| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
MANIABILITATEA AUTOVEHICULULUI MERCEDES 509 CDI
Prin maniabilitatea autovehiculului se intelege capacitatea acestuia de a se deplasa cat mai exact in directia comandata de conducatorul auto, adica de a executa virajele dorite sau de a mentine mersul rectiliniu. O slaba maniabilitate a autovehiculului se caracterizeaza prin tendinta acestuia de a-si schimba spontan directia de mers, iar la rotirea volanului sa se deplaseze pe o curba care nu corespunde intocmai celei dorite de conducator prin rotirea (bracarea) rotilor de directie.
Aceasta caracteristica are importanta in asigurarea sigurantei circulatiei rutiere, prin asigurarea unei bune stabilitati pe o cale rutiera.
Autovehiculul MERCEDES 509 CDI are rotile de directie in fata si sunt inclinate la unghiuri diferite rotile motoare fiind amplasate in spate.
In figura 1 este prezentata schema virajului autovehiculului MERCEDES 509 CDI, avand rotile de directie inclinate la unghiuri diferite.
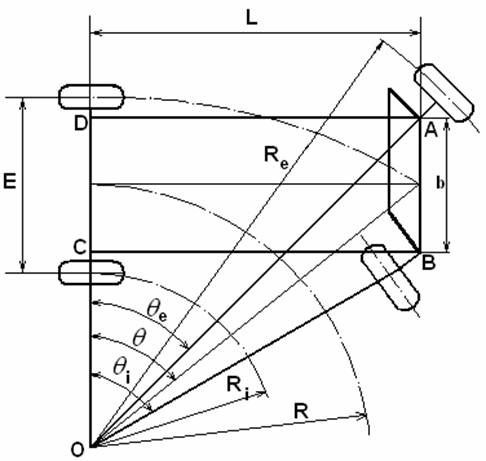
Fig. 1. Schema virajului autovehiculului MERCEDES 509 CDI .
Daca
rotile de directie ar fi inclinate cu acelasi unghi ![]() virajul autovehiculului ar avea loc in
conditiile unor alunecari transversale ale rotilor, ceea ce ar duce la
reducerea maniabilitatii autovehiculului in viraj, precum si la o uzura
accentuata a pneurilor.
virajul autovehiculului ar avea loc in
conditiile unor alunecari transversale ale rotilor, ceea ce ar duce la
reducerea maniabilitatii autovehiculului in viraj, precum si la o uzura
accentuata a pneurilor.
Pentru realizarea unui viraj corect, fara alunecari laterale, toate rotile autovehiculului trebuie sa descrie cercuri concentrice cu centrul in O, numit centru instantaneu de viraj.
In
cazul autovehiculelor cu doua punti, centrul O se gaseste la intersectia
prelungirii axei puntii din spate cu prelungirea axelor de rotatie ale rotilor
de directie, ceea ce inseamna ca in viraj rotile de directie nu mai sunt
paralele ci sunt inclinate cu unghiuri diferite. Rezulta ca unghiul de virare a
autovehiculului (![]() ) se obtine
prin dreapta care uneste centrul O si centrul puntii directoare din fata. In
acest caz, conditia de ecuatie corecta a virajului si de mentinere a directiei
in curba se obtine din triunghiurile OAD
si OBC:
) se obtine
prin dreapta care uneste centrul O si centrul puntii directoare din fata. In
acest caz, conditia de ecuatie corecta a virajului si de mentinere a directiei
in curba se obtine din triunghiurile OAD
si OBC:
 (1)
(1)
de unde rezulta conditia de executie corecta a virajului si este satisfacuta partial de mecanismul de directie clasic, cu paralelogram deformabil:
![]() (2)
(2)
in care L este ampatamentul autovehiculului, iar b distanta dintre axele pivotilor fuzetelor.
Pentru
unghiuri de inclinare a rotilor de directie pana la 15o, dependenta
reala dintre cele doua unghiuri ![]() si
si ![]() este foarte aproape de cea teoretica. Pentru
valori mari ale celor doua unghiuri (raze mici de viraj), conditia (2) este din
ce in ce mai putin satisfacuta, iar virajul are loc cu oarecare alunecari. Ca
urmare a elasticitatii laterale a pneurilor si datorita faptului ca virajele cu
raze mici se fac la viteze reduse, aceste alunecari sunt admisibile fara
periclitarea sigurantei in circulatie a autovehiculului.
este foarte aproape de cea teoretica. Pentru
valori mari ale celor doua unghiuri (raze mici de viraj), conditia (2) este din
ce in ce mai putin satisfacuta, iar virajul are loc cu oarecare alunecari. Ca
urmare a elasticitatii laterale a pneurilor si datorita faptului ca virajele cu
raze mici se fac la viteze reduse, aceste alunecari sunt admisibile fara
periclitarea sigurantei in circulatie a autovehiculului.
Deplasarea rectilinie sau in viraj a autovehiculului este caracterizata de fasia de gabarit, prin care se intelege aria generata de acesta la deplasarea rectilinie sau curbilinie, limitata de proiectiile pe sol ale traiectoriilor exterioare, adica ale punctelor de gabarit extreme. Forma si dimensiunile fasiei de gabarit caracterizeaza calitatile de maniabilitate ale autovehiculului si determina forma si dimensiunile drumurilor si suprafetelor pe care se deplaseaza autovehiculele. La deplasarea rectilinie, presupunand ca ea este stabila (autovehiculul nu oscileaza transversal), latimea fasiei de gabarit este constanta si egala cu dimensiunea de gabarit transversala. In realitate conducatorul auto nu poate conduce autovehiculul in mod ideal pe o linie dreapta; chiar si la deplasare rectilinie autovehiculul oscileaza transversal datorita diferitelor cauze (elasticitate laterala a pneurilor, presiune diferita in pneuri, vant lateral, denivelari ale drumului, erori de montaj etc), datorita carora latimea reala a fasiei de gabarit este mai mare decat cea teoretica si depinde in mare masura de viteza de deplasare a autovehiculului. La deplasarea autovehiculului in viraj latimea fasiei de gabarit este variabila in functie de caracterul miscarii, de unghiul de bracare al rotilor de directie, de viteza de rotire a volanului si de viteza de deplasare.
In cazul autovehiculului singular, razele de viraj exterioara si interioara se determina din schema prezentata in figura 1:
 (3)
(3)
Latimea fasiei de gabarit este data de rrelatia:
![]() (4)
(4)
Raza de viraj R (distanta dintre centrul O si centrul puntii spate) este:
![]() (5)
(5)
in care ![]() este unghiul mediu de bracare a rotilor de
directie.
este unghiul mediu de bracare a rotilor de
directie.
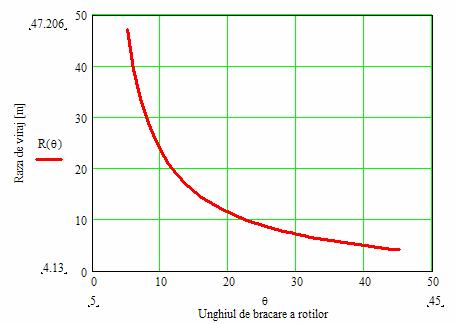
Fig. 2. Varitia razei de viraj a autovehiculului in functie de unghiul de
bracare a rotilor pentru o stare neutra de viraj
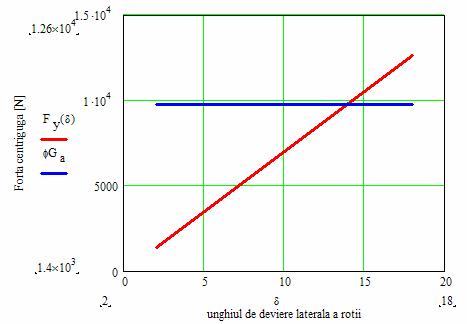
Fig. 3. Variatia forteicentrifuge in functie de unghiul de deviere laterala a rotii;
si forta centrifuga limitatsde aderenta.
Se poate observa in figura 3 ca in punctul in care forta centrifuga se intersecteaza cu limita de aderenta se obtine forta centrifuga maxima care poate actiona asupra autovehiculului fara ca acesta sa derapeze.
Pentru o deplasare cu viteza de 40 km h in trapta a IV-a de viteza forta care impinge autovehiculul are valoarea de 496 daN.m. Considerand ca autovehiculul se deplaseaza de un drum de asfalt in stare buna se poate determina valoarea limita a unghiului de bracaj pentru care rotile auovehiculului nu se vor deplasa lateral priln intersectia graficului fortei transversale cu limitarea de aderenta a drumului din figura 4.
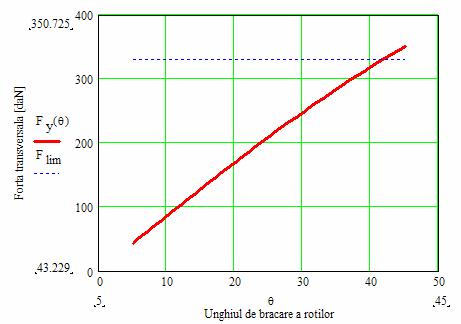
Fig. 4. Variatia fortei transversale pentru viteza de 40 km/h in
trepta a IV-a de viteza in functie de unghiul de bracaj al rotilor
1.Maniabilitatea in viraj a autovehiculului MERCEDES 509 CDI
Fig. 1. Forte care actioneaza in viraj asupra rotilor autovehiculului
Automobil cu bracarea rotilor din fata :
θ - unghiul de inclinare al rotilor de directie
La cele doua roti de directie actioneaza cate o forta de impingere, F paralela cu planul longitudinal de simetrie al autovehiculului si se descompune dupa componentele:
Fx = F cosθ - componenta in planul rotii
Fy = F sinθ - componenta perpendiculara pe planul rotii
Fx -tinde sa provoace rularea rotii, iar acesteia i se opune rezistenta la rulare X1
Fy - tinde sa provoace alunecarea transversala a rotii iar acesteia i se opune reactiunea transversala a drumului X1 asupra rotilor de directie
Conditia ca roata de directie sa ruleze fara patinare in directia virajului este:
Fx ≥ X1 ![]() F cosθ ≥ X1 (6)
F cosθ ≥ X1 (6)
Conditia ca roata de directie sa nu alunece in directie transversala este:
Fy ≤ Y1 , F = Fx/cosθ ![]() F sinθ = Y1
F sinθ = Y1 ![]() (Fx/cosθ) sinθ ≤ Y1
(Fx/cosθ) sinθ ≤ Y1
![]() Fx tg θ ≤ Y1 (7)
Fx tg θ ≤ Y1 (7)
X1 = f Z1 (8)
Conditia mentinerii directiei de mers in virajul dorit:
Y1 = φZ1 ![]() f Z1 tgθ ≤ φZ1
f Z1 tgθ ≤ φZ1
![]() tgθ ≤ φ/f (9)
tgθ ≤ φ/f (9)
Aceasta conditie asigura o deplasare stabila a autovehiculului pe calea de rulare si o buna maniabilitate . La deplasarea pe un drum deformabil si alunecos, datorita cresterii lui f si a scaderii lui φ rezulta unghi mare de bracare de unde rezulta o maniabilitate scazuta.
Din tabelul 5.1. se ia φ = 0,7 - pentru sosea de astfalt
Din tabelul 5.1. se ia f = 0,16 - pentru sosea de astfalt
tgθ ≤ φ/f (10)
θ ≤ arctgφ/f θ ≤ 77,12 º
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3997
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved