACE (folosit cu HomeVision)
. ECS (folosit CU HomeVision si Time Commander Plus)
. HAL2000(folosit cu HomeVision, HomeBase si JDS)
. HomAtion 2000 (folosit cu HomeVision)
. HoomeSeer (folosit cu CPU-XA/Ocelot)
. Home Voice(folosit cu HomeVision, HomeBase si JDS)
.Software-ul BMS permite folosirea de diverse tipuri de suporturi fizice pentru retea cum ar fii ; RS 232, RS 485, RS 422 Ethernet, radio Network, linii telefonice si posibilitatea de a folosi mai multe protocoale pe acelasi port de iesire .
Software-ul BMS permite afisare de panele diferite pe computer-ele din retea si permite monitorizarea si controlul in timp real chiar si in cazul folosirii retelei de tip dia-up. Sistemul isi poate configura si verifica toate canalele de comunicatie background fara a perturba functionarea programului principal ,are o baza de date performanta cu o mare viteza de arhivare si compresie de date pentru folosire eficienta a spatiului pe hard disk si posibilitatea de declansare a inregistrarii bazata pe criterii diverse .De asemenea are posibilitatea de a introduce in baza de date o supraveghere permanenta bazata pe principiul "cine ce face si unde " . Fiecare inregistrare contine toate caracteristicile item-ului ; nume valoare, alarma , prioritate, unitatea de masura, descriere punct. Exista posibilitatea salvari in baza de date , pe suport extern la comanda manuala sau automat declansata de evenimente interne sau externe .
Software-ul BMS permite controlul statistic al procesului folosind histograme, bare-X, deviatie standard si controlul de algoritmi ,secvente rampa, numaratoare,etc. Dimensiunea bazei de date este nelimitata software si doar capacitatea hard-disk-ului limiteaza numarul de inregistrari. El are o metoda eficienta de compresie a datelor salvand spatiul. Inregistrarile pot fi arhivate pe suport extern la cerere, programat sau declansat de diferite evenimente. In cadrul sistemului se poate face arhivarea pe unitatea de banda magnetica (streamer) cu care este dotat serverul de retea .Interfata grafica cu operatorul uman are panele si ferestre perfect configurabile, astfel incat se poate controla afisarea rapoartelor, a alarmelor sau a altor tipuri de informatii cerute de operator, pe o statie locala sau pe retea astfel incat panela sa poata fi disponibila local sau distribuita in retea . Se poate face zoom pe detaliile din planurile generale deschizand astfel ferestre cu informatii detaliate despre zona respectiva.
3.1.4 Sisteme autonome
Sistemele autonome evita cele mai multe dintre problemele de fiabilitate asociate cu sistemele bazate pe PC. Nu este alt software care sa cauzeze o defectiune si nu este nevoie de ingrijorare ca cineva va inchide programul de automatizare sau va lasa un disk in floppy. Hardware-ul este mai fiabil, nu sunt surse mari, ventilatoare sau harddisk-uri. Numarul total de componente este mult mai mic, deci, sunt mai putine puncte posibile de defectiune.
Deoarece sistemele autonome sunt special concepute pentru automatizarea de casa, incorporeaza caracteristici care maresc fiabilitatea. De exemplu, HomeVision are un ,,watch dog timer" incorporat. Daca are loc o eroare mare, unitatea va fi restartata in cateva secunde. Are circuite care detecteaza caderile in reteaua de alimentare, poate sti daca evenimentele care trebuiau sa se intample cand alimentarea era cazuta s-au intamplat si sa le indeplineasca la revenirea tensiunii.
Din motivele de mai sus, sistemele autonome au fiabilitatea superioara sistemelor PC. Orice masuri s-ar lua pentru cresterea fiabilitatii sistemelor bazate pe PC (chiar adaugarea de procesoare si harddisk-uri redundante), nu se va putea atinge nivelul de fiabilitate al unui sistem autonom.
Problema principala la aceste sisteme este software-ul. Software-ul ruleaza intreg sistemul de automatizare, incluzand interfetele cu temporizari critice, care este o sarcina complexa. Pentru multe sisteme, poate rula X-10, infrarosu si comunicatii seriale simultan, lucru care cere control si raspuns la nivel de microsecunde. Scrierea, testarea si depanarea de asemenea software este un lucru mai dificil decat pentru aplicatiile bazate pe PC. Deci, greselile sunt mai probabile. La selectarea unui astfel de sistem se recomanda alegerea unuia care este de mai mult timp pe piata si are defectele remediate.
O serie intreaga de astfel de sisteme se gasesc pe piata, cele mai importante fiind:
. CPU-XA/Ocelot
. HomeBase
. HomeVision
. HouseLinc
. Jds TimeCommander, Time Commander Plus si StarGate
. Omni si OmniPro
Unele dintre aceste sisteme pot intra si in categoria hibrid, putand interactiona cu software PC pentru functii aditionale
Aceasta sectiune compara caracteristicile celor trei tipuri de sisteme. Se pot gasi sisteme cu largi game de proprietati in fiecare categorie.
3.2.1 Factorul functionalitate oferita
Unele sisteme bazate pe PC pot comunica cu alt software. Aceasta permite utilizatorilor sa adauge alte programe sau sa scrie propriul lor program care sa adauge capabilitati la sistem. Totusi, multe pachete software nu ofera aceasta abilitate, necesitand cumpararea add-on-urilor de firma.
Sisteme hibride
Multi noi utilizatori ai automatizarilor de casa vor toate functiile pe care le ofera sistemele bazate pe PC, initial crezand ca au nevoie de un sistem bazat pe PC. Exista insa a treia optiune: un sistem hibrid. Sistemul autonom poate oferi functiile principale de automatizare, iar software-ul de PC ar putea oferi ceea ce lipseste. Un sistem autonom poate oferi aceleasi functiuni ca si un sistem bazat pe PC pentru mai putini bani si fiabilitate mai mare.
Aceasta sectiune compara fiabilitatea celor trei tipuri de sisteme. Aici exista diferentele cele mai mari.
Sisteme bazate pe PC
Problemele potentiale cu fiabilitatea sistemelor bazate pe PC sunt divizate in cinci categorii.
1) Caderi ale retelei de alimentare
O scurta cadere a retelei poate cauza inchiderea PC-ului, cauzand inoperabilitatea sistemului de automatizare de casa. Un UPS poate elimina aceasta problema pentru caderi scurte de tensiune, dar cele mai lungi vor inchide un PC. Nu este prea deranjant ca sistemul nu functioneaza cand nu este tensiune, dar se doreste ca sistemul sa porneasca atunci cand tensiunea va reveni. Unele PC-uri vor reporni cand tensiunea va reveni, dar multe, in special cele mai vechi, nu vor reporni. Daca PC-ul nu porneste automat, nu se poate obtine un sistem fiabil.
Cand PC-ul reporneste, se doreste ca si soft-ul de automatizare sa porneasca. Acest lucru se poate face prin plasarea unui shortcut in directorul de startup al Windows-ului. Totusi, sunt mai multe lucruri care pot merge rau in timpul procesului de boot-are:
Un program de pe harddisk indica o problema la start. Comune sunt la utilizatori problemele care apar atunci cand sistemul nu a fost inchis corect. Unele programe vor afisa un mesaj de confirmare pentru rezolvarea problemei. Daca nu este nimeni care sa faca asta, PC-ul nu va boota si nu vom avea un sistem de automatizare. Programe ca Norton Utilities pot gasi o problema la disk in 25% din cazuri de rebootare dupa o cadere de tensiune. Daca se folosesc programe care ruleaza la startup, ar trebui sa existe o optiune pentru a se indeparta nevoia de raspuns de la utilizator.
Chiar daca software-ul de automatizare restarteaza dupa o cadere de tensiune, va putea sa mentina sistemul in ordine? De exemplu, daca sistemul a fost oprit intre 5:45PM si 6:15PM, si lumina trebuia aprinsa la 6:00 PM , va sti ca nu rula la 6:00 PM si lumina nu a fost aprinsa?
2) Resetari PC
Sistemul de automatizare va mai functiona dupa resetare? Nu daca programul de automatizare a fost intrerupt si daca tot sistemul de automatizare a fost intrerupt. Este imposibil de scris software care sa fie complet stabil pentru Windows. Desi Windows NT reduce probabilitatea sa fie afectat un alt program, nu este perfect. Daca se foloseste un PC dedicat, probabilitatea va scadea forte mult.
Daca nu se poate evita o resetare, sistemul se poate recupera din ea? Singura solutie stiuta este folosirea de carduri ,,watch dog timer" in PC. Software-ul trebuie sa scrie repetat in ,,watch dog timer" dupa o anumita perioada de timp, daca nu, PC-ul se va reseta.
Sunt doua moduri de a scrie catre ,,watch dog timer". Cele mai multe carduri ,,watch dog timer" merg impreuna cu un software care functioneaza continuu in fundal si scrie periodic catre ,,watch dog timer". Daca PC-ul se blocheaza si programul ,,watch dog timer" nu mai ruleaza, cardul va reseta PC-ul. Totusi, este un defect in asta: daca doar software-ul de automatizare se blocheaza si nu si programul ,,watch dog timer", PC-ul nu se va reseta. Deci, problemele ,,minore" nu vor fi prinse de cardul ,,watch dog timer" si sistemul de automatizare nu va functiona pana cand nu se va restarta manual.
Problema poate fi evitata daca programul de automatizare scrie catre card in loc de programul ,,watch dog timer". Metoda aceasta este ideala, pentru ca orice blocheaza programul de automatizare va reseta PC-ul. Dar acest lucru este posibil doar cu un program de automatizare care a fost scris pentru un anume card ,,watch dog".
3) Software-ul este oprit
Daca cineva care foloseste PC-ul inchide programul de automatizare, intentionat sau accidental, sistemul nu va functiona pana cand software-ul nu este pornit.
4) Defectare de PC
Daca PC-ul se defecteaza, sistemul de automatizare nu va functiona. PC-urile sunt concepute pentru o viata de 5 ani si defectiunile survin ocazional. Un PC contine multe parti care se pot defecta. Mii de contacte, de conectori sunt susceptibile la probleme. Hard disk-urile si ventilatoarele se uzeaza, sursele se defecteaza din cauza supraincalzirii.
Un PC este foarte susceptibil de a fi deteriorat de catre fulgere, deoarece este conectat si la linia telefonica, pe langa linia de alimentare. Un UPS de generatie mai veche nu protejeaza impotriva fulgerelor.
5) Probleme hardware ale automatizarii
PC-ul va fi dotat cu interfete hardware pentru comunicarea cu casa. Probabil va avea un dispozitiv pentru comunicatii X-10. Daca se doresc capabilitati ca infrarosu, intrari digitale, intrari analogice, va fi nevoie de mai multe dispozitive conectate la PC . Toate sunt susceptibile la probleme ca:
Cu cat sunt mai multe dispozitive conectate la PC, sansa de a avea probleme creste. Concluzia este ca in ceea ce priveste fiabilitatea la sistemele bazate pe PC, numai un PC dedicat (cu UPS, watch dog timer) va fi fiabil. Din acest motiv, foarte putini utilizatori vor alege un sistem bazat pe PC; nu isi pot permite ca sistemul sa se defecteze, mai ales cand proprietarul nu este acasa si sistemul controleaza HVAC si functiile de securitate.
Sisteme hibride
Fiabilitatea sistemelor hibride este, de obicei, determinata de cea a dispozitivelor autonome. Deoarece acestea sunt destul de fiabile, atunci si functiile de automatizare pe care le indeplinesc sunt fiabile. Partea de software PC are aceleasi probleme ca si sistemele bazate pe PC. Totusi, daca software-ul de PC se opreste, functiile de automatizare de baza (rulate de sistemul autonom) vor rula. Poate ca recunoasterea vocala si accesul la Internet se vor pierde, dar securitatea, HVAC, si sistemele de iluminare vor continua sa functioneze.
Sisteme bazate pe PC
Un PC consuma destul de mult atunci cand functioneaza. Monitorul poate fi inchis, el consumand cea mai multa energie. De exemplu, un sistem de 50 Watt necesita 438 kilowattora pe an. La un pret de 10 centi pe kilowattora, se ridica la 44 $ pe an.
Sisteme autonome
Cele mai multe sisteme autonome sunt foarte eficiente . De exemplu, sisteme ca HomeVision, HouseLinc, si TimeCommander necesita mai putin de 1 Watt costand cam 1 $ pe an. Deoarece consumul este atat de mic, se poate lega la un UPS si sistemul poate functiona multe zile atunci cand reteaua nu functioneaza. Desi sunt anumite capabilitati care nu sunt necesare cand nu este tensiune, (cum ar fi aprinderea luminilor) exista cateva situatii cand ar fi utila:
Sisteme hibride
Deoarece sistemele hibride necesita un sistem autonom si un PC, va consuma cat suma celor doua.
Sisteme bazate pe PC
Folosirea unui PC dedicat
necesita spatiu pentru el. Daca se amplaseaza intr-un spatiu restrans, trebuie sa se lase loc pentru PC, tastatura si monitor.
Sisteme autonome
Cele mai multe sisteme autonome sunt destul de compacte. De exemplu, sisteme ca HomeVision, HouseLinc si TimeCommander sunt de dimensiuni 2" x 5" x 6" si pot incapea aproape oriunde. Sistemele high-end sunt mai mari, unele de marimea unui PC (de fapt unele sunt, de fapt, PC -uri deghizate).
Sisteme hibride
Deoarece sistemele hibride necesita un sistem autonom si un PC, va ocupa cat suma celor doua.
Sisteme bazate pe PC
Atat harddisk-ul cat si ventilatorul fac zgomot. Daca acest lucru este o obiectie, depinde de locul unde este PC-ul si cat de aproape este de locatari.
Sisteme autonome
Cele mai multe sisteme autonome nu fac zgomot de loc (poate cu exceptia releelor care comuta).
Sisteme hibride
Deoarece sistemele hibride necesita un PC, va face zgomot ca un PC.
3.2.6 Concluzii
Fiecare utilizator va evalua tipurile de sisteme si va determina care este cel mai potrivit pentru ei. Totusi, pentru multi utilizatori, fiabilitatea va fi factorul cel mai important. Initial, utilizatorii nu sunt prea preocupati de fiabilitate, dar cu trecerea timpului nu vor mai tolera defectiuni repetate ale sistemului. Isi vor da seama ca este foarte periculos daca sistemul de securitate sau de incalzire se defecteaza in timpul vacantei.
Un sistem bazat pe PC va avea inevitabil mai multe probleme decat unul autonom bine conceput.
3.3 Niveluri ale automatizarii casei
Pentru automatizarea casei este disponibila o gama de dispozitive si produse software. Este necesara o informare prealabila pentru a afla ce nivel de control se doreste. Prin nivelul de control se intelege arhitectura de baza a sistemului. Sistemele de automatizare a casei se impart in 5 nivele bazate pe mai multi factori. Factorii sunt, in principal complexitatea si functionalitatea. Acesti factori determina nivelul de sofisticare si tipul de hardware si software folosit. Aceste 5 nivele sunt:
Control cu telecomanda;
Macro-uri;
Control conditional;
Interactiv;
Invatare.
Nivelul 1 - Control cu telecomanda
Nivelul 1 este cel mai simplu si include controlul simplu al luminilor si al aparatelor casnice folosind un transmitator si un receptor. Nu exista hardware intermediar.
Nivelul 1 poate include un controler de tip timer pentru a porni dispozitivul la un anume timp al zilei si mai poate include un controler RF.
Sistemul de nivel 1 poate fi ieftin. Consta in controlarea a cate unui dispozitiv alternativ si controlul se face de la un transmitator direct catre un receptor.
Diagrama bloc nivelul 1
Nivelul 2 adauga o capabilitate de macro. Un macro este capabilitatea de a folosi o comanda pentru a controla mai multe dispozitive. O singura comanda poate regla luminile, inchide draperiile, pune muzica si umple cada cu apa. Un macro poate rula un alt macro. Programarea macro-urilor se poate face de pe alt controler sau de pe un computer. Aceste dispozitive sunt, de fapt, controlere sofisticate care nu au nevoie de un PC pentru a functiona. Nivelul 2 are hardware sau software intermediar.
Diagrama bloc nivelul 2
Controlerul de macro poate avea un timer si poate initia singur comenzi. De exemplu, poate stinge si aprinde lumina la anumite ore. Controlere mai sofisticate de nivel 2 stiu data la care rasare si apune soarele.
Nivelul 3 - Control conditional
La nivelul 2 exista un transmitator sofisticat dar nu monitorizeaza actiunile sau nu face control conditionat. Nivelul 3 are abilitatea de a face control conditionat. De exemplu, activeaza un dispozitiv de sunet daca este noapte si usile garajului au fost deschise mai mult de 15 minute sau aprinderea luminilor din casa la timpi intamplatori daca aceasta nu este ocupata. Controleaza incalzirea si ventilatia bazat nu doar pe temperatura camerei ci si pe temperatura de afara.
In general, dispozitivele sunt controlate de PC sau sunt bazate pe un controler cu procesor dedicat. Unul dintre cele mai bune controlere de pe piata, care poate face control conditional este un pachet software de la HomeSeer Technologies numit HomeSeer. Acest software ruleaza pe un PC tipic conectat la diverse dispozitive prin porturile standard al PC.
Nivelul 4 - Interactiv
Pana aici, controlul manual al dispozitivelor se realizeaza printr-un control cu butoane si intrerupatoare. Controlul poate fi o tastatura, telecomanda, ecran cu atingere sau un senzor; interfata nu este interactiva. Nivelul 4 introduce interfata interactiva. Cu un sistem interactiv, utilizatorul nu doar da comenzi, dar pot vedea si starea sistemului. Interfata cu sistemul se poate face prin PC, site web, recunoastere vocala, instant messenger, e-mail, telefon sau alte sisteme. Aceste sisteme sunt bazate pe PC, HomeSeer fiind un produs reprezentativ.
Cateva exemple despre ceea ce se poate face cu un controler interactiv.
Nivelul 5 - Invatare
Nivelul 5 incorporeaza invatarea. Actiunile sistemului se pot schimba automat, bazate pe actiunile utilizatorului. Sistemul se poate reprograma singur. De exemplu, daca sistemul detecteaza ca cineva pune in functiune un aparat la o anumita ora in weekend, va incorpora acest lucru in program. La nivele superioare, produse ca HomeSeer are capabilitatea de a rula scripturi si a modifica aceste scripturi.
CAPITOLUL 4
Prezentarea generala a automatelor programabile
4. 1 Generalitati
4.1.1 Dezvoltarea in timp a automatelor programabile
La sfarsitul anilor 1960 automatele programabile au fost pentru prima oara introduse. Motivul principal pentru realizarea unui astfel de aparat a fost eliminarea costurilor mari necesare pentru a inlocui complicatul sistem de control al masinilor bazat pe relee. Bedford Associates (Bedford, Massachusets) au propus ceva intitulat Controler Modular Digital (MODICON) unui mare producator de autovehicule din SUA. Alte companii atunci au propus scheme bazate pe computere, una din ele fiind bazata pe PDP-8. MODICON 084 a fost primul automat programabil produs pentru comercializare.
Cand nevoile de productie s-au schimbat, acelasi lucru s-a intamplat si cu sistemul de control. Acesta devine foarte scump cand schimbarea este frecventa. Deoarece releele sunt dispozitive mecanice ele au o viata limitata ce necesita o respectare stricta a programelor de intretinere. Defectiunile erau destul de problematice cand atat de multe relee erau folosite. Imaginati-va un panou de comanda a unei masini ce include multe, poate sute sau mii de relee individuale. Dimensiunea poate intrece imaginatia. Ce ziceti de legarea initiala a atat de multe dispozitive! Existau probleme? Bineinteles!
Aceste "controlere noi" trebuiau sa fie usor de programat de inginerii fabricii si cei de intretinere. Durata de viata trebuia sa fie lunga si schimbarile de program sa fie usor de realizat. Trebuiau de asemenea sa reziste durului mediu industrial. Acestea sunt niste cerinte destul de mari! Rezultatul a fost utilizarea unei tehnici de programare cu care majoritatea oamenilor era deja familiarizata si inlocuirea partilor mecanice cu altele mai solide.
La mijlocul anilor 70 tehnologiile automatelor programabile au fost masinariile secventiale si bazate pe procesoare. AMD-urile 2901 si 2903 au fost foarte populare in automatele Modicon si A-B. Microprocesoarele conventionale
nu aveau puterea sa rezolve rapid logica automatelor programabile in mare dar se puteau folosi la cele mai mici dintre ele. Cu evolutia microprocesoarelor conventionale au aparut automate programabile din ce in ce mai mari bazate pe ele. Oricum, chiar si azi cateva sunt inca bazate pe 2903(A-B PLC3). Modicon n-a construit un automat mai rapid decat 984A/B/X care a fost bazat pe 2901.
Abilitatile de comunicare au inceput sa apara cam in 1973. Primul astfel de sistem a fost Modbus de la Modicon. Automatele pot comunica cu alte automate programabile si puteau fi departe de masinaria pe care o controlau. Puteau fi folosite de asemenea pentru a trimite si primi voltaje variate pentru a le permite sa intre in lumea analogica. Din nefericire, lipsa standardizarii impreuna cu tehnologia in continua schimbare a facut ca comunicarea intre automate sa devina un cosmar de protocoale incompatibile si retele fizice. Si totusi a fost o decada foarte reusita pentru automatele programabile.
Anii 80 au adus o incercare de standardizare a comunicatiilor cu Protocolul Manufacturii Automatizate (MAP) de la General Motors. A fost si perioada in care s-au redus dimensiunile automatelor programabile si introducerea programarii soft-ului prin programarea simbolica pe PC-uri in loc de terminalele de programare sau dispozitivele de programare. Astazi, cel mai mic automat programabil este de dimensiunea unui singur releu de control!
Anii 90 au vazut o reducere graduala a introducerii de noi protocoale si modernizarea structurii fizice a catorva dintre cele mai populare protocoale care au supravietuit anilor 1980. Ultimul standard a incercat sa uneasca limbajul de programare a automatelor sub un standard international. Acum avem automate care sunt programabile cu ajutorul Grafcet-urilor, a listei de instructiuni, C-ului si textului structurat, toate in acelasi timp! PC-urile sunt de asemenea folosite pentru a inlocui automatele in anumite aplicatii. Compania initiala care a realizat MODICON 084 a trecut la realizarea unui sistem de control bazat pe PC.
4.2 Teoria operatiei
Un sistem de comanda programabil consta in mod tipic dintr-un automat programabil , ca si din senzori, elemente de actionare si elemente de semnalizare.
Automatul programabil insusi consta in principal din modulul unitate centrala (CPU) cu procesor si memorie de program, module de intrare/ iesire, sistemul de magistrala si modulul de alimentare.
Semanlele de tensiune generate de senzori sunt aplicate direct la terminalele modulului de intrare (intrari in automatul programabil).
Porcesorul din modulul CPU executa programul stocat in memorie si scaneaza intrarile automatului pentru a detecta prezenta sau absenta tensiunii. Depinzand de starile intrarilor si de programul memorat, procesorul comanda modului de iesire sa aplice tensiuni la terminalele de iesire respective.
Nivelele de tensiune la aceste iesiri ale automatului activeaza sau dezactiveaza elementele de actionare, elementele de semnalizare, etc.
Magistrala de sistem este o cale pentru transmisia semnalelor. In automatul programabil, ea raspunde de schimbul de semnale intre procesor si modulele de intrare/ iesire.
Magistrala cuprinde mai multe linii de semnal paralele:
magistrala de adrese, care selecteaza adresele (locatii de memorie) ale modulelor;
magistrala de date, care transfera date (continuturi ale locatiilor de memorie), de exemplu de la modulele de intrare la cele de iesire.
Magistrala de comenda, care transporta semnale de ocmanda si de sincronizare pentru sincronizarea activitatilot CPU in automatulprogramabil.
Modulul sursa de alimentare genereaza tensiuni interne de la alimentarea generala, pentru alimentarea modulelor electronice din automatul programabil. Marimea acestei tensiuni este de 5V.
Procesorul automatului programabil scaneaza intrarile pentru "tensiune prezenta" si, depinzand de programul inmagazinat si de rezultatul operatiei de scanare, elementele de executie sunt comutate "ON" sau "OFF".
Ambele stari sunt clar deosebite. Urmatoarea terminologie este utilizata pentru sistemele electronice de comanda:
STARE SEMNAL "0" = TENSIUNEA ABSENTA = OFF
STARE SEMNAL "1" = TENSIUNEA PREZENTA = ON
Aceste stari ale semnalelor corespund la doua valori posibile ale unui semnal binar . Termenul "semnal binar" este utilizat nu numai pentru a descrie starile intrarilor si iesirilor, ci si stari ale acelor elemente care sunt raspunzatoare de prelucrarea semnalelor in automatul programabil.
Intr-un automat programabil , starile semanlelor a opt intrari sau opt iesiri sunt combinate pentru a forma un "octet de intrare" (IB = Input Byte) sau un "octet de iesire " (QB ). Fiecare cifra binara a unui octet are valoare "0" sau "1". In automatul programabil se prelucreaza in mod obisnuit intregul octet, adica toti cei opt biti impreuna.
Combinatia a 16 cifre binare consecutive constituie un cuvant. Starile semnalelor a 16 intrari sau iesiri ale unui automat programabil pot fi combinate pentru aforma un "cuvant de intrare" (IW = Input Word) sau un "cuvant de iesire" (QW = Output Word).Pentru a face accesibil fiecare bit individual dintr-un octet, se aloca o adresa de bit pentru fiecare bit. Bitului din extrema dreapta a unui octet I se aloca adresa de bit "0", iar celui din extrema stanga adresa de bit "7".
Octetii individuali sunt de asemenea accesati prin numere, adica adrese de octet. Bitii individuali sunt identificati in mod unic de o combinatie de adrese de octet si de bit, cele doua fiind separate printr-un punct. Adresa de octet este in stanga punctului, iar adresa de bit in dreapta punctului.
Adresa de cuvant este formata prin numararea cuvintelor. IW2, de exemplu, identifica cuvantul de intrare 2 cuprinzand octetii de intrare 2 si 3.
4.3 Numaratoare
Un numarator este un simplu dispozitiv ce trebuie sa faca un singur lucru - sa numere.
Exista trei feluri de numaratoare:
Ø numaratoare crescatoare;
Ø numaratoare descrescatoare:
Ø numaratoare mixte.
Numaratoarele normale de mai sus sunt de obicei numaratoare "software". Cu alte cuvinte, ele nu exista fizic in automatul programabil ci sunt simulate in softul acestuia. Numaratoarele hardware exista in automat si nu sunt dependente de timpul de scanare. O buna regula de numarare este sa folosim numaratoarele normale (software) daca impulsurile pe care le numaram nu vin mai rapid decat 2X timpul de scanare. (de ex. daca timpul de scanare este 2ms si impulsurile vin la 4ms sau mai tarziu atunci folosim numaratoare software. Daca insa sosesc mai rapid de 4ms (3ms de exemplu) atunci folosim numaratoare hardware (de mare viteza). (2xtimpul de scanare = 2x2ms = 4ms).
Ca sa le folosim trebuie sa cunostem 3 lucruri:
1. De unde vin impulsurile pe care dorim sa le numaram. De obicei vin de la una din intrari (un senzor conectat la intrarea 0000 de exemplu).
2. Cate impulsuri dorim sa numaram inainte sa reactionam. Sa numaram 5 mingii, inainte sa le ambalam, de exemplu.
3. Cand/cum vom reseta numaratorul ca sa numere din nou. Dupa ce numaram 5 mingii sa resetam numaratorul, de pilda.
Cand programul ruleaza in automatul programabil de obicei afiseaza valoarea curenta sau "acumulata" pentru ca sa vedem valoarea curenta din numarare. Numaratoarele tipice pot numara de la 0 la 9999.
Primul este linia de
resetare. Cand aceasta intrare este pornita valoarea curenta (acumulata) de
numarare se va intoarce la zero.
A doua intrare este adresa de unde vin impulsurile pe care le numaram. De
exemplu, daca numaram cate mingii trec prin fata senzorului care este fizic
conectat la intrarea 0001 atunci trebuie sa punem contacte normal deschise cu
adresa 0001 in fata liniei de impulsuri.
Cxxx este numele numaratorului. Daca vrem sa-l numim numaratorul 000 atunci vom pune "C000" acolo. yyyyy este numarul de impulsuri pe care vrem sa le numaram inainte de a face ceva. Daca dorim sa numaram 5 mingii inainte de a porni o iesire fizica pentru a le ambala, atunci acolo vom pune 5.
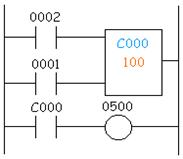
Aici este simbolul pe o scara ce ne arata cum sa setam un numarator (pe care il vom numi numaratorul 000) sa numere 100 de mingii de la intrarea 0001 inainte de a porni iesirea 0500. Senzorul 0002 reseteaza numaratorul.
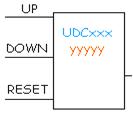
La acest contor crescator-descrescator ne trebuie sa stabilim 3 intrari. Intrarea de resetare are aceeasi functie ca mai sus. Insa, in loc sa avem doar o intrare pentru numararea impulsurilor acum avem 2. Una este pentru numararea crescatoare iar cealalta este pentru numararea descrescatoare.
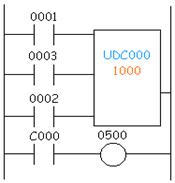
In acest exemplu ii vom zice numaratorului UDC000 si ii vom da o valoare presetata de 1000. (Vom numara 1000 de impulsuri). Pentru intrari vom folosi un senzor ce porneste intrarea 0001 cand vede o tinta si un alt senzor la intrarea 0003
care de asemenea o porneste cand vede o tinta. Cand intrarea 0001 este pornita numaram crescator iar cand intrarea 0003 este pornita numaram descrescator. Cand ajungem la 1000 de impulsuri vom porni iesirea 500.
4.4 Temporizatoare
Temporizatorul este o instructiune ce asteapta un timp predefinit inainte de a face ceva.
Tipuri de temporizatoare :
Temporizator On-Delay - Acest tip de temporizator porneste "un timp de intarziere". Cu alte cuvinte, dupa ce senzorul nostru (intrarea) porneste asteptam x secunde inainte de a activa un solenoid (iesire). Acesta este cel mai comun temporizator.
Temporizator Off - Delay - Acest tip de temporizator este opusul temporizatorului on-delay de mai sus. Acest temporizator "amana oprirea". Dupa ce senzorul (intrarea) vede o tinta porneste un solenoid (iesire). Cand senzorul nu mai vede tinta, tinem solenoidul pornit pentru inca x-secunde inainte de al opri. Acest tip este mai putin utilizat decat cel "on-delay" de mai sus.
Temporizator cu retinere sau cu acumulare Acest tip de temporizator necesita 2 intrari. O intrare porneste cronometrarea si cealalta o reseteaza.
Temporizatoarele de mai sus vor fi resetate daca senzorul de intrare nu este pornit/oprit pentru intreaga durata a temporizarii. Acest temporizator insa tine
sau retine timpul cumulat cand senzorul este oprit in timpul lucrului. De exemplu, dorim sa stim cat timp un senzor este pornit pe timpul unei ore. Daca folosim unul din temporizatoarele de mai sus acestea se vor reseta de fiecare data cand senzorul se opreste/porneste. Acest temporizator insa, ne va da un timp cumulat total.
Pentru a sti cum sa utilizam temporizatoarele trebuie sa cunoastem doua lucruri:
Ø ce va porni temporizatorul (de obicei este una din intrari)?
Ø cat timp vom sta pana sa reactionam (sa stam 5s inainte de a porni un solenoid)?
Cand intructiunile dinainte de simbolul temporizatorului sunt adevarate, temporizatorul incepe sa functioneze. Cand timpul se acumuleaza temporizatorul isi inchide contactele. Cand programul ruleaza in automatul programabil, acesta de obicei afiseaza timpul acumulat pentru ca noi sa vedem valoarea curenta. In mod normal temporizatoarele pot "ticai" de la 0 la 9999.
Fiecare tact este echivalent cu x secunde.
De obicei fiecare fabricant ofera mai multe tipuri de tacturi. Majoritatea fabricantilor ofera incrementari de 10 si 100ms (tacturi de ceas). Cativa fabricanti ofera de asemenea incrementari de 1 ms ca si de o secunda. Aceste temporizatoare cu incrementare diferita functioneaza ca cele de mai sus dar cateodata au nume diferite pentru a descrie baza lor de timp. Unele sunt temporizatoare de mare viteza, altele de foarte mare viteza sau temporizatoare rapide cu acumulare.
Acest temporizator este de tipul "on delay" si este numit Txxx. Cand intrarea este pornita, temporizatorul incepe sa ticaie. Cand a ticait de yyyyy (valoarea presetata) ori, va porni contactele sale pe care le folosim mai tarziu in program.
Mai jos este simbolul aratat intr-o diagrama scara:
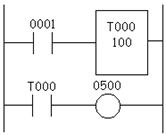
In aceasta diagrama asteptam intrarea 0001 sa fie pornita. Cand este pornita, temporizatorul T000 (un temporizator de 100ms) incepe sa ticaie. Va ticai de 100 de ori. Fiecare tact (incrementare) este de 100ms astfel incat temporizarea va fi de 10000ms (10 secunde). 100 de tacturi x 100ms = 10000ms. Cand 10 secunde au trecut, contactele T000 se inchid si 500 este pornit. Cand intrarea 0001 se opreste (fals) temporizatorul T000 va fi resetat la 0 cauzand deschiderea contactelor sale (fals) deci pricinuind inchiderea iesirii 500.
Un temporizator cu acumulare va arata similar cu acesta:
Acest temporizator este numit Txxx. Cand intrarea de activare este in functiune temporizatorul incepe sa ticaie. Cand ticaie de yyyyy ori (valoarea presetata), va inchide contactele sale pe care le vom folosi mai tarziu in program. Daca totusi, intrarea de activare se opreste inainte ca temporizarea sa se termine, valoarea curenta va fi retiunuta. Cand intrarea este din nou pornita, temporizatorul va continua de unde a ramas. Singura cale ca sa fortam temporizatorul inapoi la valoarea sa presetata este sa pornim intrarea de resetare.
Simbolul este aratat in diagrama scara de mai jos.
In aceasta diagrama asteptam ca intrarea 0002 sa fie pornita. Cand acest lucru se intampla temporizatorul T000 (un temporizator cu incrementare de 10ms) incepe
sa ticaie. Va ticai de 100 de ori. Fiecare tact (increment) este de 10ms astfel incat temporizarea va fi de 1000ms (o secunda). 100 tacturi x 10ms = 1000ms. Cand o secunda a trecut, contactele T000 se inchid si 500 este pornit. Daca intrarea 0002 este oprita timpul scurs va fi retinut. Cand 0002 este din nou pusa in functiune temporizatorul va continua de unde a ramas. Cand intrarea 0001 va fi pornita (adevarata) temporizatorul T000 va fi resetata inapoi la 0 cauzand deschiderea contactelor sale (fals) rezultand oprirea iesirii 500.
Un lucru important de retinut este ca numaratoarele si temporizatoarele nu pot avea acelasi nume (in majoritatea automatelor programabile). Aceasta pentru ca ele de obicei folosesc aceleasi registre.
Intotdeauna amintiti-va ca, desi simbolurile pot arata diferit ele actioneaza in acelasi fel. De obicei diferenta majora se afla in durata tacturilor de incrementare.
In general, exista doua tipuri de erori cand utilizam un temporizator. Primul tip este eroarea de intrare. Celalalt este eroarea de iesire. Eroarea totala este suma ambelor erori.
Eroarea de intrare - O eroare apare depinzand de momentul din ciclul de scanare in care intrarea temporizatorului este pornita. Cand intrarea este pornita imediat dupa ce automatul programabil verifica starea intrarilor in timpul ciclului de scanare, eroarea de intrare va fi cea mai mare (mai mult de un timp de scanare). Aceasta deoarece, dupa cum va veti aminti, intrarile sunt verificate o singura data in timpul unei scanari. Daca n-a fost pornita cand automatul se uita la intrari ci este pornita mai tarziu avem evident o eroare. Mai departe trebuie sa asteptam pana cand instructiunea de temporizare este executata in timpul partii de rulare a programului din scanare. Daca intructiunea de temporizare este ultima instructiune de pe treapta poate fi o eroare destul de mare?
Eroarea de iesire - O alta eroare apare depinzand locul pe scara in care temporizatorul "expira" si cand automatul termina de executat programul ca sa ajunga la partea din ciclu in care reface intrarile. Aceasta pentru ca temporizarea
se termina in timpul executiei programului dar automatul trebuie sa termine de executat restul programului inainte de a porni iesirea care trebuie activata.
4.5 Operatiile automatelor programabile
Aceste operatii de baza includ in mod obisnuit functiile AND (SI), OR(SAU) si XOR (Sau exclusiv). Fiecare este descrisa mai jos.
AND- Aceasta functie ne lasa sa folosim tabela de adevar de mai jos. Aici putem vedea ca functia AND este inrudita cu inmultirea. Vedem aceasta pentru ca singura data cand rezultatul este adevarat (1) este atunci cand ambii operatori A si B sunt adevarati (=1).
Instructiunea AND este folositoare atunci cand automatul vorstru nu are o functie de mascare. O functie de mascare da voie unui bit intr-un registru sa fie "lasat in pace" cand lucram la nivel de bit. Aceasta pentru ca fiecare bit care este AND-at cu sine insusi va ramane la valoarea care o are initial.
Observati tabela de adevar de mai jos pentru a intelege aceasta (1 AND 1 = 1, 0 AND 0 = 0)
|
Rezultat = A AND B |
||
|
A |
B |
Rezultat |
|
0 |
0 |
0 |
|
1 |
0 |
0 |
|
0 |
1 |
0 |
|
1 |
1 |
1 |
OR- Aceasta functie se bazeaza pe tabela de adevar de mai jos. Aici putem vedea ca functia OR este foarte mult inrudita cu adunarea. Vedem aceasta pentru ca singura data cand rezultatul este adevarat (=1) este cand operatorul A sau B este adevarat (=1). Evident, cand sunt ambii adevarati rezultatul este adevarat.
|
Rezultat = A OR B |
||
|
A |
B |
Rezultat |
|
0 |
0 |
0 |
|
1 |
0 |
1 |
|
0 |
1 |
1 |
|
1 |
1 |
1 |
XOR- Aceasta functie ne lasa sa folosim tabela de adevar de mai jos. Astfel putem vedea ca functia XOR nu este inrudita cu nici o operatie matematica uzuala. O modalitate usoara de a retine rezultatele acestei functii este sa ne gandim ca A si B trebuie sa fie inversa celeilalte. Daca sunt ambele la fel (A=B) atunci rezultatul este fals (=0).
Aceasta este cateodata folositor cand dorim sa comparam bitii din 2 registre si sa subliniem ce biti sunt diferiti. Mai este necesar atunci cand calculam diferite sume de control. O suma de control este de obicei folosita ca o verificare de erori in protocoalele de transmisiuni
|
Rezultat = A XOR B |
||
|
A |
B |
Rezultat |
Multe sisteme de numeratie sunt folosite de automatul programabil. Binar si Zecimalul Codat Binar sunt populare in timp ce sistemele octale si hexazecimale sunt de asemenea comune.
Sa consideram urmatoarea formula:
Nbase= Ddigit * Runit + . D1R1 + D0R0
unde D=valoarea digitului si R= numarul de simboluri digitale folosite in sistemul de numeratie dat.
Zecimal- Acesta este sistemul de numeratie pe care il folosim in viata de zi cu zi. Ne putem gandi la acesta ca fiind numeratia in baza 10. Mai poate fi numit baza10 pentru ca fiecare digit poate avea 10 stari diferite (0-9). Din moment ce acesta nu este usor de implementat intr-un sistem electronic, este extrem de rar folosit.
Binar- Acesta este sistemul de numeratie pe care calculatoarele si automatele programabile il folosesc. A fost mult mai usor de realizat un sistem in care doar 2 numere (0 si 1) sunt manipulate (folosite). Sistemul binar foloseste acelasi principiu de baza ca si cel zecimal. In zecimal avem 10 digiti (0-9).
In binar avem doar 2 digiti (0 si 1). In zecimal numaram: 0,1,2,3,4,5,6,7,8,9 si in loc sa ne intoarcem inapoi la zero, pornim un nou digit si apoi plecam de la 0 in locatia originala a digitului
Formula de conversie generala :
Nbase= Ddigit * Runit + . D1R1 + D0R0
Iata un simplu tabel de binare pentru referinta. Randul de sus arata puterile lui 2 pe cand randul de jos arata valoarea zecimala echivalenta.
|
Conversiile numerelor binare |
|||||||||||||||
Octal- Sistemul de numeratie binar cere o multitudine de digiti pentru a reprezenta un numar mare. Luati in considerare numarul binar 11111111 este doar zecimalul 257. Un numar zecimal ca 1000000 ar necesita o multitudine de digiti binari! In plus este de asemenea dificil pentru oameni sa manipuleze asemenea numere fara sa faca greseli. De aceea cativa producatori de calculatoare/automate programabile au inceput sa implementeze sistemul de numeratie octal.
Acest sistem poate fi gandit ca baza 8 din moment ce consista din 8 digiti.
Folosind formula din nou, putem converti un numar octal intr-un numar zecimal destul de usor.
Nbase= Ddigit * Runit + . D1R1 + D0R0
Iata un simplu tabel de octale pentru referinta. Randul de sus arata puterile lui 8 pe cand randul de jos arata valoarea zecimala echivalenta.
|
Conversiile numerelor octale |
|||||||
Sistemul octal este o cale convenabila pentru noi de a exprima sau scrie numere binare in sistemele de automatele programabile. Un numar binar cu un mare numar de digiti poate fi in mod convenabil scris intr-o forma octala cu mai putini digiti. Aceasta pentru ca un digit octal reprezinta de fapt 3 digiti binari.
Tabelul urmator arata ceea ce doream sa spunem:
|
Numar binar cu echivalentul sau octal |
|||||||||||||||
Hexazecimalul este cea mai buna metoda de gandire.
Hexazecimal- Sistemul de numeratie binar cere o multitudine de digiti pentru a reprezenta un numar mare. Sistemul octal aduce imbunatatiri. Sistemul hexazecimal este insa cea mai buna solutie, pentru ca ne permite sa folosim si mai putini digiti.
De aceea este cel mai popular sistem de numeratie utilizat in calculatoare si in automatele programabile. Sistemul hexazecimal mai este cunoscut ca baza 16 sau simplu hex. Cum spune si numele, are 16 digiti. Digitii sunt: 0,1,2,3,4,5,6,7,8,9,A,B,C,D,E,F.
Folosind formula din nou, putem converti un numar hexa in zecimal destul deusor.
Nbase= Ddigit * Runit + . D1R1 + D0R0
Iata un simplu tabel de hexazecimale pentru referinta. Randul de sus arata puterile lui 16 pe cand randul de jos arata valoarea zecimala echivalenta.
|
Conversiile numerelor hexa |
||||||||
In final, sistemul hexa este poate cea mai convenabila cale pentru noi sa exprimam sau sa scriem numerele binare in sistemele de automate programabile. Un numar binar cu un mare numar de digiti poate fi scris convenabil in forma hexa cu mai putini digiti decat in forma
Tabelul urmator arata ceea ce doream sa spunem:
|
Numar binar cu echivalentul sau Hexa |
|||||||||||||||
|
A | |||||||||||||||
Din tabel putem vedea ca numarul binar 0111010010100101 este 74A5 in hexa (29861 in zecimal). Cum putem vedea, cand ne gandim la registre, este mai usor sa gandim in hexa decat in binar sau in octal.
4.6 Automate programabile TSX 07
4.6.1 Prezentare automate programabile
Automatele TSX 37-08 au 2 module de intrare/ iesire a cate 28 de pini fiecare (16 intrari si 12 iesiri) localizate in primele doua sloturi si avand doua jumatati de slot diponibile.
Prezinta doar o singura configuratie pentru alimentare si curent alternativ si nu administreaza intrarile/iesirile la distanta pe un nano-PLC sau pe bus-ul AS-I.Sloturile disponibile pot fi echipate cu module de format standard sau cu doua jumjati de module.
4.6.2 Descrierea automatelor programabile
Cuprinde urmatoarele elemente :
Trei sloturi in care sunt incorporate alimentarea, procesorul si memoria.
Blocul de vizualizare centralizat.
Portul terminal TER.
Butonul de RESET.
Trapa de acces la bornele de alimentare.
Trapa de acces la bateria optionala si la comutatorul de protectie si scriere a sistemului de operare.
28 module I/O pozitionate in primele doua sloturi.
Caracteristici :
Ø tensiunea de alimentare : 110V.240V in c.a. Si 24V in c.c.
Ø modulele de I/O : I - 24V in c.c. si 115V in c.a.
O - 24V in c.c.
Sintaxa pentru modulele de I/Q este urmatoarea :
'%' - simbol ;
I or Q - intrare sau iesire ;
Pozitia x=1 la 6 ;
'i' - canal .
Canale de adresare pentru TSX 37-08 :
Formatul standard pentru modulul cu 28 I/Q :
-numarul canalului : vechea pozitie 0 la 15 ;
noua pozitie o la 11 ;
-adresa canalului : vechea pozitie %Ix.0 la Ix.15 ;
noua pozitie %Q(x+1).0 la Q(x+1).11.
Regim de lucru :
temperatura de functionare : 0..+60C (fara unitate de ventilatie) ;
umiditatea relativa : 10..95% (fara condensare)
inaltime : 0.2000m ;
temperatura de stocare : -25 +70C :
Alimentarea la reteaua electrica :
Q - izolator general ;
Fu1 - siguranta de 1A ;
KM - contactor ;
Fu2 - siguranta de 0.5A, standard.
CAPITOLUL 5
Prezentarea limbajului de programare PL7 - NANO
5.1 Generalitati
Limbajul de programare Pl7-micro se desfasoara in jurul a patru parti principale de aplicatie: variabile, configurari, programe si documentatie.
Aceste servicii sunt realizate de un editor direct incepand cu ecranul de baza pana la icoane si bara de stare. Fereastra contine editoare care pot fi vizualizate simultan in acelasi ecran ( ex: posibilitatea de programare si definirea simultana a simbolurilor in editorul de variabile.
Editorul de variabile permite:
Ø Simbolizarea diferitelor obiecte ale aplicatiei: biti, cuvinte, blocuri functionale, I/Q;
Ø Simbolizarea parametrilor blocurilor functionale: temporizatoare, comparatoare, registrii;
Ø Posibilitatea de a alege baza de afisare a valorilor constantelor: zecimal, binar, hexazecimal.
Accesarea variabilelor este facilitata de :
Ø Calsificare dupa familie si tipul acestora.
Ø Posibilitatea de afisare a tuturor obiectelor asociate unei aceleiasi variabile (ex: toti bitii unui cuvant, toate obiectele asociate unui bloc functional predefinit ).
Editorul de configurare permite un mod intuitiv si grafic de declarare si configurare a diferitelor elemente care constituie configurarea automatelor.
Exista doua tipuri de configurare:
Ø Configurare hard;
Ø Configurare soft.
Configurarea hard:
Ø Procesoare;
Ø Module de I/Q;
Ø Memorie.
Configurare soft:
Editorul de configurare asigura de asemenea parametrii logici ai aplicatiei, alegerea numarului de constante, bitii si cuvintele interne, blocurile functionale dupa tip (temporizatoare, comparatoare), si obiectele Grafcet.
Editorul de programe: limbajul de contacte.
Ofera numeroase utilitati care asigura constructia usoara a unei retele de contacte:
Ø O paleta de elemente grafice permit accesul direct cu ajutorul mouse-ului sau a tastaturii la diferite simboluri grafice a limbajului de contacte, bobine, blocuri functionale, blocuri functionale predefinite.
Ø Desenarea unei retele poate fi realizata fara a avea informatii asupra elementului.
Ø Obiectele limbajului pot fi vazute sub forma de simboluri, repere sau amandoua odata.
Ø Construirea unei retele de contacte se face simplu prin selectionarea simbolurilor din paleta grafica si prin plasarea in locul dorit in grila prezentata pe ecran.
Editorul de programe : limbajul lista de instructiuni permite introducerea de la tastatura a instructiunilor si operatii ale limbajului. Punerea in forma (alinierea instructiunilor si operanzilor) este realizata automat de editor.
Editorul ofera posibilitatea de a avea acces la:
Ø Instructiunea pentru blocuri functionale (%Tmi; %Ci)
Ø La functii prin intermediul bibliotecii de functii.
Editorul de programe: limbajul Grafcet.
Ofera numeroase posibilitati de realizare grafica:
Ø O paleta de obiecte grafice accesibile direct de la tastatura sau cu ajutorul mouse-ului.
Ø O numerotare automata a etapelor.
Ø Un afisaj pentru pagina grafica cu linii pentru etape si tranzitii.
Ø Un loc pentru comentarii.

Construirea unui grafic se face simplu selectand obiectele dorite din paleta grafica dupa care le asezam in pagina Grafcet. Vizualizarea imediata a obiectelor grafice programate este asigurata prin evolutia lor grafica (etapa fina).
Editorul Grafcet se comporta ca o zona de editare care se deplaseaza pe un modul complet de maxim 8 pagini Grafcet.
Editorul documentatie permite imprimarea totala sau pe jumatate a dosarului aplicatie si utilizeaza tehnologia 'True Type'. Formatul suportat este A4 sau orientare 'portrait'.
Editorul permite definirea:
Ø Unei pagini de garda completata cu numele proiectantului si a proiectului.
Ø Unei pagini cu informatii generale.
Ø Un cartus.
Editorul documentatie genereaza in mod automat: un rezumat, un dosar aplicatie ce contine configurarea hard/soft, lista de variabile.
Elemente grafice de baza:
Ø Elemente de test;
Ø Elemente de legatura;
Ø Elemente de actionare;
Ø Elemente de salt;
Ø Elemente de apelare;
Ø Blocuri functionale;
Ø Blocuri de comparare;
Ø Bloc operational.
Elemente de test
|
Contact de inchidere |
|
Contact realizat cand obiectul bit care il conduce este in starea 1 |
|
|
Contact de deschidere |
|
Contact realizat cand obiectul bit care il conduce este in starea 0 |
|
|
Contact detectare schimbare a starii |
N |
Front crescator: detecteaza trecerea din 0 in 1 a bitului obiect.
Front descrescator: detecteaza trecerea din 1 in 0 a bitului obiect.
Elemente de legatura
|
Conexiuni orizontale |
|
Permite legarea in serie a elementelor grafice de test si de actionare intre doua bare de potential. |
|
Conexiuni verticale |
*
|
F7: permite legarea in paralel a elementelor grafice de test si de actionare. F8: permite realizarea unei conexiuni verticale. F9: permite legarea elementelor de test direct de elementele de actionare |
Elemente de actionare.
|
Bobina directa |
|
Bitul obiect asociat ia valoarea rezultatului logic al zonei de test. |
||
|
Bobina inversa |
|
Bitul obiect asociat ia valoarea inversa a rezultatului logic al zonei de test. |
||
|
Bobina de aclansare |
S |
Bitul obiect asociat trece in starea 1 si pastreaza aceasta stare in timp ce rezultatul zonei de test este 1. Este trecut in 0 de catre bobina de declansare |
||
|
Bobina de declansare |
R |
Bitul obiect asociat trece in starea 0 si pastreaza aceasta stare in timp ce rezultatul zonei de test este 1. Este trecut in 1 de catre bobina de aclansare. |
||
|
Bobina de receptivitate Grafcet |
|
Simbolizeaza trecerea de la o etapa la alta si apare in mod automat o data cu sesizarea unei receptivitati. |
Elemente de salt.
|
Salt catre o alta retea |
%Li - - - > > |
Permite bransamentul la eticheta unei retele, amonte sau aval. Semnul '?' precede eticheta %li atunci cand acela nu a fost in prealabil definit. |
Elemente de apelare.
|
Bobina de apelare (Call) |
C |
Permite bransamentul la inceputul programului. Executia unui apel cu ajutorul programului provoaca : Oprirea scrutarii retelei intrerupte; Executia cu ajutorul programului; Reluarea cercetarii retelei intrerupte |
||
|
Repetarea subprogramului < return> |
<Return> |
Permite repetarea modulului asteptat. |
||
|
Oprirea programului Halt |
< HALT> |
Acest element provoaca oprirea executiei programului. |
Blocuri functionale
|
Temporizator Comparator Registrii Programator |
|
Fiecare din blocurile functionale predefinite utilizeaza intrari si iesiri permitand legarea lor la alte elemente. |
Blocuri de comparare.
|
Bloc comparator vertical |
|
Permite comparatia a doi operanzi si umarind rezultatul , iesirea corespunzatoare trece la 1. |
|
Bloc comparator orizontal |
|
Permite comparatia a 2 operanzi. Iesirea trece in 1 pana cand este verificat rezultatul. |
|
Bloc operational |
|
Realizeaza operatii aritmetice, logice facand apel la limbajul literar structurat. |
Un program construit in limbaj de contacte (LD) se compune dintr-o suita de retele (numite Rung) executate secvential de automat. Desenata intre doua bare de potential , o retea este un ansamblu grafic reprezentat astfel:
Ø I/Q ale automatului (butoane, detectoare);
Ø Functii ale automatului (temporizari, comparari);
Ø Operatii aritmetice-logice si operatii de transfer;
Ø Variabile interne ale automatului.
Aceste elemente grafice sunt realizate intre conexiuni orizontale sau verticale. Toate elementele grafice sunt continute in paleta cu elemente grafice.
Fiecare retea in sine constituie: o eticheta (facultativ), un comentariu. 7 linii si 11 coloane (maxim). Construirea unei retele de contacte se efectueaza plecand de la paleta de elemente grafice.
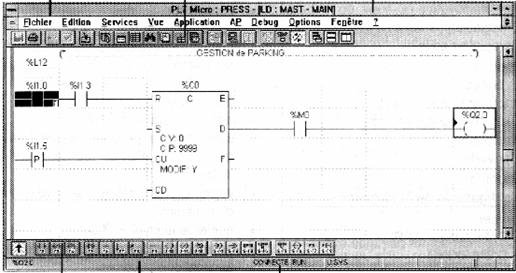
5.2.1 Construirea unei retele de contacte.
O eticheta permite gasirea unei retele de contacte in modulul de program. Sintaxa este urmatoarea " %Li" cu 0< I > 999. Eticheta se afla la inceputul fiecarei retele de contacte. O eticheta nu se poate afla de mai multe ori in acelasi program. Eticheta trebuie sa permita un bransament dupa un salt de program.
Poate fi introdusa astfel:
Ø De la mouse:dublu clic pe zona unde vrem sa scriem si tastam Enter pentru validare;
Ø De la tastatura: se pozitioneaza cursorul pe zona etichetata apasand tasta Space, numim eticheta ( de la 0 la 999) si apasam tasta Enter pentru validare.
Comentariul poate fi introdus la inceputul retelei si poate ocupa maxim trei linii (222 de caractere) incadrate intre ghilimele. Elementele grafice pot fi introduse si ele de la tastatura sau cu ajutorul mouse-ului.
Modificarea unei retele de contacte.
modificarea unei variabile.
Ø Se pozitioneaza cursorul pe variabila pe care vrem sa o modificam cu ajutorul tastei Space sau dublu clic cu mouse-ul. Validarea se face prin apasarea tastei Enter.
modificarea unei retele.
Ø De la tastatura se pozitioneaza pe celula ce contine elementul de modificat selectionand elementul grafic in paleta grafica cu tastele F2 si F12 sau de la SHIFT+F1 la F8.
Ø Cu mouse-ul selectionam elementul grafic din paleta grafica si facem clic pe elementul desenat. Se pozitioneaza cursorul pe elementul ce vrem sa-l modificam.
BIBLIOGRAFIE
Cornel Cobianu, Gheorghe Cimpoaca, Alexandru Ivan,
Senzori si traductoare, Editura Printech, 2001
Paul Manolescu, Carmen Ionescu-Golovanov,
Masurari electrice si electronice, EDP, Bucuresti, 1979
www.electronica-azi.ro
www.intelicasa.ro
www.labview.com
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3200
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved