| CATEGORII DOCUMENTE |
| Bulgara | Ceha slovaca | Croata | Engleza | Estona | Finlandeza | Franceza |
| Germana | Italiana | Letona | Lituaniana | Maghiara | Olandeza | Poloneza |
| Sarba | Slovena | Spaniola | Suedeza | Turca | Ucraineana |
A NEW ON-OFF TEMPERATURE CONTROL ALGORITHM
FOR ELECTRICAL OVENS AND HEATING BATTERIES
Abstract Electric ovens and heating batteries of different types are processes with time constant (T) and dead time (τ) in the ratio τ/T< 0.2; consequently, temperature on-off control of such processes is usually used. However, this kind of control has the appearance disadvantage of some temperature oscillations with the amplitude dependent on many factors. In this paper a new on-off control algorithm based on the principle of an inverted hysteresis is proposed, in order to improve the dynamic and steady state performance of the temperature control. To control the temperature of an electric heating battery, a conventional on-off control algorithm and an on-off control algorithm with inverted hysteresis are implemented, both with the aid of the development medium LabVIEW. The utility of the proposed algorithm results after the control performance comparison.
Keywords on-off controllers, control algorithms, temperature control.
1. Introduction
The conventional temperature on-off control is based on the following [1]:
- if the process temperature is lower than the set point, the supply nominal voltage is applied on the heating elements;
- if the process temperature is greater than the set point, the heating elements are disconnected from the voltage supply.
The final output element of an on-off controller is usually an electromechanical relay or a contactor [2], [3]. In both cases mobile contacts realize the closing or opening of the electric circuits that supply the heating elements [4], [5]. Because of the electromechanical component parts (coils, elastic springs and mobile armature), the contacts closing and opening are realized with electrical and mechanical delays [6].
Consequently, the static characteristics of these on-off controllers have an insensibility zone (hysteresis) 2Δ, on all sides of the set point SP, as presented in fig. 1 [7]. In a temperature conventional control loop with inertial process (dead time τ and time constant T) and inertial transducer (with time constant Tt) after the implementation of an on-off controller and after the linearization of non-linear characteristics in an exponential form, it results a dynamic behavior like in fig. 2. In the system appear self maintained auto oscillations of the controlled parameter on both sides of the ideal value SP, with the amplitude 2X dependent on the value of the controller insensibility zone 2Δ, respectively on time constants T, Ti and dead time τ.
Fig. 1. - The conventional on-off controller static characteristic:
SP-set point; PV-process variable; U-feed voltage; Δ insensibility zone.
Because of the process inertia and the transducer inertia, the resulting oscillations amplitude 2X is bigger than the insensibility zone 2Δ of the on-off controller [1]. More, even at 2Δ ≈ 0, in the system annoying oscillations appear.
Fig. 2.- The evolution of the temperature Θ and the actuating signal U for conventional on-off control: 1- the oven temperature; 2-the transducer temperature.
The big amplitude 2X of the temperature oscillations is due to as a matter of fact that the disconnecting, respectively the connecting of the heating elements from the power supply, is performed at the moments t1, t2, etc., when the transducer temperature reaches the release value (SP+Δ), respectively the connecting value (SP-Δ), and not at moments when the oven temperature reaches the mentioned values. Because of these delays, the power source delivers in the oven a supplementary thermal energy that is accumulated in the brickwork and in the treated pieces from the oven. The oscillations 2X amplitude depends on the following elements: the controller 2Δ insensibility zone, the oven and transducer dynamic behaviors, the oven power reserve, the transducer assembling place, the oven load, etc. The temperature control quality is characterized by the overshoot value after the oven start moment, by the oscillations 2X amplitude and by the realized temperature average value. If the oscillations are symmetrically given by the reference SP, then the temperature average value will coincide with the set point, otherwise a ΔSP error appears so much the more the oscillations are more non symmetrically over the set point [8].
2. On-off controller with inverted hysteresis
In order to decrease the presented drawbacks, caused by the delayed disconnection over the set point, in the paper it is proposed and experimented a new on-off control algorithm, named with inverted hysteresis. The static characteristic of such controller is presented in fig. 3.
Fig. 3. - The static characteristic of
the on-off controller with inverted hysteresis: SP-set point;
PV-process variable; U-feed voltage.
It has been fond that the heating elements disconnecting from the power supply U is made in advance from the set point SP, achieving in this way an anticipated commutation.
3. Experimental achievements
First, in this paper will be presented the results concerning experimental tests performed on an electric heating battery, controlled with an conventional on-off controller [9], [10], than the results concerning experimental tests performed on the same process controlled with an on-off controller having an on-off control algorithm with inverted hysteresis. The diagram of the achieved experimental equipment is presented in fig. 4.
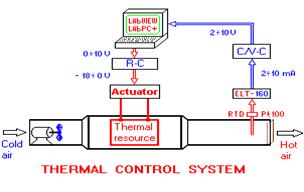
Fig. 4.- The thermal control system.
The achieved installation is composed of the above-mentioned process, equipped with a RTD Pt 100 transducer, signals converters and an IBM PC with a LabPC+ acquisition board. In the computer, the LabVIEW development medium is installed. The conventional on-off control algorithm (fig. 1) and the proposed control algorithm, with inverted hysteresis (fig. 3), have been implemented as Virtual Instruments in LabVIEW development medium.
In fig. 5 and 6 sequences from these algorithms are presented. In the first case, a symmetrically insensibility zone is realized.
Fig. 5.- Sequence from the conventional on-off control algorithm.
This symmetrically insensibility zone is adjustable by the operator with the help of a button on the frontal panel, the commutations are made at PV = SP + Δ = r1, respectively at PV = SP - Δ = r2.
In the second case, the insensibility thresholds are separately adjustable (Delta 1 and Delta 2 from fig. 6), with the aid of some buttons from the frontal panel of the application. Consequently, in this case, the commutations are made at PV = SP + Δ1 = r1, respectively at PV = SP Δ2 = r2. More, the control algorithm takes into account the controlled speed temperature variation (ΔPV).
 Fig. 6.- Sequence from the on-off control algorithm
with inverted hysteresis.
Fig. 6.- Sequence from the on-off control algorithm
with inverted hysteresis.
The experimental tests results
4.1. Control system with conventional on-off controller
After the conventional on-off control algorithm implementation (fig. 5) for the control system presented in fig. 4, some experimental results were obtained, for different values of the set point, of the symmetrically insensibility threshold, as well as for the cases when a transducer without protected sheath is used or when a transducer with protected sheath is used. The recording sequence obtained when a transducer with protected sheath is used and when the set point was 60 oC at the installation start, is presented in fig. 7. Then, the set point was modified from 60 oC to 90 oC. It is noticed the appearance of some non-symmetrical self-oscillations, with the amplitude 2X > 2Δ, because of the delayed disconnecting of the heating elements from the power supply, at PV=SP+Δ.
Fig. 7.- Conventional on-off control of an electric heating battery.
In table 1 are presented the results of the experimental data processing corresponding to the graphic from fig 7.
Table 1
Temperature control performance of conventional on-off controller with insensible zone symmetrically over SP
|
SP oC |
oC |
2X oC |
ΔSP oC |
||||
|
% from SP |
oC |
% from SP |
oC |
||||
|
| |||||||
4.2. Control loop with on-off controller with inverted hysteresis
The on-off control algorithm with inverted hysteresis, from fig. 6, was implemented for the control system presented in fig. 4. Some experimental results were obtained, for different values of the set point, of the symmetrically and non symmetrically insensibility threshold, as well as for the cases when a transducer without protected sheath is used or when a transducer with protected sheath is used. The recording sequence obtained when a transducer with protected sheath is used and when the set point was 60 oC at the installation start, is presented in fig. 8, for different insensibility threshold: Δ1 = 0.05 from the set point, respectively Δ2 = 0.15 from the set point. During the working, after the stabilization of the working conditions, the insensibility threshold, Δ1 respectively Δ2, were modified as in table 2. In table 2 are presented the results of the experimental data processing corresponding to the graphic from fig 8.
Fig. 8. The on-off control with inverted hysteresis of a heating battery.
Table 2
Temperature control performance with on-off controller with inverted hysteresis and nonsymmetrical insensible zone over SP
|
SP oC |
oC |
2X oC |
ΔSP oC |
||||||
|
% din SP |
oC |
oC |
oC |
||||||
Conclusions
After the comparing between the obtained experimental data, figures 7 and 8, as well as after the comparing between the control systems performance with conventional on-off controller (table 1) and the control systems performance with the on-off controller with inverted hysteresis (table 2), the using advantage of the last one is evident. The first heating elements disconnecting from the power supply is made, of course, in the moment when the increasing temperature reaches the Δ2 - SP threshold. By an adequately choosing of the Δ1 and Δ2 insensibility thresholds, depending on the plant dynamic performances, a pronounced reduction of the overshoot, the oscillations amplitude in the steady-state regime and a mean value unimportant sliding are obtained. This new control algorithm can be easy implemented on the diverse hardware and software components in order to obtain better performance. Another important advantage, in addition to the good dynamic performance refers to the using possibility of simple, cheap and robust on-off actuators (electromechanical contactors or static contactors).
R E F E R E N C E S
Zamfirescu L., Oprescu I., Automatizarea cuptoarelor industriale. Ed. Tehn. Buc., 1971.
Mihoc D et. al., Teoria si elementele sistemelor de reglare automata. Ed. Did. si Ped., Bucuresti, 1984.
Nitu C., Matlac I., Festila C., Echipamente electrice si electronice de automatizare. Ed. Did. si Ped., Bucuresti, 1983.
Radoi C. et. al., Circuite si echipamente electronice industriale. Ed. Tehn. Buc., 1986.
Dumitrache I. et. al., Automatizari electronice. Ed. Did. si Ped., Bucuresti, 1993.
Constantin P. et. al., Electronica industriala. Ed. Did. si Ped., Bucuresti, 1983.
Calin S., Regulatoare automate, Ed. Did. si Ped., Bucuresti. 1976.
Bnhidi L. et. al., Automatika mrnkknek. Tanknyvkiad, Budapest 1992.
Lazar C., Ingineria reglarii automate. Proiectarea sistemelor numerice de reglare automata. Vol.II. Universitatea Tehnica, Iasi, 1995.
Lazar C. et. al., Conducerea asistata de calculator a proceselor tehnice. Proiectarea si implementarea algoritmilor de reglare numerica. MATRIX ROM, Buc., 1996.
UN NOU ALGORITM DE REGLARE BIPOZITIONALA A TEMPERATURII PENTRU CUPTOARE ELECTRICE
(Rezumat)
Cuptoare electrice si baterii de incalzire de diverse tipuri sunt in mod obisniut obiecte reglate cu constanta de timp (T) si timp mort (τ), cu raportul τ/T< 0.2; in consecinta se foloseste frecvent metoda reglarii bipozitionale a acestora. Aceasta modalitate de reglare prezinta dezavantajul aparitiei unor oscilatii de temperatura a caror amplitudine depinde de mai multi factori. In aceasta lucrare se propune, se implementeaza si se experimenteaza un nou algoritm de reglare bipozitional, bazat pe principiul realizarii unui histerezis inversat, in vederea imbunatatirii performantelor dinamice si stationare ale reglarii temperaturii. Cu ajutorul mediului de dezvoltare LabVIEW, se implementeaza atat algoritmul de reglare bipozitional conventional cat si cel cu histerezis inversat propus, pentru reglarea automata a temperaturii unei baterii de incalzire electrica. In urma compararii efectelor de reglare, rezulta utilitatea utilizarii algoritmului propus.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1655
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved