| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Calculul traductoarelor capacitive si a
parametrilor schemei de masurare
Structura generala a unui traductor
Elementele componente sunt:
a) Elementul sensibil ES (detector, captor, senzor) este elementul specific pentru detectarea marimii fizice care intereseaza. El are capacitatea de a elimina sau reduce la minim influentele exercitate de alte marimi decat cea care se masoara si care actioneaza simultan asupra traductorului. Sub actiunea marimii de intrare are loc o modificare de stare a elementului sensibil care contine informatia necesara determinarii valorii acelei marimi. Modificarea presupune un consum energetic care poate fi luat:
din proces, in raport cu fenomenul fizic, cu puterea marimii de intrare, cu cota din aceasta care poate fi cedata fara a-i afecta valoarea;
de la o sursa auxiliara de energie, cand modificarea de stare are ca efect variatii ale unor parametrii de material, a caror evidentiere necesita o sursa auxiliara.
In oricare din situatii, informatia asupra modificarii de stare nu poate fi folosita ca atare, ci necesita prelucrari ulterioare.
b) Adaptorul A are rolul de a adapta informatia de la iesirea elementului sensibil la cerintele impuse de aparatura de automatizare utilizata. Functii realizate de adaptor:
adaptare - de nivel;
de putere (impedanta);
comparatia cu unitatea de masura adoptata, prin conversia variatiilor de stare a elementelor sensibile in semnale calibrate reprezentand valoarea marimii de intrare.
Comparatia poate fi
simultana, cand marimea etalon exercita o actiune permanenta;
succesiva, cand marimea etalon este aplicata din exterior, initial, in cadrul operatiei de calibrare, anumite elemente constructive memorand efectele sale si utilizandu-le ulterior in procesul de masurare;
operatii asupra marimii: in functie de legile fizice pe care se bazeaza detectia, ele pot fi:
liniare (atenuare, amplificare, sumare, integrare, diferentiere);
neliniare (produs, ridicare la putere);
realizarea unor functii neliniare particulare intentionat introduse pentru compensarea neliniaritatilor inerente si asigurarea unei dependente globale intrare - iesire liniare in cadrul traductorului.
Adaptoarele pot fi:
electrice (electronice) - furnizeaza la iesire un semnal electric;
pneumatice - furnizeaza semnal pneumatic.
Dupa forma de variatie a semnalului, se impart in:
analogice, care presupun o variatie continua a unui parametru caracteristic, in sensul unificat cum ar fi:
c.c.: 0,5 mA, 210 mA, 420mA;
tensiune continua: 0,10 V; 0,20 V; 10 V;
presiune (aer): 20,10 kN/m2;
numerice - cand sunt prevazute cu CAN (convertoare analog-numerice). S-au impus prin folosirea pe scara tot mai larga a echipamentelor de reglare numerica si a calculatoarelor de proces. Codurile numerice de iesire trebuie sa fie compatibile cu echipamentele (interferentele calculatoarelor), impunand si o standardizare a semnalelor numerice furnizate de traductoare. Cele mai folosite coduri sunt:
binar natural pe 8, 10, 12, 16 biti;
binar codificat zecimal (BCD) de 2, 3, 4 decade.
c) Elementele de transmisie - sunt elemente auxiliare care realizeaza conexiuni electrice, mecanice, optice sau de alta natura in situatiile in care tehnologiile de realizare a traductorului o impun.
d) Sursa de energie, necesara in cele mai frecvente cazuri, pentru a menaja energia semnalului util.
Caracteristici si performante de regim dinamic
Regimul dinamic al unui traductor corespunde functionarii acestuia in situatia in care marimea de masurat, deci semnalul lui de iesire, variaza in timp. Studierea acestui regim este importanta prin faptul ca traductoarele, fiind incluse uzual in sisteme automate, se afla in mod obisnuit in acest regim.
Modalitati de caracterizare a regimului dinamic
Considerand traductorul ca un element liniar cu o intrare si o iesire, functionarea in regim dinamic este caracterizata de o ecuatie diferentiala de forma:
![]()
unde ![]() si
si ![]() sunt derivatele in
raport cu timpul de ordinul q si k ale marimii de intrare
sunt derivatele in
raport cu timpul de ordinul q si k ale marimii de intrare ![]() , respectiv de iesire
, respectiv de iesire ![]() , cu coeficientii ak si bk
constanti.
, cu coeficientii ak si bk
constanti.
Forma generala a solutiei ecuatiei este:
![]()
unde:
![]() - este componenta
tranzitorie libera, care nu depinde de intrare, fiind determinata
numai de dinamica traductorului si de conditiile initiale nenule
de la iesire;
- este componenta
tranzitorie libera, care nu depinde de intrare, fiind determinata
numai de dinamica traductorului si de conditiile initiale nenule
de la iesire;
![]() - este componenta
tranzitorie, care depinde atat de dinamica traductorului cat si de intrare;
- este componenta
tranzitorie, care depinde atat de dinamica traductorului cat si de intrare;
![]() - este componenta de
regim stabilizat sau permanent, in care, datorita liniaritatii
se regaseste forma de variatie a intrarii.
- este componenta de
regim stabilizat sau permanent, in care, datorita liniaritatii
se regaseste forma de variatie a intrarii.
Regimul dinamic comporta o parte tranzitorie si una permanenta (stabilizata).
Traductorul ideal din punctul de vedere al comportarii dinamice ar fi acela la care componentele tranzitorii nu ar exista si deci, variatiile intrarii s-ar regasi intotdeauna la iesire, amplificate sau atenuate, conform caracteristicilor statice. Practic acest lucru nu este posibil, componentele tranzitorii exista, valorile si durata lor depinzand de caracteristicile dinamice. Se adopta ca ipoteze simplificatoare conditii initiale nule si, aplicand transformata Laplace, se obtine:
 .
.
Prin definitie raportul:
poarta numele de functie de transfer. Ea permite o exprimare algebrica si deducerea raspunsului la orice intrare:
![]() .
.
Functia de transfer permite o corelatie intre analiza teoretica a regimului dinamic si determinarile experimentale. Exista astfel doua metodologii de interpretare a caracteristicilor experimentale prin prisma semnificatiei functiei de transfer:
in domeniul timp, pe baza raspunsului la functia impuls sau treapta, tinand seama de interpretarea functiei de transfer ca transformata Laplace a raspunsului la impuls Dirac;
in domeniul frecventa, pe baza raspunsului permanent armonic (la marime de intrare sinusoidala).
Prin prima metodologie se poate lucra cu marime de intrare tip impuls Dirac si, trecand prin functia pondere, sa se deduca prin transformata Laplace functia de transfer. Mai accesibila este insa aplicarea la intrare a unui semnal treapta, raspunsul sistemului purtand numele in acest caz de functia indiciala.
A doua metodologie
presupune aplicarea la intrare a unui semnal sinusoidal de forma ![]() .
.
Marimea de iesire in regim stabilizat va avea amplitudinea si faza dependente de frecventa:
![]()
sau sub forma complexa:
![]()
cu ![]() constant.
constant.
Valorile modulului ![]() , pentru
, pentru ![]() reprezinta
caracteristica amplitudine - pulsatie, iar
reprezinta
caracteristica amplitudine - pulsatie, iar ![]() caracteristica
faza - pulsatie, a caror ridicare experimentala permit
deducerea functiei de transfer.
caracteristica
faza - pulsatie, a caror ridicare experimentala permit
deducerea functiei de transfer.
Caracteristici energetice
Puterea consumata in procesul de masurare poate fi luata partial sau total de la marimile de masurat, ele putand fi clasificate din acest punct de vedere in marimi:
active, care pot asigura aceasta putere;
pasive, care necesita o sursa de energie auxiliara.
Oricarei marimi X supuse masurarii i se poate asocia o marime J astfel incat produsul XJ sa reprezinte o putere. Raportul lor este in acest caz de natura unei impedante - impedanta generalizata (metrologica):
![]()
unde:
Zs este impedanta sursei;
Zm este impedanta mijlocului de masura;
Este de dorit ca Zm sa fie cat mai mare pentru ca puterea solicitata de aparat sa fie cat mai mica. Obtinerea unei impedante cat mai mari este o preocupare permanenta la realizarea traductoarelor.
Se pune problema adaptarii impedantei Zm in raport cu cea a sursei Zs astfel incat consumul energetic, si deci eroarea, sa se mentina in limite stranse.
Adaptarea la nivel (amplitudine) presupune:
micsorarea amplitudinii marimii de masurat X (transformatoarele de masurare de curent si de tensiune, parghiile pentru forte si deplasari, pistoane cu sectiuni diferite pentru presiuni);
folosirea de amplificatoare de masurare, cand marimea de intrare este deja o sursa auxiliara; se realizeaza in acest fel si adaptarea de putere.
Pentru marimile pasive, folosirea unei surse auxiliare devine obligatorie.
Pentru caracterizarea puterii cerute de la marimea de masurat, la un traductor se precizeaza impedanta de intrare, iar pentru sursa auxiliara natura sa (c.c. sau c.a.), valoarea paramerului (tensiune, curent) si limitele admise de variatie.
Pentru cuplarea cu aparatul de masura receptor, se precizeaza parametrii semnalului de iesire al traductoarelor, ceea ce impune impedanta de intrare a acestuia.
Caracteristici constructive
Indicatorii acestor caracteristice vizeaza modul in care traductoarele isi pastreaza caracteristicile functionale sub actiunea marimilor de influenta.
Principalele caracteristici constructive sunt:
robustetea - consta in limitarea la maxim a restrictiilor impuse traductoarelor privind conditiile de socuri, vibratii, variatii mari de temperatura, umiditate, presiune, agenti nocivi chimici sau biologici, a parametrilor sursei de alimentare;
capacitatea de supraincarcare defineste proprietatea unui traductor de a suporta valori ale marimii de masurat care depasesc limita superioara a domeniului, fara ca prin aceasta sa rezulte modificari ale performantelor functionale (liniaritate, sensibilitate, precizie) sau deteriorari constructive; i se asociaza un timp, efectele distructive depinzand si de durata. Pe timp scurt se numeste soc, pe timp mai scurt, se numeste suprasarcina;
protectia climatica este constituita din ansamblul de masuri care se iau in cadrul calculelor de dimensionare si alegere a materialelor, pieselor si componentelor in proiectarea formei si detaliilor constructive, in special ale carcasei, in stabilirea acoperirii suprafetelor si a tehnologiei de executie pentru a se asigura ca actiunea complexa a factorilor chimici pe o anumita durata sa nu influenteze nefavorabil asupra proprietatilor functionale;
protectia contra exploziilor cuprinde masurile specifice aplicate in constructia si montarea traductoarelor - electrice si electronice in special - in scopul de a evita aprinderea atmosferei explozive exterioare de catre acestea in diverse regimuri de functionare;
protectia anticorosiva consta in evitarea corodarii suprafetelor de contact ale traductoarelor la venirea in contact cu diverse fluide (acizi, baze, saruri) cu actiune coroziva;
gradele normale de protectie sunt masuri stabilite prin normative standardizate prin care se asigura o serie de protectii specifice utilajelor electrice, precum: protectia persoanelor contra atingerii partilor interioare aflate sub tensiune, protectia contra patrunderii corpurilor straine solide, a apei, contra deteriorarilor mecanice. Sunt simbolizate prin litere IP urmate de doua sau trei cifre. Pentru traductoarele electrice protejate suplimentar contra intemperiilor se intercaleaza litera W intre IP si cifrele care urmeaza.
Efectele socurilor si vibratiilor mecanice. Asigurarea impotriva lor
Jocurile si vibratiile au efecte in special asupra rigiditatii structurilor mecanice, mecanismelor de cuplare si organelor de fixare. Pot fi influentate si contactele electrice si se pot produce ruperi ale conductoarelor. Daca vibratiile au frecventa variabila, exista pericolul atingerii frecventei proprii de rezonanta a structurilor mecanice. Jocurile pot produce deteriorari mecanice, degradari ale partilor electronice (smulgeri, deplasari ale plachetelor, circuitelor etc.).
Masurile care se iau pentru asigurarea traductoarelor impotriva acestor efecte constau in rigidizarea corespunzatoare a pieselor componente si subansamblurilor, alegerea unor jocuri optime pentru piesele mobile, reducerea momentelor de inertie si calibrarea corecta a pieselor aflate in rotatie, prevederea de elemente amortizoare, miniaturizarea. Se prevad probe de incercare la socuri si vibratii, cu anumite frecvente, pe diferite durate.
Pentru fiecare tip de traductor se specifica gama de vibratii - ca frecventa si amplitudine - la care rezista.
Fiabilitatea traductoarelor
Proprietatea ca traductoarele sa functioneze in limitele parametrilor lor, fara defectare, un timp cat mai indelungat, defineste in sens larg fiabilitatea.
Posibilitatea de prevenire, depistare si inlaturare a defectiunilor asigura proprietatea de reparabilitate. Proprietatea ca dupa reparatii traductorul sa-si reia capacitatea de functionare se numeste restabilire.
Drept masura a fiabilitatii - cantitativ - se considera probabilitatea functionarii fara defectiuni in decursul unui interval de timp, in conditii date.
Intervalul de timp T in care un traductor functioneaza fara defecte se numeste timp de buna functionare.
Alti indicatori de fiabilitate:
frecventa de aparitie a defectelor - estimata prin numarul de DN care apar intr-un interval de timp Dt la lotul de aparate N0:
![]()
rata defectarii ![]() este densitatea de
reparatie a defectarii la momentul t, conditionata de faptul
ca aparatul respectiv a functionat fara defectiuni
pana la momentul considerat.
este densitatea de
reparatie a defectarii la momentul t, conditionata de faptul
ca aparatul respectiv a functionat fara defectiuni
pana la momentul considerat.
Functia de fiabilitate:
![]() .
.
Daca ![]() este constanta:
este constanta:
![]() .
.
Media timpului de buna functionare:
![]()
![]()
Probabilitatea ca timpul de functionare sa fie T0 este:
![]()
Calculul traductoarelor capacitive
Traductoarele capacitive cu suprafete cilindrice sunt folosite, in mod frecvent, in aviatie pentru masurarea nivelului de combustibil din rezervoare. Constructiv se executa sub forma unor condensatori coaxiali cilindrici cu mai multe armaturi, dispusi vertical, in interiorul lor intrand combustibilul (lichid) caracterizat prin permitivitatea dielectrica e. De regula, schema de masurare (punte Sauty), in care se masoara capacitatea, se alimenteaza in curent alternativ cu frecventa de 400 Hz.
Intr-o prima aproximatie se poate considera un simplu condensator cilindric compus dintr-o armatura cilindrica exterioara. Cilindrul interior poate fi prevazut cu izolant protector. Introducand traductorul in rezervor, combustibilul va patrunde intre cele doua armaturi pana la o inaltime egala cu nivelul combustibilului din rezervor. Intrucat constanta dielectrica a benzinei, petrolului, uleiului, etc. este de cateva ori mai mare decat permitivitatea aerului (sau a vaporilor acestor substante) existente in rezervor, inseamna ca pe masura ce se introduce combustibil in rezervor, capacitatea traductorului creste devenind maxima cand rezervorul este plin. Avantajul principal al acestor litrometre consta in faptul ca nu au piese in miscare. Ele permit sa se elimine, cel putin partial, erorile datorate inclinarii si acceleratiei, prin montarea in acelasi rezervor a doua sau mai multe traductoare legate in paralel.
Caracteristica ![]() se deduce considerand
ca traductorul este un condensator cilindric cu doua tronsoane: unul
cu lungime x avand ca dielectric stratul izolant de pe electrodul interior
(permitivitatea e ) si combustibilul din rezervor
(permitivitate e ); altul de lungime h-x avand ca strat
izolant aerul sau vaporii de combustibil (permitivitatea e
se deduce considerand
ca traductorul este un condensator cilindric cu doua tronsoane: unul
cu lungime x avand ca dielectric stratul izolant de pe electrodul interior
(permitivitatea e ) si combustibilul din rezervor
(permitivitate e ); altul de lungime h-x avand ca strat
izolant aerul sau vaporii de combustibil (permitivitatea e
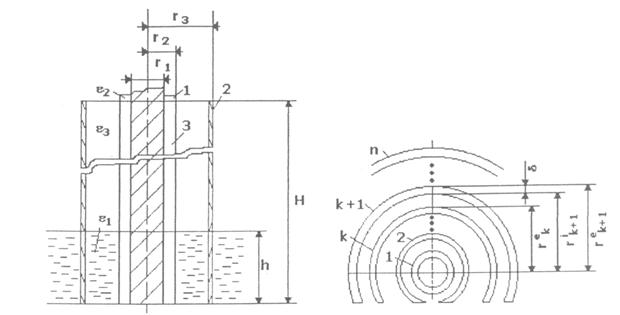
a) cu doua armaturi b) cu n armaturi coaxiale
1 - electrod interior; 2 - armatura exterioara; 3 - strat izolator.
Capacitatea
echivalenta se obtine considerand traductorul format din doua
condensatoare de capacitate ![]() si
si ![]() conectate in paralel.
conectate in paralel.

Astfel incat capacitatile ![]() si
si ![]() au expresiile:
au expresiile:
Capacitatea echivalenta Ce a traductorului este:

unde B1 si B2 sunt marimi ce depind de geometria electrozilor si permitivitate.
In particular, daca
se ia ![]() , deci cand lipseste stratul izolator al electrodului
interior, si considerand
, deci cand lipseste stratul izolator al electrodului
interior, si considerand ![]() se obtine pentru
capacitatea echivalenta expresia:
se obtine pentru
capacitatea echivalenta expresia:

Din aceasta expresie, prin derivare in raport cu x, se obtine sensibilitatea traductorului:
![]()
unde  . Se observa ca sensibilitatea traductorului scade
cu cresterea raportului
. Se observa ca sensibilitatea traductorului scade
cu cresterea raportului ![]() motiv pentru care
valoare lui nu trebuie sa fie mare. De regula diferenta
motiv pentru care
valoare lui nu trebuie sa fie mare. De regula diferenta ![]() se ia cuprinsa
intre 1,5 mm si 6 mm. Pentru a mari sensibilitatea traductoarelor
capacitive, acestea se realizeaza cu mai multe armaturi coaxiale.
Daca se noteaza cu n numarul armaturilor, atunci
capacitatea echivalenta condensatoarelor considerate conectate in paralel
are expresia:
se ia cuprinsa
intre 1,5 mm si 6 mm. Pentru a mari sensibilitatea traductoarelor
capacitive, acestea se realizeaza cu mai multe armaturi coaxiale.
Daca se noteaza cu n numarul armaturilor, atunci
capacitatea echivalenta condensatoarelor considerate conectate in paralel
are expresia:
Notand cu d grosimea armaturilor si considerand indeplinita conditia:
![]()
![]()
Din aceasta expresie se observa ca
functia ![]() este liniara in
raport cu marimea de intrare x, iar pentru x = 0, capacitatea initiala
este liniara in
raport cu marimea de intrare x, iar pentru x = 0, capacitatea initiala
![]() nu este zero.
nu este zero.
De asemenea, se
observa ca reactanta capacitiva ![]() are o
dependenta neliniara cu x. Pentru a liniariza caracteristica
are o
dependenta neliniara cu x. Pentru a liniariza caracteristica ![]() a traductorului
capacitiv se pot utiliza armaturi prevazute cu orificii distribuite
in functie de x, astfel incat sa rezulte o caracteristica
liniara in raport cu x. Armaturile cu orificii se plaseaza
astfel: daca n este par atunci orificiile sunt in fiecare izolatie impara,
iar daca n este impar, in fiecare izolatie para, ordinea de
numerotare fiind corespunzatoare desenului de mai jos.
a traductorului
capacitiv se pot utiliza armaturi prevazute cu orificii distribuite
in functie de x, astfel incat sa rezulte o caracteristica
liniara in raport cu x. Armaturile cu orificii se plaseaza
astfel: daca n este par atunci orificiile sunt in fiecare izolatie impara,
iar daca n este impar, in fiecare izolatie para, ordinea de
numerotare fiind corespunzatoare desenului de mai jos.
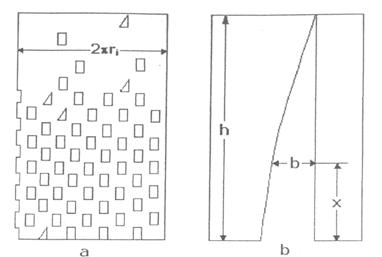
In aceasta
figura este prezentata: a) desfasurata unei armaturi
in care s-au realizat orificii; b) armatura echivalenta care are
latimea fantei, ![]() , egala cu suma latimilor orificiilor din
sectiunea nivelului x. Daca
, egala cu suma latimilor orificiilor din
sectiunea nivelului x. Daca ![]() dispunerea in randuri
a orificiilor nu este posibila si, in acest caz, orificiile se dispun
pe o curba elicoidala, pana cand
dispunerea in randuri
a orificiilor nu este posibila si, in acest caz, orificiile se dispun
pe o curba elicoidala, pana cand ![]() , deci
, deci ![]() .
.
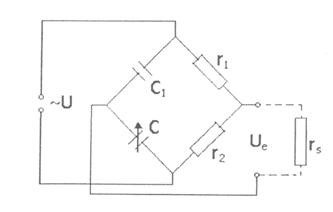
La conectarea
traductorului capacitiv, intr-o schema de masurare in punte (figura
urmatoare), in laturile careia se gasesc rezistentele r1,
r2 si capacitatea C1, tensiunea la bornele de
iesire a schemei in regim de mers in gol ![]() este data de
relatia:
este data de
relatia:
![]()
iar impedanta interna a schemei:
![]()
Pentru compensarea capacitatii initiale a traductorului - Cmin - se aleg elementele schemei in punte incat acestea sa fie in echilibru la C = Cmin, asadar se respecta relatia:
![]()
Considerand:
![]()
atunci avem:
![]()
relatia devine:
![]()
Pentru ![]() tensiunea la
iesire are expresia:
tensiunea la
iesire are expresia:
![]()
iar
sensibilitatea maxima a traductorului se obtine cand ![]() , rezultand valoarea optima pentru k1:
, rezultand valoarea optima pentru k1:
![]()
si corespunzator tensiunea maxima la iesire pentru mersul in gol:
Prin urmare, tinand cont de conditia stabilita pentru sensibilitatea maxima, expresiile impedantei interne a schemei si tensiunea la iesire pentru mersul in gol devin:
Daca se considera:
![]()
atunci:
Pentru ![]() , valoarea rezistentei de sarcina care sa
asigure puterea maxima la iesire este data de relatia:
, valoarea rezistentei de sarcina care sa
asigure puterea maxima la iesire este data de relatia:
iar tensiunea de iesire ca marime complexa, cand exista sarcina rS, se determina cu teorema lui Thevenin, deci:
Exprimand numai modulul:

si avem tensiunea de iesire la mersul in sarcina:
Studiul dependentei
functionale, ![]() pentru
pentru ![]() , arata ca acesta nu are extrem
, arata ca acesta nu are extrem  , iar pentru
, iar pentru ![]() se obtine
se obtine ![]() . Practic este suficient sa se ia
. Practic este suficient sa se ia ![]() pentru ca sa se
atinga aceasta limita cu o precizie de 13,5 %.
pentru ca sa se
atinga aceasta limita cu o precizie de 13,5 %.
Atunci cand exista orificii in armatura si nu este indeplinita conditia
![]()
capacitatea pe unitatea de lungime a traductorului este data de relatia:
![]()
Capacitatea totala C a traductorului cand in acesta exista combustibil pana la nivelul x este data de relatia:
![]()
in care
Cp este capacitatea partii din traductor in care se
afla combustibil (pline) cu permitivitatea relativa ![]() :
:
![]()
iar Cg capacitatea portiunii din traductor unde nu se gaseste combustibil (goale):
![]()
Prin urmare:
![]()
unde:
![]()
este capacitatea traductorului la x = 0, iar
![]()
este capacitatea traductorului fara orificii in armaturi atunci cand nu exista carburant.
Intre capacitatea Cp
a traductorului plin si capacitatea ![]() a traductorului gol
exista relatia:
a traductorului gol
exista relatia:
![]()
In scopul stabilirii
unor relatii mai generale si al unui algoritm de calcul se introduce
functia ![]() definita in modul
urmator:
definita in modul
urmator:
![]()
unde ![]() este
inaltimea relativa a carburantului in traductor.
este
inaltimea relativa a carburantului in traductor.
![]()
Ecuatia caracteristicii statice a traductorului:
Daca aceasta caracteristica este liniara, atunci intre marimea de iesire si marimea de intrare exista relatia:
![]()
in care K este sensibilitatea traductorului la functionarea in sarcina.
Valoarea maxima a
tensiunii de iesire ![]() se obtine din
ecuatia caracteristicii statice a traductorului in care se pune
conditia:
se obtine din
ecuatia caracteristicii statice a traductorului in care se pune
conditia:
![]()
Daca
dependenta este liniara, atunci ![]() si
si
Eliminand pe Ue se obtine:
unde: ![]() ;
; ![]() .
.
Legea de variatie a
lui ![]() necesara pentru
obtinerea unei caracteristici liniare se determina cu ajutorul
relatiei anterioare, rezultand urmatoarea dependenta
functionala intre marimi:
necesara pentru
obtinerea unei caracteristici liniare se determina cu ajutorul
relatiei anterioare, rezultand urmatoarea dependenta
functionala intre marimi:
Din aceasta
relatie se observa ca la cresterea lui ![]() , latimea echivalenta (unghiulara)
, latimea echivalenta (unghiulara) ![]() a orificiilor scade.
Cunoscand ca
a orificiilor scade.
Cunoscand ca ![]() la
la ![]() din relatie se
determina raportul
din relatie se
determina raportul ![]() .
.
Pentru calculul unui traductor capacitiv de acest tip se considera cunoscute marimile:
tensiunea sursei de alimentare, U;
frecventa tensiunii, f;
permitivitatea relativa a
carburantului, ![]() ;
;
inaltimea traductorului, h;
numarul de armaturi, n;
diametrul exterior al traductorului, D.
In acest caz ordinea de
calcul este urmatoarea: se ia ![]() si se alege
grosimea armaturii traductorului capacitiv. Se adopta raportul m cat
mai aproape de unitate si cu relatia (6) se calculeaza razele
exterioare ale tuturor armaturilor. Cu relatia (32) in care se ia
si se alege
grosimea armaturii traductorului capacitiv. Se adopta raportul m cat
mai aproape de unitate si cu relatia (6) se calculeaza razele
exterioare ale tuturor armaturilor. Cu relatia (32) in care se ia ![]() se determina
legea de variatie a lui
se determina
legea de variatie a lui ![]() (care pune in
evidenta influenta orificiilor) si tinand cont de
(28), precum si de faptul ca
(care pune in
evidenta influenta orificiilor) si tinand cont de
(28), precum si de faptul ca ![]() pentru
pentru ![]() rezulta raportul
rezulta raportul ![]() . Se traseaza curba
. Se traseaza curba ![]() si se pozitioneaza
orificiile. Cu relatiile (10) si (14) se determina capacitatea
condensatorului C1, iar cu (18) se calculeaza valoarea
rezistentei r1 din schema puntii. Se determina
valoarea rezistentei r2 din schema puntii folosind
relatia (11). Din relatiile (18) si (20) se calculeaza rezistenta
sarcinii:
si se pozitioneaza
orificiile. Cu relatiile (10) si (14) se determina capacitatea
condensatorului C1, iar cu (18) se calculeaza valoarea
rezistentei r1 din schema puntii. Se determina
valoarea rezistentei r2 din schema puntii folosind
relatia (11). Din relatiile (18) si (20) se calculeaza rezistenta
sarcinii:
sau impedanta interna a schemei:
Cu relatiile (15) si (31) se determina ![]() si Ue
dupa care se calculeaza sensibilitatea cu relatia:
si Ue
dupa care se calculeaza sensibilitatea cu relatia:
![]()
dedusa din relatia (30).
Se alege: d = 1 mm; k2 = 8; m = 1,09 si se calculeaza raza
armaturii exterioare ![]()
Pe baza relatiei (6) se calculeaza razele exterioare ale armaturilor 4, 3, 2 si 1:
Se calculeaza capacitatea
traductorului fara orificii in armaturi cand nu exista
carburant ![]() , cat si capacitatea traductorului plin cu carburant Cp:
, cat si capacitatea traductorului plin cu carburant Cp:

Se inlocuiesc valorile calculate in relatia (33) si dupa efectuarea calculelor rezulta urmatoarea dependenta functionala:
Din
conditia ![]() pentru
pentru ![]() se obtine
raportul:
se obtine
raportul:
Inlocuind valoarea raportului
determinat ![]() in relatia (33)
se obtine, in final, pentru legea de variatie a lui a
in relatia (33)
se obtine, in final, pentru legea de variatie a lui a
![]() cu
cu ![]() ,
,
x fiind nivelul carburantului (in traductor), urmatoarea relatie:
Se construieste graficul pentru determinarea suprafetei orificiilor de pe armaturile 2 si 4, curba 1 pentru care axa Oy este in stanga graficului.
Cu relatiile (10) si (14) se calculeaza:
![]() ,
,
Dupa care pe baza relatiilor (18), (11) si (34) se determina rezistentele r1, r2 si rs:
Puterea maxima disipata pe rezistentele din schema se produce pe rezistenta r1:
![]()
iar tensiunea maxima a condensatorului C1 este de 115 V, marimi necesare pentru alegerea componentelor din schema puntii de masura.
Pe baza relatiei (35) in care se inlocuiesc valorile calculate si cunoscute se determina expresia impedantei schemei:
Marime ce depinde de nivelul carburantului in traductor.
Cu relatiile (15) si (31) se determina tensiunea maxima la iesire pentru mersul in gol si in sarcina:
din care rezulta sensibilitatea K:
![]()
Calculul parametrilor puntii de masurare
Cc - capacitate etalon;
![]() , unde k1 - constanta;
, unde k1 - constanta;
C - capacitatea variabila a traductorului;
Rs - rezistenta de sarcina;
Uies - tensiunea aplicata lui Rs;
Tensiunea de iesire la mers in gol:
![]() , unde
, unde 
r1 - rezistenta variabila legata mecanic de rotorul motorului asincron trifazat si de acul indicator;
Impedanta Z se calculeaza astfel:
Limitele intre care variaza tensiunea de la iesirea puntii vor fi pentru X = 0:
![]()
Puntea este
echilibrata pentru ![]()
![]() .
.
Dupa cum se observa tensiunea va fi maxima cand C = Cmax, deci atunci cand valoarea relativa a nivelului de combustibil va fi x = 1, deci x = h:
Raportul ![]() trebuie sa fie
maxim:
trebuie sa fie
maxim:
Dar ![]() ,
, ![]()
Unul din bratele puntii de masurare este format dintr-un reostat al carui cursor este actionat de catre un motoras. Din rolul sau de autoechilibrare rezulta ca valoarea acestei rezistente trebuie sa depinda de valoarea capacitatii variabile a traductorului si implicit de nivelul combustibilului din rezervor.
Se alege valoarea: ![]() unde k2
este o constanta aleasa arbitrar.
unde k2
este o constanta aleasa arbitrar.
In conditii normale de functionare rezistenta de sarcina Rs nu e infinita ci are o valoare pe care o putem determina din conditia transferului maxim de putere la iesire:
![]() cand C = Cmax.
cand C = Cmax.
In acest caz, cand rezistenta Rs este conectata, tensiunea de iesire:
Pentru ![]() si
si ![]() au extreme.
au extreme.
Pentru ![]() si
si ![]()
![]()
In general ![]() pentru k = 2 si e
pentru k = 2 si e
![]()
Se obtine o valoare
cu 13,7 % mai mica decat cea obtinuta in cazul ![]() .
.
In calculele anterioare am aratat ca:
Consideram ![]()
Conditia de
echilibrare a puntii este Uies = 0 ceea ce implica ![]() , adica
, adica ![]() expresia echilibrului
in modul si faza.
expresia echilibrului
in modul si faza.
Pentru imbunatatirea sensibilitatii sistemului, se alege un sistem de indicare bazat pe un mecanism de urmarire format dintr-un amplificator al tensiunii de iesire Uies. Un motor asincron bifazat care e sensibil la sensul dezechilibrului puntii.
Motorasul actioneaza acul indicator al aparatului printr-un reductor si totodata se modifica valoarea rezistentelor r1 si r2 pentru realizarea echilibrului puntii.
Daca s-ar actiona asupra rezistentei r2, vom avea egalitatea:
![]()
unde Dr2 - reprezinta variatia rezistentei r2;
DC - reprezinta variatia de capacitate a traductorului:
![]()
Dar capacitatea C reprezinta o variatie liniara cu nivelul de combustibil. Relatia pentru Dr2 nu este liniara in raport cu capacitatea, ceea ce ar impune ca potentiometrul r2, sa fie profilat (sa aiba o anumita forma, astfel incat relatia lui Dr2 sa fie liniara in raport cu capacitatea) pentru realizarea echilibrului puntii. Din acest motiv se actioneaza asupra rezistentei r1. potentiometrul r1 e cuplat mecanic prin intermediul reductorului cu elementul de executie.
Conditia de autoechilibrare a puntii va fi:

Pentru determinarea variatiei rezistentei r1 este necesara cunoasterea elementelor puntii. Elementul principal al puntii este traductorul de capacitate. Pentru cresterea sensibilitatii se monteaza mai multe traductoare in paralel in acelasi rezervor. Traductoarele fiind niste condensatoare montate in paralel, rezulta relatia pentru capacitatea corespunzatoare a rezervorului gol:
![]()
unde n - numarul de traductoare din rezervor.

Capacitatea etalon din diagonala puntii va fi:
![]() , iar
, iar ![]() unde
unde ![]() .
.
Se alege:
![]() si f = 400 Hz
si f = 400 Hz
Variatia capacitatii masurate este data de relatia:
unde:
![]() - tensiunea de alimentare;
- tensiunea de alimentare;
C - capacitatea initiala a traductorului;
![]() - valoarea potentiometrului r1 la
echilibrarea puntii.
- valoarea potentiometrului r1 la
echilibrarea puntii.
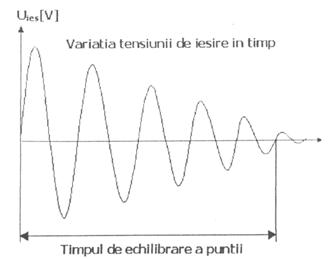
Tensiunea de iesire
are urmatoarele dependente de timp: ne intereseaza doar anvelopa
semnalului, deci vom considera U = E in loc de ![]() , dupa care calculam concret puntea de
masurare.
, dupa care calculam concret puntea de
masurare.
In cadrul rezervorului 1 sau 2 sunt montate trei traductoare de lungimi diferite:
h1 = 0,434 m; h2 = 0,482 m; h3 = 0,506 m.
Limitele rezistentei variabile r1 sunt:
 Alegem varianta constructiva in care rezistenta r1
este formata dintr-un suport de material izolant pe care se
gaseste infasurat firul rezistiv pe care aluneca
cursorul.
Alegem varianta constructiva in care rezistenta r1
este formata dintr-un suport de material izolant pe care se
gaseste infasurat firul rezistiv pe care aluneca
cursorul.
Variatia rezistentei cu pozitia cursorului trebuie sa fie cat mai liniara. Consideram ca rezistenta reglabila este dispusa pe circumferinta unui cerc de raza l = 5 cm, raza dedusa din considerente de gabarit.
Pentru ![]()
Intrucat:
Pentru ![]()
Sensibilitatea
volumica este: ![]() sau
sau
Kv = 0,004232 V / l;
K = Uies max. / h = 21,4141 V/m.
Caz A: traductor cu armaturile intregi
|
|
C [nF] |
Uies [V] |
K [V/m] |
Caz B: traductor cu armatura decupata
|
|
|
C [nF] |
Uies [V] |
K [V/m] |
Alegerea factorului de amplificare
Vom folosi un amplificator electronic care, in comparatie cu alte tipuri de amplificatoare are urmatoarele avantaje:
posibilitatea amplificarii semnalelor foarte mici;
obtinerea unor factori de amplificare mari;
inertie mica;
banda larga a frecventelor amplificate;
dimensiuni mici si cost redus;
stabilitate relativ ridicata a caracteristicilor;
influenta redusa a mediului ambiant asupra actionarii.
Cuplarea optima a amplificatoarelor cu motorasul asigura obtinerea unei constante de timp electromecanice minime a sistemului, cu o debitare a puterii maxime catre amplificator.
Motorasul urmareste modificarea volumului combustibilului din rezervor cu o anumita intarziere in timp dictata de inertiile care apar, pe panta caracteristicii motorasului si de constanta de timp a intregii actionari.
In timpul acesta volumul se modifica si ne intereseaza care este variatia maxima ce poate sa apara. La variatia maxima a volumului in acest interval, tensiunea de iesire va fi si ea maxima si este necesar sa o cunoastem pentru a putea dimensiona factorul de amplificare, astfel incat tensiunea amplificata sa nu depaseasca tensiunea de comanda a motorasului (35 V) pentru regimul intensificat.
Variatia maxima a volumului in intervalul de timp specificat poate avea loc la alimentarea cu combustibil a rezervoarelor sau la evacuarea rapida de avarie.
In aceste conditii, tensiunea maxima care poate iesi din punte si intra la amplificator este de aproximativ 0,15 V.
Rezulta de aici ca factorul de amplificare este:
 , unde
, unde ![]() este tensiunea
nominala de comanda.
este tensiunea
nominala de comanda.
Alegerea factorului de amplificare
Caracteristicile pe care trebuie sa le aiba elementul de executie sunt:
gama larga, continua, de variatie a vitezei, cu frecvente schimbari de sensuri de rotatie;
caracteristica de reglaj, pe cat posibil liniara;
constante de timp cat mai mici.
Servomotoarele de curent alternativ indeplinesc aceste cerinte si mai au si alte avantaje:
robustete mai mare si inertie mai mica decat la motoarele de curent continuu;
usurinta in realizarea amplificatorului de curent alternativ de comanda.
Vom alege ca element de executie un motoras asincron bifazat. Elementele constructive principale ale acestor tipuri de motoare sunt: rotorul in scurtcircuit si statorul pe care sunt plasate cele doua infasurari (de comanda si de executie).
Exista trei posibilitati de a comanda acest servomotor:
a) reglaj in amplitudine (variaza amplitudinea semnalului de comanda);
b) reglaj de faza (variaza faza semnalului de comanda);
c) reglaj in amplitudine si faza.
Ne intereseaza reglajul in amplitudine fiindca este mai usor de realizat.

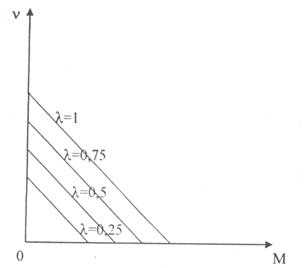
Figura reprezinta caracteristica mecanica a unui motor electric de curent alternativ bifazat, cu reglaj in amplitudine.
Functionarea motorului bifazat are la baza existenta la periferia interioara a statorului a doua campuri invartitoare care determina doua cupluri, unul in sens direct, altul in sens invers.
In prezenta semnalului de comanda, cele doua amplitudini vor fi diferite si ca urmare, cuplul rezultant care e cuplul efectiv al motorului, va fi diferit de zero.
In absenta semnalului de comanda, servomotorul va face cele doua amplitudini sa fie egale iar cuplul motor sa fie zero.
|
Tipul de motor D.I.D. |
||||
|
Parametri | ||||
|
Tensiunea retelei [V] | ||||
|
Frecventa retelei [Hz] | ||||
|
Turatia nominala [rot/min] | ||||
|
Puterea utila [W] | ||||
|
Cuplul de rotatie [gfcm] | ||||
|
Cuplul de pornire [gfcm] | ||||
|
Momentul rotoric [gfcm2] | ||||
|
| ||||
|
| ||||
Tinand cont de puterea de sarcina:
Ps = 0,2 W, alegem motorul D.I.D. 0,5.
In general, pentru sistemul de urmarire, importanta cea mai mare o au calitatile dinamice si de aceea, la baza metodicii este situata alegerea motorului dupa cuplul de suprasarcina cu verificarea ulterioara a incalzirii motorului.
Ecuatia fundamentala a dinamicii de executie este:
unde,
J - momentul de inertie al sistemului motorului, reductorului si mecanismului de executie;
M - momentul activ;
Mr - momentul rezistent;
w - acceleratia unghiulara a axei de sarcina;
n - raportul de transmisie al reductorului de forta;
Mm - cuplul dezvoltat de motor;
Ms - cuplul static al sarcinii.
Pentru alegerea motorului asincron ne mai folosim de urmatorul tabel in care se prezinta puterea si momentul de inertie redus:
|
P [W] | |||||
|
Jredus [gfms2] |
Se disting doua cupluri statice de sarcina: activ si reactiv. Cuplul reactiv este sub forma de cuplu static de frecare, iar cuplul activ sub forma de cuplu static al sarcinii de vant.
In cazul de fata puterea de sarcina este:
Ps 0,2 W si Jredus = 0,005 gfms2
Daca consideram si frecarea vascoasa (cuplu rezistiv proportional cu viteza) si a momentului de inertie, avem constanta de timp a sistemului:
![]()
unde:
Tm - componenta mecanica a constantei de timp;
Te - componenta electromagnetica a constantei de timp;
Rezulta ca T < Tm si T < Te
Factorul de calitate al sistemelor de urmarire se micsoreaza la micsorarea componentei Tm si se mareste la micsorarea componentei Te. Deci, nu este indicat sa se mareasca artificial fm si fs deoarece:
![]() , unde:
, unde:
f - momentul specific al frecarii vascoase, redus la arborele mecanismului de executie;
fm - momentul specific al motorului;
fs - momentul specific al sarcinii;
Daca influenta lor este mica, se poate considera:
T = Te
Alegerea reductorului
La calculul servomotorului cu motor asincron bifazat si rotor in forma de pahar, va trebui sa luam in considerare inertia transmisiilor mecanice, care poate fi comparata cu inertia rotorului motorului.
In acest caz vom folosi un reductor cu inertie mica. Este necesar sa se aleaga, pe cat posibil, dimensiuni minime pentru roata dintata (pentru a asigura o functionare buna si un randament bun al transmisiei) cuplata nemijlocit cu arborele motorului de executie.
Calculul factorului de reducere se va face la capitolul referitor la studiul stabilitatii sistemului de urmarire artificial fm si fs, caci:
![]()
unde:
f - momentul specific al frecarii vascoase, redus la arborele mecanismului de executie;
fm - momentul specific al motorului;
fs - momentul specific al sarcinii.
Dupa cum am aratat mai sus si la capitolul precedent, daca influenta lor est mica se poate considera:
T = Te
Studiul stabilitatii sistemului de urmarire
Pentru studiul stabilitatii sistemului de urmarire vom considera o variatie liniara brusca a nivelului de combustibil, diferenta intre capacitatile masurate initial si final, considerand exemplul:
Din conditia de echilibru la momentul initial avem:
Din conditia de echilibru la momentul initial avem:
Trebuie determinata distanta pe care trebuie sa se deplaseze cursorul rezistentei r1 pentru a reechilibra puntea.
![]() , adica
, adica ![]()
Deci:
38,227 kW .......... 31,4 cm
0,691 kW ..........x cm
T x = 0,5683 cm
Numarul de rotatii pe care ar trebui sa-l faca cursorul va fi:
![]()
Ne propunem sa determinam raportul de transmisie al traductorului de la motoras la cursorul potentiometrului r1.
Acest raport de transmisie trebuie sa fie astfel incat sa se asigure un suprareglaj aproape nul intr-un timp de reglare optim.
De asemenea, am aratat ca la o variatie a capacitatii masurate DC, pentru o aducere a puntii la echilibru este necesara o variatie a rezistentei r1 cu:
Deci tensiunea de iesire la dezechilibrul puntii va fi:
Obtinem:
 , unde U = 115 V.
, unde U = 115 V.
Observam ca
tensiunea de iesire la dezechilibrul puntii este o relatie
neliniara ![]() si
si ![]() , deci nu putem calcula o functie de transfer intre cele
doua elemente. In consecinta vom aborda studiul
stabilitatii sistemului prin metoda intervalelor mici.
, deci nu putem calcula o functie de transfer intre cele
doua elemente. In consecinta vom aborda studiul
stabilitatii sistemului prin metoda intervalelor mici.
Prin inlocuirea valorilor rezistentelor si capacitatilor initiale si finale, avem:
![]()
Ecuatia de miscare a elementului de actionare este:
![]()
Relatia de mai sus este definita in ipoteza unei sarcini avand numai inertie si considerand constanta de timp electromagnetica mult mai mare ca cea mecanica. Avem:
J - momentul de inertie redus la axa sarcinii;
![]() ;
;
Mp - cuplul de pornire (fiind vorba de un motoras cu reglaj in amplitudine);
Mp - 12 Ue;
Uc - tensiunea de comanda;
F - panta caracteristicii mecanice;
W - viteza unghiulara de rotatie;
 , unde:
, unde: ![]()
![]() = 6 gfcm;
= 6 gfcm;
Mn = 3 gfcm;
nn = 9700 rot/min;
F = 0,1772 K = 1,1286
Ecuatia de miscare devine:
Conditiile la limita sunt:

Alegem pasul de 20 ms (pentru metoda intervalelor mici). Numarul de rotatii al motorasului la un pas va fi:
![]() , unde:
, unde:
![]() - viteza unghiulara la sfarsitul pasului respectiv;
- viteza unghiulara la sfarsitul pasului respectiv;
t - 0,02 K;
K - numarul de pasi.
Expresia variatiei rezistentei r1 pentru pasul urmator este:
![]()
unde:
a - factor de reducere al reductorului;
![]()
Avand expresia lui Dr1 la pasul urmator, se poate determina expresia tensiunii de dezechilibru (tensiunea de comanda) pentru pasul urmator:
![]()
Pentru diferite valori ale factorului de reducere a se determina timpul de reglaj, punand conditia ca suprareglajul sa fie nul.
|
a tr = 0,52 s |
a tr = 0,3 s |
a tr = 0,14 s |
||||||
|
Pasul |
Dr1 [W |
Uc [V] |
Pasul |
Dr1 [W |
Uc [V] |
Pasul |
Dr1 [W |
Uc [V] |
Din calcule s-a observat ca atunci cand a scade, scade si timpul de reglaj.
De la o anumita valoare insa, dupa un numar de pasi din ce in ce mai mic, apare suprareglajul (teoretic).
Valoarea limita este a = 29, deoarece tr30 = tr29 deci vom alege factorul de reducere a = 30 caruia ii corespunde timpul de reglaj:
treglaj = 0,14 s.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2159
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved