| CATEGORII DOCUMENTE |
| Bulgara | Ceha slovaca | Croata | Engleza | Estona | Finlandeza | Franceza |
| Germana | Italiana | Letona | Lituaniana | Maghiara | Olandeza | Poloneza |
| Sarba | Slovena | Spaniola | Suedeza | Turca | Ucraineana |
DOCUMENTE SIMILARE |
|
CELŠANAS MAŠÎNU MEHANISMI
Parastajam celšanas mašînam ir celšanas, braukšanas, grozîšanas un strçles izlaides maiňas mehanismi, kuri var bűt cieši saistîti ar celtňa metalkonstrukciju vai arî parvietojami attiecîba pret to.
1. Celšanas mehanisms
Celšanas mehanisms var bűt celšanas mašînas sastavdaďa var arî atsevišís agregats (celšanas skrűve, íçžu vilcçjs, tîtava, telfers u.c.). Celšanas mehanismus darbina ar roku vai ar dzinçju. Celšanas mehanisms, ko izmanto celšanas mašînas, sastav no dzinçja, bremzes, parvada, spoles, zvaigznîtes un trices.
|
|
|
|
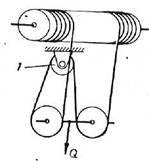
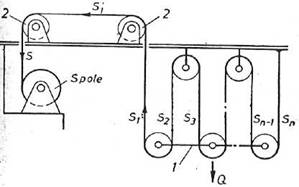
Trices. Par trici sauc ar lokanu elementu (trosi vai íçdi) saistîtu nekustîgo un kustîgo trîšu sistçmu, ko izmanto enerěijas komponentu (spçka un atruma) izmaiňai. Spçka palielinašanas trices, kuras izmanto visbiežak, pieder pie vienkaršakajiem un lçtakajiem parvadu veidiem. Lieto nesimetriskas un simetriskas trices. No nesimetriskas trices (1. zîm.) iziet un uz spoles uztinas tikai viens troses zars, no simetriskas trices (2. zîm.) – divi troses zari.
1. zîm. Nesimetriskas trices izklajums 2. zîm. Simetriska trice
1 – piekare; 2 - virzienmaiňas trîši 1 – izlîdzinašanas trîsis
Ja krava tikai piekarta pie nesimetriskas trices piekares 1 (1. zîm.), kravas svars vienadi noslogo visus troses zarus. Ceďot kravu, zari tiek noslogoti nevienadi, jo ir japarvar berze trîšu gultňos un troses locîšanas pretestîba. Vislielakais spçks S1 darbojas no trices izejošaja troses zara. Lai atrastu šo spçku, jauzraksta piekares 1 lîdzsvara vienadojums
Q = S1 + S2 + S3 + Sn-1 + Sn ,
kur n – troses zaru skaits, pie kuriem piekarta krava.
Atrodam sakarîbu starp spçkiem troses zaros, ievçrojot trîša lietderîbas koeficientu η:
S2 = S1 η; S3 = S2 η = S1 η 2; Sn-1 = S1 η n- 2; Sn = S1 η n -1.
Ievietojot šîs spçku izteiksmes iepriekšçja vienadojuma, iegűstam
Q = ( 1 + η + η2 + … + η n - 2 + η n - 1 ) S1.
Lielumu rinda iekavas ir dilstošas ěeometriskas progresijas summa. Tatad sakarîba starp spçku S1 un kravas svaru Q ir šada:
![]() . (1)
. (1)
Troses zara, kas uztinas uz spoles, darbojas spçks
![]()
kur z – arpus troses esošo virzienmaiňas trîšu 2 skaits. Tricei, kas attçlota 1. zîmçjuma, z = 2.
Trices lietderîbas koeficientu var izteikt ka attiecîbu starp lietderîga spçka darbu, kas bűtu japatçrç, velkot no trices izejošo troses zaru, ja nebűtu zudumu berzes un troses locîšanas pretestîbas dçď, un spçka S1 darbu, kura ietilpst arî šie zudumi. No trices izejoša troses zara parvietojumi abos gadîjumos ir vienadi, tadçď lietderîbas koeficientu var uzrakstît ka lietderîga spçka Q/n un faktiska troses galam pielikta spçka S1 attiecîbu:
![]() (2)
(2)
Ja krava iekarta divos troses zaros, t.i., piekart pie viena kustîga trîša, tad, parveidojot formulas (1) un (2), iegűstam
![]() un
un ![]()
Kravas celšanas laika, nesimetriskas trices troses zaram izejot no trices piekares, notiek piekares un kravas grozîšanas un šűpošanas. Lai to novçrstu un panaktu kravas vertikalu parvietojumu, lieto simetriskas trices (2.zîm.), kuras iegűst, paralçli savienojot divas nesimetriskas trices. Lai izlîdzinatu troses zaru garumu simetriskas trices abas pusçs, izmanto trîsi 1. Troses zaru skaits simetriskajai tricei ir divreiz lielaks neka atbilstošai nesimetriskajai tricei, tadçď troses diametru var samazinat. Lîdz ar to samazinas ari spoles diametrs, celšanas mehanisma parnesuma skaitlis un gabarîti. Lietojot simetrisko trici, palielinas spoles garums, jo uz tas uztinas divi troses zari.
Kravu ceďot un nolaižot, izlîdzinašanas trîsis 1 negriežas, tadçď trose uz šî trîša ir noslogota statiski un nolietojas mazak neka uz darba trîšiem vai spoles. Sakara ar to izlîdzinašanas trîsa diametru pçc normam var izvelçties mazaku: D1 = 0,6 D, (D – darba trîša vai spoles diametrs).
Lai atrastu sakarîbu starp spçkiem un lietderîbas koeficientu simetriskajai tricei, to sadala divas nesimetriskajas tricçs. Katrai nesimetriskajai tricei pielikts spçks 0,5Q. Lietderîbas koeficients simetriskajai tricei ir tads pats ka vienam tas paralçlajam nozarojumam, t.i., vienai nesimetriskajai tricei.
Parvadu mehanismi. Rotacijas kustîbas parvadîšanai celšanas mehanisma izmanto tiešas
saskares sazobes tipa parvadu mehanismus ( zobratu parvadus un gliemežparvadus). Parvadu mehanismiem ar lokanu elementu (siksnu, trosi vai íçdi) un berzes ratiem ir mazaka darba drošîba, tadçď tos parasti celšanas mehanismos nelieto.
Bremzes. Ar roku darbinama celšanas mehanisma, kura iebűvçts cilindrisku zobratu parvads, jalieto drošîbas kloíis vai automatiska skrűves bremze. Mehanisma, kura iebűvçts gliemežparvads, jalieto automatiska koniska bremze, kas ieslçdzas kravas svara ietekmç.
Ar dzinçju darbinamos celšanas mehanismos visbiežak lieto kustîbas apturçšanas bremzes (siekstu, lentas, disku bremzes), kuras ieslçdzas atsperes elastîbas spçka vai atsvara svara iedarbîbas rezultata.
|
|
|
|
Ari lieto kustîbas apturçšanas un automatisko skrűves bremzi. Kustîbas apturçšanas bremze, kura parasti novietota starp dzinçju un skrűves bremzi, paredzçta dzinçja rotora un citu pirmas varpstas rotçjošo masu kinçtiskas enerěijas uzňemšanai, pirmas varpstas kustîbas apturçšanai un skrűves bremzes ieslçgšanas paatrinašanai. Kustîbas apturçšanas bremze un dzinçja sajűgs parasti apvienoti viena kompakta mezgla (8 zîm. poz.2). Par bremzes skriemeli izmanto sajűga uzmavu parvada (reduktora) pusç. Šai gadîjuma darba drošîba ir lielaka, jo, sabojajoties sajűgam, nevar sakties kravas krišana. Lai samazinatu bremzes izmçrus, to novieto uz dzinçja varpstas. Lielaka darba drošîba gan ir bremzçm, kas savienoties ar spoli.
zîm. 4. zîm.
Ar roku darbinams celšanas mehanisms Ar dzinçju darbinams celšanas mehanisms
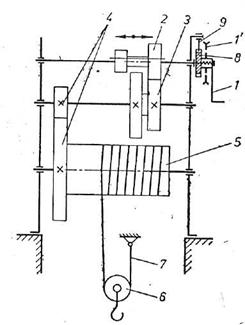
1 – rokas kloíis; 2 un 3 – zobratu bloki; 1 – dzinçjs; 2 – tapu sajűga-bremzes
4 – zobrati; 5 – spole; 6 – piekare; 7 – trose; mezgls; 3 – reduktors; 4 – zobu
8 – sprűdrats; 9 – sprűds; 1’-íçdesrats. sajűgs; 5 – spole; 6 – piekare;
7 – izlîdzinašanas trîsis.
Ar roku darbinams celšanas mehanisms ( zîm.). Šo mehanismu darbina ir rokas kloíi 1 vai íçdes ratu 1’. Izmantojot parbîdamu zobratu bloku 2, kas paredzçts spoles griešanas atruma maiňai, ciešo bloku 3 un zobratu 4, tiek griezta spole 5, uz kuras, celdama piekari 6, uztinas trose 7. Rokas kloíim 1 jabűt izveidotam ka drošîbas kloíim, t.i., kravu ceďot, jagriežas kopa ar varpstu un sprűdratu 8, kravu nolaižot, - kopa tikai ar varpstu (sprűdrata 8 kustîbu aptur sprűds 9 ). Ja celšanas mehanisms atrodas augstu virs telpas grîdas, rokas kloíi aizvieto ar íçdesratu.
Parvada lietderîbas koeficients
![]() (3)
(3)
kur M1 un M - griezes momenti uz pirmas varpstas un spoles varpstas;
ω1 un ω - kloía varpstas un spoles leňíiskie atrumi;
ηz un ηsp - zobratu para un spoles lietderîbas koeficienti (0,93…0,98).
Izmantojot vienadojumu (3), var atrast parvada parnesuma skaitli
![]() ,
,
kur i1 un i2 – atsevišío zobratu paru parnesuma skaitďi. Vçlams, lai viena zobrata para
parnesuma skaitlis nebűtu lielaks par 8…10.
Stradnieka attîstîtais griezes moments uz kloía varpstas ir M1 = P l,
kur P – spçks, ko stradnieks pieliek kloía rokturim; l - kloía garums.
Sakarîba starp spçku S1 troses zara, kas uztinas uz spoles, un ceďamas kravas svaru Q atrodama pçc formulas (2):
![]()
bet griezes moments uz spoles varpstas ir
![]()
kur D – spoles diametrs; itr – trices parnesuma skaitlis; ηtr –trices lietderîbas koeficients.
Kravas celšanas atrums ![]()
kur ω1 – kloía varpstas leňíiskais atrums; vk1 – kloía roktura aploces atrums.
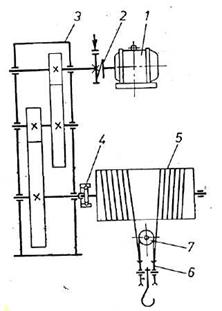
Ar dzinçju darbinams celšanas mehanisms (4. zîm.). Dzinçjs 1, izmantojot tapu sajűga-bremzes mezglu 2, reduktoru 3 un zobu sajűgu 4, parvada kustîbu uz spoli 5. Uz tas, celdama piekari 6, uztinas trose, kas novietota arî uz izlîdzinašanas trîša 7. Kravas piekaršanai izmantota simetriska trice, tadçď uz spoles uztinas divi troses zari. Izlîdzinašanas trîša uzdevums ir, nedaudz pagriežoties, likvidçt troses zaru garuma starpîbu trices abas pusçs.
Zîmçjuma paradîtajam celšanas mehanismam spoles varpstas gals atbalstîts no reduktora izejoša varpstas gala izvirpojuma. Šada konstrukcija ir ďoti kompakta, varpstas – statiski noteiktas. Celšanas mehanisma dzinçja statiskas jaudas aprçíinašanai var izmantot formulu
![]() ,
,
kur Q - kravas svars (N); v – celšanas atrums (m/min); η = ηr ηsp ηtr - mehanisma kopçjais lietderîbas koeficients; ηr ηsp ηtr – reduktora, spoles un trices lietderîbas koeficienti.
Dzinçju izvçlas, izmantojot tabulas. Pçc tam atrod celšanas mehanisma parvada parnesuma skaitli i = ω1/ ω = n1/ n, kur n1 un n – dzinçja varpstas un spoles griešanas atrumi.
2. Braukšanas mehanisms
|
|
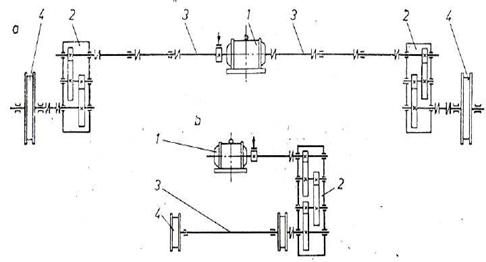
Braukšanas mehanisms parasti novietots uz celtňa vai ratiňiem un paredzçts to parvietošanai. Tilta celtňa un ta ratiňu braukšanas mehanismu biežak lietotas shçmas paradîtas 5. zîmçjuma. Ka celtňa, ta arî ratiňu braukšanas mehanisms sastav no elektrodzinçja 1, parvada, reduktora 2 un transmisijas 3, kas darbina dzenošos riteňus 4.
5. zîm. Braukšanas mehanismi
a – celtňa braukšanas mehanisms; b – ratiňu braukšanas mehanisms.
1 – elektrodzinçjs; 2 – reduktori; 3 – transmisija; 4 – dzenošie riteňi.
Atstatums starp celtňa dzenošajiem riteňiem (5.zîm.a) ir ievçrojami lielaks neka starp ratiňu dzenošajiem riteňiem (5.zîm.b), tadçď celtňa braukšanas mehanisma elektrodzinçjs japievieno pie transmisijas vidusdaďas. Elektrodzinçju nedrîkst pievienot pie celtňa transmisijas viena gala, jo šada gadîjuma, transmisijai savçrpjoties, no dzinçja talakais ritenis sava kustîba atpaliek no tuvaka riteňa un celtňa tilts uz sliedçm sagriežas šíîbi, ta radot priekšnoteikumus
celtňa avarijai. Telpas stradajošu celtňu un ratiňu parvietošanas parasti notiek pa horizontalu sliežu ceďu. Ir arî konstrukcijas, kuras celtňa dzenošos riteňus darbina divi sinhroni stradajoši elektrodzinçji, kuri novietoti katrs sava tilta gala. Šai gadîjuma transmisija nav nepieciešama.
|
|
Braukšanas pretestîba. Ka ratiňu, ta celtňa parvietošanos kavç berze riteňu gultňos, rites pretestîba riteňu un sliežu saskarvirsmas, riteňu apmaďu berze gar sliedçm, berze riteňu rumbu galos un berze, ko rada riteňu šíçrsslîde pa sliedçm.
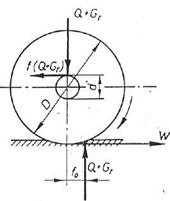
6.zim. Spçki, kas iedarbojas uz dzenošu riteňu varpstu
Kopçjo braukšanas pretestîbas momentu, kurš attîstas uz ratiňu dzenošo riteňu varpstas (6.zim.) un kurš ir japarvar , lai ratiňu parvietotos, var aprçíinat pçc formulas
![]() (5)
(5)
kur Q un Gr - attiecîgi kravas un ratiňu svars (N);
f - berzes koeficients riteňa gultni. Slîdgultňiem f = 0,1; ritgultňiem f = 0,01…0,02;
f0 - rites pretestîbas momenta plecs. Tçrauda ritenim uz sliedes f0 =0,0005…0,001(m).
d un D - varpstas kakliňa un riteňa diametrs (m);
W - ratiňu braukšanas pretestîba (N).
Formula ietilpstošais pirmais saskaitamais izsaka berzes pretestîbas momentu riteňu gultňos, otrais saskaitamais – rites pretestîbas momentu. Parçjos braukšanas pretestîbas faktorus precîzi aprçíinat neizdodas un to ietekmi parasti ievçro ar empîrisku koeficientu ξ. Slîdgultniem ξ = 1,3 … 1,5; ritgultňiem ξ = 2,0 … 2,5. Mazakas vçrtîbas attiecas uz ratiňiem, lielakas – uz celtni. Dalot vienadojuma (5) abas puses ar D/2, atrod ratiňu braukšanas pretestîbu
![]() (6)
(6)
Celtňa braukšanas pretestîbu aprçíina pçc analogas formulas
![]()
kur Gt - tilta svars (N);
ω - braukšanas pretestîbas koeficients. Ja celtňa balstišanai izmanto arî horizontalus rullîšus, braukšanas pretestîbu aprçíinot, jaňem vçra arî šo rullîšu kustîbas pretestîba.
Ar roku darbinams braukšanas mehanisms. Šadam mehanismam galvenais aprçíinamais lielums ir parvada parnesuma skaitlis, ko atrod analogi celšanas mehanisma parvada parnesuma skaitlim, izmantojot formulu
![]()
kur M - braukšanas pretestîbas moments (5);
M1 - stradnieka attîstîtais griezes moments uz kloía (íçdesrata) varpstas;
η p - parvada lietderîbas koeficients.
Ar dzinçju darbinams braukšanas mehanisms. Šadam mehanismam galvenie aprçíinamie lielumi
ir elektrodzinçja jauda un parvada parnesuma skaitlis.
Elektrodzinçja statiskas jaudas aprçíinašanai izmantot
formulu ![]()
kur W – ratiňu vai celtňa braukšanas pretestîba (N); v – braukšanas atrums (m/min.).
Tabulas atrod ne tikai dzinçja nominalo jaudu, bet arî šai jaudai atbilstošo dzinçja varpstas griešanas atrumu, ko nepieciešams zinat mehanisma parvada parnesuma skaitďa aprçíinašanai.
Braukšanas mehanisma bremzes aprçíins. Bremze nepieciešama ar dzinçju darbinamam ratiňu vai celtňa braukšanas mehanismam, kura braukšanas atrums parsniedz 30 m/min. Bremzei jaattîsta vienads bremzçšanas moments abos braukšanas virzienos un janodrošina atra un precîza ratiňu vai celtňa kustîbas apturçšana.
Bremzi var izvçlçties tikai tad, ja ir zinams bremzçšanas moments, kura lielums savukart atkarîgs no bremzçšanas ilguma. Lai atrastu minimalo bremzçšanas ilgumu, vispirms jaaprçíina maksimalais kustîbas palçninajums, kurš vçl neizraisa dzenošo riteňu izslîdçšanu. Maksimala kustîbas palçninajuma aprçíinašanai var izmantot formulu T + W n = P 1 ,
kur T - berzes spçks dzenošo riteňu un sliežu saskarvirsmas;
W n - nedzenošo riteňu kustîbas pretestîba, kuras aprçíinašanai izmanto formulu (6),
pieňemot, ka koeficients ξ = 1,0;
P 1 - ratiňu (celtňa) un kravas masas inerces spçks.
Ievietojot šaja formula attiecîgo lielumu izteiksmes, iegűstam vienadojumu
![]()
no kurienes ratiňu maksimalais kustîbas palçninajums
![]() (7)
(7)
Šo formulu var izmantot arî celtňa braukšanas mehanisma kustîbas palçninajuma aprçíinašanai. Kopçjais kustîbas apturçšanas moments, kurš sastav no bremzes attîstîta
bremzçšanas momenta un uz bremzes varpstu reducçta braukšanas pretestîbas momenta, lîdzsvaro uz bremzes varpstu iedarbojošos inerces spçku momentus. Sakarîba starp minçtajiem momentiem uzrakstama šadi M b + M / (i ηp) = M d1 + M d2 ,
kur M - braukšanas pretestîbas moments uz dzenošo riteňu varpstas. Momentu M aprçíina pçc formulas (5), pieňemot, ka koeficients ξ = 1,0;
M d1 - uz bremzes varpstu reducçtais ratiňu un kravas masas inerces spçku moments.
Bremzçjot
ratiňus, ![]()
M d2 - uz bremzes varpstu reducçtais braukšanas mehanisma rotçjošo masas inerces
spçku moments, kas atrodams tapat ka attiecîgais moments celšanas mehanismam.
Ievietojot formula inerces spçku momentu izteiksmes un parveidojot formulu, iegűstam
![]() (8)
(8)
Braukšanas mehanismiem, kurus darbina ar roku, n1 ir mazs, tapçc bremzçšanas moments var bűt vienads ar nulli vai mazaks par to. Bremze šai gadîjuma nav nepieciešama.
|
|
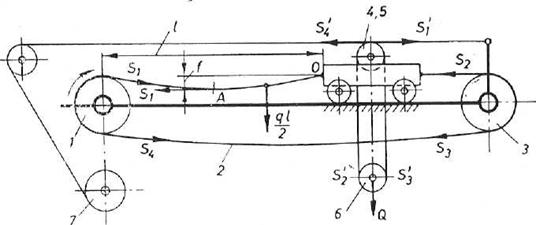
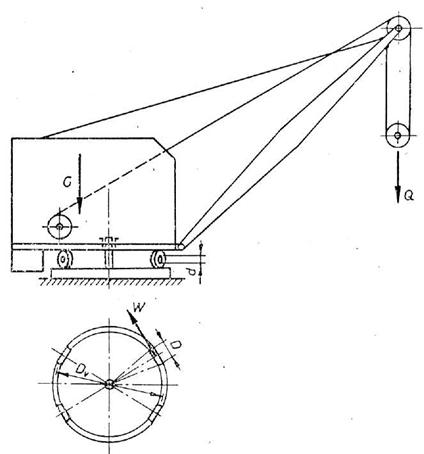
Ratiňu vilkšanas mehanisms. Grozamajos celtňos šis mehanisms novietots uz konsoles. Mehanismu un ratiňus savieno trose vai íçde, kura paredzçta ratiňu vilkšanai pa sliedçm, kas piestiprinatas pie konsoles. Šada ratiňu vilkšanas mehanisma principiala shçma paradîta 7. zîm.
7. zîm. Ratiňu vilkšanas mehanisma shçma
1 – dzenoša berzes spole; 2 – vilcçjtrose; 3 – virzienmaiňas trîsis;
4 un 5 – celšanas trices trîši; 6 – piekare; 7 – celšanas spole.
Elektrodzinçjs caur parvadu darbina berzes spoli 1, uz kuras uztîti vairaki vilcçjtroses 2 vijumi. Vilcçjtroses augšçjais zars punkta O piestiprinats pie ratiňu viena gala, bet apakšçjais zars, kas maina virzienu uz trîša 3, - pie ratiňu otra gala. Uz ratiňiem novietota celšanas mehanisma trice ar nekustîgajiem trîšiem 4 un 5 un piekari 6. Ratiňu parvietošanos kavç spçks
S1, kas darbojas no spoles 1 noskrejošaja vilcçjtroses zara, ratiňu braukšanas pretestîba W, ka arî no celšanas trices izejošaja troses zara un tricç ieejošaja troses zara darbojošos spçku starpîba S’4 - S’1. Spçks S1 atkarîgs no vilcçjtroses pašsvara un troses nokares f. Lai atrastu S1, vilcçjtroses augšçjais zars iedomati japaršíeď punkta A. Atšíeltajam vilcçjtroses galam šaja šíçluma japieliek lîdzsvarojošais spçks S1 un jauzraksta lîdzsvara momentu vienadojums attiecîba pret punktu O: S1 f – ql2/ 8 = 0, kur q – vilcçjtroses 1 metra svars.
Tatad vilcçjtroses augšçja zara maksimalais sastiepuma spçks S1= ql2/ 8f.
Lai atrastu spçku starpîbu S’4 - S’1, jauzraksta celšanas trices piekare 6 lîdzsvara vienadojums S’2 + S’3 = Q.
Spçkus S’2 un S’3 var izteikt ar S’1, t.i., S’2 = S’1/η; S’3 = S’2/η = S’1/η2,
kur η – trîša lietderîbas koeficients (η= 0,95 … 0,98).
Ievietojot atrastas spçku izteiksmes lîdzsvara vienadojuma, iegűstam
![]() (9)
(9)
Ka jau minçts, kopçjais ratiňu parvietošanai nepieciešamais spçks ir
S2 = S1 + W + S’4 - S’1.
Spçks, kas japieliek uz spoles 1 uzskrejošajam vilcçjtroses zaram, savukart ir
S4 = S3 = S2/η = ( S1 + W + S’4 - S’1) / η. (10)
Griezes momentu, kas dzinçjam jaattîsta uz spoles varpstas un dzinçja nepieciešama jauda, aprçíina pçc formulas
![]()
kur ω un n - spoles leňíiskais atrums un griešanas atrums;
η - lietderîbas koeficients parvadam no dzinçja uz spoli 1.
Lai trose un spoles neslîdçtu, jabűt izpildîtam nosacîjumam S4 ≤ S4 max = S1 min e f α ,
kur S1 min – vilcçjtroses augšçja zara minimalais sastiepuma spçks (ratiňi atrodas kreisa stavokli);
f - berzes koeficients spoles un troses saskarvirsma (f=0,13);
α - troses vijumu kopçjais aptveres leňíis (rad);
S4 max - maksimalais troses vilkšanas spçks, kadu iespçjams nodrošinat ar berzes spoli, ja
troses minimalais sastiepuma spçks ir S1 min.
Kravas celšanas laika spoli cenšas pagriezt moments
M ’= [( S1 + W + S’4 - S’1) η - S1]D/2.
Lai lîdzsvarotu momentu M ’, parvada jaiebűvç bremze. Ja bremzi novieto uz parvada pirmas varpstas, nepieciešamais bremzçšanas moments Mb =β M ’ηp ηsp / i ,
kur β – bremzes drošîbas koeficients ( β ≥ 1,2).
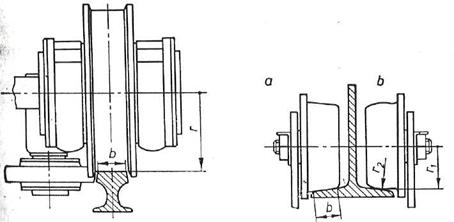
Riteňi. Riteňos parasti izgatavo no tçrauda, tiem var bűt cilindriska, koniska vai mucveida forma. Ja riteňi paredzçti ne tikai parvietojuma objekta atbalstîšanai uz sliedçm, bet arî kustîbas vadîšanai, tos izgatavo ar vienu vai divam apmalçm. Riteňus ar vienu apmali var izmantot tikai celtňiem, kuri parvietojas pa virszemes sliežu ceďu, pie tam atstatums starp sliedçm nav lielaka par 4 m un abas sliedes atrodas viena lîmenî.
Riteňu aploka saskare ar sliedi var notikt pa lîniju (8. zîm., 9. zîm. a) vai arî viena punkta (9. zîm. b). Ja saskare notiek punkta, maksimalie kontaktspriegumi
![]()
Ja
saskare notiek pa lîniju 
|
|
Šajas
formulas: α un k1 - koeficienti, kuri atkarîgi no
attiecîbas rmin / rmax ; rmin un rmax - minimalais un maksimalais radiuss r1 vai r2 (88. zîm); k2
– koeficients, kurš atkarîgs no darbîbas režîma; P - aprçíina
spçks; ![]() - reducçtais
elastîbas modulis; E =E1 =E2 =
2,1∙105 (N/mm2); r un
b – riteňa radiuss un
kontaktlînijas garums (mm).
- reducçtais
elastîbas modulis; E =E1 =E2 =
2,1∙105 (N/mm2); r un
b – riteňa radiuss un
kontaktlînijas garums (mm).
8. Cilindrisks ritenis ar divam 9. Piekarto ratiňu riteňi
apmalçm un horizontalu vadrullîti a – konisks, b – mucveida riteni
Pieďaujama kontaktsprieguma [σk] aprçíinam var izmantot formulu
[σk] ≈ (2,3 … 3,0) HB ![]() ( N / mm2),
( N / mm2),
kur HB - riteňa aploka virskartas cietîbas pçc Brinela;
N = N1 + N2 ( P2 /P1 )3 + … + Nn ( Pn /P1)3 - reducçtais riteňa apgriezienu skaits
(spriegumu ciklu skaits) riteňa darbműža; N1, N2,…, Nn – spiediena spçkiem P1, P2,…,Pn atbilstošie riteňa apgriezienu skaiti.
Laika, kad uz riteni iedarbojas maksimalais spiediena spçks P1, izdarîto apgriezienu skaits
N1 = (z s h1) / π D, kur z - braukšanas mehanisma darbîbas ciklu skaits stunda; s - riteňa parvietojums viena cikla laika; D - riteňa diametrs; h1 - spiediena spçkam P1 atbilstošais braukšanas mehanisma darbîbas ilgums (stundas).
Grozîšanas mehanisms
Nelielas celtspçjas grozamos celtňus var grozît ar roku, šim nolűkam izmantojot pie strçles gala piestiprinatu metinato íçdi vai trosi. Lielakas celtspçjas celtňos izmanto grozîšanas mehanismus, kurus darbina ar roku vai ar dzinçju. Grozîšanas mehanismus ierîko dažadu
konstrukciju grozamajiem konsoles un strçles celtňiem. Šie celtňi var bűt ar grozamu kolonnu vai grozamu platformu.
|
|
Grozîšanas mehanisms parasti sastav no gliemežparvada un zobratu parvada, ko darbina dzinçjs. Lai varçtu veikt grozîšanas mehanisma aprçíinu, jazina celtňa grozîšanas pretestîbas moments, kurs vislielako vçrtîbu iegűst tad, ja celtnim ir piekarta krava.
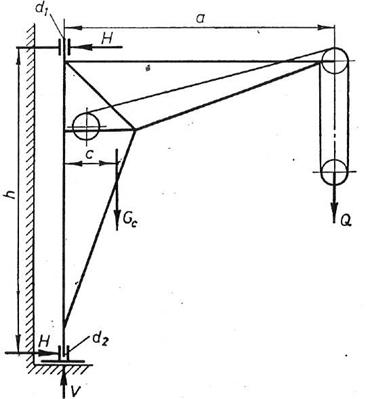
10. zîm. Spçki, kas iedarbojas uz celtni ar grozamu kolonnu
Gultňu reakcijas un celtňa grozîšanas pretestîbas moments. Celtnim ar grozamu kolonnu
(10. zîm.) kolonna ir celtňa metalkonstrukcija sastavdaďa. Kolonnas galos ir tapas, ar kuram ta
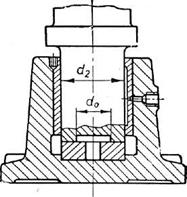
atbalstas gultňos. Augšçjais gultnis ir radialais gultnis, bet apakšçjais (11.zîm.) – radiali aksialais gultnis.
|
|
11. zîm. Grozama kolonnas apakšçjas tapas iegultňojums
Augšçja un apakšçja gultňa horizontala reakcija
![]() (N),
(N),
kur Q un Gc - kravas un celtňa svars;
a un c - attiecîgi kravas un celtňa smaguma centra atstatums no griešanas ass;
h - atstatums starp gultňiem.
Apakšçja gultňa vertikala reakcija V = Q + Gc.
Celtňa grozîšanas pretestîbas momentu attiecîba pret griešanas asi aprçíina, ievçrojot berzi augšçja un apakšçja gultnî:
M = f H d1/2 + f H d2/2 + f V dv/2,
kur f - slîdes (rites) berzes koeficients;
d1 un d2 - kolonna augšçjas un apakšçjas tapas diametri;
dv - kolonna pçdas vidçjais diametrs.
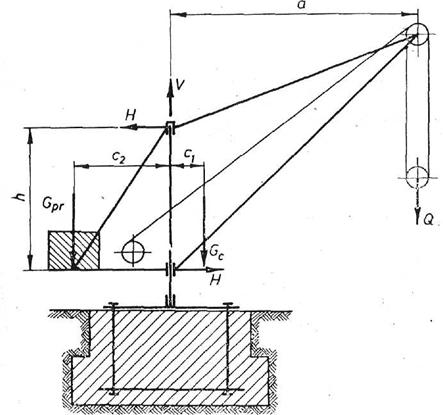
Celtnis ar nekustîgu kolonnu (12. zîm.) ir piekarts kolonnai augšçja gultnî un atbalstas pret kolonnu apakšçja gultnî. Augšçjais gultnis piemçrots vertikalu un horizontalu spçku uzňemšanai. Apakšçjais gultnis, kas pret kolonnu atbalstas ar diviem rullîšiem, spçj uzňemt vienîgi horizontalus spçkus.
Apakšçja un augšçja gultňa horizontala reakcija H = ( Qa + Gcc1 – Gpr c2)/ h,
kur c1 - celtňa smaguma centra atstatums no griešanas ass;
Gpr un c2 - pretsvara svars un pretsvara smaguma centra atstatums no griešanas ass.
Augšçja gultňa vertikala reakcija V = Q + Gc + Gpr.
Berzes pretestîbas moments augšçja gultnî (1 zîm.) ir M1 = f H d1 /2 + f V dv /2,
kur dv - aksiala gultňa gredzena vidçjais diametrs.
Apakšçjais gultnis var bűt karba ar četriem rullîšiem (14. zîm.). Ja celtnim piekarta krava, pie kolonnas piespiežas divi kravas pusç esošie rullîši. Ja kravas nav, pretsvars cenšas gazt celtni pretçja virziena un pie kolonnas piespiežas divi pretsvara pusç esošie rullîši.
Celtnim ar piekartu kravu rullîšu kustîbas
pretestîba ![]()
kur N - spçks, ar kadu rullîtis piespiežas pie kolonnas;
d un D - rullîša ass un rullîša diametri; f - berzes koeficients rullîša gultni;
f0 - rites pretestîbas momenta plecs.
|
|
|
|
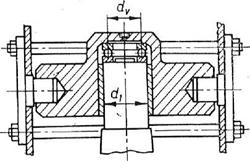
12. Spçki, kas iedarbojas uz celtni ar nekustîgu kolonnu
1 Augšçja gultňa izveidojums celtnim ar nekustîgu kolonnu
|
|
14. zîm. Apakšçja gultňa izveidojums celtnim ar nekustîgu kolonnu
Apakšçja gultňa kustîbas pretestîbas moments
![]()
kur d2 - kolonnas diametrs; H – gultňa horizontala reakcija;
α – leňíis starp gultňa karbas asi un spçka N darbîbas lîniju.
Kopçjais celtňa grozîšanas pretestîbas moments attiecîba pret kolonnas asi ir
![]()
Gultňos, kuru celtspçja ir liela, izmanto apakšçjos gultňus ar rullîšu gredzenu. Gultnim ar rullîšu gredzenu ir lielaki gabarîti (nepieciešams arçjais gredzens), toties mazaka kustîbas pretestîba, jo nav berzes starp rullîšiem un to asîm.
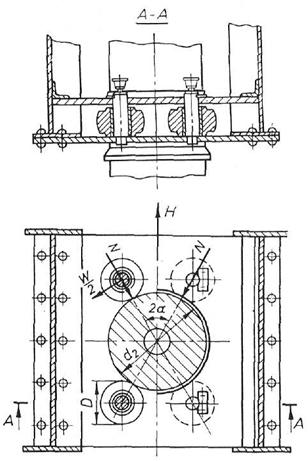
Celtnim ar grozamu platformu uz rullîšiem (15. zîm.) gredzenveida sliedes iekšpusç vai arpusç ir zobu vainags, pa kuru, celtni griežot, noveďas grozîšanas mehanisma mazais zobrats.
Celtňa grozîšanas pretestîbas moments, ja rullîši atbalstas uz asîm, ir
|
|
kur W - rullîšu kustîbas pretestîba; ξ – koeficients, kurš raksturo pretestîbu, ko rada rullîšu apmaďu berze gar sliedi, berze rullîšu galos un rullîšu šíçrsslîde pa sliedi. Parasti ξ = 1,5…3,0. G – celtňa un pretsvara kopçjais svars; Dv – gredzenveida sliedes vidçjais diametrs.
15. Spçki, kas darbojas uz celtni ar grozamu platformu
Aprçíinot grozîšanas pretestîbas momentu arpus telpam stradajošiem celtňiem, jaňem vçra arî tas, ka vçja spiediena spçks var kavçt kravas un strçles pagriešanos.
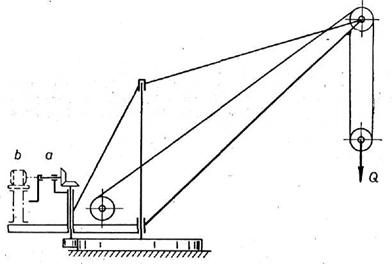
Ar dzinçju darbinams grozîšanas mehanisms. Celtňiem, kuru grozîšanas mehanismu darbina ar dzinçju, rokas kloía vieta ir elektrodzinçjs (16.zîm.). Griešanas atrums 2-3 apgr./min.
Dzinçja statiska jauda, kas nepieciešama celtňa grozîšanas pretestîbas parvarçšanai, ir
![]() (kW),
(kW),
kur M - grozîšanas pretestîbas moments attiecîba pret celtňa griešanas asi;
ω un n - celtňa strçles leňíiskais atrums un griešanas atrums (apgr./min.).
Izvçloties grozîšanas mehanismu dzinçju, jaňem vçra arî iekustinamo masu inerce, kas var bűt ďoti liela. Lai aprçíinatu inerces spçkus, jazina iekustinašanas ilgums, ko nosaka strçles pagrieziena leňíis iekustinašanas laika.
|
|
16. zîm. Celtňa grozîšanas mehanisma darbinašanas veids
a – ar rokas kloíi; b – ar elektrodzinçju
Grozîšanas mehanisma bremzes aprçíins. Kustîbas apturçšanas laika bremzes attîstîtais bremzçšanas moments un uz bremzes varpstu reducçtais celtňa grozîšanas pretestîbas moments lîdzsvaro uz šo pašu varpstu reducçtos inerces spçku momentus, t.i.,
Mb + M1 = M d1 + M d2.
Nepieciešamais bremzçšanas moments
![]()
kur tb – bremzçšanas ilgums, ko var aprçíinat pçc formulas.
4. Strçles izlaides maiňas mehanisms
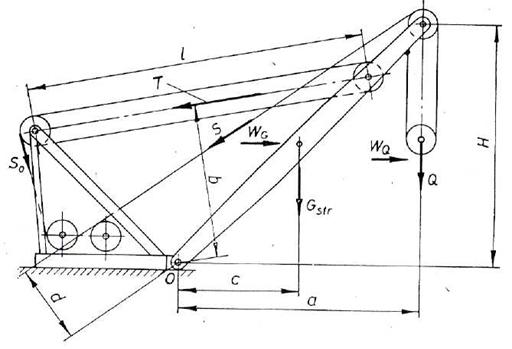
Strçles izlaides maiňu var realizçt, parvietojot ratiňus pa celtňa konsoli vai arî paceďot un nolaižot strçli. Aplűkosim strçles izlaides maiňas mehanismu (17. zîm.), kura strçles pacelšanai un nolaišanai izmanto troses trici (šim nolűkam var izmantot arî skrűves vai stieňu mehanismus).
Strçles celšanas trosei ar nemainîgu atrumu uztinoties uz spoles, strçles izlaides maiňas atrums ir mainîgs. Lai aprçíinatu strçles izlaides maiňas mehanisma dzinçju jaudu, vispirms janosaka spçks S0 troses zara, kas uztinas uz spoles S0 = T / itr ηtr , kur Ti - spçks, kas darbojas tricç; ηtr – trices lietderîbas koeficients.
Spçku T savukart aprçíina, ievçrojot visus uz strçli iedarbojošos spçkus un sastadot spçku momentu vienadojumu attiecîba pret asi, kas iet caur punktu O. Šo vienadojumu sastada gadîjumam, kad strçles izlaide ir maksimala, tad spçks T ir vislielakais. No iegűta vienadojuma
Q a + Gstr c + WGH / 2 + WQ H – S d - T b = 0
var izteikt spçku T:
Šajas formulas Q un Gstr – kravas un strçles svars; WG un WQ – vçja spiediena spçki uz strçli un kravu; S – spçks kravas celšanas trose.
Zinot spçku So strçles celšanas trosç, var aprçíinat un izvçlçties trosi, noteikt spoles diametru D un aprçíinat griezes momentu uz spoles varpstas: M = So D/ 2 (N∙m).
Dzinçja statiska jauda, kas atbilst maksimalajai strçles izlaidei, ir
![]() (kW),
(kW),
kur ηsp un ηp - spoles un parvada lietderîbas koeficienti;
n - spoles griešanas atrums, n = v / πD;
v - atrums, ar kadu trose uztinas uz spoles.
|
|
Aprçíinot strçles izlaides maiňas mehanismu mobiliem celtňiem, jaňem vçra arî apvidus slîpums, jo, celtnim sasveroties, strçles izlaide un spçks tricç var palielinaties. Aprçíinot iekustinašanas un bremzçšanas momentus, jaievçro ne tikai kravas un strçles vertikalie inerces spçki, bet arî horizontalie centrbçdzes spçki, kas uz kravu un strçli iedarbojas platformas grozîšanas laika.
17. zîm. Spçki, kas iedarbojas uz strçles izlaides maiňas mehanismu
5. Stacionaro grozamo celtňu stabilitates parbaude
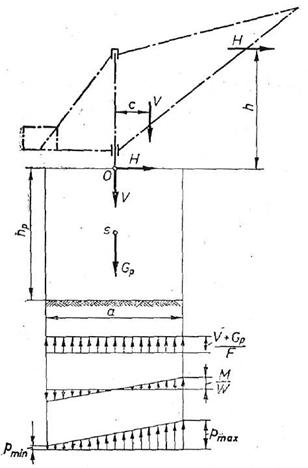
Stabilitates parbaude jaizdara visos gadîjumos, kad uz celtni arpus ta atbalsta kontűras iedarbojas spçki, kas cenšas celtni apgazt. Šo spçku radîto gazçjmomentu lîdzsvaro noturmoments. Stacionariem celtňiem noturmoments ir atbalsta kontűras robežas vai arpus tam atrodošas konstrukciju elementu svara radîtais pretdarbîbas moments vai arî celtňa balstelementu (atsaišu) reakcijas spçku moments. Ja balstelementu mehaniska stiprîba ir pietiekama, celtňa stabilitate ir nodrošinata. Gazçjmomentu apvidű parvietojamiem celtňiem var lîdzsvarot ar celtňa vai pretsvara svara radîto noturmomentu. Nereti izmanto arî arpus celtňa gabarîtiem izvietojamus balstus.
Stabilitate japarbauda brîvi stavošiem celtňiem ar grozamu platformu, ka arî celtňiem ar nekustîgu kolonnu, kura, izmantojot atbalstplatni, piestiprinata pie celtňa pamata. Celtňa stabilitate atkarîga tikai no pamata izmçriem un masas. Pamatu, kuram parasti ir taisnstűra paralçlskaldňa forma, izgatavo no betona, retak no íieěeďiem vai laukakmeňiem.
|
|
18. zîm. Spçki, kas iedarbojas uz celtňa pamatu
Visparîga gadîjuma no celtňa uz pamatu (18. zîm.) iedarbojas punkta O parnestie spçki – vertikalais rezultçjošais spçks V un horizontalais rezultçjošais spçks H, ka arî šo spçku kopçjais moments M1 attiecîba pret punktu O ( moments M1 = V c + H h). Vertikalo spçku V rada kravas un celtňa svars, ka arî vertikalais inerces spçks, horizontalo spçku H - vçja spiediena spçks un horizontalie inerces spçki. Stabilitates parbaudç jaňem vçra arî celtňa pamata svars, bet atsevišíos gadîjumos – nevienadais grunts spiediens uz pamata sanu skaldnçm. Pamata svars Gp = γ hp F , kur γ - pamata materiala îpatnçjais svars; hp – pamata augstums, kuram jabűt ne mazakam par salstošas grunts virskartas biezumu (parasti hp = 1,2 … 2 m); F - pamata apakšçjas skaldnes laukums.
Pamata svaram jabűt tadam, lai horizontalais spçks H nevarçtu pamatu parbîdît pa grunti. Parbaudot celtňa stabilitati, aprçíina maksimalos virsmas spiedes spriegums celtňa pamata apakšçjas skaldnes un grunts saskarvirsma. Šiem spriegumiem jabűt mazakiem par pieďaujamo vçrtîbu. Bez tam janosaka, vai saskarvirsma nerodas negatîvi virsmas spiedes spriegumi, kuru rezultata samazinas darbîgais virsmas laukums. Samazinoties saskarvismas laukumam un palielinoties virsmas spiedes spriegumiem, grunts zem celtňa pamata var neizturçt un celtnis var apgazties. Parasti pieňem, ka uz pamata sanu skaldnçm grunts spiediena spçki neiedarbojas un ka pamata apakšçjas skaldnes un grunts saskarvirsma virsmas spiedes spriegumi mainas lineari.
Maksimalos virsmas spiedes spriegumus, kas attîstas
pie pamata sanu šíautnes, aprçíina pçc formulas ![]()
kur M - gazçjmoments, kas iedarbojas uz pamatu, M = M1 + H hp ;
W - pamata apakšçjas skaldnes laukuma aksialais pretestîbas moments. Kvadratam W=a3/6.
F - apakšçjas skaldnes laukums. Kvadratam F= a2.
Minimalajiem virsmas spiedes spriegumiem jabűt lielakiem par nulli, t. i.,
![]()
Parveidojot nevienadîbu, atrodam, ka šis
nosacîjums tiek izpildîts, ja ![]()
Var pieňemt šadas gruntij pieďaujama virsmas spiedes sprieguma vçrtîbas: granîtam – 3 … 4 N/mm2, kaďíakmenim – 1,5 … 2,5 N/mm2, sausam smiltîm un malam – 0,3 N/mm2.
Lai spçka H ietekmç celtňa pamats neslîdçtu pa grunti, jabűt izpildîtam nosacîjumam
k H ≤ f ( V + Gp),
kur k - drošîbas koeficients: 1,5 … 1,7; f - slîdes berzes koeficients: 0,5 … 0,7.
Izmantojot šo nosacîjumu, var aprçíinat
minimalo celtňa pamata svaru ![]()
Celtňiem ar grozamu platformu jabűt izpildîtai arî prasîbai, lai vertikalais rezultçjošais spçks V darbotos gredzenveida sliedes iekšpusç. Horizontala spçka H radîta gazçjmomenta lîdzsvarošanai paredzçta centrala tapa.
6. Vienkaršie celšanas mehanismi
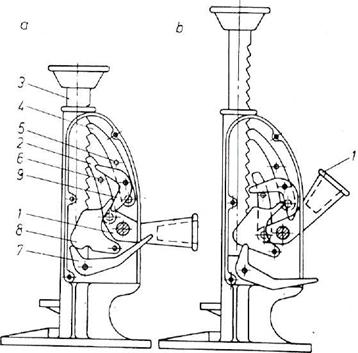
Sviru-zobstieňa domkrati. Izmanto remonta darbiem, ja celtspçja neparsniedz 100 kN.
|
|
Lai paceltu kravu (19. zîm. a), stradniekam japarvieto svira 1 uz leju. Tad domkrata karba esošais sviras gals ar tam šarnirveida piestiprinato sprűdu 2 parvietojas uz augšu un ceď zobstieni 3 un kravu. Sviru 1 parvietojot uz augšu, sprűds 2 noslîd uz leju un nonak sazobç ar kadu zemaku zobstieňa zobu. Zobstienu pacelta stavoklî notur pie domkrata karbas piestiprinatais sprűds 4. Abus sprűdus pie zobstieňa piespiež atsperes, kas iedarbojas uz sprűdu tapiňam 5 un 6. Svarstot sviru 1, var panakt periodisku zobstieňa un kravas celšanu.
19. zîm. Sviru-zobstieňa domkrats: a - celšana; b – nolaišana
1, 7, 8 un 9 – sviras; 2 un 4 – sprűdi; 3 – zobstienis; 5 un 6 – tapiňas
Lai zobstieni nolaistu (19. zîm. b), no ta jaatvirza sprűds 2. To panak, nospiežot uz leju sviru 7. Ta rezultata pagriežas sviras 8 un 9. Svira 9 spiež uz sprűda tapiňu 6 un, parvarot atsperes pretestîbu, atvirza sprűdu 2 no zobstieňa. Ja pçc tam stradnieks spiež sviru uz leju, sprűds 2 parvietojas uz augšu, pagriež sviru 9 un, noslîdot no tas, nonak sazobç ar zobstieni augstaka punkta neka iepriekš. Taja paša laika svira 9, griežoties ap sviru 8, atvirza no zobstieňa sprűdu 4. Ja stradnieks ceď sviru 1 uz augšu, sprűds 2 kopa ar zobstieni 3 nolaižas. Ka redzams, svarstot svîru 1, iespçjams realizçt periodisku zobstieňa nolaišanu.
Sviru-zobstieňa domkratam ir augsts lietderîbas koeficients ( η = 0,95 …0,97), turpretî darba drošîba nav liela, jo kravas nolaišanas laika, sprűdiem izejot no sazobes, notiek îslaicîga un periodiska kravas krišana.
|
|
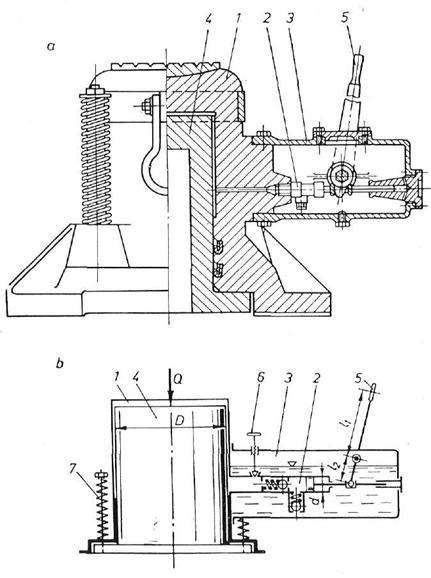
Hidrauliskie domkrati. Hidrauliskajiem domkratiem raksturîgi mazi gabarîti, liela celtspçja un samçra augsts lietderîbas koeficients ( η = 0,75…0,8). Šos domkratus var sarežěîtos un precîzos montažas darbos. Hidrauliskie domkrati ir pašbremzçjoši un droši darbîba, tos
darbina ar roku vai ar dzinçju.
20. zîm. Hidrauliskais domkrats: a – domkrats; b – kinematiska shçma
1 – cilindrs, 2 – sűknis, 3 – šíidruma rezervuars, 4 – virzulis,
5 – svira, 6 – izplűdes varsts, 7 - atspere
Kravas celšanai (20. zîm.) izmanto cilindru 1, kas kopa ar sűkňi 2 un šíidruma rezervuaru 3 parvietojas attiecîba pret virzuli 4. Sűkňa darbinašanai lieto rokas sviru 5. Lai kravu nolaistu, jaatver izplűdes varsts 6. Tad kravas un cilindra svara, ka arî četru saspiesto atspçru 7 elastîbas spçku iedarbîbas rezultata, šíidrums no cilindra 1 tiek izspiests rezervuara
Ar šo domkratu iespçjama arî kravas pakapeniska celšana arvien lielaka augstuma. Lai to
izdarîtu, pçc tam kad cilindrs pacelts, zem ta paliek koka klučus un atver varstu 6. Atsperu 7 iedarbîbas rezultata šíidrums tiek izspiests rezervuara – virzulis 4 parvietojas uz augšu. Ar to noslçdzas pirmais darbîbas cikls. Lai varçtu turpinat celšanu, zem virzuďa japaliek koka kluči un cikls jaatkarto, kamçr tiek sasniegts vçlamais celšanas augstums.
Spçks, ar kadu stradniekam jaiedarbojas
uz domkrata sviras galu, ir ![]() , kur l1 un l2 - domkrata sviras garakais un
îsakais plecs;
, kur l1 un l2 - domkrata sviras garakais un
îsakais plecs;
d un D – sűkňa un domkrata virzuďu diametri;
η - domkrata lietderîbas koeficients;
Q - ceďamas kravas svars.
Hidraulisko domkratu celtspçja parasti ir 30…2000 kN. Lai paceltu ďoti smagu kravu, jalieto vairaki domkrati, kuru darbinašanai var izmantot vienu centralu sűkni.
Tîtavas. Tîtavas izmanto kravas celšanai vai vilkšanai. Tam ir viena vai vairakas spoles, uz kuriem uztin lokanu elementi - trosi vai íçdi. Tîtavas var bűt pastavîgi celšanas mehanismi vai arî komplicçtu celšanas mašînu sastavdaďa. Tas var darbinat ar roku vai ar dzinçju.
|
|
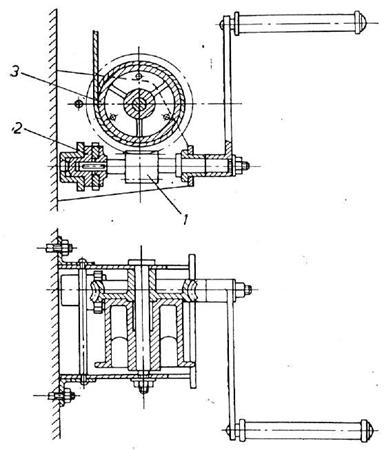
20. zîm. Pie sienas piestiprinama tîtava
1 - gliemežparvads; 2 – bremze; 3 - spole
Ar roku darbinama nelielas celtspçjas tîtava, ko piestiprina pie sienas un izmanto montažas un remonta darbos, paradîta 20. zîmçjuma.
Lai novçrstu nelaimes gadîjumus, tîtavas lieto drošîbas kloíus vai automatiskas skrűves bremzes. Tîtavas, ko izmanto kravas celšanai, lai panaktu lielaku darba drošîbu, izmanto tiešas saskares sazobes tipa parvadus.
7. Vilcçji
Vilcçjus iedala ar roku darbinamos vilcçjos un ar dzinçju darbinamos vilcçjos – telferos.
Ar roku darbinami íçžu vai trošu vilcçji. Šie vilcçji ir stacionari vai parvietojami kompakti celšanas mehanismi ar gliemežparvadu vai zobratu parvadu. Vilcçjiem ar zobratu parvadu celtspçja ir 0,25 … 100kN, bet vilcçjiem ar gliemežparvadu zobratu – 1 … 100 kN.
|
|
Ar roku darbinamus vilcçjus izmanto mehaniskajos cehos, remonta un montažas cehos smagu detaďu celšanai, ka arî transportçšanai horizontala virziena. Otraja gadîjuma virs darba vietam, kur paredzama smagu detaďu celšana un transportçšana, telpas konstrukcijai piestiprina dubult – T profila siju, kuras apakšçjo plauktu izmanto vilcçja ratiňu atbalstîšanai. Ratiňus parbîda stradnieks.
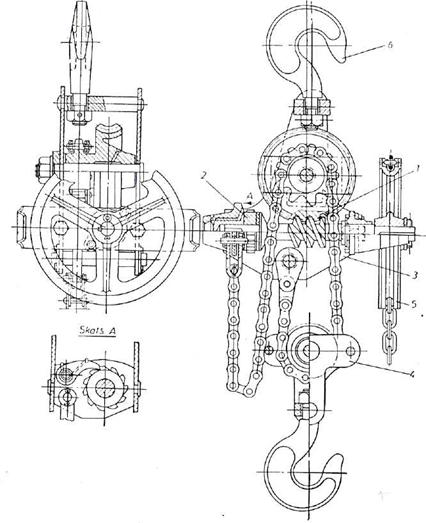
21. zîm. Íçžu vilcçjs ar gliemežparvadu
1- gliemežparvads; 2 – bremze; 3 – karba; 5 – íçdesrats; 6 – kasis.
Íçžu vilcçjs ar gliemežparvadu (21. zîm.) sastav no divgajienu gliemežparvada 1, kurš nav pašbremzçjošs, automatiskas disku bremzes 2, kas ieslçdzas kravas svara iedarbîbas rezultata, karbas 3 un piekares 4. Vilcçja darbinašanai izmanto íçdesratu 5 un metinato íçdi, bet kravas piekaršanai – plaksnîšu íçdi vai arî kalibrçtu metinato íçdi. Kasis 6 paredzçts vilcçja piekaršanai virs darba vietas vai pie ratiňiem.
|
|
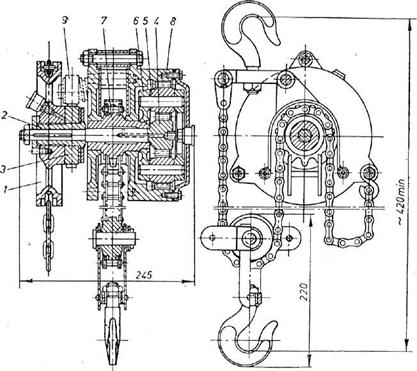
Íçžu vilcçjs ar planetaro zobratu parvadu paradîts 22. zîmçjuma. Šim vilcçjam ir kompaktaka konstrukcija neka vilcçjiem ar parasto zobratu parvadu un ievçrojami augstaks lietderîbas koeficients neka vilcçjiem ar gliemežparvadu.
22. zîm. Íçžu vilcçjs ar gliemežparvadu
1- íçdesrats; 2 – čaula; 3 – sprűdrats; 4 – varpsta-zobrats; 5 – satelîts;
6 – vadîkla; 7 – kravas zvaigznîte; 8 – karbas zobrats; 9 – sprűds.
Sakot kravas celšanu, íçdesrats 1 parvietojas pa čaulas 2 vîtni un piespiež sprűdratu 3 pie čaulas atloka. Tada veida visi minçtie elementi tiek saistîti ar centralo varpstu – zobratu 4. Pçc tam kustîba no íçdesrata 1 tiek parvadîta uz varpstu – zobratu 4, satelîtiem 5, vadîklu 6 un kravas zvaigznîti 7, kas griežas kravas celšanai atbilstoša virziena. Ja celšanu partrauc, kustîbu pretçja virziena kavç sprűds 9, kas atrodas sazobç ar sprűdratu.
Lai kravu nolaistu, íçdesrats 1 jagriež kravas nolaišanai atbilstoša virziena. Tad íçdesrats, skrűvçdamies pa čaulas 2 vîtni, atvirzas no sprűdrata, t.i., izzűd berze starp sprűdratu un íçdesrata rumbu, ka arî starp sprűdratu un čaulas atloku. Atbrîvota varpsta kravas svara ietekmç griežas ar tadu atrumu, ar kadu tiek griezts íçdesrats.
Telferi. Telferi ir vilcçji, kurus darbina dzinçjs. Telferi lieto gan ka patstavîgus celšanas mehanismus, gan arî ka konsoles, tilta un citu celtňu sastavdaďu. Telferiem celtspçja lîdz 50 kH. Šiem telferiem ir ievçrojami mazaki gabarîti un svars. Elektrodzinçja stators iepresçts spoles korpusa, lîdz ar to uzlabojas arî dzesçšanas apstakďi.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 4682
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved