| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
ACTIONAREA ELECTRICA
A ROBOTILOR INDUSTRIALI
Beneficiile introducerii robotilor in industrie includ managementul controlului si al productivitatii si cresterea evidenta a calitatii produselor. Robotii pot lucra zi si noapte fara a obosi sau a-si reduce performanta. Consecvent realizeaza reduceri substantiale ale pretului de cost in primul rand prin reducerea consumurilor de materii prime si al prelucrarii automate a acestora. De asemenea utilizarea robotilor aduce avantaje pe piata concurentiala. Prin dezvoltarea rapida a industriei si a tehnicii de calcul, putem observa evolutia robotilor industriali catre generatiile inteligente ce le ofera caracteristica de a 'intelege' mediul in care lucreaza.
Robotii ofera beneficii substantiale muncitorilor, industriilor si implicit tarilor. In situatia folosirii in scopuri pasnice, robotii industriali pot influenta pozitiv calitatea vietii oamenilor prin inlocuirea acestora in spatii: periculoase, cu conditii de mediu daunatoare omului, cu conditii necunoscute de exploatare etc.
Este adevarat ca robotii industriali prin calitatile lor pot cauza reduceri masive de personal acolo unde sunt implementati, dar creeaza si meserii alternative:
Sistemele de actionare electrice au ponderea cea mai mare in cadrul actionarilor robotilor industriali, datorita avantajelor pe care le ofera:
alimentarea simpla cu energie electrica de la retea sau autonimia totala, prin echiparea cu baterii de acumulatoare;
compatibilitatea cu sistemul de comanda si sistemul senzorial;
posibilitatea de reglare a vitezei in limite largi;
precizia de pozitionare ridicata.
Lucrarea "ACTIONAREA ELECTRICA A ROBOTILOR INDUSTRIALI" este structurata in trei capitole:
Cap. 1. Notiuni introductive
Cap. 2. Sisteme de actionare a robotilor industriali
Cap.3. Sisteme de actionare electrica a robotilor industriali
In capitolul 1 sunt prezentate notiuni generale despre robotii industriali: aparitia, evolutia lor, structura acestora. Functiile de baza sunt reprezentate de:
In capitolul al doilea sunt enumerate particularitatile sistemelor de actionare a robotilor industriali. Printre acestea pot fi enumerate:
Alegerea sistemului de actionare se face in principal in functie de:
mediul de lucru,
viteza si distanta de deplasare,
precizia de pozitionare
capacitatea de manipulare .
Actionarea robotilor se realizeaza cu sisteme:
v electrice (87%),
v hidraulice (10%),
v pneumatice (2%)
v alte sisteme de actionare (1%).
In capitolul al treilea sunt prezentate pe scurt toate tipurile de sisteme electrice de actionare utilizate: cu motoare de curent continuu, cu motoare pas cu pas, cu motoare cu inductie, cu motoare sincrone, cu microactionari electrostatice si electromagnetice.
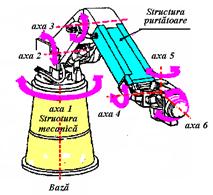
Amplasarea actionarilor robotilor industriali se face la nivelul articulatiei sau exteriorul acesteia.
Amplasarea actionarii la nivelul articulatiei presupune solidarizarea componentelor motoarelor de actionare (inductorul si indusul in cazul motorului electric, respectiv cilindrul si pistonul in cazul motorului hidraulic sau pneumatic de elementele cuplei cinematice.
Amplasarea in articulatie a motoarelor de actionare are avantajul unei structuri mecanice compacte si robuste si a unor transmisii scurte, dar in schimb creste momentul de inertie, avand implicatii asupra comportarii dinamice si gabaritului.
Amplasarea actionarii in exteriorul articulatiei presupune dispunerea in exteriorul articulatiei a motorului de actionare si transmiterea miscarii catre cupla cinematica prin diferite sisteme de transmisii (cablu, curea, lant).
Omul si-a imaginat dispozitive mecanizate inteligente care sa preia o parte insemnata din efortul fizic depus. Astfel a construit jucarii automate si mecanisme inteligente sau si-a imaginat robotii in desene, carti, filme 'SF' etc.
Unul din obiectivele esentiale ale roboticii este elaborarea robotilor autonomi. Asemenea roboti ar putea accepta o descriere naturala - formala - (de nivel inalt) a sarcinilor de indeplinit si executarea comenzilor fara alte interventii umane. Descrierile necesare vor preciza ce doreste utilizatorul si nu cum sa execute comenzile. Robotii capabili sa indeplineasca aceste operatii vor fi dispozitive mecanice versatile, echipate cu senzori de perceperea a mediului si aflate sub controlul unui sistem de calcul.
Orientarea intr-un mediu total necunoscut, folosind senzori pentru detectarea obstacolelor si comunicatia cu un calculator aflat la distanta sunt doua aspecte importante care trebuie luate in considerare atunci cand lucram cu un robot mobil.
Fara senzori, robotii nu ar putea executa altceva decat sarcini fixate dinainte, repetand operatiile ce le are de realizat iar si iar, dar dotati cu senzori, robotii au capacitatea de a face mult mai mult decat atat.
Problemele specifice ce apar la robotii mobili sunt urmatoarele:
evitarea impactului cu obiectele stationare sau in miscare;
determinarea pozitiei si orientarii robotului pe teren;
planificarea unei traiectorii optime de miscare.
n cazul unui sistem robotic automat distribuit pozitiile spatiale sunt de o extrema importanta si de ele depinde indeplinirea scopurilor dorite si functionarea intregului sistem. Cu alte cuvinte, robotul trebuie sa fie capabil sa-si planifice miscarile, sa decida automat ce miscari sa execute pentru a indeplini o sarcina, in functie de aranjamentul momentan al obiectelor din spatiul de lucru.
Planificarea miscarilor nu consta dintr-o problema unica si bine determinata, ci dintr-un ansamblu de probleme dintre care unele sunt mai mult sau mai putin variante ale celorlalte.
Evitarea coliziunii cu obstacole fixe sau mobile (de exemplu alti roboti mobili) aflate in spatiul de lucru al robotului se poate face prin mai multe metode: realizarea unei aparatori mecanice care prin deformare opreste robotul, folosirea senzorilor care masoara distanta pana la obstacolele de pe directia de deplasare, folosirea senzorilor de proximitate, folosirea informatiilor corelate de la mai multe tipuri de senzori.
Localizarea obiectelor se poate realiza si prin contact fizic, dar acesta impune restrictii asupra vitezei de miscare a structurii manipulate. Contactul fizic dintre robot si obiectele din mediu genereaza forte de reactiune care modifica starea robotului. Vitezele mari de lucru fac ca efectele dinamice ale unui contact fizic cu obstacole sau obiecte manipulate sa fie riscante (pot duce la deteriorarea obiectelor sau a robotului).
Sistemul senzorial mai este numit si sistem de masurare. El asigura masurarea unor marimi fizice si eventual perceperea unor modificari semnificative a acestor marimi.


Termenul 'robot' a fost folosit in 1920 de cehul Karel Capek intr-o piesa numita 'Robotul universal al lui Kossum'. Ideea era simpla: omul face robotul dupa care robotul ucide omul. Multe filme au continuat sa arate ca robotii sunt masinarii daunatoare si distrugatoare.
Dupa 1977 tendinta multor producatori a fost de a umaniza forma robotilor si de a crea androizii.
In 1941 Isaac Asimov a folosit cuvantul 'robotizare' pentru descrierea tehnologiei robotilor si a prezis cresterea unei industrii robotice puternice. In 1956 a luat fiinta prima companie ce realiza roboti industriali, iar in 1961 Compania de automobile 'Genral Motors' 'angaja' primul robot industrial. Incepand cu 1980 asistam la o expansiune a robotilor industriali in diverse industrii.
Robotii ofera beneficii substantiale muncitorilor, industriilor si implicit tarilor. In situatia folosirii in scopuri pasnice, robotii industriali pot influenta pozitiv calitatea vietii oamenilor prin inlocuirea acestora in spatii: periculoase, cu conditii de mediu daunatoare omului, cu conditii necunoscute de exploatare etc.
Este adevarat ca robotii industriali prin calitatile lor pot cauza reduceri masive de personal acolo unde sunt implementati, dar creeaza si meserii alternative:
Beneficiile introducerii robotilor in industrie includ managementul controlului si al productivitatii si cresterea evidenta a calitatii produselor. Robotii pot lucra zi si noapte fara a obosi sau a-si reduce performanta. Consecvent realizeaza reduceri substantiale ale pretului de cost in primul rand prin reducerea consumurilor de materii prime si al prelucrarii automate a acestora. De asemenea utilizarea robotilor aduce avantaje pe piata concurentiala. Prin dezvoltarea rapida a industriei si a tehnicii de calcul, putem observa evolutia robotilor industriali catre generatiile inteligente ce le ofera caracteristica de a 'intelege' mediul in care lucreaza.
Structura generala a robotilor industriali depinde foarte mult de utilitatea si scopul pentru care sunt produsi. Functiile de baza sunt reprezentate de:
 Cap.
2. Sisteme de actionare a robotilor industriali
Cap.
2. Sisteme de actionare a robotilor industriali Sistemele de actionare a robotilor au urmatoarele particularitati:
SISTEMUL DE COMANDA coordoneaza miscarile axelor motoare in spatiul coordonatelor generalizate pentru indeplinirea sarcinii de deplasarea dispozitivului de presiune cu obiectul de manipulat intre pozitia initiala (g+ _)si pozitia finala (gfi):
g(t) = gi + r(t)(gf-gi), unde: r(t) reprezinta functia de interpolare cu valori la capete: r(0)=0 si r(t)=1
Alegerea sistemului de actionare se face in principal in functie de:
mediul de lucru,
viteza si distanta de deplasare,
precizia de pozitionare
capacitatea de manipulare .
Actionarea robotilor se realizeaza cu sisteme:
v electrice (87%),
v hidraulice (10%),
v pneumatice (2%)
v alte sisteme de actionare (1%).
In medii cu pericol de explozie, cum este cazul celulelor flexibile de vopsire, se alege actionarea pneumatica avandu-se in vedere si precizia de pozitionare mai redusa.
Pentru deplasarea unor sarcini mari pe distante scurte se prefera actionarea hidraulica.
Pentru deplasarea unor sarcini mici si mijlocii pe distante lungi se prefera actionarea electronica.
Intre sistemul de actionare si celelalte sisteme componente ale robotilor exista o interdependenta reciproca.
Structura mecanica conditioneaza alegerea SISTEMULUI DE ACTIONARE si reciproc, SISTEMUL DE ACTIONARE conditioneaza alegerea schemei cinematice.
Motoarele de actionare ale robotilor trebuie sa aiba moment de iritare redus pentru facilitarea pozitionarii, sa dezvolte cuplu ridicat la gabarit redus, sa fie insensibile la perturbatii si sa fie compatibile cu sistemul de comanda. Pentru fiecare grad de libertate se aleg motoare cu functionare reversibila si de scurta durata, luandu-se in considerare influentele reciproce datorita caracteristicilor initiale si sarcinii.
Actionarea cuplelor cinematice se face fie direct prin dispunerea motorului in axa articulatiei, fie prin intermediul organelor de transmisie.
Ponderea actionarii electrice se datoreaza urmatoarelor avantaje :
alimentarea simpla cu energie electrica de la retea sau autonimia totala, prin echiparea cu baterii de acumulatoare;
compatibilitatea cu sistemul de comanda si sistemul senzorial;
posibilitatea de reglare a vitezei in limite largi;
precizia de pozitionare ridicata.
Dintre dezavantajele actionarii electrice mentionam:
utilizarea organelor de transmisie pentru adaptarea parametrilor miscarii;
realizarea unui raport redus intre puterea dezvoltata si greutatea proprie.
Motoare de curent continuu cu rotor pahar si intrefier radial sunt alcatuite dintr-un inductor cu magneti permanenti fixati pe un jug cilindric si un rotor izolat, tip pahar,cu diametru redus pe care s-au imprimat prin metode serigrafice infasurarea indusului si colectorul.
Motoarele de curent continuu cu rotor disc si intrefier axial au un moment de inertie redus, obtinut prin dispunerea infasurarii rotorice si colectorului pe ambele fete ale unui disc izolat din circuit imprimat.
Actionarea robotilor cu motoare de curent continuu cu inertie mica, cu excitatie, cu magneti permanenti din pamanturi rare tip samarium-cobalt (So3CoO3), avand inductia remanenta de 0,85 (T) si energia specifica de 145 [KJ / m3], asigura o buna pozitionare si raspunsul prompt, datorita constantelor de timp.
Avantaje actionarii cu motoare pas cu pas:
conversia directa a impulsurilor de comanda in deplasari ale motorului;
compatibilitatea cu sisteme de comanda numerica;
reglarea simpla a vitezei prin frecventa de comanda a impulsurilor;
lipsa erorii cumulativa de pozitie;
timpul de raspuns redus.
Dezavantajele actionarii motoarelor pas cu pas:
cuplu motor redus, dependent de pozitia motorului;
limitari de viteza, functie de cuplu rezistent;
probleme de stabilitate in perioadele de accelerare si franare.
Motoarele pas cu pas rotative pot fi:hibride, cu magneti permanenti si cu reluctanta variabila.
Magnetul permanent sau dintele rotoric se deplaseaza cu pasul p si se orienteaza pe pozitia reluctantei si intrefierului minim.
Se construiesc motoare pas cu pas liniare cu reluctanta variabila.
Motorul de inductie cu intrefier plan axial este alcatuit dintr-un inductor toroidal si un circuit feromagnetic de inchidere a fluxului inductor, plasate pe ambele laturi ale unui indus-disc realizat din materialul nefromagnetic usor(Al).
Motorul de inductie cu dubla actiune are doua indusuri-disc plasate pe acelasi Ox sau pe axe diferite realizand un intrefier plan-axial.
Motorul de inductie cu intrefier radial cuprinde un inductor sub forma de coloana circulara cu crestaturi pe suprafata exterioara si un circuit magnetic de inchidere al fluxului, plasate pe ambele fete ale unui indus pahar .
Motorul de inductie cu dubla actiune cuprinde un inductor sub forma de coloana circulara cu crestauri pe suprafetele interioare si exterioare, dispuse pe fetele indusului tip dublu pahar.
Motoarele liniare cu un singur inductor se realizeaza in urmatoarele patru modele constructive:
1. Motorul liniar de inductie cu o suprafata activa este alcatuit dintr-un inductor scurt in miscare si un indus lung, feromagnetic sau de tip sandwich.
2. Motorul de inductie cu doua suprafete active este alcatuit dintr-un inductor scurt, prevazut cu crestaturi si bobine pe cele doua suprafete opuse active si doua indusuri placa AlFe, care reprezinta calea de rulare, ghidare si de mentinere constanta a intrefierului.
3. Motorul de inductie cu trei suprafete active este alcatuit dintr-un inductor scurt, cu doua suprafete active si indusul lung AlFe, la care suprafata feromagnetica constiuie circuit magnetic de inchidere a fluxului inductor.
4. Motorul de inductie cu patru suprafete active este format dintr-un inductor scurt paralelipipedic, cu crestaturi pe toate cele patru parti active si infasurari de tip inel si respectiv indusul lung tubular din AlFe cu sectiune patrata, care imbraca inductorul.
Din punct de vedere constructiv motoarele sincrone cu magneti permanenti din SmCo5 sau NdFeB sunt realizate cu intrefier radial sau cu intrefier oxial.
La motoare cu rotor cilindric magnetii permanenti se pot monta pe suprafata rotorului feromagnetic sau in interiorul acestuia.
La motoarele sincrome cu magneti permanenti montati pe suprafata feromagnetica a rotorului, saturatia magnetica este neglijabila si magnetul permanent poate fi considerat ca o sursa fictiva echivalenta cu curent constant proportional cu numarul de perechi de poli p, cu densitatea de flux a materialului magnetic, cu grosimea radiala si cu jumatatea deschiderii electrice unghiulare a magnetilor si invers proportioanl cu permeabilitatea materialului magnetic.
Actionarea microrobotilor se face cu micromasini electrice bazate pe tehnologii de pulverizare catodica, electrodepunere sau LIGA.
Micrometrele cu bobine plane spirale realizate prin pulverisarea catodica,permit deplasarea magnetului rotoric.
Micrometrele cu bobine 'meandre' au avantajul ca miezul feromagnetic obtinut prin depunere electrolitica multistrat rezolva problema interconexiunilor si reducerii lungimii conductorilor.
Micrometru hibrid cu magneti permanenti si intrefier oxial cuprinde un rotor disc cu magneti permanenti si bobine plane.
Micrometru hibrid cu magneti permanenti si intrefier radial este format dintr-un inductor cu magneti permanenti din samariu-cobalt si un indus cu bobine plane in doua straturi,realizat pe folie poliamidica prin tehnologii LIGA.
Din comparatia expresiilor fortelor motoarelor electromagnetice Fm=1/2yo∙B28/S si respectiv de motoarele electrostatice F3=E0/2∙ε2/S se constata ca egalitatea fortelor se obtine pentru:
E = (1/√0∙ε0)∙B8 = (1/√1,26∙10-6∙8,85∙10-12)∙1,6 = 6,108
[V/m] care corespunde pentru tensiunea de 60[v] la interstitiu de 0,1[m], iar pentru 1200[v] la 2[m] cea ce exemplifica necesitatea miniaturizarii.
Raportand energia inmagazinata in intrefierul motorului electromagnetic Wm=(1/2)∙(B82/0) la energia inmagazinata in interstitiul condensatorului We=(1/2)∙(ε0E2) pentru valori uzuale ale inductiei B3=1[T], intensitatii ale campului electric inductivitatii aerului.
Motorul electrostatic bazat pe atragerea electrolitilor intre armaturile unui condensator functioneaza prin interactiunea campului electric creat de statorul cu sase piese polare plasate pe suport electroizolat si alimentate succesiv de schema de comanda cu rotorul cu patru electroliti fixati cu piese izolate pe axul comun si comanda cu impulsuri prin generatorul Gi si distribuitorul Di.
Motorul electrostatatic bazat pe atragerea armaturii mobile de catre electretii plasati pe armatura fixa functioneaza prin interactiunea campului electric statoric creat de sase electroliti plasati pe sase armaturi, fixate pe cilindru electroizolat si alimentate succesiv de o schema de comanda cu generatorul Gi, distribuitorul Di si rotorului cu patru electreti plasati pe un ax comun si alimentati de o sursa de curent continuu prin intermediul unor contacte alunecatoare realizate cu inele si perii.
Functionarea motoarelor piezoelectrice se bazeaza pe efectul electrostrictiv al materialelor dielectrice polarizate (cuart, aliaje de Pb, oxizi de titan zirconiu, ceramici sintetizate BaTiO3, PbTiYrO3, sau polimeri tip politetrafloretena PVDF) de a dezvolta o forta F (de tranzactie sau compresie) sub actiunea unui camp electric.
Sub actiunea unei forte mecanice se realizeza o modificare a marimilor geometrice si o polarizare a dielectrului [16,27]
Deoarece campul electric aplicat E ≤ ECA este alternativ, pentru fiecare alternanta se produce o alungire Δl dipolilor in sensul campului, rezultand o bucla de histerezis in jurul unui punct de remanenta.
In functie de sensul campului electric aplicat se obtin dilatari si contractii.
Daca se asociaza doua sisteme de cristale piezoelectrice sub forma de tor, defazate de 900, si se alimenteaza cu tensiuni sinusoidale in cuadratura se obtine o unda progresiva. Daca coroanele sunt suprapuse, nodurile undei unei coroane coincid cu ventrele undei celeilalte coroane.
Un element piezoelectric, plasat intre doi electrozi cu diferenta de tensiune U, se deformeaza cu viteza v sub actiunea fortei F, respectiv [16]:
AU - ZV = F
sau:
YU + AV = I
unde: Z si Y sunt impedanta si admitanta.
In cazul unei excitatii continui in regim pemanent (v = 0) rezulta:
AV = F
Forta exercitata asupra elementului de rigiditate K antreneaza o deformatie x astfel ca rezulta relatia F = KX, similar ca la materialul elastic.
Daca se impune materialului o viteza de deformare v = 1 [m/s], in absenta alimentarii (U = 0) ecuatia devine:
AV = I
sau:
A(dx/dt) = I
Prin integrare in raport cu timpul rezulta AX = q, unde q este constanta de elasticitate. Ecutia A(dx/dt) = I devine [16]:
AV = KX = (k/A)∙q
In cazul unei excitatii electrice sinusoidale impuse, masa m a elementului cu sarcina nula rezulta din ecuatia:
m(d2x/dt2)+KX = F = AV
si pe baza ecuatiei AV = KX=(k/A)∙q rezulta:
(m/A2) (d2q/dt2) + (K/A2)∙q = F/A = v
Ecuatia este analoaga cu a unui sistem LC serie, ceea ce permite definirea inductantei echivalente Lm = m / A2 si a impedantei proprii Zm prin inserierea a doua elemente pasive. Pentru amplificarea deformatiei elementului excitam la frecventa de rezonanta f0, dependenta de caracteristicile mecanice ale elementului:
f0 = (1/2 )√ZmCm = (1/2)√K/m
Aceasta amplificare este limitata de pierderile interne la disiparea energiei in elementul care vibreaza.
Pierderile mecanice din masa vibranta se grupeaza in rezistenta interna echivalenta rm in serie cu Cm si Lm, care constituie impedanta mecanica.
Motoarele piezoelectrice se utilizeaza pentru deplasari liniare sau rotative si pentru pozitionare in medii sensibile la campuri magnetice parazite deoarece nu genereaza flux parazit.
Deoarece piezoelementul se poate dilata aproximativ (0,10,2) [%] pe o directie, miscarea care este obtinuta este de ordinul a cativa [nm/V].
Micromotorul ceramic multistrat, cu grosimea de 10200 [m] la o tensiune de 50300 [V], are electrolizii imprimati pe materia prima ceramica arsa prin aplicare metodei turnarii in banda (tape casting).
Resortul cilindrului cu simpla actiune permite reincarcarea volumelor dozate si deplasarea programata spre stanga.
Prin actionarea electromagnetului e1 al distribuitorului pneumatic se trece volumul de ulei al cilindrului 1 (V1=20V0) in cilindrul principal si se realizeaza deplasarea incrementala cu un pas x.
Cilindrul 2, cu volumul V2=21V0 efectueaza deplasarea cu 2 pasi, cilindrul 3, cu volumul V3=22V0, realizeaza deplasarea cu 4 pasi, cilindrul 4, cu volumul V4=23V0, permite deplasarea cu 8 pasi.
Atunci cand se doreste deplasarea cu un numar de 7 pasi=22+21+20 se actioneaza electromagnetii e1, e2 si e3.
Amplasarea actionarilor robotilor industriali se face la nivelul articulatiei sau exteriorul acesteia.
Amplasarea actionarii la nivelul articulatiei presupune solidarizarea componentelor motoarelor de actionare (inductorul si indusul in cazul motorului electric, respectiv cilindrul si pistonul in cazul motorului hidraulic sau pneumatic de elemntele cuplei cinematice.
Amplasarea in articulatie a motoarelor de actionare are avantajul unei structuri mecanice compacte si robuste si a unor transmisii scurte, dar in schimb creste momentul de inertie, avand implicatii asupra comportarii dinamice si gabaritului.
Amplasarea actionarii in exteriorul articulatiei presupune dispunerea in exteriorul articulatiei a motorului de actionare si transmiterea miscarii catre cupla cinematica prin diferite sisteme de transmisii (cablu, curea, lant).
Aceasta pozitionare are avantajul reducerii momentului de inertie in articulatie, ceea ce favorizeaza pozitionarea.
Ciobanu, Lucian - De la roboti la intreprinderea virtuala, Ed MATRIX, Bucuresti, 2006
Dick, Doina, s.c., Mecatronica, Manual pentru clasa a XII - a, Editura Economica-Preuniversitaria, Bucuresti, 2006
Internet - studii de caz https://telerobot.mech.uwa.edu.au/
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 5060
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved