| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Sistemul FEAT ofera urmatoarele tipuri de calcul dinamic:
Analiza modurilor proprii vibratie,
Analiza vibratiilor fortate pentru incarcari la care este definita variatia in timp sau pentru cutremure definite prin accelerograma,
Analiza seismica bazata pe raspunsul spectral.
Toate calculele dinamice sunt dezvoltate ca fiind calule de ordinul unu, adica liniare. Prin urmare, urmatoarele fenomene nu pot fi analizate simultan cu aceste tipuri de calcule:
Suporturi si fundatii neliniar elastice,
Bare actionand numai la compresiune sau numai la intindere.
Cu toate acestea, calculul dinamic poate fi aplicat pentru structurile cu proprietatile mentionate mai sus. Dar, ambele tipuri de neliniaritati vor fi neglijate iar ecuatiile de echilibru vor fi asamblate pentru structura nedeformata. Rigiditatea fundatiilor neliniare vor fi deduse pentru deformatia egala cu zero iar barele definite ca actionand numai la compresiune sau numai la intindere vor fi considerate bare normale.
De asemenea coeficientii de lucru (vezi capitolul Error! Reference source not found. nu vor fi luati in considerare la efectuarea calculelor dinamice.
Masa inertiala a structurii (sau a elementelor individuale) este calculata automat din densitatea masica a materialului. Este folosit acelasi parametru din care este calculata incarcarea din greutate proprie in cazul analizei statice. Daca sunt folosite unitatile de masura recomandate: kPa, kN, si m, atunci unitatea de masura corespunzatoare pentru masa si densitate va fi tona si t/m3 (de asemenea si incarcarea din greutate proprie corespunde regulei de mai sus: masa in tone multiplicata cu acceleratia gravitationala (constanta gravitationala) 9.98 yrezulta greutatea in kN). O formulare consistenta se aplica si in cazul efectelor inertiale: matricea maselor nefiind asadar una diagonala ci una plina.
In plus, pot fi incluse mase inertiale concentrate (folosind functia din preprocesor Structura / Avansat / Mase). Masa este plasata intr-un punct de contact. Generatorul va crea un nod in pozitia punctului de contact iar masa va fi asociata acestui nod. Masa este caracterizata de patru parametrii (intr-un proiect 3D). Acestia corespund masei proprii si a trei momente rotationale de inertie in jurul axelor globale de coordonate. Masa rotationala (sau momentul de inertie rotational) este de regula diferit pe directiile individuale dar influenta sa nu este de regula semnificativa si asadar ea este in general estimata sau definita ca fiind egala cu zero.
Efectele celorlalte incarcari definite ca incarcari permanente pot fi luate in considerare in analiza dinamica. Acestea sunt de obicei chiar necesare. De regula, masa structurilor suplimentare cum ar fi finisajele pe plansee, pereti ne-structurali, echipamente etc. trebuie sa fie adaugate masei structurii desi ele sunt definite de cele mai multe ori ca incarcari. FEAT ofera posibilitatea, la cererea utilizatorului, de a transforma toate incarcarile definite ca permanente in mase. Incarcarea este transformata in masa prin impartirea valorii incarcarii cu acceleratia gravitationala (constanta gravitationala). Efectul inertial al acestor mase este considerat pe toate cele trei directii, cu toate ca incarcarea a fost definita numai pe o singura directie (de exemplu pe directia Z). Astfel pot fi definite mase de forme arbitrare ca incarcari punctuale, liniare si de suprafata. Optiunea (daca incarcarea permanenta va fi inclusa sau nu) poate fi setata in caseta de dialog pentru definirea parametrilor calculului (functia din preprocesor Calcul / Calculare - optiunea Adaugare incarcari permanente la masa structurii). Aceasta optiune este disponibila numai daca reteaua de elemente finite nu a fost inca generata. Daca reteaua de elemente finite exista deja (existand de asemenea si rezultatele) optiunea va fi inaccesibila deoarece datele maselor sunt stocate in datele retelei de elemente finite.
Programul FEAT este capabil sa rezolve modurile proprii de vibratie ale unei structuri. Utilizatorii care nu sunt familiarizati cu dinamica structurilor sunt sfatuiti sa studieze teoria descrisa in de exemplu in lucrarea . In acest manual vor fi descrise numai ipotezele de baza folosite pentru rezolvarea acestui tip de probleme.
In statica, sistemul ecuatiilor de echilibru pot fi scrise
![]()
unde simbolurile reprezinta:
![]() - matricea de rigiditate a
structurii,
- matricea de rigiditate a
structurii,
![]() - vectorul deplasarilor
(generalizate), adica vectorul variabilelor necunoscute ale sistemului de
ecuatii,
- vectorul deplasarilor
(generalizate), adica vectorul variabilelor necunoscute ale sistemului de
ecuatii,
![]() - vectorul incarcarilor,
adica vectorul elementelor din partea dreapta a sistemului de
ecuatii.
- vectorul incarcarilor,
adica vectorul elementelor din partea dreapta a sistemului de
ecuatii.
In dinamica, fortele de inertie trebuie adaugate fortelor statice ecuatiile de echilibru scriindu-se:
![]()
unde simbolurile reprezinta:
![]() - matricea maselor structurii,
- matricea maselor structurii,
![]() - vectorul acceleratiilor,
adica vectorul derivatelor de ordinul doi ale deplasarilor
functie de timp.
- vectorul acceleratiilor,
adica vectorul derivatelor de ordinul doi ale deplasarilor
functie de timp.
Daca structura vibreaza armonic cu frecventa w adica toate
deplasarile (componentele individuale ale vectorului deplasarilor)
variaza in timp cu frecventa w, adica ![]() ) vectorul acceleratiilor este dat de relatia:
) vectorul acceleratiilor este dat de relatia:
![]() .
.
Aceasta inseamna, in cazul analizei dinamice, ca ecuatiile
de echilibru sunt scrise ca o suma de forte elastice, fortele de
inertie si incarcarile. Ecuatiile de echilibru pot fi
scrise pentru o valoare instantanee a amplitudinii (de exemplu la momentul cand
![]() ) astfel:
) astfel:
![]() .
.
Formula poate fi rescrisa ca:
![]() .
.
Expresia din paranteze din partea stanga a ecuatiei ![]() reprezinta rigiditatea
tinand cont de proprietatile inertiale si este
denumita de regula matricea de rigiditate dinamica. Problema
calcularii frecventelor proprii de vibratie (adica a
modurilor proprii de vibratie) se rezuma la a cauta acele
frecvente pentru care structura vibreaza 'de la sine', adica
pentru care structura are rigiditate dinamica zero. Aceasta se
intampla cand determinantul matricei de rigiditate dinamica este egal
cu zero. Cu alte cuvinte, se vor cauta frecventele pentru care
sistemul de ecuatii
reprezinta rigiditatea
tinand cont de proprietatile inertiale si este
denumita de regula matricea de rigiditate dinamica. Problema
calcularii frecventelor proprii de vibratie (adica a
modurilor proprii de vibratie) se rezuma la a cauta acele
frecvente pentru care structura vibreaza 'de la sine', adica
pentru care structura are rigiditate dinamica zero. Aceasta se
intampla cand determinantul matricei de rigiditate dinamica este egal
cu zero. Cu alte cuvinte, se vor cauta frecventele pentru care
sistemul de ecuatii
![]()
are solutia diferita de zero. Aceasta problema se
numeste problema de valori proprii. Vectorul deplasarilor ![]() exista si
are valori diferite pentru fiecare frecventa proprie
exista si
are valori diferite pentru fiecare frecventa proprie ![]() . Vectorul corespunde formei de vibratie cu frecventa
. Vectorul corespunde formei de vibratie cu frecventa ![]() si este numit mod propriu. Din ecuatia de mai sus se vede
ca daca vectorul deplasarilor unui mod propriu este multiplicat
cu o valoare constanta nu se produce nici o modificare (deoarece termenul
din partea dreapta a ecuatiei matriceale este egal cu zero). Aceasta
inseamna ca magnitudinea vectorului deplasarilor modurilor
proprii de vibratie (marimea deplasarilor) nu are nici o
importanta; ceea ce este important fiind forma deformatei structurii
si nu magnitudinea ei. In continuare, modurile proprii sunt de regula
normalizate - vezi [6]. Formele rezultate (modurile) calculate de FEAT sunt
normalizate in asa fel incat acestea sa satisfaca conditia:
si este numit mod propriu. Din ecuatia de mai sus se vede
ca daca vectorul deplasarilor unui mod propriu este multiplicat
cu o valoare constanta nu se produce nici o modificare (deoarece termenul
din partea dreapta a ecuatiei matriceale este egal cu zero). Aceasta
inseamna ca magnitudinea vectorului deplasarilor modurilor
proprii de vibratie (marimea deplasarilor) nu are nici o
importanta; ceea ce este important fiind forma deformatei structurii
si nu magnitudinea ei. In continuare, modurile proprii sunt de regula
normalizate - vezi [6]. Formele rezultate (modurile) calculate de FEAT sunt
normalizate in asa fel incat acestea sa satisfaca conditia:
![]()
Trebuie mentionat de asemenea ca prin modul de formulare a problemelor de valori proprii vor rezulta atatea solutii cate elemente diferite de zero exista pe diagonala principala a matricei maselor, echivalent cu numarul de grade de libertate ale maselor structurii. Termenul de solutie se refera aici la frecventa proprie (valoarea proprie) si forma corespunzatoare (modul propriu).
Metoda de iteratii pe subspatii este folosita pentru a rezolva problema de valori proprii. Aceasta metoda calculeaza numarul necesar al celor mai mici moduri proprii (adica modurile cu cele mai mici frecvente). Asadar nu este posibila definirea intervalului de frecvente ce va fi analizat. Numai numarul de frecvente proprii analizate poate fi setat. Daca se doreste gasirea frecventelor inalte trebuie marit numarul de valori proprii necesare. Pentru a reduce timpul de calcul se foloseste metoda de rezolvare prin iteratii pe subspatii ce calculeaza intern un numar putin mai mare de vectori proprii decat numarul de moduri proprii necesar.
Procedurile pentru evaluarea rezultatelor problemei de valori proprii in postprocesor sunt analoge celor folosite in analiza statica.
Numarul de moduri proprii este nelimitat. Metoda de iteratii pe subspatii nu garanteaza explicit faptul ca cele mai mici frecvente proprii incepand cu prima din ele vor fi gasite (vezi [6]). Din acest motiv, programul foloseste testul Sturm ce verifica si garanteaza faptul ca valorile proprii calculate sunt cele mai mici si ca nici un mod propriu nu a fost sarit sau omis. Aceasta nu se intampla pentru structurile obisnuite dar, totusi, in cazul unor sisteme speciale unele frecvente proprii ar putea fi omise. Deoarece testul Sturm nu este atat de mult consumator de timp precum este procesul de rezolvare a problemei proprii, se recomanda ca acesta sa fie folosit intotdeauna cand se efectueaza acest tip de calcule. (vezi in continuare - setarea parametrilor de calcul).
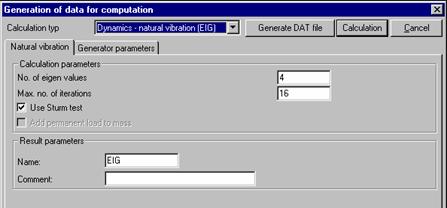
Procedura de setare a parametrilor este similara cu cea folosita pentru alte tipuri de calcule si poate fi efectuata in caseta de dialog deschisa la activarea functiei Calcul / Calculare - pagina Vibratii proprii.
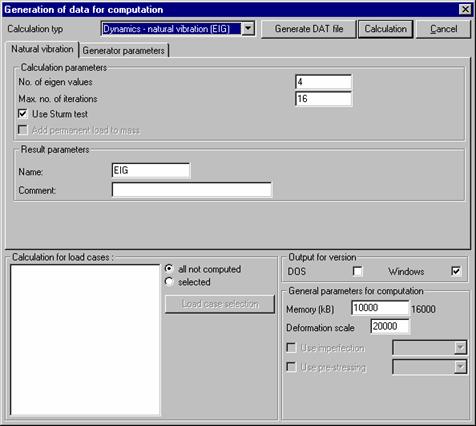
Optiunile existente au urmatoarele semnificatii:
Numarul de valori proprii - numarul de moduri proprii necesare incepand cu primul mod propriu,
Numarul maxim de iteratii - numarul de iteratii efectuate pana la terminarea calculului,
Se foloseste testul Sturm - se verifica faptul ca s-au gasit modurile proprii corespunzatore si ca nici unul din ele nu a fost omis,
Se adauga incarcarea permanenta la masa structurii - vezi capitolul
Nume - numele de baza ale modurilor proprii calculate,
Comentariu - o nota ce este atasata modurilor proprii calculate.
Optiunile din partea din dreapta jos a casetei de dialog sunt aceleasi pentru toate tipurile de calcule. Aceasta inseamna ca, atat imperfectiunile cat si precomprimarile pot fi definite si luate in considerare. Aceasta poate fi util de exemplu pentru calcularea vibratiilor structurilor sustinute de cabluri sau pentru orice structuri mixte sustinute de cabluri - vezi capitolele Error! Reference source not found., Error! Reference source not found., Error! Reference source not found..
Calculul vibratiilor proprii nu este o problema foarte complexa. Cu toate acestea, trebuie subliniat un lucru. Pentru a obtine un numar mare de moduri proprii (si implicit de frecvente proprii) trebuie folosita o retea fina de elemente finite. Aceasta este valabil atat pentru bare cat si pentru elementele plane (vezi capitolul Error! Reference source not found.). Efectul densitatii retelei va fi demonstrat pentru un cadru plan simplu.
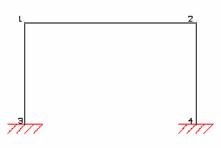
Cadrul este compus din trei componente de tip bara. Impartirea implicita a retelei de elemente finite se face considerand un singur element finit pentru fiecare componenta. Aceasta inseamna ca vom avea trei elemente finite si patru noduri din care doua noduri sunt suporturi. Structura are sase grade de libertate daca este rezolvata ca problema 2D (tensiuni plane). Gradele de liberate sunt translatia verticala, translatia orizontala si o rotatie in fiecare colt. Prin urmare vor putea fi calculate maxim sase moduri proprii pentru aceasta structura. Daca cereti calcularea unui numar de moduri proprii mai mare decat gradele de libertate ale structurii veti fi avertizati asupra acestui lucru printr-un mesaj iar calcularea va fi oprita. Mai mult, calculul va fi terminat anormal chiar si daca se solicita calcularea a numai sase moduri proprii deoarece algoritmul lucreaza intern cu un numar mai mare de moduri proprii (cum a fost explicat anterior). Faptul ca al cincilea si al saselea mod propriu nu vor fi calculate in acest exemplu are un avantaj semnificativ. Daca ar fi calculate se va constata o eroare numerica semnificativa cauzata de reteaua grosiera a elementelor finite. Asadar, rezultatele calculate pentru ultimele doua moduri de vibratie vor fi practic inutilizabile. Prin urmare, daca se doreste calcularea frecventelor proprii inalte, structura va trebui impartita intr-o retea de elemente finite mai fina. Pentru a oferi o comparatie se prezinta in continuare rezultatele obtinute pentru o retea de grosiera si pentru o retea fina de elemente finite. Se poate vedea clar ca desi primul mod propriu este aproape identic pentru ambele variante celelalte moduri proprii difera semnificativ.
De exemplu, deformatia barei orizontale este complet diferita datorita absentei nodurilor (gradelor de libertate masice) din mijlocul deschiderii. Acelasi fenomen poate fi observat pentru cea de-a treia frecventa proprie unde si valoarea frecventei difera semnificativ. Frecventa proprie a cadrului cu un numar mai mic de grade de libertate este mai mare datorita absentei gradelor de libertate masice, adica datorita unei cantitati mai mici de energie inertiala in energia totala de deformatie a sistemului. Aceasta eroare creste rapid cu cresterea frecventei.
Divizare grosiera Divizare fina
Raspunsul a doua tipuri de actiuni dinamice pot fi rezolvate:
Orice incarcare (concentrata, liniara sau de suprafata) cu o variatie in timp definita. Pentru a defini incarcarea trebuie ca unui caz de incarcare sa-i fie asociata o functie de timp. Pentru a analiza raspunsul unor incarcari cu o variatie oarecare in timp trebuie efectuat calculul unei combinatii de cazuri de incarcare in care fiecare caz de incarcare va avea o functie de timp diferita.
Un seism reprezentat printr-o accelerograma.
Ecuatia de echilibru pentru o structura in vibratie contine si efectul amortizarii (efectul de amortizare a fost omis in capitolul anterior). Aceasta poate fi scrisa ca:
![]()
unde
![]() - matricea de amortizare,
- matricea de amortizare,
![]() - prima si cea
de-a doua derivata a vectorului deplasarilor functie de timp
(adica viteza si acceleratie).
- prima si cea
de-a doua derivata a vectorului deplasarilor functie de timp
(adica viteza si acceleratie).
Vectorul ![]() reprezinta incarcarea la un moment dat, ceea
ce inseamna ca acest vector este egal cu vectorul
incarcarilor pentru respectivul caz de incarcare multiplicat cu
magnitudinea functiei de timp la acel moment.
reprezinta incarcarea la un moment dat, ceea
ce inseamna ca acest vector este egal cu vectorul
incarcarilor pentru respectivul caz de incarcare multiplicat cu
magnitudinea functiei de timp la acel moment.
Amortizarea este introdusa sub forma de amortizare Rayleigh. Cu alte cuvinte, matricea de amortizare este o combinatie liniara a matricei de rigiditate si a matricei maselor.
![]() .
.
Unde:
aK este amortizarea proportionala cu vectorul deplasarilor,
bM este amortizarea proportionala cu deformatia.
Vibratiile fortate sunt rezolvate prin intermediul integrarii directe folosind metoda Newmark. Principiul metodei poate fi comparat cu calculul static standard luand insa in considerare fortele inertiale si efectul de amortizare. Calculul este efectuat in pasi de timp individuali. Acceleratia necesara pentru determinarea fortelor inertiale si de amortizare este calculata la inceputul si la sfarsitul fiecarui pas de timp. De fapt, mai intai, se asambleaza matricea de rigiditate modificata a structurii. Apoi, matricea este triangularizata. In final, calculul fiecarui pas reprezinta solutia vectorului necunoscutelor pentru valorile specifice instantanee ale 'incarcarii'. Astfel poate fi estimat si timpul necesar de calcul.
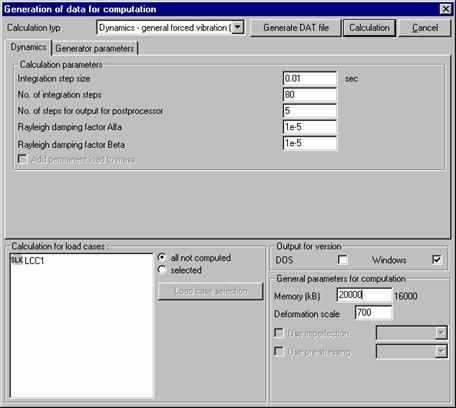
Parametrii calculului se definesc in acelasi fel ca si in cazul altor tipuri de calcule. Caseta de dialog a functiei Calcul / Calculare este prezentata mai jos.
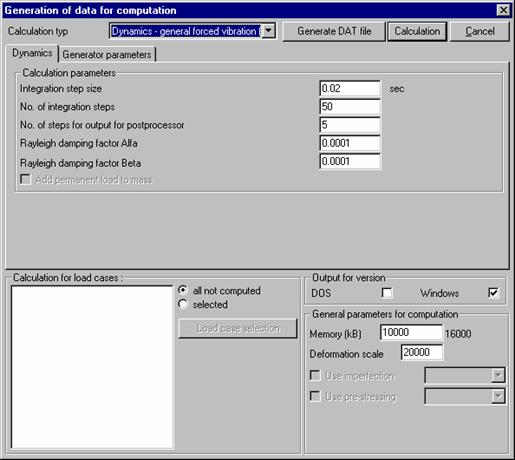
Optiunile individuale au urmatoarele semnificatii:
Marimea pasului de integrare - marimea (lungimea) pasului de integrare. In general, marimea pasului trebuie sa fie egala sau mai mica decat o sesime din perioada de vibratie ce se presupune a fi analizata. De asemenea trebuie luata in considerare si modul de distributie in timp a incarcarii aplicate.
Numarul pasilor de integrare - defineste intervalul total de timp ce va fi modelat,
Numarul de pasi pentru postprocesor - prin calculul se vor obtine periodic, pentru postprocesor, valorile deplasarilor si a fortelor interne pentru fiecare pas din numarul total de pasi de integrare indicat aici,
Factorul de amortizare Rayleigh Alpha si Beta - vezi paragraful anterior,
Se adauga incarcarea permanenta la masa structurii - vezi capitolul
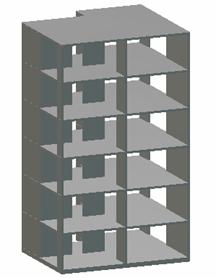
Sa consideram exemplul unei mori de tip presa.
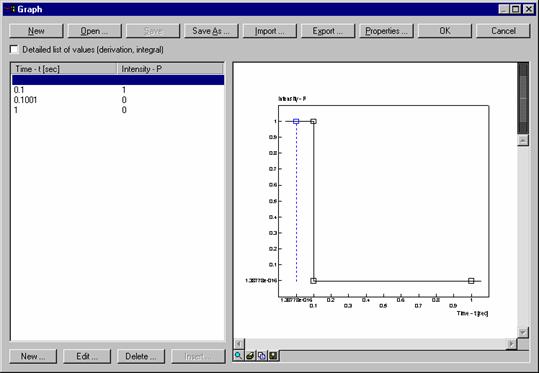
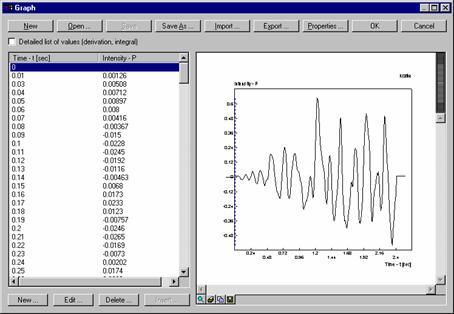
In figura se prezinta modelul structural si o incarcare concentrata verticala. Acestei forte ii va fi asociata o functie de timp definita prin intermediul functiei Structura / Gestiune functii. Functia de timp reprezinta un impact ce dureaza 0.1 sec afisat in figura urmatoare.
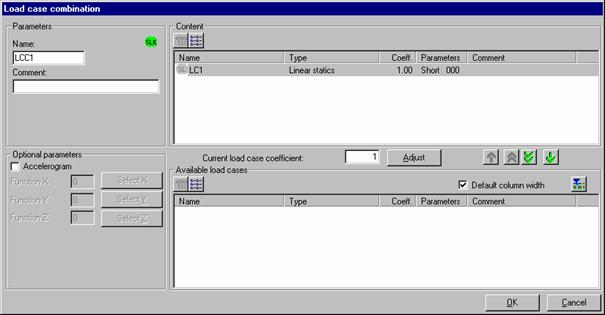
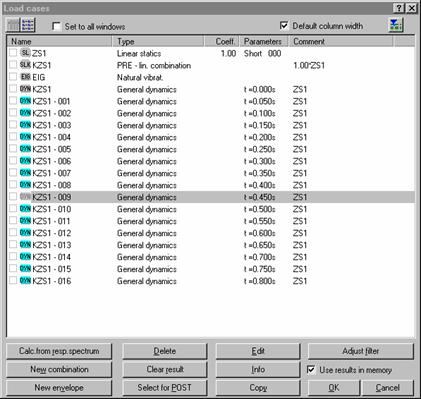
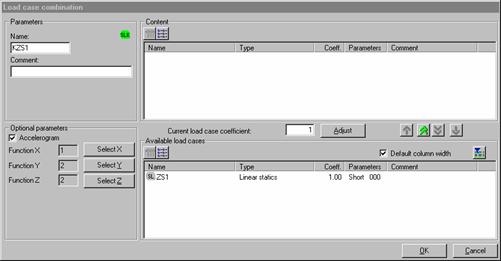
Se asociaza functia de timp cazului de incarcare unde a fost definita forta. Asocierea poate fi efectuata in caseta de dialog unde se definesc toti parametrii cazurilor de incarcare - vezi mai jos.
Calculul vibratiilor fortate este efectuat la nivelul combinatiei de cazuri de incarcare. Aceasta se face pentru a permite analiza mai multor incarcari cu diferite distributii in timp. Acest fel de actiuni trebuiesc definite in cazuri de incarcare separate fiecarui caz de incarcare putand sa-i fie asociata functia de timp dorita. In final, toate cazurile de incarcare sunt combinate intr-o combinatie iar calculul este efectuat pentru acea combinatie. Caseta de dialog pentru realizarea combinatiei este prezentata mai jos.
Valorile parametrilor folositi pentru analiza exemplului sunt prezentati in figura urmatoare.
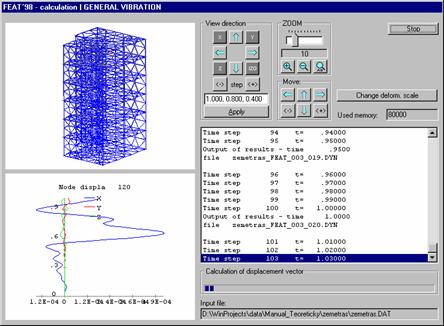
Cele doua desene care apar in caseta de dialog urmatoare sunt permanent redesenate in timpul efectuarii calculului. Primul din ele reprezinta desenul structurii analizate si a deformatiei ei la anumite momente de timp. Cel de-al doilea desen reprezinta diagramele translatiilor (pe axele orizontale) per timp (pe axa verticala). Diagrama este desenata pentru punctul unde se detecteaza cea mai mare translatie la primul moment de timp. Acest punct este marcat cu o cruciulita pe desenul structurii. Trebuie subliniat ca curba translatiei functie de timp trebuie sa fie o curba rotunjita (fina). Daca curba nu este suficient de fina inseamna ca intervalul de timp (pasul de timp) este prea mare si, in consecinta, rezultatele pot fi distorsionate semnificativ.
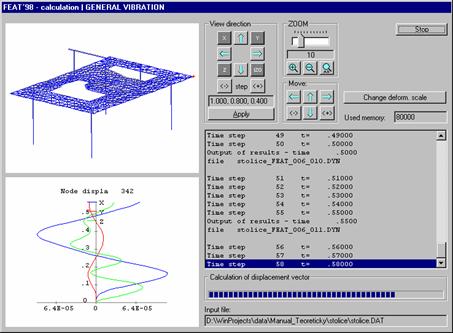
In figura anterioara se observa de asemenea un raport al calculului pe care programul procesorului il prezinta periodic pentru fiecare pas de integrare. Aceste rezultate reprezinta starea structurii la un moment dat de timp. In postprocesor acestea vor aparea si vor fi gestionate ca fiind "cazuri de incarcare" separate. Aceasta inseamna ca ele pot fi combinate intr-o combinatie de cazuri de incarcare sau intr-o diagrama infasuratoare - vezi figura de mai jos.
Calculul raspunsului seismic este derivat din ipotezele ce considera ca vibratia structurii este excitata de o miscare a suporturilor cu toate suporturile vibrand in acelasi mod. In FEAT nu are importanta in ce mod a fost definit suportul. Cu alte cuvinte, suportul poate fi definit ca fiind rigid sau elastic, ca fundatie izolata, ca talpa de fundatie sau ca radier general asezat pe o fundatie elastica (bara sau placa). Prin urmare, vectorul deplasarilor poate fi impartit in doua parti:
![]() ,
,
unde:
![]() - vectorul deplasarii totale (notatia
- vectorul deplasarii totale (notatia ![]() a fost folosita in capitolele anterioare),
a fost folosita in capitolele anterioare),
d - vectorul deplasarii corespunzand deplasarii structurii ca un corp rigid impreuna cu suporturile in miscare,
u - cealalta parte a vectorului deplasarii reprezentand deformatia elastica a structurii pe suporturile rigide.
Deoarece nu sunt produse forte interne in timpul deplasarii structurii ca un corp rigid, se poate scrie
![]() ,
, ![]() .
.
Ecuatia de echilibru poate fi atunci scrisa ca
![]() .
.
Asadar, efectul vibratiei suporturilor este asezat in
partea dreapta, adica este transformat intr-un vector de
incarcare al structurii. FEAT va transmite vectorul ![]() ca un rezultat ce reprezinta vectorul deplasarilor ce produc
forte interne, cu alte cuvinte, un vector ce nu considera deplasarea
suporturilor.
ca un rezultat ce reprezinta vectorul deplasarilor ce produc
forte interne, cu alte cuvinte, un vector ce nu considera deplasarea
suporturilor.
Accelerogramele pentru directiile globale individuale pot fi
definite separat in FEAT. Prin urmare vectorul![]() este impartit in trei vectori. Fiecare din ei corespund
deplasarii structurii ca un corp rigid in lungul uneia din axele globale.
este impartit in trei vectori. Fiecare din ei corespund
deplasarii structurii ca un corp rigid in lungul uneia din axele globale.
![]() .
.
Substituind in ecuatie conditiile de echilibru obtinute in forma
![]() ,
,
unde ![]() sunt valorile instantanee ale acceleratiei la un moment de timp dat t fiind definite prin
accelerograme.
sunt valorile instantanee ale acceleratiei la un moment de timp dat t fiind definite prin
accelerograme.
Analiza vibratiilor pentru o vibratie exercitata de un seism este controlata si gestionata in acelasi fel ca si calculul vibratiilor fortate datorate fortelor externe variabile in timp - vezi capitolul 3.1.1.
Structura prezentata in figura urmatoare va fi analizata in continuare.
O accelerograma poate fi definita folosind aceeasi procedura ca pentru functiile de timp descrise in exemplul anterior. O portiune a unei accelerograme artificiale ce este folosita pentru analiza seismica a uzinelor electrice a fost importate. Functia este aratata mai jos.
Si de aceasta data, trebuie creata o combinatie ca si in cazul incarcarii cu o forta ce variaza in timp. Dar, nici un caz de incarcare nu trebuie inserat in combinatie. Numai optiunea de folosire a accelerogramelor trebuie bifata din caseta de dialog pentru definirea combinatiilor iar accelerogramele definite pentru directiile globale dorite trebuiesc asociate combinatiei.
Calculul este apoi pornit in acelasi fel ca si in cazul analizei vibratiilor dinamice fortate oarecare. Caseta de dialog pentru exemplul analizat este prezentata mai jos.
Pentru a rezolva raspunsul seismic prin intermediul integrarii in timp a ecuatiei
![]()
poate fi o operatiune extrem de consumatoare de timp. Pe de alta parte, o alta metoda de calcul a raspunsului seismic poate fi foarte rapida cu conditia ca modurile proprii sa fie calculate.
Metoda se bazeaza pe calculul prin intermediul decompozitiei in
moduri proprii. Se sorteaza
modurile proprii intr-o matrice ![]() astfel incat vectorii proprii sa formeze coloana unei matrice.
Dupa aceea, vectorul deplasarilor la orice moment de timp poate fi
exprimat ca o combinatie liniara a modurilor proprii
astfel incat vectorii proprii sa formeze coloana unei matrice.
Dupa aceea, vectorul deplasarilor la orice moment de timp poate fi
exprimat ca o combinatie liniara a modurilor proprii
![]() ,
,
unde ![]() este un vector continand coeficientii combinatiei.
Principiul metodei decompozitiei se bazeaza pe substitutia
ultimei formule in ecuatia de echilibru anterioara multiplicand
si partea stanga cu matricea
este un vector continand coeficientii combinatiei.
Principiul metodei decompozitiei se bazeaza pe substitutia
ultimei formule in ecuatia de echilibru anterioara multiplicand
si partea stanga cu matricea![]() . In acest mod, sistemul de ecuatii de echilibru poate fi
impartit intr-un sistem de ecuatii independente unde
componentele vectorului
. In acest mod, sistemul de ecuatii de echilibru poate fi
impartit intr-un sistem de ecuatii independente unde
componentele vectorului ![]() sunt necunoscutele. Sistemul se
poate scrie
sunt necunoscutele. Sistemul se
poate scrie
![]() ,
,
unde ![]() este o matrice diagonala in care elementele
diagonale sunt egale cu patratele frecventelor circulare iar
este o matrice diagonala in care elementele
diagonale sunt egale cu patratele frecventelor circulare iar ![]() este o matrice diagonala unde elementele
diagonale sunt egale cu frecventele amortizarii pentru modurile
proprii individuale.
este o matrice diagonala unde elementele
diagonale sunt egale cu frecventele amortizarii pentru modurile
proprii individuale.
De asemenea
![]() ,
,
![]() ,
,
![]() .
.
Vectorii ![]() contin factorii modali pentru excitatia seismica
corespunzatoare. Solutia sistemului de ecuatii anterior pentru
obtinerea vectorului "necunoscutelor" q este data de integrala
Duhamel ce poate fi integrata numeric pentru un moment instantaneu de timp
t.
contin factorii modali pentru excitatia seismica
corespunzatoare. Solutia sistemului de ecuatii anterior pentru
obtinerea vectorului "necunoscutelor" q este data de integrala
Duhamel ce poate fi integrata numeric pentru un moment instantaneu de timp
t.
O transformare inversa are ca rezultat
![]() ,
, ![]() ,
,
unde ![]() este vectorul distributiei in timp a acceleratiei
absolute in directiile coordonatelor globale generalizate (a gradelor de
libertate).
este vectorul distributiei in timp a acceleratiei
absolute in directiile coordonatelor globale generalizate (a gradelor de
libertate).
Considerand ca excitatia seismica este definita nu
prin intermediul unei accelerograme ![]() ci numai prin
intermediul spectrului de raspuns al acceleratiilor absolute
ci numai prin
intermediul spectrului de raspuns al acceleratiilor absolute![]() . Spectrul de raspuns exprima dependenta raspunsului
maximal al unui sistem cu un singur grad de libertate de frecventa proprie
a sistemului. Acum, considerand spectrele
. Spectrul de raspuns exprima dependenta raspunsului
maximal al unui sistem cu un singur grad de libertate de frecventa proprie
a sistemului. Acum, considerand spectrele![]() pentru amortizarea corespunzatoare se extrag
valorile acceleratiei spectrale pentru frecventele
corespunzatoare modurilor proprii ale structurii analizate si se
sorteaza frecventele in matricele diagonale
pentru amortizarea corespunzatoare se extrag
valorile acceleratiei spectrale pentru frecventele
corespunzatoare modurilor proprii ale structurii analizate si se
sorteaza frecventele in matricele diagonale ![]() . Rezultatul va fi obtinerea urmatoarelor
formule.
. Rezultatul va fi obtinerea urmatoarelor
formule.
![]() ,
,
![]() ,
,
![]() .
.
In matricele ![]() se vor regasi, aranjate in coloane, acceleratiile de
raspuns maximal corespunzatoare modurile proprii individuale pentru
directiile globale respective. Aceste valori pot fi prezentate ca valorile
raspunsului pentru acele conditii in care structura vibreaza
numai intr-unul din modurile de vibratie corespunzatoare.
Contributiile tuturor modurilor proprii considerate ce iau parte la
vibratia structurii trebuie adunate impreuna. Suma finala
reprezinta acceleratia maxima pentru acea vibratie ce
contine toate modurile de vibratie considerate. Valoarea sumei nu
este, insa, o suma algebrica simpla a valorilor maximale
ale modurilor proprii individuale deoarece maximele pentru modurile de
vibratie individuale se produc la momente de timp diferite. Cea mai
probabila valoare pentru raspunsul maxim este, prin urmare, dat de
suma geometrica a valorilor modurilor proprii individuale.
se vor regasi, aranjate in coloane, acceleratiile de
raspuns maximal corespunzatoare modurile proprii individuale pentru
directiile globale respective. Aceste valori pot fi prezentate ca valorile
raspunsului pentru acele conditii in care structura vibreaza
numai intr-unul din modurile de vibratie corespunzatoare.
Contributiile tuturor modurilor proprii considerate ce iau parte la
vibratia structurii trebuie adunate impreuna. Suma finala
reprezinta acceleratia maxima pentru acea vibratie ce
contine toate modurile de vibratie considerate. Valoarea sumei nu
este, insa, o suma algebrica simpla a valorilor maximale
ale modurilor proprii individuale deoarece maximele pentru modurile de
vibratie individuale se produc la momente de timp diferite. Cea mai
probabila valoare pentru raspunsul maxim este, prin urmare, dat de
suma geometrica a valorilor modurilor proprii individuale.
![]() ,
,
unde
 ,
,
 ,
,
 .
.
![]() este vectorul patratelor raspunsului
acceleratiilor sistemului in modul propriu j pentru excitatia seismica actionand in lungul
directiei X.
este vectorul patratelor raspunsului
acceleratiilor sistemului in modul propriu j pentru excitatia seismica actionand in lungul
directiei X.
Formulele pentru celelalte variabile sunt analoage formulelor folosite pentru calculul acceleratiilor. In consecinta, valorile maximale ale valorilor sunt calculate din
![]() ,
, ![]() ,
, ![]() ,
,
unde![]() este o matrice diagonala unde elementele diagonale
reprezinta valorile inverse ale frecventelor proprii circulare ale
structurii. Similar, formulele de mai jos pot fi scrise pentru translatii
(deformatii).
este o matrice diagonala unde elementele diagonale
reprezinta valorile inverse ale frecventelor proprii circulare ale
structurii. Similar, formulele de mai jos pot fi scrise pentru translatii
(deformatii).
![]() ,
, ![]() ,
, ![]() .
.
Unde![]() este o matrice diagonala in care elementele diagonale
reprezinta valorile inverse ale patratelor frecventelor
circulare ale structurii. Fortele interne sunt calculate folosind
aceleasi proceduri ca si pentru deplasari. Valorile
deplasarilor din ecuatii trebuie doar sa fie substituite cu valorile
fortelor interne pentru deplasarile corespunzatoare pentru modul
propriu corespunzator. De exemplu, orice valoare a fortei interne in
orice punct al structurii exprimata pentru excitatia in lungul axei X
va fi calculata astfel
este o matrice diagonala in care elementele diagonale
reprezinta valorile inverse ale patratelor frecventelor
circulare ale structurii. Fortele interne sunt calculate folosind
aceleasi proceduri ca si pentru deplasari. Valorile
deplasarilor din ecuatii trebuie doar sa fie substituite cu valorile
fortelor interne pentru deplasarile corespunzatoare pentru modul
propriu corespunzator. De exemplu, orice valoare a fortei interne in
orice punct al structurii exprimata pentru excitatia in lungul axei X
va fi calculata astfel
![]() ,
,
unde ![]() este un vector linie
continand fortele pentru modurile proprii individuale. Suma tuturor
modurilor proprii este, inca o data, efectuata folosind
aceeasi procedura ca si in cazul acceleratiilor.
este un vector linie
continand fortele pentru modurile proprii individuale. Suma tuturor
modurilor proprii este, inca o data, efectuata folosind
aceeasi procedura ca si in cazul acceleratiilor.
Un lucru trebuie retinut cand este utilizat spectrul de raspuns pentru folosirea rezultatelor calculelor in vederea dimensionarii elementelor. Fortele interne reprezinta maximul ce poate fi atins in timpul unui seism intr-un anumit punct al structurii. Dar, toate maximele nu pot fi atinse simultan in acelasi timp. Acest lucru trebuie luat in considerare atunci cand rezultatele vor fir utilizate pentru dimensionarea sau pentru evaluarea capacitatii portante. De edxmplu, momentele si fortele axiale in stalpi nu formeaza variabile reciproc complementare dar structura trebuie dimensionata la efectul concurent al acestor forte. In special pentru stalpii din beton armat trebuie sa aveti grija ca o crestere a fortei axiale conduce fie la cresterea fie la descersterea gradului de utilizare (procentului de armare), adica a tensiunilor din sectiunea transversala.
Pentru analizarea excitatiei seismice cu considerarea simultana a incarcarilor statice (de exemplu greutatea proprie a structurii), trebuie "adaugate" una sau mai multe combinatii de rezultate ale calculului static modurilor proprii atunci cand este definita "combinatia" spectrului de raspuns. Rezultatele vor contine dupa aceea doua valori pentru fiecare punct al structurii - un maxim si un minim. Cele doua valori sunt obtinute din 'valoarea statica' prin adaugarea sau scaderea valorilor raspunsului spectral. Din acest punct de vedere, rezultatele spectrului de raspuns sunt tratate ca diagrame infasuratoare. In consecinta, pentru a afisa rezultatele in forma izoliniilor, numai una din laturi trebuie activata.
Metoda de calcul prin folosirea spectrului de raspuns va fi demonstrata pe aceeasi structura ce a fost utilizata pentru analiza raspunsului seismic prin intermediul accelerogramei (vezi capitolul 3.2.2). Mai intai trebuie calculate modurile proprii de vibratie. Apoi, trebuie definita functia spectrului de raspuns. Se pot defini spectre de raspuns diferite pentru fiecare directie globala.
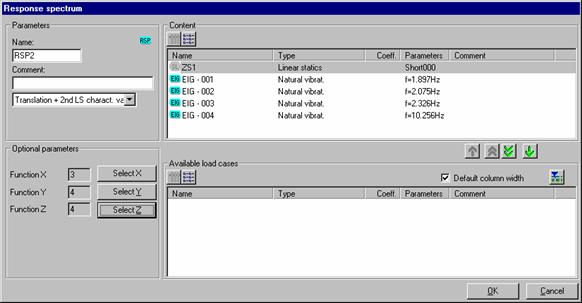
Calculul folosind raspunsul spectral este definit in acelasi mod in care se defineste diagrama infasuratoare in postprocesor (functia Afisare / Rezultate - butonul Calcul din spectrul de raspuns). Caseta de dialog care apare este aratata in figura anterioara. Spectrul pentru fiecare directie poate fi definit in partea din stanga a casetei de dialog iar modurile proprii si un caz de incarcare static (sau o combinatie de cazuri de incarcare statica) pot fi selectate in partea dreapta. De regula, toate modurile proprii calculate precum si incarcarea permanenta vor fi luate in considerare pentru efectuarea calculelor. Un exemplu de spectru de raspuns este prezentat in figura de mai jos.
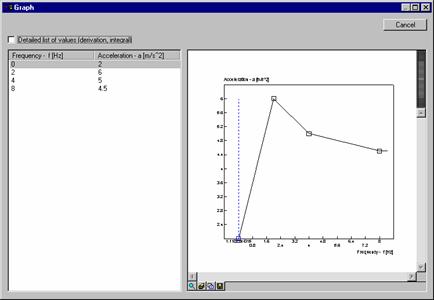
Rezultatele calculului spectrului de raspuns sunt similare diagramelor infasuratoare. Fiecare variabila este reprezentata prin doua valori - una maxima si una minima. Aceste valori corespund celor doua ramuri ale diagramei infasuratoare - vezi functia Rezultate / Diagrama infasuratoare.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2492
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved